三維激光掃描儀在校園建筑物建模中的應用
2017-09-03 10:29:20田振興范天雨
山西建筑 2017年21期
關鍵詞:校園
田振興 王 博 范天雨 董 浩
(華北水利水電大學,河南 鄭州 450045)
·測量·
三維激光掃描儀在校園建筑物建模中的應用
田振興 王 博 范天雨 董 浩
(華北水利水電大學,河南 鄭州 450045)
通過對三維激光掃描儀的基本工作原理及工作流程的介紹,并結合實例,最終實現了校園建筑物模型的建立和網頁發布,為數字校園的建立提供可靠的技術支持。
三維激光掃描儀,建筑物,點云數據,數字校園
0 引言
三維激光掃描技術又稱為實景復制技術,通過大面積高分辨率地快速獲取被測對象表面的三維坐標數據,建立物體的三維影像模型,由于其具有主動性強,能全天候工作;數據獲取速度快,實時性強;數據量大,精度較高;數字特征,信息傳輸、加工、表達容易等[1]獨特優勢,被廣泛應用于測繪工程、水利水電工程、地鐵隧道工程、逆向工程、工廠數字化、安裝工程、BIM建筑掃描、航空航天、自然勘察、古建筑保護、文化遺產等數字化存檔和修復保護,刑偵、事故、安全等調查取證等領域。
本文介紹了徠卡ScanStation P30新一代超速三維激光掃描儀的工作流程,并結合三維激光掃描儀的基本工作原理,實現了從數據采集、數據處理、數據建模以及后期網頁發布的全過程,最后以華北水利水電大學農水實驗場為例,構建了農水實驗場的三維模型,并為數字化校園的建立提供可靠的技術支持。
1 三維激光掃描儀基本工作原理和技術參數
1.1 三維激光掃描儀的基本工作原理
三維激光掃描儀的角度測量系統和激光測距系統能夠完成對物體的快速掃描,通過被測物體表面的反射點到觀測點的斜距、豎直角度、水平角度和反射強度,計算獲得點云數據并自動儲存。
三維激光掃描儀確定一個右手坐標系,坐標系以掃描儀的中心為原點,豎直方向為Z軸正方向,水平掃描面內與Z軸垂直的方向為X軸、Y軸,X軸、Y軸相互垂直,X軸、Y軸、Z軸構成右手直角坐標系[2]。
直角坐標系內點云測量原理如圖1所示。
掃描儀由兩個同步鏡旋轉,并測量每一個激光脈沖來計算被測物體表面到儀器的距離,被測物體任意一個點云P的三維坐標(X,Y,Z)計算公式為:
(1)
1.2 技術參數
本次實例中采用徠卡P30三維激光掃描儀,主要技術參數如表1所示。
2 地面三維激光掃描技術的工作步驟
利用三維激光掃描技術獲取點云數據一般分為三步:第一步:制定掃描計劃;第二步:外業數據掃描;第三步:內業數據處理。在進行具體工作前應制定詳細的工作計劃,一般包括:1)勘察現場,繪制整體平面示意圖。測量人員及記錄人員實地勘察作業環境,包括地形、路面的光滑程度、作業范圍的空間結構,記錄員繪制整體的平面示意圖。2)規劃站點,布置標靶。測量人員根據作業要求,規劃站點的數量及位置并布置標靶,記錄員記錄站點和標靶位置,并在平面示意圖上標注站點和標靶的位置;外業數據掃描主要是對數據的采集并對采集到的數據進行現場分析,檢查其是否符合要求[3];內業數據處理主要是對外業采集到的原始點云數據進行數據去噪、點云拼接、圖像處理、數據建模以及后期的網頁發布等工作。


表1 徠卡P30主要技術參數
3 應用實例
本實例為華北水利水電大學農水實驗場的掃描建模,采用徠卡P30三維激光掃描儀和系統軟件Cyclone 9.1來獲取和處理數據。
1)掃描前的準備工作:因掃描范圍大,將人員分為兩組,一組負責室內掃描;另一組負責室外掃描。小組確定后,小組成員需進行現場勘察,明確掃描線路,合理規劃掃描的觀測站數及觀測站點的位置,標靶粘貼位置及標靶的數量。記錄員繪制整體的平面示意圖,并在平面示意圖上標注站點和標靶位置。因掃描范圍大,結構復雜,共設置站點63個,其中室內40個,室外23個。本次實驗由于測站數較多,圓形磁性靶標難以滿足實驗要求,故采用4.5 in紙質標靶并粘貼在建筑物的表面。
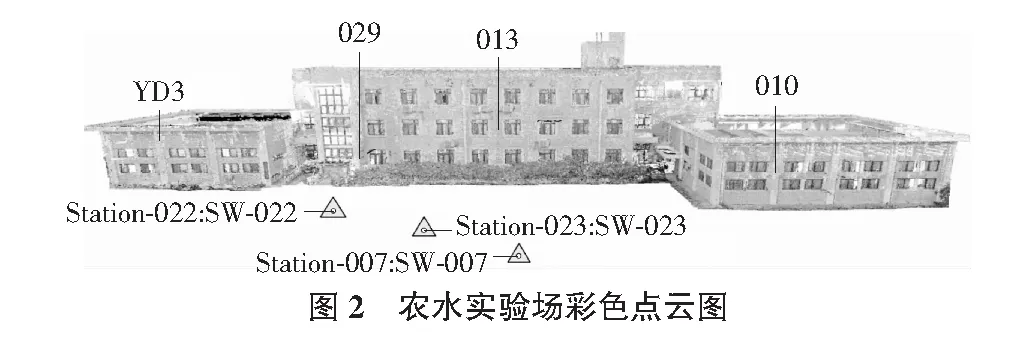
2)掃描:采用徠卡P30三維激光掃描儀對農水實驗場場地進行全面掃描,因儀器較為先進,可實時監測獲取數據的有效性,對不合格的數據予以刪除并進行重新掃描。本次實驗采用全景掃描,部分采用自定義掃描。掃描方式為掃描加拍照。分辨率為6 mm@50 m,靈敏度為正常。圖2為農水實驗場的彩色點云,其中YD3,013,029,010等為標靶的識別,Station-023,Station-007,Station-022為站點位置標號。
3)測量標靶坐標:為了更加直觀表現建筑物數字化的特點,在標靶粘貼完畢后選取了6個特征標靶,并測量了這6個標靶的坐標值,用于賦予點云數據真實的坐標值。坐標格式為X,Y,Z形式。
4)點云數據拼接:點云數據拼接模式主要包括基于標靶的拼接、基于特征點的拼接、基于測量點的拼接以及混合拼接等方式。因本次實驗采用大量標靶,并在標靶布置時確保兩站至少有4個以上標靶重合[4],且3個標靶未在一條直線上,故采用基于標靶拼接的形式進行點云數據的拼接,這種拼接方式速度快,且拼接精度極高,提高了內業數據處理的效率,具體的拼接誤差如圖3所示,拼接精度控制在6 mm以內。

5)數據去噪:在掃描農水實驗場場地時,由于建筑物周圍有樹木、雜草、行人的干擾,對整體效果產生影響,需進行去噪處理,選中噪聲數據通過Cyclone軟件中的Fence/delete inside工具以手動的方式刪除那些不屬于建筑物的噪聲點[5]。
6)三維模型建立:本次實驗的三維模型由系統軟件Cyclone以及第三方軟件(3DMax)建立,建成的模型進行了貼圖和渲染,最終成果圖如圖4所示。
7)網頁發布:本次實驗將最終模型通過Cyclone的TruView插件進行了網頁發布,師生可以免費下載TruView插件進行遠程瀏覽,并可在網頁內對農水實驗場現場進行量測,包含坐標點量測、距離量測等簡單的量測,網頁發布成果圖如圖5所示。


4 遇到的問題
掃描過程中因設站地點與標靶粘貼角度問題,以及掃描場地的限制,在后期數據拼接過程中,標靶中心點不能得到清晰的識別,然而采用尋找特征點(墻角,房檐等)的方式拼接,導致拼接誤差很大。故最終需重新獲取不合格的標靶信息,對于不合格的標靶信息,采用直接獲取標靶中心點的方式,雖然采用這種方式降低了工作效率,但是減少了后期數據拼接的工作量,同時也大大減小了數據拼接的誤差。
5 結語
本文介紹了徠卡P30三維激光掃描儀獲取空間數據的基本工作原理及工作流程,通過對農水實驗場場地的掃描,完成了從數據獲取、數據拼接、數據濾波、三維建模以及網頁發布的整個流程,方便師生對現場進行遠程瀏覽。下一步的研究試圖將整個校園的建筑物進行全面掃描,建立一個完整的三維模型,并進行網頁發布,為數字校園的建立提供可靠的技術支持。
[1] DINESH M, RYOSUKE S. Auto-extraction of Urban Features from Vehicle-Boren Laser Data[Z]. Symposium on Geospatial Theory Processing and Application, Ottawa,2002.
[2] 張慧霞,陳宜金,劉國波.基于三維激光掃描儀的校園建筑物建模研究[J].測繪工程,2010,19(1):32-38.
[3] 劉 春,楊 偉.三維激光掃描對構筑物的采集和空間建模[J].工程勘察,2006(4):47-50.
[4] 趙 煦,周克勤,閆 利,等.基于激光點云的大型文物景觀三維重建方法[J].武漢大學學報,2008,33(7):684-687.
[5] 宮麗瑋,張 毅,閆 利.基于Cyclone和PolyWorks的三維建模實現[J].地理空間信息,2012,10(5):38-49.
Application of 3D laser scanner in campus building modeling
Tian Zhenxing Wang Bo Fan Tianyu Dong Hao
(NorthChinaInstituteofWaterConservancyandHydroelectricPower,Zhengzhou450045,China)
In this paper, it introduced the working principle and working process of the 3D-laser scanning. Finally, through an example realize the establishment of the campus building model and web publishing, it has provided reliable technical support for establishing digital campus.
3D-laser scanning, building, point cloud data, digital campus
1009-6825(2017)21-0191-02
2017-04-27
田振興(1992- ),男,在讀碩士; 王 博(1987- ),男,博士,講師; 范天雨(1992- ),男,在讀碩士 董 浩(1992- ),男,在讀碩士
P234
A
猜你喜歡
兒童故事畫報(2019年2期)2019-01-22 20:01:06
兒童故事畫報(2019年1期)2019-01-18 00:40:46
兒童故事畫報(2018年12期)2018-12-20 23:14:52
兒童故事畫報(2018年11期)2018-11-15 23:48:04
兒童故事畫報(2018年10期)2018-10-24 21:22:06
兒童故事畫報(2018年9期)2018-10-23 19:25:02
兒童故事畫報(2018年7期)2018-10-23 19:24:54
南方周末(2018-06-28)2018-06-28 08:11:04
琴童(2017年3期)2017-04-05 14:49:04
小天使·二年級語數英綜合(2017年3期)2017-04-01 17:17:48
