微弱GPS信號避開比特跳變的捕獲算法
2017-09-20 06:02:09,,
導航定位與授時 2017年5期
, ,
(北京航空航天大學,北京 100191)
微弱GPS信號避開比特跳變的捕獲算法
程燕,常青,李顯旭
(北京航空航天大學,北京100191)
為了提高全球定位系統(Global Positioning System,GPS)接收機的靈敏度,信號捕獲過程需要加長積分時間。分析了比特跳變對加長相干積分時間的限制,從而提出一種能夠完全避免比特符號跳變的捕獲算法。該算法通過對多組數據采用相干積分和非相干積分相結合的方法,比較各組積分結果并選取積分最大值,用來判決是否捕獲。算法中相干積分時間為19ms,目的是使積分最大值組完全避開數據位跳變,避免導航數據符號跳變對相干積分值的影響。該算法在避開比特跳變的基礎上最大程度地提高相干積分時間,提高GPS接收機的捕獲靈敏度。仿真結果表明,該算法能有效地捕獲到載噪比(Carrier to Noise Rate,CNR)低至26dB·Hz的信號,可有效提高GPS接收機的捕獲靈敏度。
相干積分;比特符號跳變;非相干積分;高靈敏度
0 引言
在全球導航衛星系統(Global Navigation Satellite System,GNSS)接收機中,捕獲是信號處理的第一個關鍵環節。接收機在開始信號跟蹤之前,需要首先估算出接收信號的載波頻率和碼相位這2個參數。然后根據這些估計值初始化跟蹤環路,來幫助接收通道展開對信號的跟蹤,而信號捕獲的目的正是為了獲取所有可見衛星信號的載波頻率和碼相位的粗略估計值[1]。
然而,在實際環境下,GNSS接收機廣泛應用于弱信號環境下,例如:室內、森林遮擋等,這些環境下衛星信號的載噪比(Carrier to Noise Rate,CNR)比在戶外開放環境下信號的載噪比低20dB左右[2]。傳統的捕獲算法很難捕獲到該弱信號,因此,這就要求我們提高軟件接收機對弱信號捕獲的靈敏度[3]。
一般提高靈敏度的弱信號捕獲算法是延長積分時間。相干積分、非相干積分和差分非相干積分是常用的弱信號累積方法[4]。根據最大似然準則,延長相干積分時間是提高捕獲靈敏度最有效的方法。但是導航數據位的符號跳變,限制了相干積分時間。GPS的導航電文數據速率為50bit/s,即每20ms都有可能發生比特符號跳變[5],在比特起始位置未知時,相干積分時間不能超過20ms。
為了捕獲弱信號,半比特算法[6]通常應用于GPS L1 C/A碼弱信號捕獲中,該算法相干積分時間為10ms,由于相鄰兩組10ms數據最多只有一組存在比特翻轉,將接收信號分成10ms為一段的數據塊,并對奇偶塊分別進行非相干積分,比較奇偶塊的非相干積分值,將較大的積分值與捕獲門限相比較,并判決是否捕獲。
文獻[7]提出全比特算法,將相干積分時間延長至20ms。首先在20ms數據塊內用相干積分,然后不同20ms數據塊之間用非相干積分。由于數據比特符號翻轉的位置未知,要在每個可能的比特位置開始積分,這樣會形成20組結果。非相干積分最大值組就代表與導航數據比特近似同步情況下的積分值。
半比特算法能有效避開導航數據位翻轉的影響,但是相干積分時間只有10ms,不利于提高捕獲靈敏度。全比特算法粗略的估計比特符號翻轉的位置,只能確定比特翻轉的位置在非相干積分值最大組起始的1ms之內,但不能確定1ms內的具體位置。因此,對于該20ms內的相干積分仍可能存在正負抵消,從而使得該20ms數據塊的相干積分值被衰減,由周期性可知,隨后連續的信號中每20ms數據塊的相干積分值都有可能受到跳變而引起衰減,從而降低了信噪比。
針對以上算法的優缺點,本文提出一種避開比特跳變的算法,算法中相干積分時間為19ms,在完全避開比特跳變的基礎上,充分延長了相干積分時間,提高了捕獲靈敏度。
1 信號模型和數據位跳變
1.1 GPS L1 C/A信號模型
GPS衛星信號經過接收模塊,降頻、采樣和量化后,轉化為中頻數字信號,接收機信號處理部分都是從數字中頻信號開始的。接收機收到的中頻信號模型[8]為

w(n)
(1)
其中,A是信號幅度,d(n)代表電文速率為50Hz的導航數據信號,c(n)為C/A碼,碼長為1023chips,碼速率為1.023MHz。fIF為中頻頻率,fd為多普勒頻移,τ是碼時延,φ0是初始相位,w(n)是均值為0,方差為σ2的加性高斯白噪聲。Ts=1/fs,fs為采樣頻率。
捕獲系統一般是基于處理接收信號和本地信號相關得到的互模糊函數(Cross Ambiguity Function,CAF),互模糊函數可定義為
(2)
由于串行搜索方法相關運算的計算量大,為了減少捕獲時間,通常將時域相關運算轉化為頻域相乘,采用并行頻域搜索算法[9]。
互模糊函數可以通過并行搜索的捕獲方法式(3)得到。
(3)

1.2 數據位跳變的影響
在計算互模糊函數時,假設導航數據符號在相干積分期間是不變的。但是,在沒有輔助信息時,一個C/A碼周期內,數據位符號是有可能跳變的。
當導航數據符號跳變時,d(nTs)變為雙脈沖信號,如圖1[10]所示,Nτ是用離散時間符號表示的碼延遲。
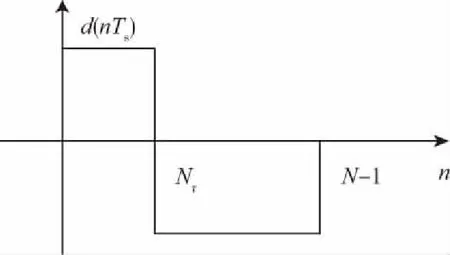
圖1 數據位
在不考慮噪聲的情況下,對接收信號和本地復制信號進行一個C/A碼周期的相干積分,并且在多普勒頻移和碼延遲都是對齊時,互模糊函數的包絡隨著比特符號變化的位置而變,如式(4)所示,對應圖如圖2所示。
S(τ,fd)=Nτ-(N-Nτ)
(4)
式中,S(τ,fd)為互模糊函數的包絡,N為在相干積分時間為一個C/A碼周期時,沒有數據位跳變時的互模糊函數的包絡峰值。Nτ是用離散時間符號表示的碼延遲。
從圖2[8]可以看出,當數據位翻轉發生在碼周期的中間時,互模糊函數的包絡峰值會消失。考慮到噪聲和多徑信號,當數據符號跳變接近C/A碼周期中間時,接收機很有可能捕獲不到正確的多普勒頻移和碼延遲。
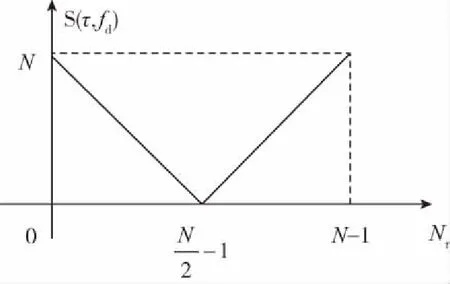
圖2 數據位翻轉不同位置時互模糊函數包絡Fig.2 CAF envelop at different bit transition location
2 傳統高靈敏捕獲算法及其問題
2.1 半比特算法
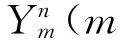
半比特方法需要計算2個非相干積分量。從觀測區間內中頻信號中任取一點作為處理數據的起始點,把后面的接收數據劃成2N(N為整數)個持續時間為10ms的相干積分區間塊,把每10ms的數據塊都進行相干積分,相干積分結果記為:Ym(m=1,2,3,…,2N)。然后把奇數塊和偶數塊的相干積分值分別進行非相干累加,如式(5)所示。
(5)
最后將Y=max(Ysum1,Ysum2)作為最終捕獲判決量。這種處理方式,可以保證其中至少有一組非相干積分值不受導航數據跳變的影響。
2.2 全比特算法
半比特算法的有效相干積分時間為10ms,為了進一步延長相干積分時間,可以將相干積分時間延長至20ms,即全比特算法。
(6)
其中,n為組數,n=1,2,3,…,20。
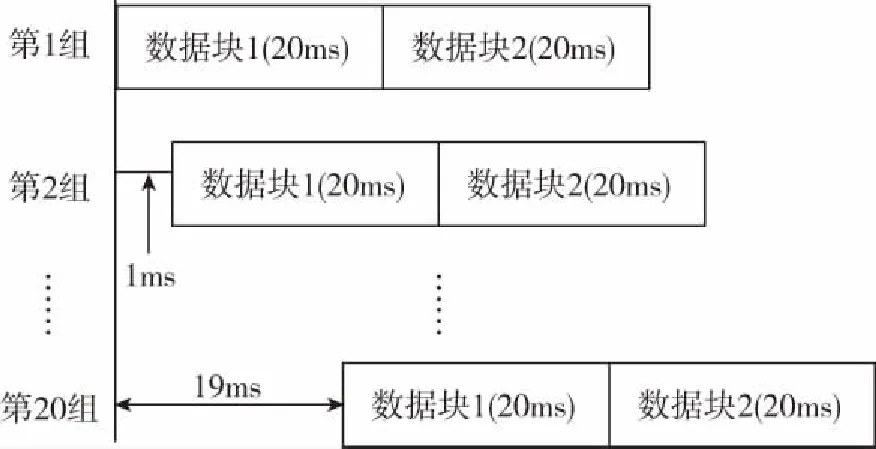
圖3 全比特算法原理圖Fig.3 Schematic diagram of the full-bits algorithm
取Y=max(Y1,Y2,…,Y20)作為判決量與門限比較完成捕獲。
2.3 傳統算法存在的問題
半比特算法能夠避免數據位的跳變,但是對20ms的數據進行處理,有效的相干積分時間只有10ms,相干積分時間較短,不利于捕獲較弱的信號。
全比特算法將相干積分時間延長至20ms,并將數據分成20組,每組分別進行非相干積分,目的是估計出數據位跳變的大致位置。但是該算法只能確定跳變位置在最大非相干積分組的第1個1ms內的某一點。如圖3所示,假設第2組為積分最大值組,即Y=max(Y1,Y2,…,Y20)=Y2,則可知,數據位跳變位置在第2組中數據塊1的第1個1ms內的某個數據采樣點,若采樣頻率fs為124MHz,則1ms內的采樣點數為fs/1000=124000,即數據位跳變的位置在第2組第1個1ms內的124000中的某個采樣點上。由于導航數據比特周期為20ms,隨后每個數據塊中的第1個1ms內均有可能存在跳變。也就是說,每個20ms的數據塊相干積分期間仍然有可能存在數據位跳變,數據塊內的相干積分值仍然存在正負抵消問題,互模糊函數的幅值會因此受到衰減。假設數據位跳變由負跳為正,雖然負數部分持續時間不到1ms,但是若負數部分相干積分值較大時,當其與數據塊內正數部分相干積分值相加,會大大衰減正數部分相干積分值,從而大大影響本數據塊最后的相干積分值。
因此,全比特算法只是大致估計了數據位跳變的位置,仍然沒有避免數據位跳變對相干積分值的影響。當數據位跳變頻繁時,假設導航數據為010101……,而且算法處理的數據起始點并不在數據跳變的邊沿時,此時全比特算法算出的最大非相干積分值Y,受跳變影響很大,且會影響相關峰值,從而降低信噪比。
3 避開比特跳變的捕獲算法
3.1 改進算法原理
為了完全避開數據位跳變的影響,本文提出一種相干積分時間為19ms的捕獲算法,該算法能夠完全避免數據位跳變的影響,提高信噪比。
(7)
取Y=max(Y1,Y2,…,Y20)與判決門限相比,判斷是否能夠捕獲。
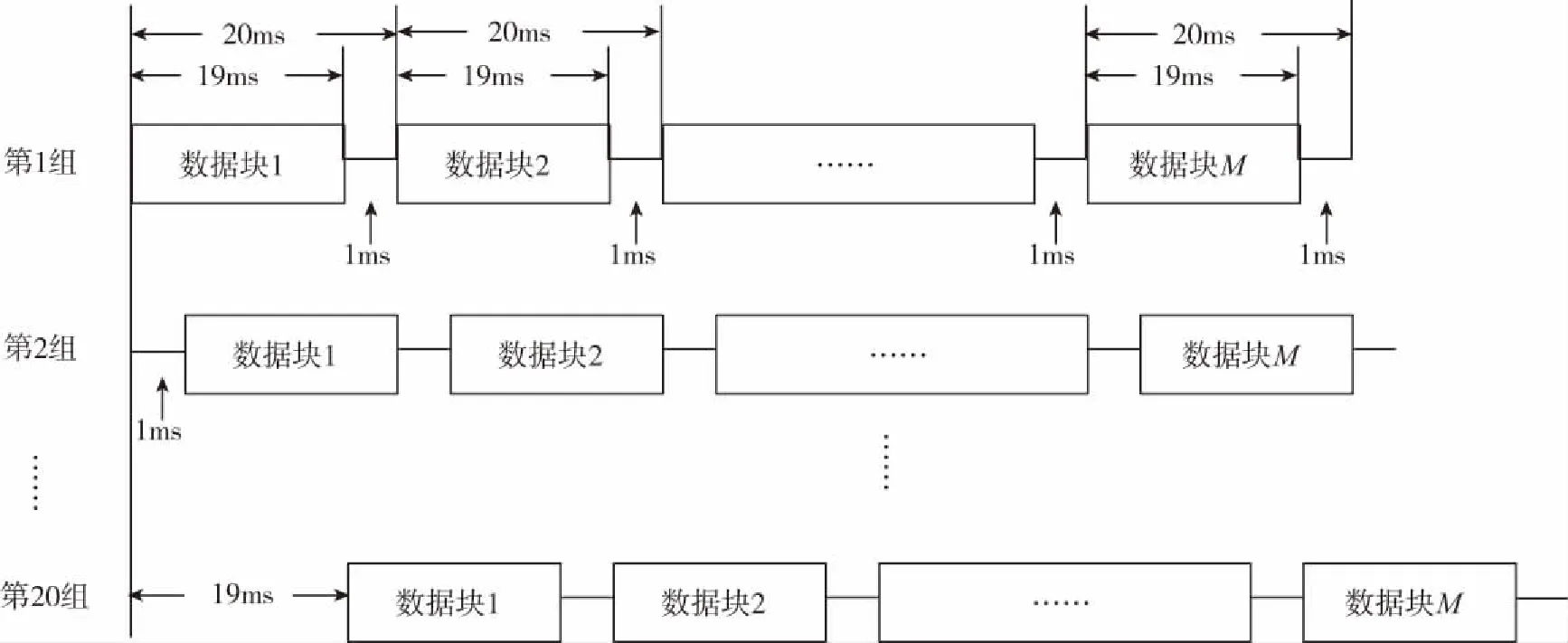
圖4 避開比特跳變算法的原理圖Fig.4 Schematic diagram of the avoiding bit transition algorithm
該算法根據非相干積分最大值可估計出數據位跳變大致位置,但是為了完全避開數據位跳變,每個數據塊的最后1ms不參與相干積分計算。這樣可以保證積分最大值組完全不包含數據位的跳變,完全避開數據位跳變對相干積分值的削弱,從而提高捕獲的靈敏度。
3.2 改進算法流程
該算法具體流程描述如下:
1)數據段的選擇。任選一點作為數據段的起點,從此點后選取每20ms為一個數據塊,共選擇M個數據塊作為第1組數據,其余19組依次延遲1ms。
2)計算相干積分和非相干積分。處理每一組數據時,對每一個數據塊中的前19ms進行相干積分,每個數據塊中的最后1ms不進行處理,然后對M個數據塊的積分結果進行非相干累加,如式(7)所示。
3)求非相干積分最大值并進行判決。求20組非相干積分值的最大值Y=max(Y1,Y2,…,Y20),并與設定好的捕獲門限A進行比較。若Y≥A,則捕獲成功,積分最大值組的數據完全不含導航數據位的跳變;反之,則捕獲失敗。
4 仿真分析
為了驗證本文算法的可行性,在Matlab環境下對其進行仿真。
仿真產生的中頻信號為40.098MHz,采樣頻率為124MHz。
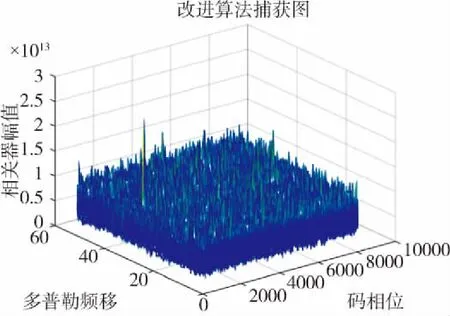
將該算法與半比特算法進行相比,對于載噪比CNR=29dB·Hz的信號,在處理信號長度為80ms時,本算法和半比特算法仿真結果對比如圖5所示。
(a) 改進算法 (a) Improved algorithm
(b) 半比特算法(b) Half-bits algorithm圖5 改進算法與半比特捕獲圖比較Fig.5 Comparison of the improved algorithm and the half-bits algorithm
圖5中改進算法有明顯的峰值,噪底較小,能夠正常捕獲;但是半比特算法峰值不明顯,噪聲很大,不能正確捕獲信號。對于半比特算法,加長信號的長度,就能捕獲到載噪比CNR=29dB·Hz的信號。
對于載噪比為26dB·Hz的信號,半比特算法已經不能捕獲,但是本文算法仍然能夠捕獲,此時采用的信號長度為120ms,捕獲圖如圖6所示。從圖6中可以看出,CNR降到26dB·Hz時,相對于CNR=29dB·Hz,噪底有所增加,但是峰值仍然很突出,能夠正常捕獲。
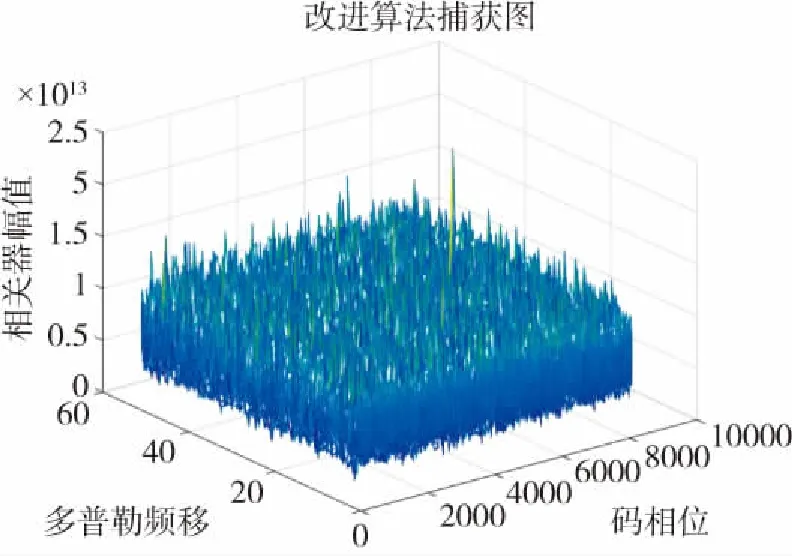
圖6 改進算法,CNR=26dB·HzFig.6 Improved algorithm, CNR=26dB·Hz
通過仿真可知,本文提出的算法能夠捕獲載噪比為26dB·Hz的信號,而半比特算法只能捕獲到29dB·Hz的信號。在處理相同時間長度的信號時,本文算法出現的峰值很明顯,峰值幅度較大,表現出明顯的優勢,而半比特算法峰值不明顯,不能正確捕獲。因此,本文算法可提高檢測概率,提高捕獲靈敏度。
5 結論
本文分析了比特跳變和傳統弱信號捕獲算法存在的問題,并提出了完全避開比特跳變的算法,該算法將相干積分時間延長至19ms,在完全避開比特跳變的基礎上,最大程度地延長了積分時間。通過與傳統弱信號捕獲算法仿真對比顯示,該算法提高了檢測概率,并且能夠捕獲載噪比低至26dB·Hz的信號,提高了軟件接收機的捕獲靈敏度。
[1] 謝鋼.GPS原理與接收機設計[M].北京: 電子工業出版社,2009:349.
[2] Macgougan G D.High sensitivity GPS performance analysis in degraded signal environments[J].Geomatics Engineering University of Calgary, 2003.
[3] Subburaj K, Bhatara S, Tangudu J, et al.Spurmitigation in high-sensitivity GNSS receivers[J].IEEE Transactions on Circuits & Systems II Express Briefs, 2014, 61(2):100-104.
[4] Borio D, Akos D.Noncoherent integrations for GNSS detection: analysis and comparisons[J].IEEE Transactions on Aerospace & Electronic Systems, 2009, 45(1):360-375.
[5] Akos D M, Normark P L, Lee J T, et al.Lowpower Global Navigation Satellite System (GNSS) signal detection and processing[C]//Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, 2000:784-791.
[6] Lin D M, Tsui J B.A software GPS receiver for weak signals[C]//Proceedings of the 2001 IEEE MTT-S International Microwave Symposium Digest.Piscataway: IEEE, 2001: 2139-2142.
[7] Psiaki M L.Block acquisition of weak GPS signals in a software receiver[C]//Proceedings of Ion GPS.Salt Lake City, 2001: 2838-2850.
[8] Zhu C, Fan X.A novel method to extend coherent integration for weak GPS signal acquisition[J].IEEE Communications Letters, 2015, 19(8):1343-1346.
[9] Foucras M, Ekambi B, Bacard F, et al.Optimal GNSS acquisition parameters when considering bit transitions[C]//Position, Location and Navigation Symposium-PLANS 2014, 2014 IEEE/ION.IEEE, 2014:804-817.
[10] Zhu C, Fan X.GNSS signal acquisition in weak signal condition[C]//Networks & Digital Signal Processing of the International Symposium on Communication Systems.IEEE, 2014: 1128-1132.
AvoidingBitTransitionAcquisitionAlgorithmforWeakGPSSignal
CHENGYan,CHANGQing,LIXian-xu
(BeiHangUniversity,Beijing100191,China)
In order to enhance the sensitivity of Global Position System (GPS) receivers, increasing the coherent integration time is necessary for the signal acquisition process.This paper analyzes how the bit sign transition limits the coherent integration time and proposes a novel acquisition algorithm to avoid the bit sign transition limitation.The method employs coherent integration combing with non-coherent integration.By comparing the integration results of the several blocks, the maximum integration result is selected and is used to determine whether to acquire.The algorithm extends the coherent integration time to19ms.The purpose is to make the block of the maximum integration result completely avoid bit transition, and avoid the influence of navigation data bit transition on the results of the coherent integration.The algorithm extends the coherent integration time to the greatest extent on the basis of avoiding bit transition, and then improves the acquisition sensitivity of the GPS receivers.The simulation results show that the acquisition sensitivity has been improved, and the algorithm can acquire the weak signal with Carrier-to-Noise Ratio (CNR) as low as26dB·Hz.
Coherent integration; Bit sign transition; Non-coherent integration; High sensitivity
2017-03-15;
:2017-04-20
:國家自然科學基金(61471021)
:程燕(1987-),女,博士生,主要從事衛星導航方面的研究。E-mail:chengyan178@163.com
10.19306/j.cnki.2095-8110.2017.05.016
TP391
:A
:2095-8110(2017)05-0094-06
猜你喜歡
幼兒園(2021年6期)2021-07-28 07:42:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學生導刊(2017年13期)2017-06-15 20:29:38
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
哈爾濱師范大學自然科學學報(2015年1期)2015-04-19 06:55:26
天津科技大學學報(2015年4期)2015-04-16 04:55:11