基于差異性測度的遙感自適應分類器選擇
2017-09-08 06:54:08李光麗王瑋哲姚樂樂李霖馬天舒
電子技術與軟件工程 2017年14期
文/李光麗 王瑋哲 姚樂樂 李霖 馬天舒
基于差異性測度的遙感自適應分類器選擇
文/李光麗 王瑋哲 姚樂樂 李霖 馬天舒
遙感影像分類在遙感專題信息提取、動態變化監測等應用中都發揮著重要作用。現階段遙感分類器與分類方法很多,造成了遙感分類結果的差異性或多樣性,多分類器組合已成為提高遙感分類精度有效的途徑。但并非所有的分類器組合都能提高分類精度,如何選擇合適的分類器組合非常重要。通過構建基于差異性測度的啟發式搜索算法,實現分類器成員的自適應選擇,選用AVIRIS數據進行試驗,結果表明,基于差異性測度的啟發式搜索有助于選擇分類器組合,從而提高遙感分類精度。
差異性測度 遙感分類器 精度
1 引言
遙感影像分類就是對地球表面及其環境在遙感圖像上的信息進行識別和分類,從而達到識別圖像信息所對應的實際地物,提取所需地物信息的目的。對于特定的遙感影像土地覆蓋分類,常用的遙感分類器包括最大似然分類器,最小距離分類器,馬氏距離分類器,平行六面體分類器,支持向量機分類器和神經網絡分類器等。但是,每一種遙感分類器都有其自身的優勢和局限性,其精度和適用范圍也有一定限度。多分類器系統指的是利用多個分類器進行分類,然后通過一定的組合機制把多個分類器的結果進行融合,達到對目標進行識別的目的。一個好的多分類器系統不僅取決于組合規則,而且取決于分類器成員選擇的好壞。因而希望找到一種方法來度量多分類器系統中成員分類器之間的關系,用于預測它們之間相互結合的能力,并且通過這種預測能力對多分類器系統的設計進行指導,從而提高組合分類器用于遙感影像分類的精度。本文應用基于啟發式搜索的分類器選擇方法,通過自適應的自動搜索選擇合適的分類器組合,試驗表明,該方法對于提高遙感分類精度具有一定指導意義。
2 多分類器組合原理
多分類器組合方式最突出的優點是模型可以綜合不同分類器所得到的分類信息,避免單一分類器可能存在的片面性,以達到更好的分類效果。一般化的組合多分類器模型如圖1所示。

圖1:組合多分類器模型
如果把組合多分類器看作一個完整系統,則它由系統輸入、分類器設計、融合機制和輸出四部分組成。其中分類器的選擇非常重要,并不是所有的分類器進行組合就一定能夠提高分類精度,通常情況我們選擇那些差異性較大的分類器構成分類器集合,從而使各分類器之間達到互補的效果,最終提高組合分類精度。其次,我們還要考慮用于組合的分類器的數量,過多和過少都不一定能符合實際需求。
3 基于啟發式搜索算法的分類器集成
啟發式搜索方法在診斷、智能規劃、自動推理等人工智能領域應用廣泛。啟發式算法是指在可接受的運算時間、占用空間等開銷的前提下,給出待解決的組合優化問題的一個可行解。
啟發式搜索是在狀態空間的搜索對每一個搜索位置進行評估,得到最好的位置,再從這個位置進行搜索直到目標。啟發式搜索能夠避免盲目搜索的效率低、運算時間和空間耗費過多的缺點。在啟發式搜索中,對位置的評估函數很重要。采用不同的評估函數可以有不同的效果。評估函數的一般表達式為:
f(n)=g(n)+h(n) (1)
其中f(n)是節點n的評估函數,g(n)是狀態空間中初始節點到n節點的最短路徑長度估計,h(n) 是從n到目標節點最佳路徑的估計代價,體現了搜索的啟發信息,當選擇合適的h(n) 作為啟發因子時,可以很好的提高搜索效率。
基于差異性測度的啟發式搜索算法構建多分類器系統,步驟如下:
(1)利用劃分不同特征,不同的樣本集輸入各分類器;
(2)選用合適的差異性測度方法作為啟發式搜索的結點;

圖2:AVIRIS影像假彩色合成圖像

(a)集合{2,5,6,11,12}
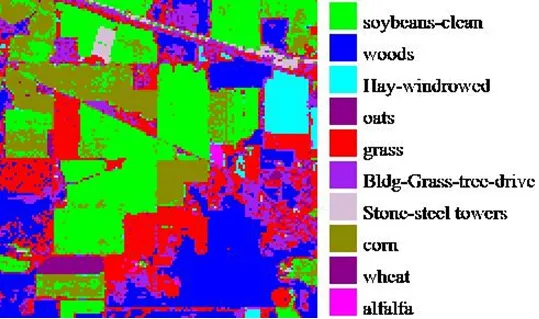
圖3:AVIRIS影像多分類器組合分類圖
(3)選擇合適的分類器組合策略進行多分類器組合;
(4)通過啟發式搜索選出最優成員分類器集合,組合后評定精度。
4 試驗結果與分析
本文中的啟發式搜索是基于DF差異性測度的,分類器組合策略為加權投票法。首先通過ENVI4.5和Weka3.6.1軟件進行單分類器分類,然后在IDL中實現基于DF的啟發式搜索。
本文使用AVIRIS數據,該數據于1992年6月12日由NASA飛機獲得的,該景影像包括拉斐特西部6英里的范圍。該數據為經過定標的數據,首先要將數據值轉換為輻射值。去掉4個壞波段后為220個波段。圖2為波段58,15,6假彩色合成圖像。
根據當地的地物特點,將該區域的土地覆蓋類型劃分為:紫花苜蓿、玉米、草、干草、燕麥、大豆、麥子、樹林、建筑物-草-樹-車道、石頭-鋼鐵-塔。選擇樣本共10410個像元,通過選擇訓練樣本進行監督分類,選用的分類器有:SVM(1)、MLC(2)、Mahal-dist(3)、Min-dist(4)、j48 DT(5)、BPNN(6)、naive bayes(7)、RBFNN(8)、SAM(9)、SID(10)、Random tree(11)、BF tree(12),括號內為分類器序號。
通過基于差異性的啟發式搜索算法選擇最優分類器集合,采用的差異性測度方法為DF,組合方法為加權投票法,最終選擇的集合為{2,5,6,11,12},組合后分類精度為96%。本試驗中搜索部分耗時10.36。同時,我們將所有其他可能的組合進行一一驗證,發現基于差異性的啟發式搜索算法提供了一組最優解。如果不進行分類器選擇,將12個分類器進行組合,其精度為90.7%。圖3為兩種組合方法分類結果圖比較。
5 結論
本文通過應用啟發式搜索算法,基于AVIRIS數據試驗,表明啟發式搜索算法,對于分類器選擇具有一定指導意義;同時研究發現,并非用于組合的分類器數據越多,分類精度越高。但是本文未考慮但分類器本身的缺陷或能力,分類器組合精度是成員分類器精度和差異性的折中,在實際分類器選擇過程中需要綜合考慮二者,但是差異性與精度的組合方式,以及二者的重要程度如何確定需要后續繼續研究。
[1]王鵬.基于多樣性度量的多分類器融合研究[D].鎮江:江蘇大學,2007.
[2]Kang HJ,Doermann D.Selection of classifiers for the construction of multiple classifier Systems[C].// Proceedings of the Eight International Conference on Document Analysis and Recognition. Seoul, Korea:IEEE Computer Society,2005:1194-1198.
[3]邢文訓,謝金星.現代優化計算方法[M].北京:清華大學出版社, 2005.
[4]王建樹.啟發式算法在服務組合中的研究與實現[D].長春:吉林大學計算機科學與技術學院,2009.
[5]Giacinto G,Roli F.Design of effective neural network ensembles for image classification processes[J]. Image Vision and Computing Journal,2001,19,699-707.
作者單位 航天恒星科技有限公司 北京市 100000
李光麗(1984-),女,山西省陽泉市人。碩士學位。現為航天恒星科技有限公司系統設計師。主要研究方向為遙感圖像處理及相關應用。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00
