基于SVPWM的變速發電恒頻/恒壓輸出控制仿真
2017-09-07 06:30:44邊浩然資新運曾繁琦陳冠宇張衛鋒
軍事交通學院學報 2017年8期
關鍵詞:發電機
邊浩然,資新運,曾繁琦,陳冠宇,張衛鋒
(1.軍事交通學院 研究生管理大隊,天津 300161; 2.軍事交通學院 軍用車輛系,天津 300161)
基于SVPWM的變速發電恒頻/恒壓輸出控制仿真
邊浩然1,資新運2,曾繁琦1,陳冠宇1,張衛鋒2
(1.軍事交通學院 研究生管理大隊,天津 300161; 2.軍事交通學院 軍用車輛系,天津 300161)
基于集成起動/發電一體化電機(integrated starter generator, ISG)的軍用混合動力車輛能利用ISG電機實現行車和駐車發電,但行車車速變化導致ISG轉速變化,系統輸出的三相交流電力電壓、頻率以及整流后的直流電壓變化,不能直接供負載使用。因此,提出基于兩電平三相電壓源逆變器的空間矢量脈寬調制(space vector pulse width modulation, SVPWM)控制方法,可根據直流側電壓變化調整控制器PWM輸出,使逆變器恒頻、恒壓輸出三相對稱交流電力。在介紹發電系統工作原理基礎上,分析SVPWM控制原理,在Simulink中搭建發電系統仿真模型。仿真結果表明,當直流側電壓變化時,逆變器實現了恒頻恒壓輸出,證明控制方法的可行性。
空間矢量脈寬調制;集成啟動/發電一體化電機;變速發電;恒頻/恒壓;Simulink
基于集成啟動/發電一體化電機 ISG 的混合動力車輛憑借怠速起停、制動能量回收優化了排放、降低了油耗。軍用混合動力車輛在此基礎上拓展了其作為小型移動電站的功用,ISG輸出的電能除供車載電子設備使用外,還可為指揮通信等設備供電,提升軍隊移動條件下的電力保障能力。
ISG發電包括行車與駐車發電,行車發電時的車速變化會導致電機輸出電壓、頻率發生變化,不能直接連接負載。常用解決方法包括發電機內和機外兩種解決思路。機內方法如使用混合勵磁發電機或雙饋異步發電系統[1-2],當發電機轉速變化時,改變機內勵磁磁場,進而控制輸出恒頻恒壓電力。機外方法包括液壓恒速控制和電力電子變流技術,液壓變速發電系統利用液壓傳動的無極調速特性,實現變速輸入、定速輸出,適用于原車上裝有液壓系統的裝備[3-4];電力電子變流技術則通過將電機輸出電力經整流、逆變實現“交—直—交”變換,輸出恒頻恒壓電力,相較于液壓系統具有效率高、輸出穩定的優點。
本方案選擇利用電力電子變流技術實現變速恒頻恒壓發電。朱詩順等[5]針對軸帶發電系統恒頻恒壓輸出做了試驗分析,但對整流逆變工作原理未做分析。趙彩虹[6]提出基于永磁同步電機的車載軸帶發電系統的弱磁控制方法,使發電機可運行于更高車速。
本文提出基于永磁同步電機的直驅式發電系統方案,介紹發電系統組成及原理,重點分析基于SVPWM的逆變理論,該方法可根據直流側電壓變化調整PWM輸出,進而控制逆變器輸出的三相交流電恒頻、恒壓輸出。并通過Simulink仿真驗證相關理論正確性,為控制器的開發提供依據。
1 發電系統控制方案
系統采取發動機與發電機同軸轉動。發電機為內轉子面貼式永磁同步發電機,發動機曲軸與ISG轉子軸剛性連接,整流器采用不可控二極管橋式整流以降低成本。逆變器為兩電平三相電壓源逆變器。發電機系統控制分為發動機控制和發電機控制兩部分:發動機轉速控制由電子控制單元完成,發電機控制由開發的電機控制器完成。行車時,發動機驅動ISG發電,由于轉速變化,導致橋式整流電路輸出的直流電壓變化,逆變器實時測量直流電壓,并根據直流電壓調整PWM輸出,控制交流側輸出始終為220 V/50 Hz的三相交流電力。
2 SVPWM控制原理
SVPWM是空間矢量脈寬調制控制方法,原理在于將三相靜止坐標下的標量控制轉換為d-q旋轉坐標系下的矢量控制,具有直流電壓利用率高、抑制諧波的優點。
2.1 空間電壓旋轉矢量
三相電壓標量到旋轉電壓矢量轉換如圖1所示。其中:uA、uB、uC分別為A、B、C相電壓值;Um為相電壓峰值;us為合成電壓。
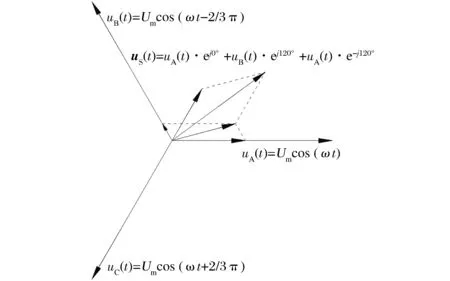
圖1 三相電壓標量到旋轉電壓矢量轉換
對于三相對稱交流電力,有:
(1)
考慮三相電壓空間分布互差120°電角度,令復平面實軸與A軸重合,將三相電壓轉換到復平面,則有:
uS(t)=uA(t)ej0°+uB(t)ej120°+uC(t)e-j120°
(2)
將式(1)帶入式(2),得
(3)
由式(3)可知,三相對稱電壓合成電壓為幅值不變,在空間以角速度逆時針旋轉的旋轉矢量[7]。
根據電壓合成原理的可逆性可知,若控制合成電壓矢量uS為幅值固定,且在空間以定速旋轉,則可得到三相對稱正弦電壓。
2.2 兩電平三相逆變器SVPWM控制
兩電平三相電壓源逆變器如圖2所示。逆變器通過3對功率開關控制三相輸出電路的導通與關斷。
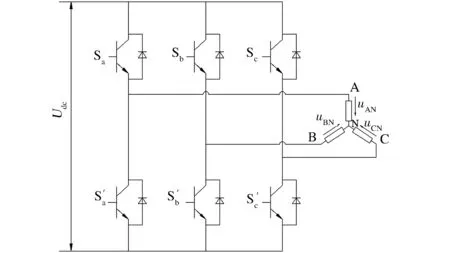
圖2 兩電平三相電壓源逆變器示意

(4)
令A相與復平面實軸重合,將式(4)帶入式(2)得
Uout1=Udcej0°
同理可以求得其他7種導通形式下的合電壓矢量Uout(如圖3所示)。
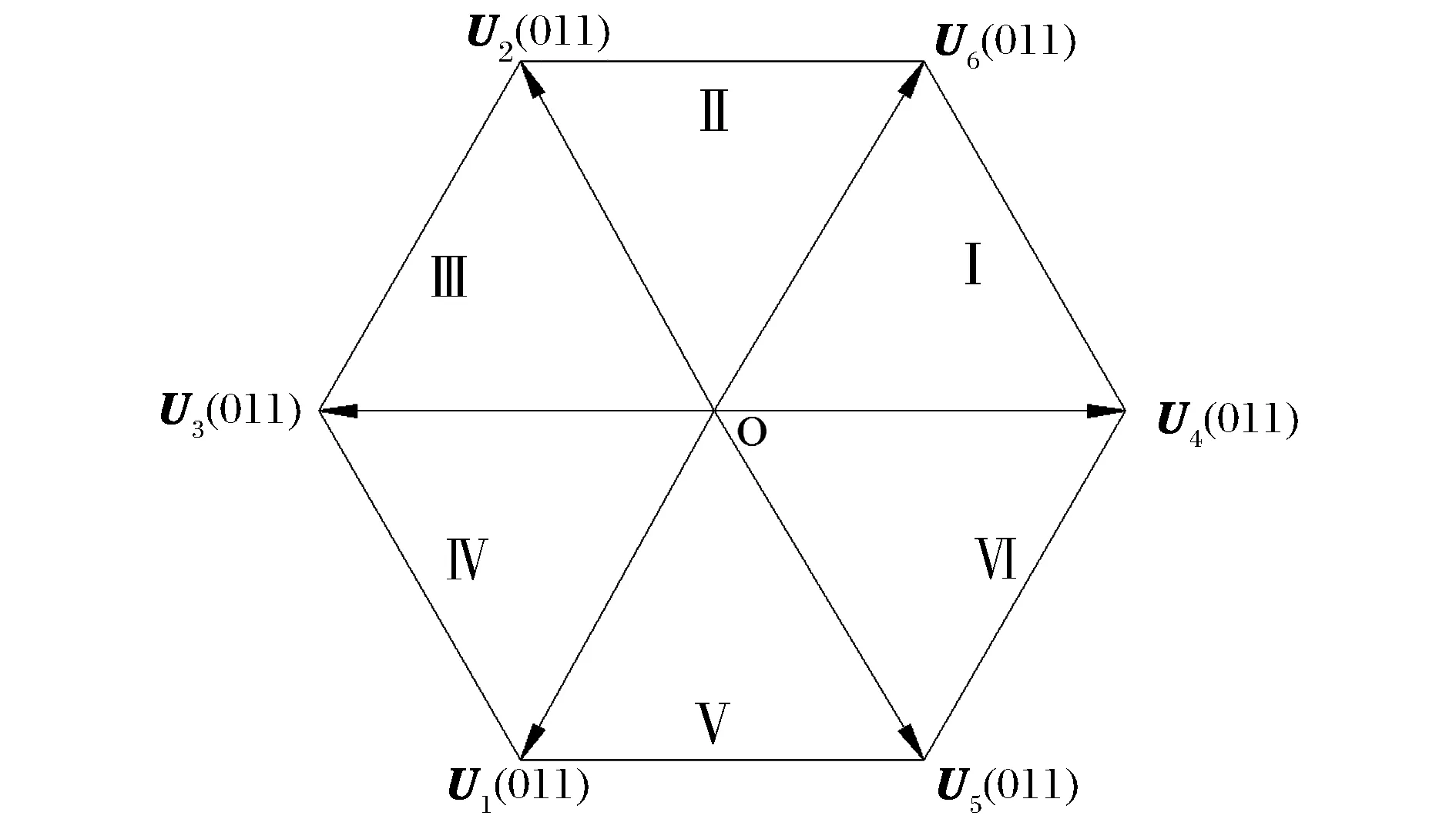
圖3 逆變器輸出電壓矢量

(5)
其中U0(000)、U7(111)為零矢量。
復平面360°被分為如圖3所示的6個扇區,根據伏秒平衡原理(或平均值等效原理),合電壓矢量在任一扇區時,可由組成該扇區的兩個非零電壓矢量以及兩個零矢量通過分配導通時間組合而成。伏秒平衡原理(以Ⅰ扇區為例)如圖4所示。
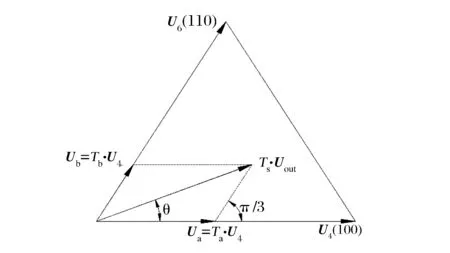
圖4 伏秒平衡原理(以Ⅰ扇區為例)
當合電壓矢量在第1扇區時,根據伏秒平衡原理有:

(6)
式中:Ts為導通周期;T0、Ta、Tb、T7分別為電壓矢量U0、U4、U6、U7的導通時間。
考慮Ts很小,認為在此時間段Uout不變,則式(6)可寫為
Ts|Uout|=T0|U0|+Ta|U4|+Tb|U6|+
T7|U7|=Ta|U4|+Tb|U6|
(7)
根據電壓矢量合成的幾何關系,有:
(8)
由式(5)可知:
|U4|=|U6|=|Udc|
(9)
聯立式(7)、(8)、(9),解出:
(10)
同理,當合成電壓矢量Uout在第i扇區,只需令
(11)
并將θ′代入式(10),便可求出相鄰非零電壓矢量的作用時間。
2.3ABC坐標系到αβ坐標系變換
由以上分析可知,SVPWM控制步驟包括:①求解所需合電壓矢量Uout;②判斷和電壓矢量所在扇區;③求解分電壓矢量作用時間。過程中用到ABC坐標系到復平面坐標系轉換(即αβ坐標系,α為坐標系實軸),以下介紹坐標轉換原理。
2.3.1 坐標投影
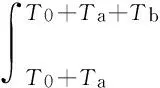
ABC坐標系為三相靜止坐標系,三相空間互差120°電角度,αβ坐標系為空間靜止復平面坐標系,令其實軸α與A相重合,虛軸β超前實軸90°電角度,則兩坐標系坐標幾何關系如圖5所示。
圖5 ABC坐標系到αβ坐標系轉換
uA、uB、uC分別為ABC三相電壓,通常為三相對稱,即相位互差120°。根據投影法則,將三相電壓投影到復平面得
(12)
則合電壓矢量為
uS=uα+juβ
(13)
2.3.2 轉換系數
在ABC坐標系向αβ坐標轉換時,通常在轉換矩陣前乘以轉換系數k,即
(14)
轉換系數k為任意值[8],原因如下。
根據2.2分析,SVPWM控制關鍵在于合成電壓矢量扇區判斷和求解電壓狀態作用時間,扇區判斷依據
(15)
由式(15)可看出,扇區判斷與轉換系數k無關。
將圖5中各參數轉換到αβ坐標系,有:

(16)

(17)
分電壓作用時間
(18)
由式(18)可知,電壓分量作用時間與轉換系數亦無關。
3 Simulink仿真模型
Simulink是Matlab應用下的一個仿真軟件包,可用于控制器開發、電力系統仿真等。其內部提供如電壓/電流源、逆變器等模塊,用戶可在此基礎上開發控制系統、驗證控制方法。
3.1 模型搭建
恒頻、恒壓輸出控制系統仿真模型如圖6所示,主要包括:
①可控直流電壓源:用于模擬發電機轉速變化時經整流后的直流側電壓變化;②電壓源電壓測量模塊:用于將直流電壓反饋至SVPWM模塊;③控制電壓信號源:用戶所需三相電力電壓信號,用以提供控制參考;④坐標轉換模塊:用以將ABC三相坐標轉換為αβ坐標系(采用幅值不變原則);⑤SVPWM模塊:用于接收控制信號uα、uβ、udc,產生PWM信號;⑥逆變器模塊:根據PWM信號控制三對功率開關導通;⑦濾波電路:對逆變器輸出電力進行濾波;⑧A相輸出電壓測量模塊及其顯示模塊:用以測量A相輸出電壓瞬時值及有效值。
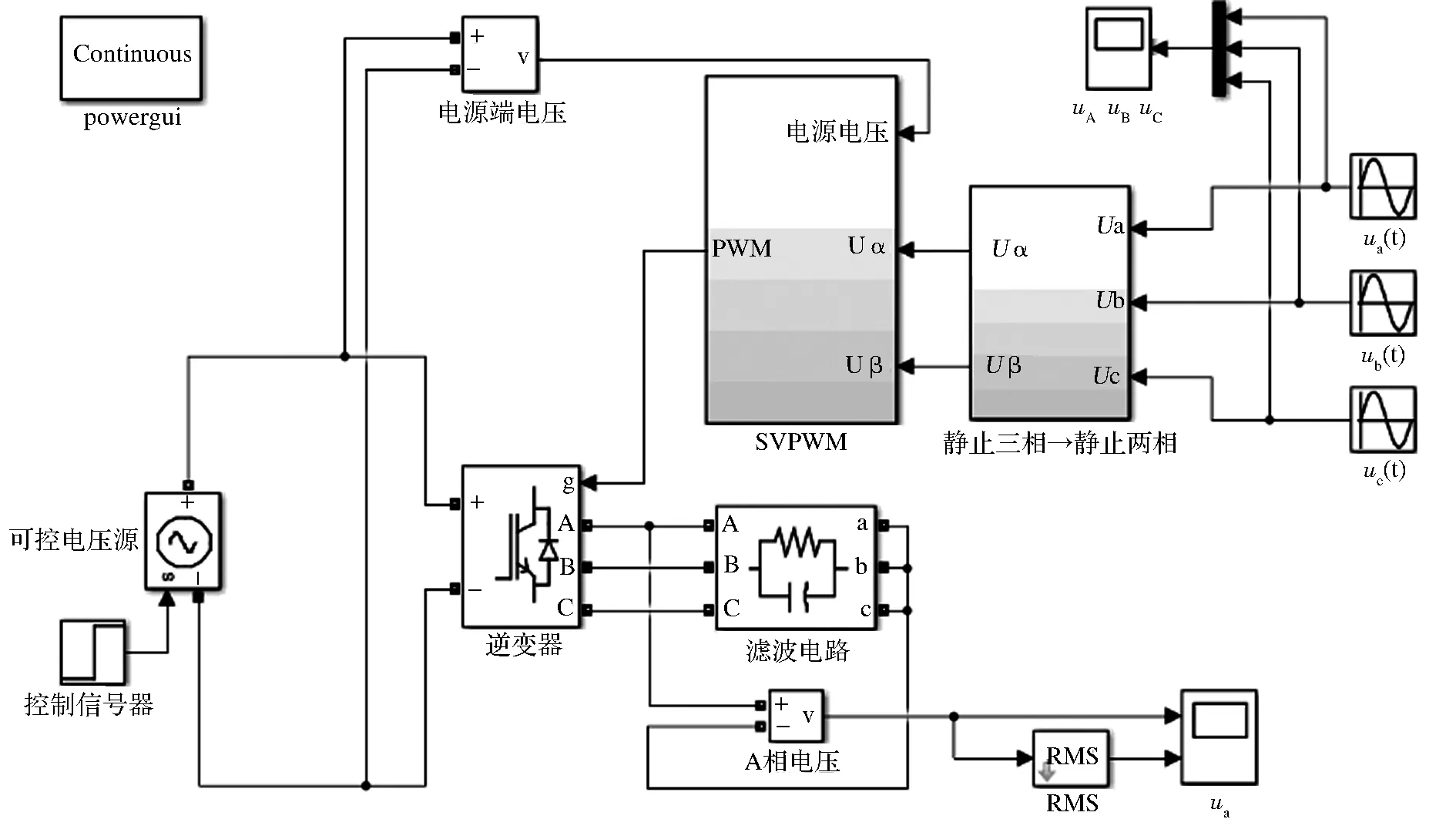
圖6 Simulink仿真模型
3.2 結果分析
模型運行時間0.1 s,可控電壓源采取突變形式模擬,初始值為600 V,0.05 s時突變為1 200 V。控制電壓信號,即用戶所需逆變器輸出的電力為有效值220 V,頻率50 Hz的三相對稱正弦交流電(如圖7所示)。
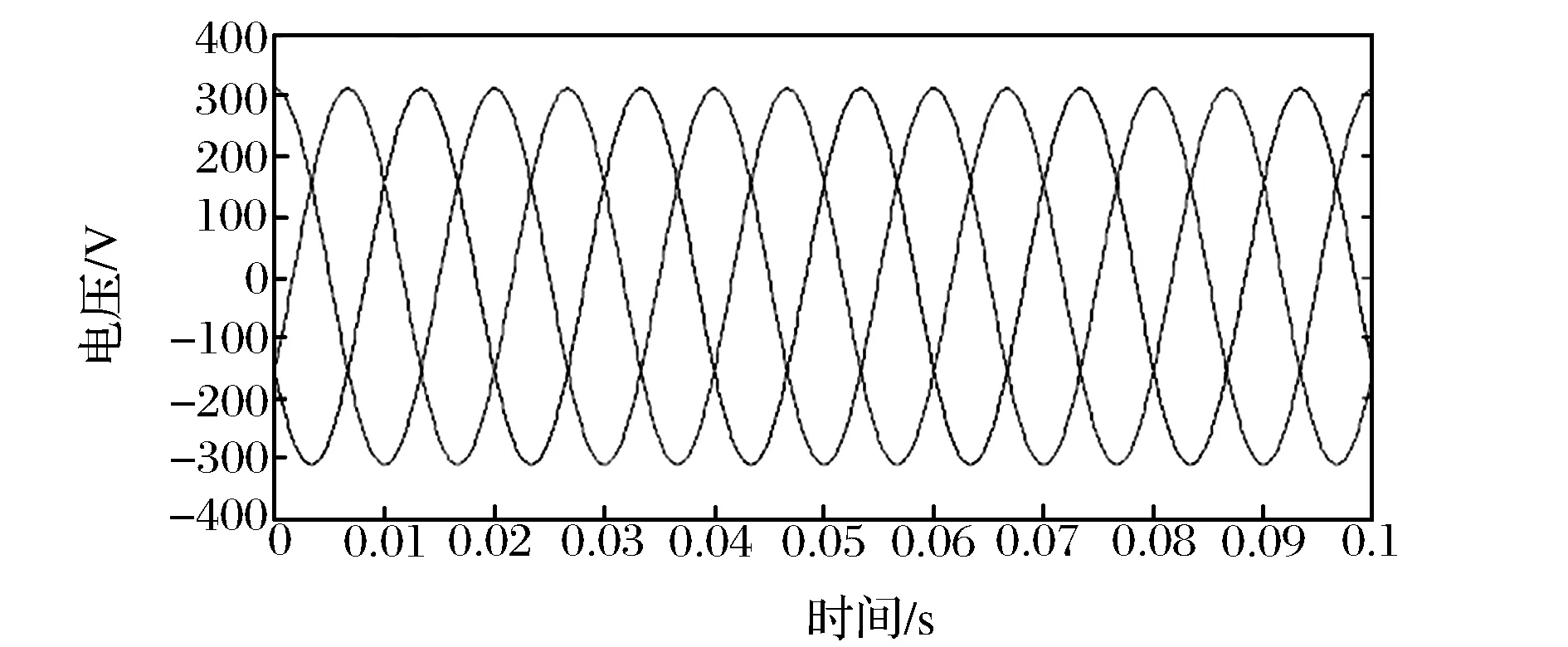
圖7 控制電壓信號
運行模型后,逆變器A相輸出電壓信號如圖8所示。
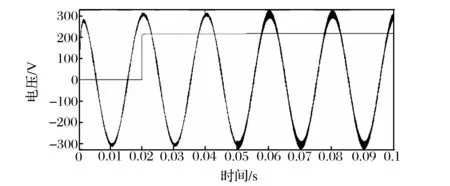
圖8 A相輸出電壓
模型中相電壓有效值由RMS模塊求得,其采用周期積分的方法求解,有效值頻率為50 Hz,故仿真0~0.02 s有效值為0。分析結果可知,當0.05 s直流端電壓從600 V突變為1 200 V時,逆變器輸出電壓瞬時值和有效值基本未發生變化,初步驗證了該控制方法的可行性。
4 結 語
本文介紹了行車變速發電系統組成及SVPWM逆變控制恒頻恒壓輸出原理,詳細分析與SVPWM控制相關的空間電壓旋轉矢量、兩電平三相電壓源逆變器導通時間求解等理論。最后根據SVPWM原理,建立變速恒頻/恒壓發電的Simulink仿真模型。仿真結果顯示,當直流側電壓由600 V突變為1 200 V時,逆變器輸出交流電壓頻率、幅值、有效值均保持預定恒定輸出,驗證了該該控制方法的可行性。
[1] 趙紀龍,林明耀,付興賀,等. 混合勵磁同步電機及其控制技術綜述和新進展[J]. 中國電機工程學報,2014,34(33):5876-5887.
[2] 劉晉. 雙饋風力發電系統控制策略研究[D].北京:華北電力大學,2014.
[3] 馬舜,李偉,劉宏偉,等. 基于液壓傳動的獨立運行潮流能發電系統變速恒頻控制[J]. 電力系統自動化,2011,35(10):59-64.
[4] 何國本.液壓傳動自發電電站技術研究[D].天津:軍事交通學院,2005.
[5] 朱詩順,李靜,孫燕,等.變速恒頻恒壓軸帶發電系統電源品質試驗研究[J]. 軍事交通學院學報,2013,15(9):47-51.
[6] 趙彩虹.車載變速永磯同步發電機恒壓恒頻供電系統的研究[D].北京:華北電力大學, 2016.
[7] 王成元.現代電機控制技術[M].2版.北京:機械工業出版社, 2015:20-27.
[8] WU B, LANG Y Q,ZARGARI N ,et al.風力發電系統的功率變換與控制[M]. 衛三民,周京華,王政,等譯.北京: 機械工業出版社,2012:91-94.
(編輯:史海英)
Simulation on Constant Frequency/ Constant Voltage Output Control in Variable Speed Generation with SVPWM
BIAN Haoran1, ZI Xinyun2, ZENG Fanqi1, CHEN Guanyu1, ZHANG Weifeng2
(1.Postgraduate Training Brigade, Military Transportation University, Tianjin 300161, China; 2.Military Vehicle Department, Military Transportation University, Tianjin 300161, China)
Military hybrid vehicles based on integrated starter generator (ISG) can generate electricity while driving and parking, but the driving speed variation leads to ISG rotation change and changes of three-phase AC power voltage, frequency and rectified DC voltage, which cannot be used for load directly. The paper puts forward a control method called space vector pulse width modulation (SVPWM), which can adjust PWM output according to DC voltage change and output three-phase symmetrical AC power. After introducing the work principle of generating system, it analyzes the control principle of SVPWM, and establishes simulation model of the generating system with Simulink. The simulation result shows that the inverter realizes constant frequency/ constant voltage output while DC voltage changes, which can prove the feasibility of the control method.
space vector pulse width modulation (SVPWM); integrated starter generator (ISG); variable speed generation; constant frequency/ constant voltage; Simulink
2017-04-28;
2017-05-16. 作者簡介: 邊浩然(1992—),男,碩士研究生; 資新運(1971—),男,教授,碩士研究生導師.
10.16807/j.cnki.12-1372/e.2017.08.018
TM461.3
A
1674-2192(2017)08- 0077- 05
● 基礎科學與技術 Basic Science & Technology
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45