基于球面坐標的目標定位位置的封閉解算法*
2017-09-22 03:26:43田麗芳
傳感技術學報 2017年9期
關鍵詞:測量
田麗芳
(黃淮學院信息工程學院,河南 駐馬店 463000)
基于球面坐標的目標定位位置的封閉解算法*
田麗芳*
(黃淮學院信息工程學院,河南 駐馬店 463000)
針對無線傳感網絡WSNs(Wireless Sensor Networks)的三維目標定位問題,提出基于接收信號強度RSS(
Signal Strength)和到達角度AoA(Angle of Arrival)混合目標定位RATL(RSS and AoA-based Target Localization algorithm)算法。RATL算法融合了RSS和AoA觀察值。通過將笛卡爾坐標轉換球面坐標,并充分利用AoA測量值的優勢,RATL算法建立測量值與未知目標位置間的關系,進而獲取簡單、封閉解。相比于現在算法,RATL算法并不要求更多松馳。實驗數據表明,RATL算法比同類算法的復雜度低、定位精度高。
無線傳感網絡;目標定位;接收信號強度;到達角度
1 定位模型
令x∈R3表示目標未知位置。而N個已知錨節點表示為ai∈R3,i=1,…,N。通過結合RSS測距和角度測距算法估計目標位置,定位模型如圖1所示。
假定目標位置的笛卡爾坐標為x=[xx,xy,xz]T,而第i個錨節點的笛卡爾坐標為ai=[aix,aiy,aiz]T。圖1中的di、φi和αi分別表示目標離第i個錨節點間距離、方位角和仰角。

圖1 定位模型
由于RSS測距無需額外硬件設備[17],利用RSS值進行測距。假定目標與i個錨節點間的RSS值Pi,定義如式(1)所示[18]:

(1)

通過全向天線或天線陣列可獲取AoA測量。因此,利用簡單的幾何理論,可得到方位角和仰角[8]測量值:
(2)

(3)

假定觀察矢量θ=[PT,φT,αT],且θ∈R3N,其中P=[Pi]、φ=[φi]和α=[αi]。
假定高斯白噪聲的概率密度函數如式(4)所示:
(4)
式中:σi=[σni,σmi,σνi]T。
而函數f(x):f(x)=
(5)
(6)
2 RATL定位算法
RATL定位算法框圖如圖2所示。首先,通過將笛卡爾坐標轉換成球面坐標,降低算法復雜度,然后分別在已知發射功率和未知發射功率兩種情況下進行位置估計。同時,分別利用最大似然估計算法,計算距離權值和基于功率權值。利用這些權值分別優化已知發射功率和未知發射功率條件下的WLS位置估計算法,最終獲取目標位置的閉合解。
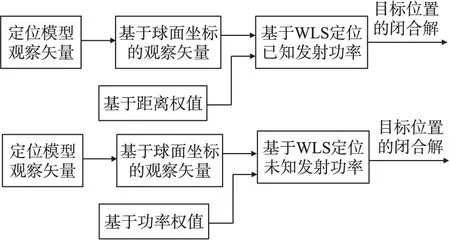
圖2 RATL定位算法模型
2.1 球面坐標
首先,對式(6)進行轉換成輕量表述。同時將笛卡爾坐標轉換成球面坐標,進而獲取有效解,這也有利于表述角度測量值。因此,式(1)~式(3)可分別重寫為:
λi‖x-αi‖≈ηd0i=1,…,N
(7)
(8)
kT(x-ai)≈‖x-α‖cos(ai)i=1,…,N
(9)

通過轉換球面坐標,可將x-αi表述為:
x-αi=riui:ri≥0,i=1,…,N
(10)
式中:‖ui‖=1為單位矢量。
利用AoA信息表述單位矢量ui,可得:ui=[cos(φi)sin(αi),sin(φi)sin(αi),cos(αi)]
(11)
利用式(10)和式(11)代入式(7)和式(9),可得:

(12)

(13)
接下來,從兩種情況討論估計目標節點位置。這兩種情況分別是:已知發射功率PT和未知發射功率PT。
2.2 已知發射功率PT
為了獲取更準確表述鏈路差異,RATL算法引用了權值。目標與第i個錨節點的權值Wi可表述為:
(14)

從式(14)可知,距離越短,權值越大。原因在于:離目標越近,RSS和AoA測量值的誤差小的概率越大。RSS測量值與距離有多個乘性因子[17],這導致偏遠鏈路與鄰近鏈路的誤差更大。為此,使用權值的AoA測量值進行調整,如圖3所示。
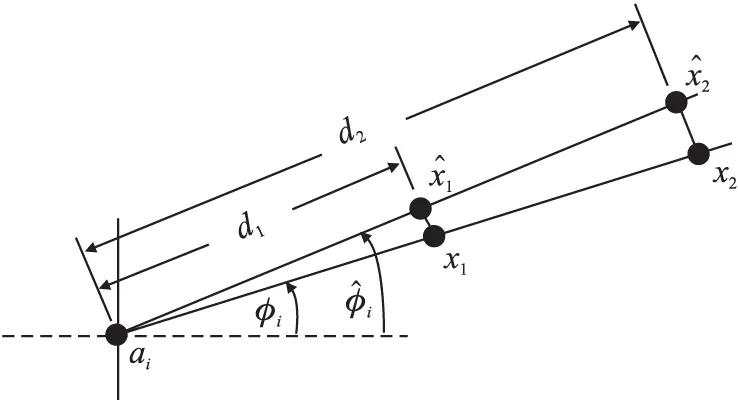
圖3 基于權值的AoA測量值
依據權重最小二乘法,并結合式(8)、式(12)~式(14),可得目標位置的估計值:

(15)
將式(15)寫成一般的矢量形式,如式(16)所示:
(16)
式中:W=I3?diag(W),其中?表示克羅內克積。且矢量A可表示為:
(17)
而矢量b的定義如式(18)所示:
(18)
因此,式(16)的閉合解可表述為:
(19)
2.3 未知發射功率
在實際環境中,可能難以獲取發射功率PT,即多數情況PT是未知的。因此,本小節討論在未知發射功率環境下,如何估計目標位置。
(20)
依據WLS原理,可得:

(21)
式(21)也可表述為:
(22)
(23)

(24)
因此,式(21)的閉合解可表述為:
(25)
3 性能分析
3.1 算法復雜性
復雜性是算法性能的一項重要指標。為此,選擇文獻[9]的最小二乘LS算法(已知發射功率)、文獻[14]的已知發射功率的SOCP算法、文獻[15]的已知發射功率的SR-WLS算法和文獻[16]的已知發射功率的WLLS算法作為參照。選用SR-WLS算法作為參照,原因在于SR-WLS算法也是引用RSS和AoA的混合定位算法,與RATL算法具有比較性。
它們的算法復雜性如表1所示,其中N表示錨節點數。而RATL-K、RATL-UK分別表示已知發射功率、未知發射功率下的目標定位算法。

表1 算法復雜性
從表1可知提出的RATL算法復雜性并不高于同類算法,且與N呈線性關系。
3.2 算法位置估計準確性
為了分析算法的性能,引用MATLAB建立仿真平臺。實驗參數如表2所示,其中路徑衰落指數PLE不采用固定值,而是使其服從均勻分布,即γi~U[2.2,2.8],且i=1,…,N。此外,通信半徑為250 m,節點總數為50。
本小節分析算法定位的準確性,選用定位均方誤差RMSE作為性能指標,其定義如式(26)所示:
(26)
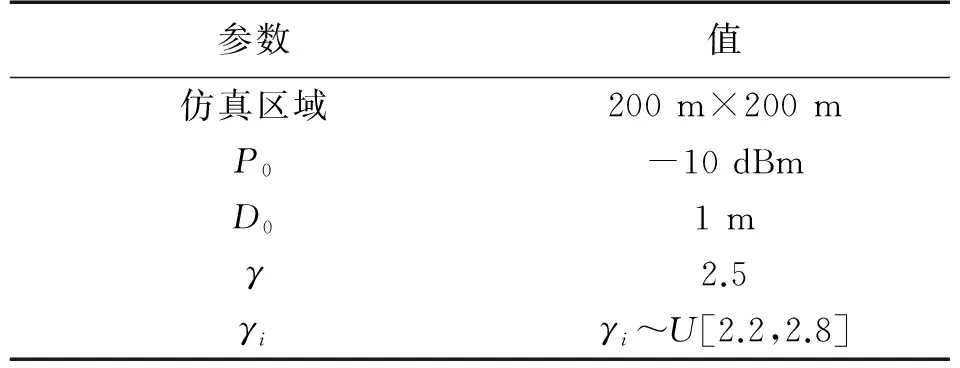
表2 仿真參數
首先分析錨節點數N對RMSE的影響。實驗數據如圖4所示,其中σni=6 dB、σmi=10和συi=10。從圖4可知,各算法的RMSE隨N的增加而下降。原因在于,錨節點數越多,越能獲得更多測距信息,有利于測距準確性的提高。此外,與其他算法相比,提出的RATL算法降低了RMSE,提高了定位準確性。即使在未知發射功率的情況下,RATL算法的RMSE仍低于同類算法,這說明利用AOA和RSS的混合算法,在不增加算法復雜度同時,提高了算法的定位精度。

圖4 RMSE隨N的變化曲線

圖5 RMSE隨測距噪聲σni的變化曲線(N=4)
然后,再分別分析測距噪聲σni、方位角測量誤差σmi和仰角測量誤差σνi對RMSE的性能影響,N=4。實驗數據分別如圖5~圖7所示。
觀察圖5~圖7可知,不同的測量誤差對RMSE性能影響存在差異。不難發現,所有算法隨著測距誤差的增加,算法的RMSE性能下降。然而,它們的下降速度并不相同。例如,RSS測距誤差對RATL算法的RMSE影響較小。而AoA測量值對RMSE有較大的影響,原因在于:RATL算法更依賴于角度測量值,而不是測距測量值。此外,與同類算法相比,提出的RATL算法的RMSE得到有效地下降,這充分說明RATL算法能有效地降低定位誤差。
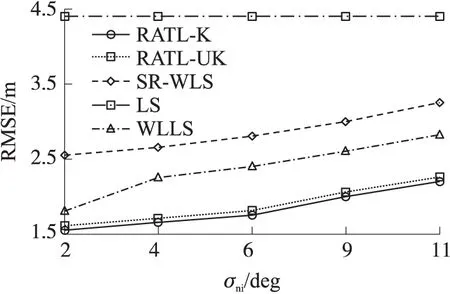
圖6 RMSE隨方位角測量誤差σmi的變化曲線(N=4)

圖7 RMSE隨仰角測量誤差σνi的變化曲線(N=4)
4 總結
針對3-D的目標定位問題,提出基于RSS和AoA的混合定位算法RATL。RATL算法通過轉換坐標,并結合AoA測距優勢,建立測距值與目標位置間關系,再通過WLS算法獲取目標位置的封閉解。實驗數據表明,提出的RATL算法有效地提高了定位精度,降低了定位均方誤差。
通過實驗數據可知,RATL算法降低了RMSE。然而,由于RATL算法需要測量RSS和角度信息,只適合中小型WSNs應用場景。
[1] Bartoletti S,Dai W,Conti A,et al. A Mathematical Model for Wideband Ranging[J]. IEEE J Sel Topics Signal Process,2015,9(2):216-228.
[2] Tomic S,Beko M,Dinis R. RSS-Based Localization in Wireless Sensor Networks Using Convex Relaxation:Non-Cooperative and Cooperative Schemes[J]. IEEE Trans Veh Technol,2015,64(5):2037-2050.
[3] Tomic S,Beko M,Dinis R. Distributed RSS-AoA Based Localization with Unknown Transmit Powers[J]. IEEE Wireless Commun Lett,2016,5(4):392-395.
[4] 劉卉,李澤軍. 基于投影矢量的雙組播樹高效路由數據收集[J]. 傳感技術學報,2013,26(4):570-577.
[5] Dai W,Shen Y,Win M Z. Energy-Efficient Network Navigation Algorithms[J]. IEEE J Sel Areas Commun,2015,33(7):1418-1430.
[6] Dai W,Shen Y,Win M Z. Distributed Power Allocation for Cooperative Wireless Network Localization[J]. IEEE J Sel Areas Commun,2015,33(1):28-40.
[7] 李云飛,江明,婁柯. 無線傳感器網絡中DV-Hop定位算法的改進[J]. 計算機工程與應用,2014,50(3):79-83.
[8] 金純,葉誠,韓志斌. 無線傳感器網絡中DV-Hop定位算法的改進[J]. 計算機工程與設計,2013,34(2):401-405.
[9] Yu K. 3-D Localization Error Analysis in Wireless Networks[J]. IEEE Trans Wireless Commun,2016,6(10):3472-3481.
[10] Wang S,Jackson B R,Inkol R. Hybrid RSS/AOA Emitter Location Estimation Based on Least Squares and Maximum Likelihood Criteria[C]//Proc IEEE QBSC,Kingston,ON,Canada,2012:24-29.
[11] Gazzah L,Najjar L,Besbes H. Selective Hybrid RSS/AOA Weighting Algorithm for NLOS Intra Cell Localization[C]//Proc IEEE WCNC,Istanbul,Turkey,Apr. 2014::2546-2551.
[12] Chan Y T,Chan F,Read W,et al. Hybrid localization of an Emitter by Combining Angle-of-Arrival and Received Signal Strength Measurements[C]//Proc IEEE CCECE,Toronto,ON,Canada,2014:1-5.
[13] Biswas P,Aghajan H,Ye Y. Semidefinite Programming Algorithms for Sensor Network Localization Using Angle Information[C]//Proc Annu Asilomar Conf Signals Syst Comput,Pacific Grove,CA,USA,2015:220-224.
[14] Tomic S,Marikj M,Beko M,et al. Hybrid RSS-AoA Technique for 3-D Node Localization in Wireless Sensor Networks[C]//Proc IWCMC,Dubrovnik,Croatia,Aug. 2015:1277-1282.
[15] Tomic S,Beko M,Dinis R. 3-D Target Localization in Wireless Sensor Network Using RSS and AoA Measurement[J]. IEEE Trans Veh Technol,2015,6(8):34-42.
[16] Khan M W,Salman N,Kemp A H,et al. Localization of Sensor Nodes with Hybrid Measurements in Wireless Sensor Network[J]. Sensors,2016,16(7):1-16.
[17] Patwari N,Ash J N,Kyperountas S,et al. Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J]. IEEE Signal Process Mag,2015,22(4):54-69.
[18] Rappaport T S. Wireless Communications:Principles and Practice. Upper Saddle River,NJ,USA:Prentice-Hall,1996.
[19] Kay S M. Fundamentals of Statistical Signal Processing:Estimation Theory. Englewood Cliffs,NJ,USA:Prentice-Hall,1993.

田麗芳(1981-),女,漢族,山西長治人,碩士,講師,研究方向為軟件測試,算法設計。
AClosed-FormforSphericalCoordinates-BasedTargetLocalizationAlgorithminWirelessSensorNetworks*
TIANLifang*
(School of Information Engineering,Huanghuai University,Zhumadian He’nan 463000,China)
This paper addresses the problem of target localization in a 3-D space in Wireless Sensor Networks(WSNs). We propose a novel target localization algorithm for 3-D space that merges RSS and AoA observations,which is marked as RATL. By shifting from Cartesian to spherical coordinates and taking advantage of the acquired AoA measurements,we build new relationships between the measurements and the unknown target location,which results in a simple and closed-form solution. In contrast to the existing methods,the proposed one does not require further relaxations(which enlarge the set of possible solutions). The new method is computationally light and our numerical results show that it provides excellent accuracy,surpassing the state-of-the-art methods in general.
wireless sensor networks;target localization;received signal strength;angle of arrival
Signal Strength)和到達角度AoA(Angle of Arrival)混合目標定位RATL(RSS and AoA-based Target Localization algorithm)算法。通過球面坐標轉換建立測距值與目標位置的關系,然后推導了簡單的閉合求解位置算法。實驗數據表明,提出的RATL定位算法具有低的定位誤差,并且在發射功率未知環境下估計目標位置。
項目來源:基于物聯網的光伏溫室大棚系統構建研究(2015GGJS-300)
2017-03-23修改日期:2017-05-23
TP393
:A
:1004-1699(2017)09-1433-05
10.3969/j.issn.1004-1699.2017.09.023
由于在軍隊和工程應用的重要性[1-6],目標定位已受到廣泛關注。多數無線定位算法依賴于測距算法[3]。常見的測距算法有基于到達時間ToA(Time of Arrival)、接收信號強度RSS(Received Signal Strength)和到達角度AoA(Angle of Arrival)[7-8]。
目前,研究人員已提出了不同測距或角度的定位算法[9-16]。文獻[9]提出了線性最小二乘LS(Least Squares)定位算法。而文獻[10]提出基于LS和最大似然關系ML(Maximum Likelihood)估計的混合定位算法。而文獻[11]提出了基于權重LS(Weighted LS,WLS)的RSS/AoA測距的混合定位算法。類似地,文獻[12]也提出了基于WLS的RSS差/AoA混合定位算法。而文獻[14]提出SOCP(Second Order Cone Programming)算法,通過SOCP降低算法復雜度,并提高定位精度。而文獻[16]提出權重線性估計WLLS(Weighted Linear LS)算法。
這些算法具有一定的代表性,但是,這些算法均存在不足。文獻[10-13]提出的算法僅是基于2-D場景,而文獻[12]只適用于低噪聲功率環境。文獻[13-15]提出的定位算法引用了復雜數學表述,這極大地增加了算法的復雜度。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00