新型海流能發電控制系統設計
2017-09-16 04:16:00王世明楊志乾楊倩雯李思超
海洋技術學報 2017年4期
王世明,楊志乾,楊倩雯,田 卡,李思超
(上海海洋大學 工程學院,上海 201306)
新型海流能發電控制系統設計
王世明,楊志乾,楊倩雯,田 卡,李思超
(上海海洋大學 工程學院,上海 201306)
新型海流能發電裝置控制系統是基于MPPT理論,增加了最大功率捕獲控制及直流電路穩壓控制,通過數學模型模擬海流速度及發電機電磁力矩,并在Matlab/Simulink環境下進行系統的搭建和仿真研究。其結果表明在實際輸出功率對最大功率的比值基本相同,該系統實現對最大功率捕獲,并在直流母線后端電壓基本穩定,驗證控制系統設計的有效性。通過搭建試驗平臺,對該發電系統進行試驗研究。記錄數據擬合曲線與理論公式曲線一致,且實現電壓也在合理的波動范圍,試驗結果證明該控制系統正確,可進一步示范應用。
海流能;控制系統;穩壓控制;最大功率捕獲
海流能是指海水流動的動能,主要是指海底水道和海峽中較為穩定的流動以及由于潮汐導致的有規律的海水流動所產生的能量。其特點:往復性強、能量易捕獲。水平軸槳葉式海流能發電系統是一個復雜的非線性、多變量、強干擾系統[1]。如何獲取更多的往復來流能量是近年來研究的重要問題[2]。
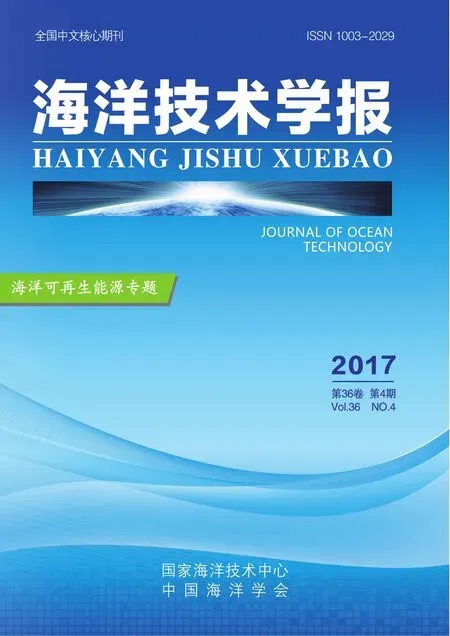
本文以一種新型的雙向直驅式發電裝置(圖1)為研究對象,結合應用于風力發電系統的MPPT控制原理,設計了以DSP28335芯片為主的控制核心,整個系統內主要包括DSP28335控制模塊、功率器件模塊、轉速采集模塊、驅動電路、通訊模塊、人機交互模塊等部分,其最終目的是能夠捕獲最大功率,實現交直流負載輸入穩定電壓。
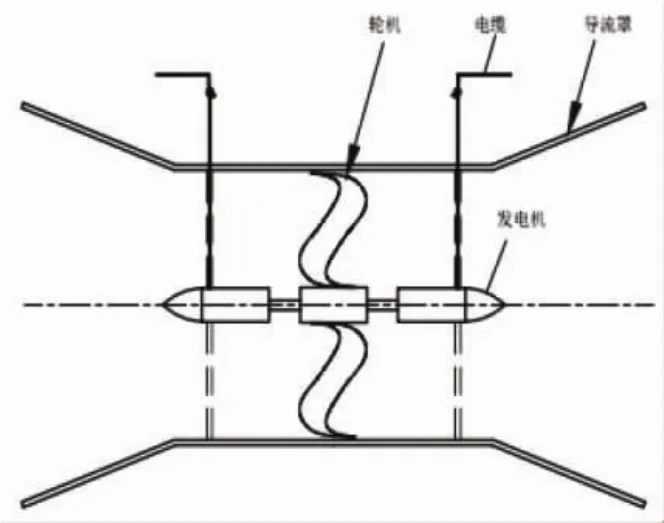
圖1 雙向直驅式發電裝置示意圖
1 系統總體設計
整個新型裝置發電系統包括葉輪、永磁同步發電機、全控整流單元、Boost型升壓單元、DSP控制板、蓄電池充放控制單元、逆變單元、負載。系統結構如圖2所示。
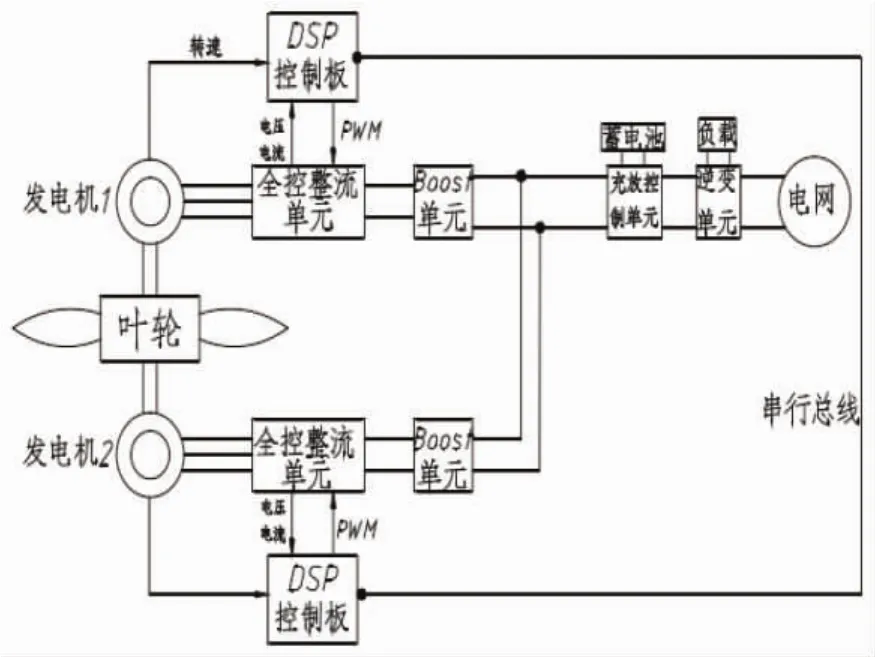
圖2 發電系統結構
新型裝置發電系統的工作原理:
葉輪獲取海流能量并直接傳遞給兩臺永磁同步發電機,發出交流電經過兩個三相全控橋式整流單元及Boost型單向DC/DC變換器升壓至所需直流電,并在直流母線上并聯,并通過儲能單元及配套DC/DC變換器來穩定直流母線。然后通過單相逆變器和DC/DC變換器分別向交流負荷和直流負荷供電,也可并網運行。此過程葉輪與電機之間采用一級傳動,其比多級傳動減少能量損耗,但發電機輸出數據比較波動較大,增加控制難度。
根據上述發電系統的工作原理以及要實現的基本功能,因此在控制系統設計時,采用最大功率Pmax給定法及恒壓控制法(CVT)[3]。控制系統內部包括DSP28335控制模塊、功率器件模塊、轉速采集模塊、驅動電路、通訊模塊、人機交互模塊等部分,滿足整個控制系統的需要。
最大功率Pmax給定法的機理是根據發電機內部嵌入的霍爾傳感器[4]每分鐘傳出的脈寬數量計算出轉速ωopt來推測水輪機的最佳尖速比λopt,又在不同流速的情況下,最大功率Pmax與轉速ωopt呈三次方曲線關系。故將最大功率作為給定值,然后與實際輸出測算功率比較,根據誤差值的大小決定運用PID控制算法進行調節,產生PWM信號調節全控整流單元,進而使實際功率盡可能接近最大功率實現追蹤。其控制框圖如圖3所示。
圖3 最大功率給定法控制框圖
最大功率Pmax與λopt關系[5]:
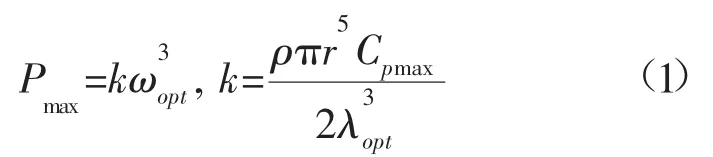
式中:ρ為海水密度;Cpmax為最大海流能捕獲系數;r為葉輪半徑;ωopt為葉輪轉速。
該恒壓控制法(CVT)的機理與太陽能恒壓控制方法不同,該機理是在以鋰電池為儲能單元的電路中加入全數字DC/DC雙向變換器,實現對直流母線兩端電壓VC控制。當VC低于經驗電壓設定區間下限,數字PID控制算法進行調節產生PWM信號改變DC/DC變換器方向,儲能單元放電;當VC高于經驗電壓設定區間上限,同理儲能單元充電。此控制方法既不造成能量浪費,又實現母線電壓穩定。控制圖框如圖4所示。
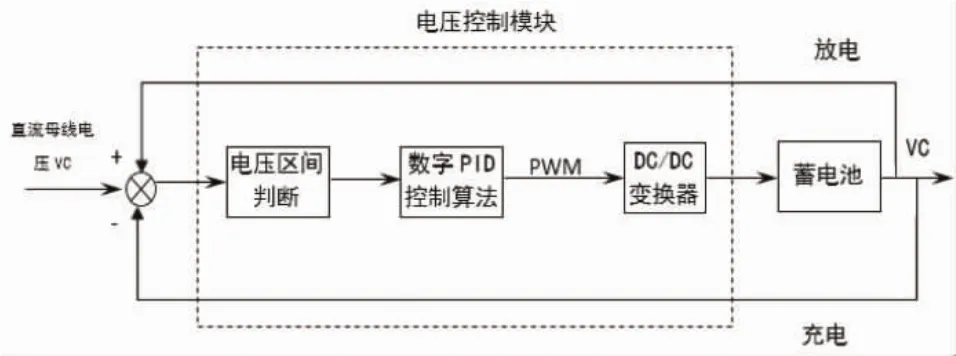
圖4 CVT控制法控制框圖
2 仿真研究
建立以海水流速為仿真系統的輸入信號,海流的變化規律較易尋找,且能量變化比較平穩。綜合考慮風、波浪、海水深度等海洋環境因素的影響,海水流速的數學模型[6]公式(2)如下:
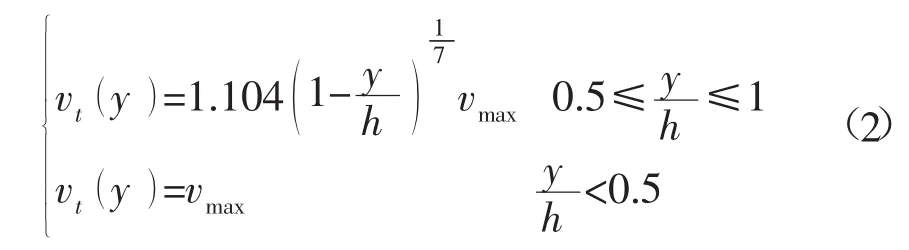
式中:h為海水深度;y為該點距海平面的距離;υmax為最大海流速度。由波浪引起的流速由式(3)表示:

式中:k為波數;ωw為波浪的循環頻率;ηa為波高;t為時間。
葉輪傳動主軸僅是一級傳動,可忽略主軸摩擦力及葉輪軸系上的粘性阻力系數產生的阻力矩,其簡化力矩平衡方程為:

葉輪主軸機械力矩[7]為:

將上述數學模型得到的發電機電磁力矩作為系統發電機輸入[8],按照圖5所示的仿真原理圖搭載DSP控制模塊、逆變模塊及調用Simulink內的其他模塊搭建仿真系統。設定仿真時間10 s,得到仿真系統內部相應的工作狀態。
根據上述仿真系統分析得到圖6(a)和圖6(b)分別為功率捕獲系數CP仿真曲線及直流母線后端電壓仿真曲線。從圖6(a)中可以看出,功率捕獲系數Cp一直在CPmax=0.27附近上下波動,說明實際輸出功率與給定的最大功率比值基本不變,則該控制系統實現了對最大功率點的捕獲。從圖6(b)中看出,直流母線后端電壓維持在[210,220]區間內,完成了穩壓的設計要求。
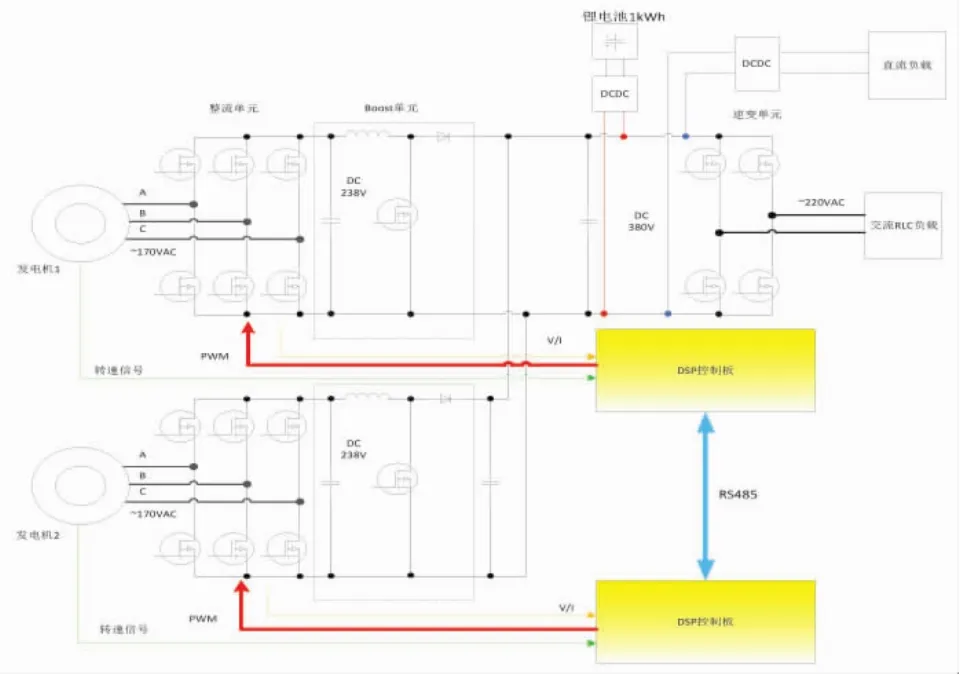
圖5 仿真原理圖
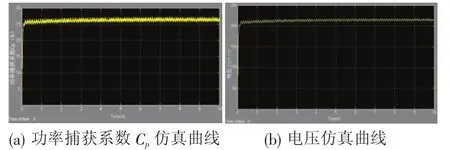
圖6 仿真曲線圖
3 試驗研究
3.1 試驗方案
本試驗采用3 kW異步電動機、ABB變頻器及傳動比為12:1的減速器、轉速轉矩傳感器組成發電機動力輸入源,代替葉輪。轉速可以控制在0~120 r/min之間。配合自行設計的電能控制箱組成整個測試系統。

圖7 測試系統與控制電路
3.2 試驗結論
試驗采用動力源輸入代替葉輪的方法并不影響對最大功率的跟蹤,只需驗證發電機轉速與輸入發電機功率的數據記錄數據滿足公式(1)的關系,即表明該控制系統滿足對最大功率捕獲。表1為試驗采集6組數據,擬合數據繪制如圖8所示圖形,數據與理論公式基本一致,證明該設計合理。
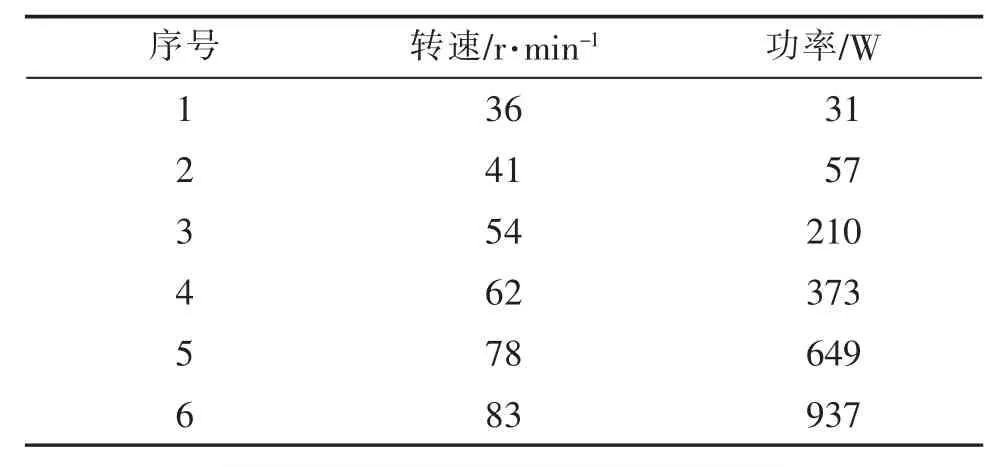
表1 轉速與功率數據
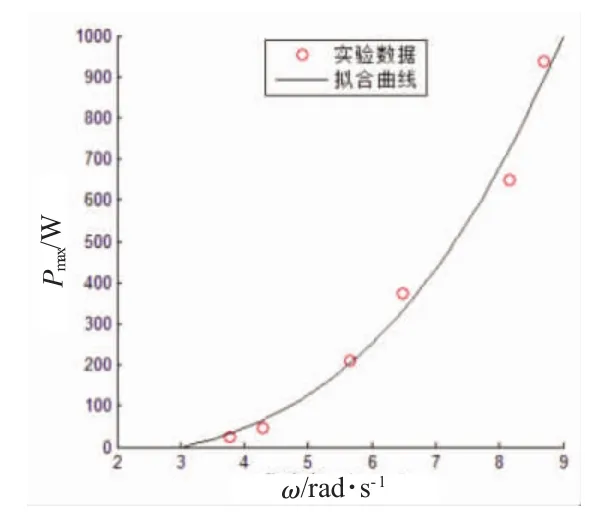
圖8 擬合試驗結果
圖9 為人機交互軟件內存儲的母線端電壓數據生成的10 s曲線圖,從圖中看出,實際數據比仿真數據波動范圍略大一些,屬于電壓合理波動范圍內,控制電路基本滿足穩壓設計初衷。
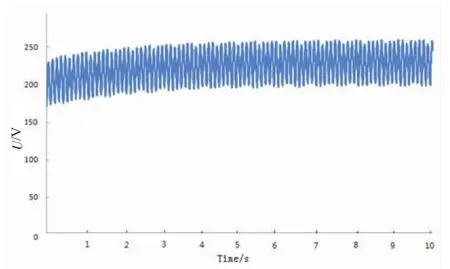
圖9 電壓實驗數據
4 結束語
本文提出的新型海流能發電裝置控制系統是基于MPPT理論,增加了最大功率捕獲控制及直流電路穩壓控制,通過數學模型模擬海流速度及發電機電磁力矩,并在Matlab/Simulink環境下進行系統的搭建和仿真研究。其結果表明在實際輸出功率對最大功率的比值基本相同,該系統實現對最大功率的捕獲,并在直流母線后端電壓基本穩定,驗證控制系統設計的有效性。通過搭建試驗平臺,對該發電系統進行試驗研究。記錄數據擬合曲線與理論公式曲線一致,且實現電壓也在合理的波動范圍,試 驗結果證明該控制系統正確,可進一步示范應用。
[1]Myers L,Bahaj AS.Simulated electrical power potential harnessed bymarine current turbine arrays in the AlderneyRace[J].Renewable Energy,2005,30(11):1713-1731.
[2]孫志峰.國內外海洋能利用技術發展現狀[C]//海口市人民政府、中國產業海外發展協會、中國海洋石油總公司.2015年深海能源大會論文集,2015:8.
[3]陳亞愛,金雍奧.風光互補發電系統控制技術綜述[J].電氣傳動,2012(01):3-9.
[4]郭清,王元昔.霍爾傳感器在直流電機轉速測量中的應用研究[J].傳感器與微系統,2011(07):54-56.
[5]馬舜,李偉,劉宏偉,等.海流能發電系統的最大功率跟蹤控制研究[J].太陽能學報,2011(04):577-582.
[6]Payne G S,Kiprakis A E,Ehsan M,et al.Efficiency and dynamic performance of digital displacement TMhydraulic transmission in tidal current energyconverters[J].Proc IMechE,Part A:Journal ofPower and Energy,2007,221(2):207-218.
[7]Lulian Munteanu,Antoneta luliana Bratcu,NicolaosAntonio Cutululis,等(著),李建林,周京華,等(譯).風力發電系統優化控制[M].北京:機械工業出版社,2010.
[8]石茂順,李偉,林勇剛,等.海流能發電系統的負載控制仿真研究[J].太陽能學報,2014(01):119-124.
Design of a Novel Power Control System for Marine Current Energy Exploitation
WANG Shi-ming,YANG Zhi-qian,YANG Qian-wen,TIAN Ka,LI Si-chao
College of Engineering,Shanghai Ocean University,Shanghai 201306,China
Based on the MPPT theory for the new control system in the marine current power generation device, this paper has strengthened the maximum power capture control and voltage-stabilizing control in a DC circuit. Using the mathematical model,this paper simulates the current velocity and the electromagnetic torque of the generator,and conducts research and building of the system in the Matlab/Simulink environment.The results show that the ratio between actual output power and maximum power is basically the same,the system has achieved maximum power capture,and the DC bus back-end voltage is basically stable,which verifies the effectiveness of the control system design.Through the construction of the testing platform,the power generation system has gone through experimental research.The data fitting curve is consistent with the theoretical formula curve,and the voltage is also within reasonable fluctuation range.The testing results prove that the control system is correct and can be further applied.
marine current energy;control system;voltage-stabilizing control;maximum power capture
P74
A
1003-2029(2017)04-0053-04
10.3969/j.issn.1003-2029.2017.04.010
2017-02-09
海洋可再生能源專項基金資助項目(SHME2013JS01);上海市2014年優秀技術帶頭人計劃資助項目(14XD1424300);上海市經濟和信息化委員會軍民結合專項資助“大型海洋自供電觀測浮標產業化示范推廣”
王世明(1964-),男,博士生導師,教授,主要從事海洋可再生能源以及裝備智能控制技術研究。E-mail:smwang@shou.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30