MEMS電容式陀螺儀的設計
2017-09-08 06:54:11張瓊
電子技術與軟件工程 2017年14期
文/張瓊
MEMS電容式陀螺儀的設計
文/張瓊
本文設計了一種靜電梳齒驅動、差分電容檢測的MEMS陀螺儀,結構采用雙質(zhì)量塊對稱設計,能夠有效抑制軸向加速度的干擾。利用Ansys對MEMS陀螺儀進行了仿真分析,在模態(tài)仿真中分析了陀螺結構的固有頻率與振型;在靜態(tài)仿真中,分析了陀螺結構在X方向、Y方向及Z方向受到50G沖擊載荷時的應力分布情況,保證了彈性梁等危險區(qū)域可以承受一定的沖擊載荷。
MEMS陀螺儀 Ansys仿真 結構設計
1 引言
陀螺儀是測量角速度的慣性器件,由微電子機械系統(tǒng)(MEMS)技術所加工的微機械陀螺儀在體積、重量和功耗上的優(yōu)勢,使其能在許多應用領域可以有廣泛的應用。多年來,隨著MEMS技術的發(fā)展,理論上的一系列研究及加工技術的進步,MEMS陀螺儀取得了更好的進展。本文設計了一種靜電梳齒驅動、差分電容檢測的MEMS陀螺儀,結構采用雙質(zhì)量塊對稱設計,能夠有效抑制軸向加速度的干擾。
2 結構設計
本文所設計的MEMS陀螺儀結構示意圖如圖1所示,x軸為驅動方向、y軸為檢測方向,結構采用雙質(zhì)量塊對稱設計,靜電梳齒驅動,圖1中1、4、7部分為左、右驅動器及中間驅動器,在固定梳齒的驅動下,可動梳齒受到周期性的作用力,從而使質(zhì)量塊1、質(zhì)量塊2在作周期性的受迫振動,其振動位移與驅動量成正比,使陀螺儀可以有較好的線性度。
當MEMS陀螺儀處于正常的工作狀態(tài)時,驅動質(zhì)量塊1與質(zhì)量塊2在靜電梳齒的驅動下沿水平X方向做相對運動,當有Z方向角速度 輸入時,兩檢測質(zhì)量塊1、2在哥氏力的作用下沿Y方向做反方向振動,檢測電容C1、C2改變,C1、C2變化量大小相同、方向相反,并與角速度信號成正比。因此通過檢測電容C1、C2的變化量,就可以得到Z方向輸入的角速度 。
對于單質(zhì)量塊陀螺儀,軸向加速度會對其工作帶來嚴重的干擾,本文所設計的MEMS陀螺儀對于軸向加速度可以很好的抑制。
當陀螺儀工作時,兩個質(zhì)量塊在固定梳齒的激勵下相對運動,質(zhì)量塊1和質(zhì)量塊2的運動方程為:
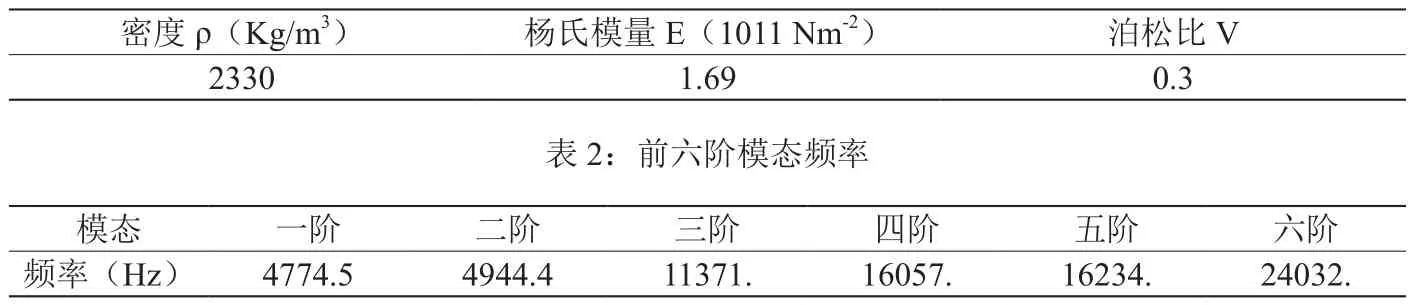
表1:單晶硅的材料參數(shù)

當陀螺儀受到X方向的加速度時,兩個質(zhì)量塊在其作用下,運動方程為:

當系統(tǒng)有角速度Ω輸入時,哥氏力大小為:

因此在兩個檢測質(zhì)量塊上耦合的加速度為:

由式(6)和(7)可以看出,兩個檢測質(zhì)量塊受到的加速度分為兩部分,第一部分為設計所需要的部分,它們在兩個式(4)和(5)中的相位相反;第二部分為系統(tǒng)加速度引起的干擾項,它們在方程中的幅值、相位相同。由于差分檢測電容反相位信號會相疊加,同相位信號相互抵消,可以抑制X方向的加速度干擾信號。
當陀螺儀受到Y方向(或Z方向)的加速度時,由圖1的結構可以看出,C1、C2同時增大或減小相同的值,差分檢測電容使輸出不受加速度信號的影響。
由以上分析可知,MEMS電容式陀螺儀能夠很好的抑制軸向加速度的干擾。
3 仿真分析
3.1 模態(tài)仿真分析
Ansys模態(tài)仿真分析可以確定MEMS 陀螺儀的模態(tài)參數(shù)。MEMS 陀螺儀仿真所用的材料屬性設定如表1所示。
運用Ansys15.0對MEMS 陀螺儀進行了六階模態(tài)分析,得到前六階模態(tài)頻率如表2所示。
圖2為MEMS 陀螺儀的一階驅動模態(tài),圖3為二階檢測模態(tài),兩工作模態(tài)頻率相差169.9Hz,可以滿足陀螺對頻率匹配要求,前兩階工作振型頻率高于2000Hz ,可以使陀螺不容易受到環(huán)境噪聲(< 2000Hz )的干擾。
3.2 靜態(tài)仿真分析
Ansys靜態(tài)仿真是用于分析陀螺儀在靜力載荷作用下應力情況,保證彈性梁等危險結構可以承受一定的沖擊載荷。仿真時在結構的X方向施加50G的載荷時,其應力分布云圖如圖4所示,其最大應力為7.13 MPa,危險區(qū)域為驅動梁的末端;在結構的Y方向施加50G的載荷時,其應力分布云圖如圖5所示,其最大應力為6.64 MPa,危險區(qū)域為檢查梁的末端及轉折部分;在結構的Z方向施加50G的載荷時,其應力分布云圖如圖6所示,其最大應力為1.74 MPa,危險區(qū)域為驅動梁的轉折部分,各個方向的最大應力都遠遠小于硅的許用應力。
通過以上分析可以得到,本文所設計的MEMS陀螺儀可以承受一定的沖擊。
4 總結
本文設計了一種靜電梳齒驅動、差分電容檢測的MEMS陀螺儀,結構采用雙質(zhì)量塊對稱設計,采用x軸方向驅動、y軸方向檢測的工作方式,能夠有效抑制軸向加速度的干擾。利用Ansys對MEMS陀螺儀進行了模態(tài)與靜態(tài)仿真分析,驗證了MEMS陀螺儀設計的合理性。
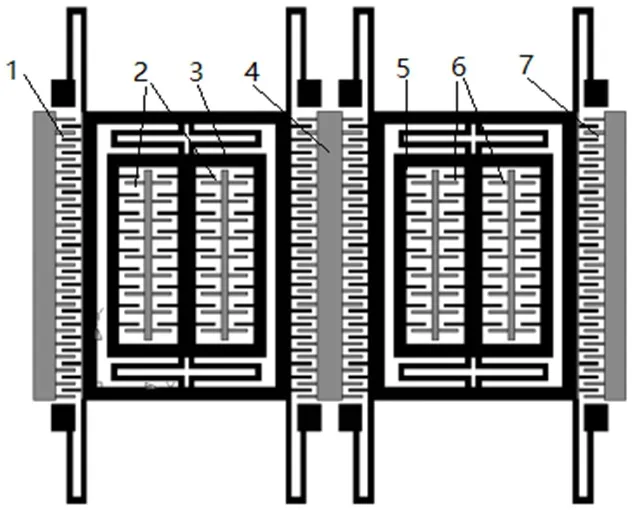
圖1:MEMS電容式陀螺儀結構示意圖
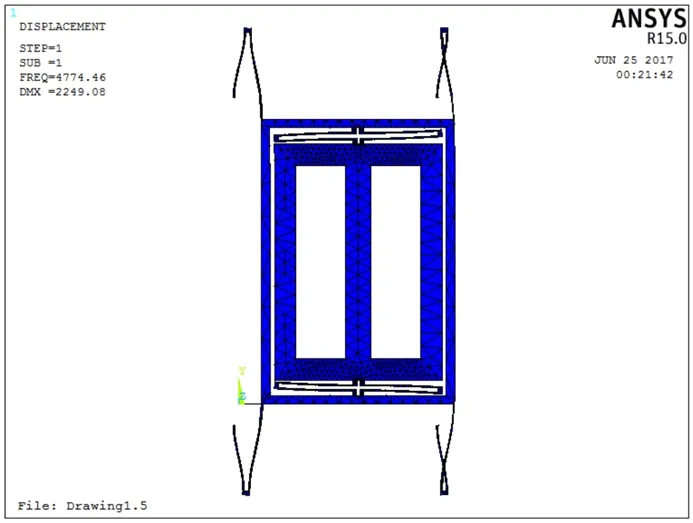
圖2:陀螺結構的第一階模態(tài)云圖

圖3:陀螺結構的第二階模態(tài)云圖

圖4:X方向施加50G載荷時結構的應力分布云圖

圖5:Y方向施加50G載荷時結構的應力分布云圖
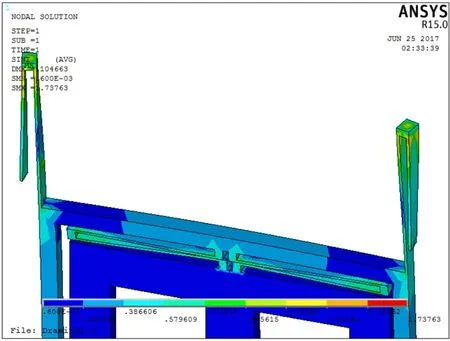
圖6:Z方向施加50G載荷時結構的應力分布云圖
[1]Said Emre Alper,Tayfun Akin*. Symmetrical and decoupled nickel Microgyroscope on insulating substrate[J].Sensors and Actuators AIIS,2004:336-350.
[2]Said Emre Alper*,Kanber Mithat Silay, Tayfun Akin.A LOW cost rate grade nickel Microgyroscope[J].Sensors and Actuators A132,2006:171-181.
[3]許昕,何杰等.微機械陀螺儀的新進展及發(fā)展趨勢[J].壓電與聲光,2014,36(04):588-595.
[4]馬宗敏.單芯片集成雙慣性器件研究[D].太原:中北大學,2008.
[5]熊斌.柵結構微機械振動式陀螺儀[D].江蘇:東南大學,2001.
[6]管繼平.梳狀音叉雙線振動硅微機械陀螺儀的技術研究[D].電子科技大學,2011.
[7]譚秋林,石云波等.具有柵結構與靜電梳齒驅動的電容式微機械陀螺的仿真、設計與測試[J].納米技術與精密工程,2011,09(03):207-211.
[8]朱一綸,王壽容,裘安萍.微機械諧振陀螺的有限元分析[J].東南大學學報,2004,34(01):38-41.
作者單位 忻州師范學院 山西省忻州市 034000
張瓊(1983-),女,山西省忻州市人。碩士學位。主要研究方向為電子技術,傳感技術。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
哲學評論(2021年2期)2021-08-22 01:53:34
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
