角加速度計在飛行器/水下航行器制導控制系統中的應用
2017-09-20 06:01:34,,
導航定位與授時 2017年5期
關鍵詞:設計
, ,
(1.北京機電工程研究所,北京 100074;2.北京自動化控制設備研究所,北京 100074)
角加速度計在飛行器/水下航行器制導控制系統中的應用
陳峣1,全勝1,鄧繼權2
(1.北京機電工程研究所,北京100074;2.北京自動化控制設備研究所,北京100074)
介紹了角加速度計在飛行器/水下航行器制導控制的三個領域:制導控制一體化設計、抗未知瞬發干擾穩定控制、動力學系數辨識中的應用機理。角加速度計作為一種測量用傳感器,能夠在飛行器/水下航行器運動過程中直接采集俯仰、航向和滾動三個通道的飛行器/航行器本體的角加速度信息。通過對角加速度信息的獲取及處理,分析飛行器/水下航行器質心運動與姿態運動的內在聯系,同時將角加速度信息與慣性導航轉置所采集的信息相互結合,便可以使得系統的動力學系數辨識和制導控制一體化設計成為可能;同時,由于角加速度信息在相位上超前于角速度反饋,因此引入角加速度信息的反饋可以提升飛行器/水下航行器抗未知瞬發干擾的能力。
角加速度計;制導控制一體化;穩定控制;動力學系數辨識
0 引言
角加速度是角位移對時間的二次微分,也可以是角速度對時間的一次微分。角加速度計是一種測量角加速度的慣性傳感器,它在汽車、航空航天、電子等領域具有廣泛的應用。在慣性傳感器中,與角加速度計相比,線加速度計和角速度陀螺得到人們更大的關注。然而角加速度計的用途也十分廣泛,具有線加速度計和陀螺不可替代的作用[1]。
在角加速度計(以下簡稱角加)所測量飛行器/水下航行器滾動通道、航向通道、俯仰通道的彈體角加速度信息中,航向通道、俯仰通道彈體角加速度信息還分別包含了彈體航向過載、俯仰過載的微分信息。在水平飛行/航行的狀態下,彈體航向過載、俯仰過載微分與角加速度的關系可近似為
(1)
(2)
式(1)、式(2)描述了飛行器/水下航行器航向通道、俯仰通道質心運動與姿態運動的內在聯系,使得航向通道、俯仰通道質心控制、姿態控制一體化設計成為可能。
引入角加速度反饋,也就是引入了干擾力矩反饋,在相位上90°超前于現有的角速度反饋。因此,飛行器/水下航行器滾動穩定控制引入角加速度反饋后,將提升抗未知瞬發干擾能力。
綜合慣導、角加觀測信息,可獲得飛行器/水下航行器六自由度的全部一階、二階狀態分量,即質心速度與線加速度、繞質心角速度與角加速度。據此,可以在線、離線辨識出飛行器/水下航行器動力學參數。
下面將逐一介紹角加在制導控制一體化設計、抗未知瞬發干擾穩定控制、動力學系數辨識中的應用機理。
1 角加速度計在制導控制一體化設計中的應用
傳統的飛行器/水下航行器制導與控制系統設計是將制導回路和控制回路分開設計的[2]。由于制導律的設計只考慮中制導質心運動、末制導彈目相對運動關系,控制系統的設計只考慮彈體動力學方程,沒有考慮制導回路和控制回路動力學之間的聯系,導致制導與控制缺乏有機協調與匹配,同時飛行器/水下航行器的機動能力也得不到充分的發揮。制導控制一體化方法將傳統的制導回路和控制回路作為一個整體來研究,同時利用飛行器/水下航行器所有可測量狀態信息,能更好地發揮飛行器/水下航行器的機動能力,獲得更優異的制導性能。
本文在文獻[3]、文獻[4]中提出的二階非線性滑模面函數基礎上,提出了一種高階(三階、四階)非線性滑模面函數,來實現基于角加速度信息反饋的制導控制一體化設計。
三階滑模面函數的一般表達式為
(3)
四階滑模面函數的一般表達式
(4)
下面將依據四階滑模面函數設計飛行器/水下航行器中制導控制一體化控制律,依據三階滑模面函數設計末制導階段制導控制一體化控制律。
1.1 飛行器/水下航行器制導控制一體化控制律
本節以某水下超空泡航行器[5-6]的深度控制為例,介紹角加在中制導控制一體化設計中的應用。

(5)

Δ為死區寬度。
開關控制量為
(6)
其中,du為常值開關量控制量;k1、k2、k3、k4為控制參數;ε為正的小常數,根據實際設計經驗,一般取做0.02。
舵控電壓為
u=us+kp·e+kα·α
(7)
其中,kp、kα為控制參數,α=ωzb/(s+a4),ωzb為彈體俯仰角速度,s為拉氏算子,1/a4為縱向機動時間常數。
上述一體化控制設計以及現有的深度控制與姿態控制分立設計的某水下超空泡航行器的數學仿真對比如圖1所示。相對于采用PID控制方法的分立控制設計下的深度(紅色曲線),采用滑膜控制方法(SVC)設計的一體化控制下的深度(藍色曲線)更快、近似無超調地過渡到定深值。
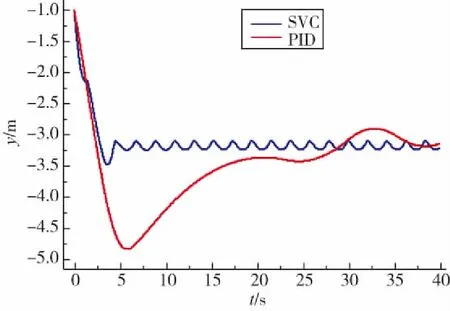
圖1 一體化控制(藍線)與獨立控制(紅線)下的航行器深度變化曲線Fig.1 Integration/Independant control curve of the craft’s depth variation
1.2 飛行器/水下航行器末制導控制一體化控制律
仍然以某水下超空泡航行器航向導引控制為例[7-8],介紹角加在末制導段制導控制一體化設計中的應用。

(8)
同樣對s作死區處理:
開關控制量為
(9)
其中,du為常值開關量控制量;k1、k2、k3為控制參數;ε為正小常數,依據實際設計經驗,一般取0.02。
舵控電壓為
u=us+kp·e+kβ·β
(10)
其中,kp、kβ為控制參數,β=ωyb/(s+b4),ωyb為彈體航向角速度,s為拉氏算子,1/b4為航向機動時間常數。

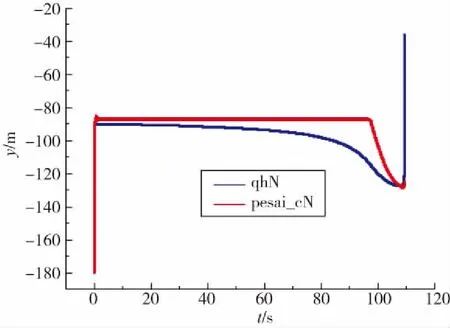
圖2 末制導控制下的彈道偏角(紅線)、彈目線方位角(藍線)Fig.2 Trajectory deflection angle and azimuth of bullet line of terminal guidance control
單獨觀察末端制導曲線,如圖3所示。
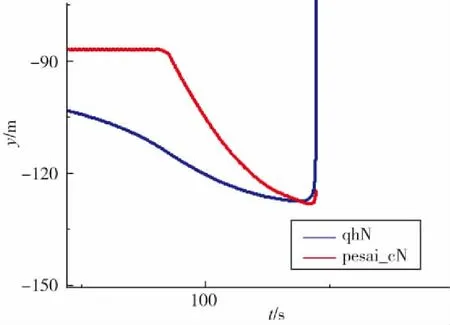
圖3 末段的彈道偏角(紅線)、彈目線方位角(藍線)Fig.3 Trajectory deflection angle and azimuth of bullet line of terminal
一體化導引控制下的航行器速度軸快速轉向、接近彈目線,在到達目標前追上彈目線,實現了較小的末制導偏差。
2 角加速度計在穩定控制中的應用
飛行器/水下航行器的滾動通道易受航向通道、俯仰通道交聯耦合干擾[9]。常規的滾動角PID控制通過滾動角速度反饋來感知滾動姿態變化趨勢,因此滯后于干擾力矩90°相位。引入滾動角加速度后,直接感知干擾力矩。下面介紹角加在抗干擾穩定控制中的應用。

(11)
對s作死區處理:
開關控制量為
(12)
其中,du為常值開關量控制量;k1、k2、k3為控制參數;ε為小正常數,一般取0.02。
舵控電壓為
u=us+kp·e
(13)
其中,kp為控制參數。
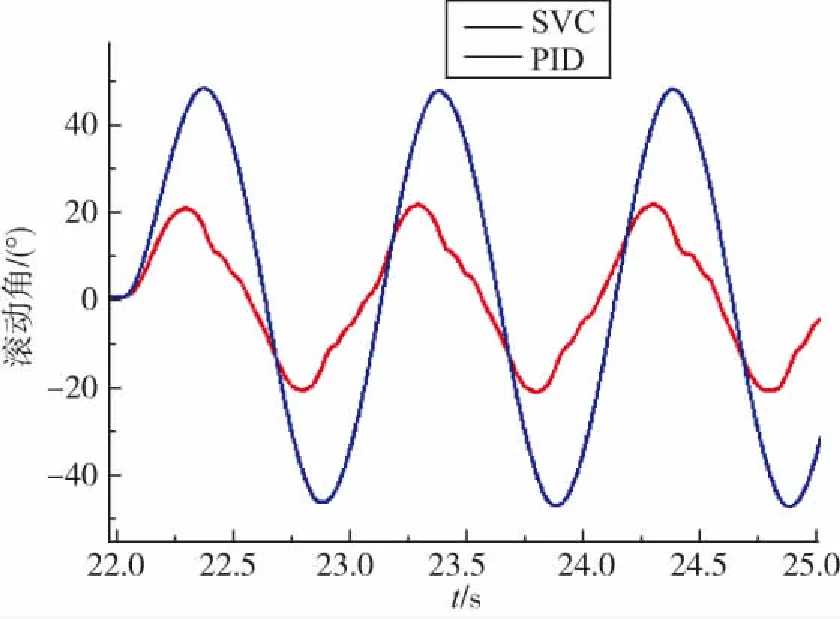
圖4 兩種穩定控制下的滾動角曲線Fig.4 Curve of roll angle of two stability control methods
引入角加穩定控制與常規PID穩定控制的抗瞬發正弦變化干擾仿真對比如圖4所示。其中,紅色曲線為引入了角加穩定控制的滾動角曲線,藍色曲線為常規的PID穩定控制的滾動角曲線。相對采用PID方法設計的穩定控制,采用滑膜控制方法(SVC)設計的角加穩定控制下的滾動角誤差幅值減小一半。
3 角加速度計在飛行器/水下航行器動力學系數辨識中的應用
一般而言,飛行器/水下航行器三通道小擾動動力學方程組為[10]:
俯仰通道:
a1·ωzb+a2·α+a3·δz=Mzb
(14)
航向通道:
b1·ωyb+b2·β+b3·δy=Myb
(15)
滾動通道:
c1·ωxb+c2·β+c3·δx=Mxb
(16)

對一般的未采用角加的系統來說,由于無法得到精確的角加速度的數值,因此上述3個方程的右側均為未知量,無法通過求解方程組的形式,對系統的動力學系數進行辨識;即使通過角速度微分求得了角加速度信息(一般稱之為“軟角加”),也往往存在很大的計算誤差而使得結算得出的系統的動力學辨識系數帶有很大的偏差。
然后利用遞推最小二乘參數辨識法,可以在線辨識出動力學系數;利用極大似然參數辨識法,可以離線辨識出動力學系數。
4 結論
本文介紹了角加在飛行器/水下航行器制導控制一體化設計、抗未知瞬發干擾穩定控制、動力學系數辨識中的應用機理。通過構建更高階的滑膜面函數(包含角加速度信息),使得飛行器/水下航行器中制導段和末制導段的制導控制一體化設計成為可能,通過仿真也驗證了這種設計的優越性;其中,通過引入超前于角速度反饋相位90°的角加速度信息,系統具有了更加優越的抵抗未知瞬發干擾的能力;最后,引入角加速度信息的反饋,使得在線/離線辨識飛行器的動力學參數成為可能。可以預見的是,隨著飛行器/水下航行器制導控制系統技術的發展,角加應用將得到推廣、深化。
[1] 吳校生,陳文元.角加速度計發展綜述[J].中國慣性技術學報, 2007,15(4):458-463.
[2] 孟秀云.導彈制導與控制系統原理[M].北京: 北京理工大學出版社, 2003.
[3] 卿立.一種變結構控制方案自動駕駛儀的研究[J].戰術導彈控制技術, 2001(2): 7-11.
[4] 劉金琨,孫富春.滑膜變結構控制理論及其算法研究和進展[J].控制理論與應用.2007,24(3):407-418.
[5] Recchi S, Hensler G.The refill of superbable cavities[J].Journal of Astronomy and Astrophysics, 2008,2(6):53-58.
[6] Lee Q, Xue L, He Y.Experimental study of ventilated supercavities with a dynamic pitching model[J].Journal of Hydrodynamics, 2008,20(4):456-460.
[7] Zou W, Liu H.Control of the ventilated supercavity on the maneuvering trajectory[J].Journal of Ocean Engineering, 2015,101(1):235-243.
[8] Liu M, An W, An H.Dynamic reliability analysis of supercavity vehicle with stochastic parameters under impact loads[J].Journal of Harbin Institute of Technology, 2012,19(3):111-113.
[9] 陳海濤,沈歡.基于輔助決策方法的低空飛行器干擾技術[J].科技通報,2012,28(6):119-121.
[10] 方振平.飛機飛行動力學[M].北京: 北京航空航天大學出版社, 2005.
TheApplicationofAngularAccelerometerintheGuidanceandControlSystemofAirVehicle/UnderwaterVehicle
CHENYao1,QUANSheng1,DENGJi-quan2
(1.BeijingMechanicalandElectricalEngineeringResearchInstitute,Beijing100074,China;2.BeijingInstituteofAutomaticControlEquipment,Beijing100074,China)
This article introduces the application of the angular accelerometer in the guidance and control system of air/underwater vehicle in three aspects: guidance and control integration, resistance to unknown and instant interference and dynamic coefficient identification.As a measuring sensor, angular accelerometer can directly collect the angular acceleration of pitch, yaw and roll channels of the air/underwater vehicle during the motion.It is possible to identify the dynamic coefficient and design the guidance and control integration system by gathering and disposing the information of the angular accelerometer and analyzing internal relationship between centroid motion and attitude motion of the air/underwater vehicle.Meanwhile, because the angular acceleration is leading the angular velocity on phase, it is possible to enhance the ability of the system to resist to the unknown instant interference by introducing the information of the angular accelerometer.
Angular accelerometer; Guidance and control integration; Stability control; Dynamic coefficient identification
2017-04-22;
:2017-06-20
:國家自然科學基金創新研究群體項目(61021002)
:陳峣(1986-),男,碩士,工程師,主要從事導航制導與控制系統方面的研究。E-mail:chenyao0001@126.com
10.19306/j.cnki.2095-8110.2017.05.010
TP273
:A
:2095-8110(2017)05-0060-05
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04