海戰仿真系統自然環境通用數據框架研究*
2017-09-03 10:17:22孫永侃柏羽
現代防御技術 2017年4期
孫永侃,柏羽
(海軍大連艦艇學院,遼寧 大連 116018)
海戰仿真系統自然環境通用數據框架研究*
孫永侃,柏羽
(海軍大連艦艇學院,遼寧 大連 116018)
海戰場自然環境仿真是海戰仿真系統建設的重要基礎。分析了海戰仿真系統自然環境仿真的特點與需求,提出了基于多粒度的海戰仿真系統自然環境仿真的特征要素;構建了一個海戰仿真系統的自然環境通用數據框架,運用動態和靜態數據結合和多數據網格組合的方式實現了自然環境要素的XML描述;完成了基于VR- Forces的海戰仿真系統自然環境數據設計。建立的自然環境通用數據框架能夠為海戰仿真系統各模塊開發提供快速數據支持。
海戰仿真;多粒度;VR- Forces;自然環境仿真;通用數據框架;數據場
0 引言
海戰場自然環境指存在于海戰場范圍內能夠對軍事活動產生干預作用的各種自然環境因素的總和[1]。海戰場自然環境涉及到龐大的數據量,部分環境數據更新速度快,變化規律不明顯,且各海戰仿真系統按照功能、層次不同,對自然環境的數據需求也各有側重,因此海戰場自然環境仿真始終具有一定的難度。傳統依據具體海戰仿真系統的需求建立數據庫的方式具有較強的針對性,但會消耗大量的時間和成本,擴展與重用能力不強。
一個準確、一致、可重用的自然環境通用數據框架能夠有效提高仿真效率,降低開銷,更好地管理各類自然環境數據。
VR- Forces自帶一個地形處理工具TDB Tools(tool- directed behavior tools),提供用于顯示及計算用的地形數據,產生人文特征數據、地理信息數據和標繪數據等[2],為海戰場自然環境仿真,尤其是地形仿真,提供了有力的支持。
本文設計了一個基于VR- Forces的海戰仿真系統自然環境通用數據框架,為各類海戰仿真系統提供自然環境數據支持,進而為系統間的互通互聯提供基礎。
1 海戰場自然環境仿真的特點
海戰場自然環境仿真指利用衛星、航天航空、地面等多種偵察手段獲取各項海戰場自然環境信息后,借助先進的計算機仿真技術、可視化技術、圖形圖像技術以及多媒體技術,通過計算機對獲取到的信息進行綜合處理,近似模擬出真實的海戰場自然環境,從而為各類作戰模擬、裝備作戰仿真等工作提供虛擬環境的支持[3]。在進行海戰場自然環境仿真時應著重體現其多維的結構特征、鮮明的層次特征以及復雜的要素關聯特征等[1,4]。
(1) 海戰場自然環境具有多維的結構特征
現今的海戰場涵蓋了海洋、上方天空以及一部分陸地,對應的包含了海戰場中海洋范圍內的自然環境、天空范圍內的自然環境以及陸地范圍內的自然環境。三者共同構成整個海戰場自然環境。
(2) 海戰場自然環境具有鮮明的層次特征
一方面是內容需求的層次性,海戰場自然環境的組成要素會隨海戰目的不同顯現出不同側重;另一方面是精度需求的層次性,海戰場自然環境數據的精度需求會隨海上作戰規模、級別的變化,產生不同的層級特性。
(3) 海戰場自然環境具有復雜的要素關聯特征
海戰場中海洋范圍內的自然環境、天空范圍內的自然環境以及陸地范圍內的自然環境在具有各自變化規律的同時,相互間還存在復雜的關聯。通過不斷的影響、交互,共同作用于整個海上作戰。
2 海戰仿真系統自然環境仿真的需求
本文按照維度的區別,將海戰仿真系統中自然環境分為3個方面,分別是海洋地形環境、海洋水文環境和海洋氣象環境。其中海洋地形環境仿真主要是為模擬整個海洋地形的高低起伏變化,并對依附在地形上的土質、建筑等進行描述;海洋水文環境仿真主要是對洋面水文環境以及水體水文環境2個部分進行模擬;海洋氣象環境仿真主要是對覆蓋在海洋地形和海洋水文上的氣候背景、天氣現象等進行模擬。
2.1 海戰仿真系統地形環境仿真需求
海洋地形環境涵蓋整個海底、海岸以及延伸至一定范圍陸地上的全部地形環境,包括整個地形變化以及覆蓋在其上的土質、建筑等。
通常整個地形的變化需要借助DEM(digital elevation mod)進行描述。DEM一般通過表面建模得到,常用的建模方式有2種[5]:一種是基于三角形的表面建模,適用于所有的數據結構;另一種是基于格網的表面建模,常用于模擬平緩地區。2種方法分別能夠生成TIN(time- invariant network)型DEM或是格網型DEM。由于其數據在整個二維平面上是連續分布的,即對網格上的任意點(x,y)上都有相應的高程數據,因此可以借助一個或多個2D(2 dimensional)數據網格來體現。
2.2 海戰仿真系統水文環境仿真需求
海洋水文環境指海洋的整個水體環境,包括海面水文環境以及水體水文環境2個方面。海面水文環境指發生在海平面附近的海面狀況,如海浪、海流、海冰、潮汐等。水體水文環境指海洋內部及深處的海區物理、化學、生物等性質及其變動情況,如海水溫度、海水鹽度、海水密度等基本物理量以及海水傳輸特性和海洋噪聲等。
對于海洋水文環境來說,其屬性適用于數據場的形式表現,即可將海洋水文環境對象的各種屬性看作在時間和空間上連續分布的場,在任意點(x,y,z,t)上都可以得到相應的屬性值。海水溫度、鹽度等都能抽象為海洋水文環境對象,并可劃分為二維水文環境和三維水文環境2類[6],同類水文環境對象可以借助近似的數據場來表現,其中二維水文環境如海浪、潮汐等,三維水文環境如海水溫度、海流等。根據具體的數據組織方式,可以進一步將這些海洋水文環境表現為一個或多個2D,3D(3 dimensional)數據網格。
2.3 海戰仿真系統氣象環境仿真需求
海洋氣象環境指覆蓋在海洋地形之上的全部大氣空間,包括氣候背景、氣象特性、天氣現象3個方面[7]。氣候背景指海洋所處區域中大氣物理特征的長期平均狀態,如平均降水情況、平均日照情況等,通常由氣象站點提供直接數據或等值線分布圖來顯示。氣象特性包括大氣的基本物理量,如大氣溫度、大氣濕度、大氣壓強等,以及大氣的傳輸特性。天氣現象指發生在天空中的一切物理現象,如風、雨等。
對于海洋氣象環境來說,與海洋水文環境類似,同樣能夠采用數據場的形式進行表現,將風、霧等都抽象為海洋氣象環境對象,在任意點(x,y,z,t)上存在相應海洋氣象屬性值。海洋氣象環境涉及到的數據量非常大,為了便于組織這些數據,將其分為二維氣象環境和三維氣象環境2類,其中二維氣象環境如雨、云等,三維氣象環境如大氣溫度、風等,分別可以利用一個或多個2D,3D數據網格進行模擬。
3 基于多粒度海戰仿真系統自然環境仿真的特征要素
3.1 海戰仿真系統自然環境仿真的多粒度問題
對于海戰仿真系統自然環境仿真來說,其數據的粒度能夠對仿真運行的效率產生很大影響。理論上,高粒度的自然環境數據更能模擬出真實的自然環境,但高粒度數據的來源往往受到限制,且在系統運行時也會帶來很大的負擔[8]。
在實際仿真過程中,不同層次、功能的海戰仿真系統對自然環境數據的要求存在差異,主要體現在2點[9]:
一是海戰仿真系統中自然環境的組成要素會隨著系統仿真目的的不同出現差異,如對水面艦艇防空作戰進行仿真時,更側重對水上自然環境的仿真,對水下自然環境的要求相對較低,而對水面艦艇反潛作戰進行仿真時則相反;二是海戰仿真系統選用自然環境數據的精度會隨海上作戰的規模、級別出現差異,如進行裝備級仿真時,對單武器使用相關的自然環境經度要求較高,而進行聯合作戰級仿真研究時,對單武器產生影響的小部分自然環境要素可適當忽略處理。
由上述差異可知,沒有必要對所有自然環境要素都采用高粒度數據描述。采用多粒度數據對同一自然環境要素進行描述,對時空變化迅速或與仿真實體關系密切的自然環境需采用高粒度數據進行描述,反之采用低粒度數據即可,這樣能大大提升系統仿真效率。
在具體仿真時,海洋地形環境數據、海洋水文環境數據與海洋氣象環境數據都具有連續分布的特點,可按照具體環境的特點抽象為2D,3D環境類,并以網格形式體現[10]。那么,海戰仿真系統自然環境數據的多粒度問題就能夠轉化為多數據網格的組合問題。
基于海戰仿真系統自然環境仿真的多粒度問題,提出與各類海戰仿真系統緊密相關的環境特征要素,以便運用面向對象的思想對海戰仿真系統自然環境數據框架進行設計與實現。
3.2 海戰仿真系統地形環境特征要素
海洋地形環境包括覆蓋在整個海底、海岸并延伸至一定范圍陸地上的全部地形環境。將其分為海區劃分、海面概況、水深和灘質與底質4部分,基本能夠涵蓋海戰場橫向及縱向上的地形特征要素,如圖1所示。
對海區劃分來說,包括海岸帶、大陸坡、海峽等,不同海區的地形起伏狀況不同,通常采用地形高程數據體現,即可以通過各個任意點上的高程屬性來反映整個地形的變化。水深數據特點與之類似,同樣可以通過任意點上的水深屬性來體現。因此可以將海區劃分和水深數據歸為2D地形環境(geography_2D)類進行描述。對于海面概況來說,主要包括海面上的各類礙航物和助航設備,灘質底質數據特點與海面概況數據類似,根據這類數據的特征,也可以將其歸為geography_2D類。
此外,海洋地形變化緩慢,并且各類軍事活動對地形產生的影響較小,地形的變化可以忽略,因此各類海戰仿真系統普遍對動態地形要求不高。在此本文將海洋地形數據作為靜態數據描述。
3.3 海戰仿真系統水文環境特征要素
海洋水文環境隨時間變化比較迅速,對仿真實時性影響較大,因此大多使用動態數據進行記錄,如圖2所示。
對于海水基本物理量來說,其溫度、鹽度、密度與所在位置及深度相關,其數據呈現三維上的特征,因此可將海水基本物理量作為3D水文環境(hydrology_3D)類進行記錄。同樣,對于海洋噪聲、海水傳輸特性、海流來說,其數據特征與海水基本物理量類似,也視為hydrology_3D類。而海浪、潮汐、海冰主要作用在海洋的表面,其數據可作為2D水文環境(hydrology_2D)類進行記錄。
此外,水文基本物理量如溫度、鹽度、密度等隨時空動態變化;海浪變化復雜,實時性強;海冰會隨著海面動態進行無規律變化;海洋噪聲也受多方面因素影響,將這些水文環境作為動態數據描述。而傳輸特性通常能夠保持穩定,因此可認為是靜態的屬性。海流、潮汐的運動數據一般都具有相對穩定的規律性,可以借助數據表作為靜態數據記錄[11]。
3.4 海戰仿真系統氣象環境特征要素
海洋氣象環境和海洋水文環境類似,變化快且無明顯規律,因此基本也采用動態數據進行描述,如圖3所示。
對于大氣基本物理量來說,其溫度、濕度、壓強、密度相當于一個在空間上連續分布的場,具有三維特征,因此將大氣基本物理量作為3D氣象環境(atmosphere_3D)類數據進行記錄。同樣風、能見度、傳輸特性等在數據特性上也呈現出這種三維的分布,也將其歸為此類。而對于氣候描述、雨、霧等氣象環境來說,將其數據記為2D氣象環境(atmosphere_2D)類即可。
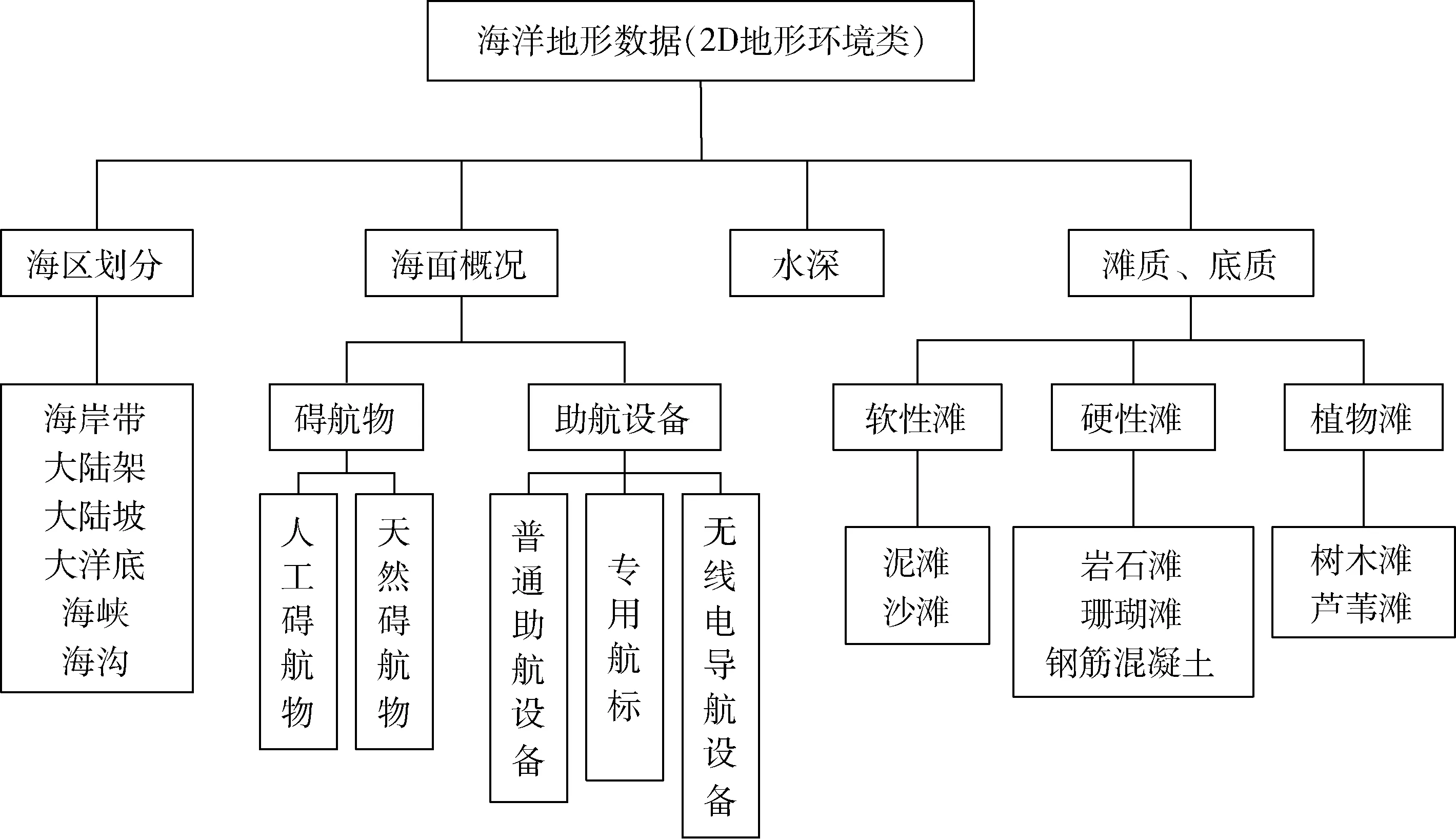
圖1 基于多粒度的海洋地形環境特征要素Fig.1 Characteristicelements of ocean topography environment based on multi- granularity
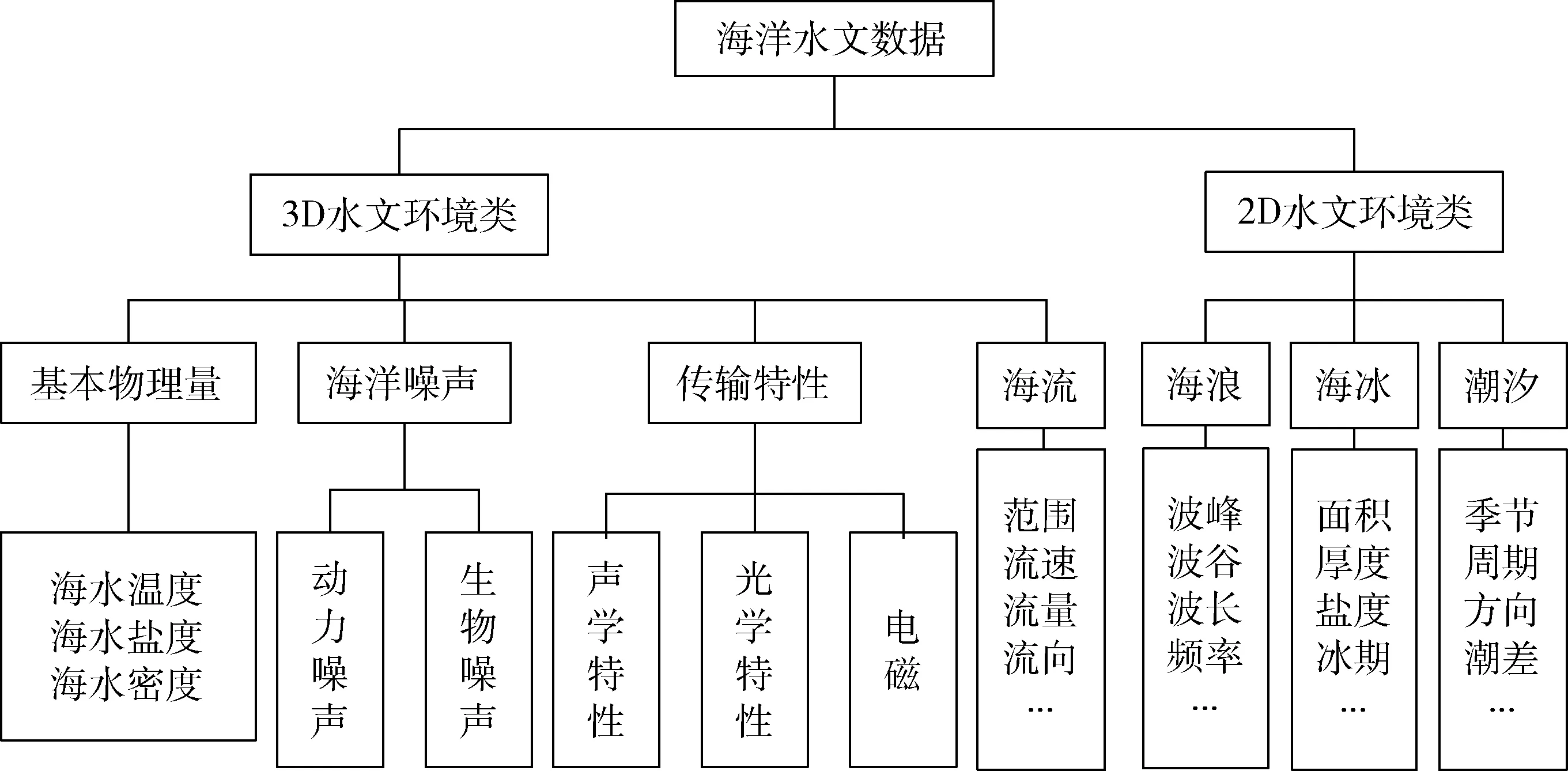
圖2 基于多粒度的海洋水文環境特征要素Fig.2 Characteristicelements of ocean hydrology environment based on multi- granularity
此外,除氣候描述,即對某一區域總體氣候特性進行描述,基本保持不變外,大氣對聲、光、磁傳播的影響也被認為是有固定規律的靜態數據[12-13]。而海洋氣象的基本物理量,以及風、云、雨、雪、噪聲、能見度等要素多隨時空變化較快,且互相之間存在影響,需要用動態模型描述,以保證仿真的真實性。
4 海戰仿真系統通用自然環境仿真數據框架及描述
4.1 海戰仿真系統自然環境仿真數據框架
海戰仿真系統是面向海上軍事任務的,其自然環境數據框架需要具備2個功能[14-16]:一是需要對近海沿岸到遠海以及海底深處到海面上空的范圍內,與軍事任務有關的所有自然環境要素進行抽象和描述;二是能夠與各個數據源以及各類仿真子系統進行交互,具體框架如圖4所示。
海戰仿真系統環境數據框架涵蓋了與海上軍事活動密切相關的海洋地形、海洋水文和海洋氣象3類環境。其環境數據量十分龐大,將自然環境數據劃分為動態和靜態2類數據進行描述能夠有效提高仿真運行效率。
此外,對于不同功能、層次的海戰仿真系統來說,其對自然環境數據的粒度需求往往不同。因此,應對自然環境要素進行多粒度數據描述。自然環境中的各個要素都能夠借助獨立的數據網格進行記錄,利用這種特性,基于面向對象的方式,對多粒度自然環境數據的表示進行分析,其結構圖如圖5所示。
其中,Field定義了不同類型的自然環境數據,如Geography_2D,Hydrology_3D,Atmosphere_3D等都從Field下繼承,分別對海洋地形、海洋水文以及海洋氣象中各類環境的數據場進行定義。Grid定義了所有水文和氣象數據網格,Rectangle Grid和Curvilinear Grid都是從Grid下繼承,主要用于處理海洋水文、氣象環境數據。DEM指地形高程數據,包括格網型DEM和不規則三角網DEM 2類,用于處理海洋地形數據。此外,Scenario為不同自然環境類提供了想定接口。Env database(environment database)提供了各類自然環境數據庫等數據來源接口。
4.2 海戰仿真系統自然環境要素的描述
海戰仿真系統自然環境通用數據框架能夠為各仿真子系統提供數據支持及數據共享的前提是對數據進行一致、完整、無歧義的分類及描述。基于上述分析,運用面向對象設計方法,將提取出的各環境要素進行類定義。以海洋氣象環境中的風為例,首先對風進行要素分解,其描述結構如下:
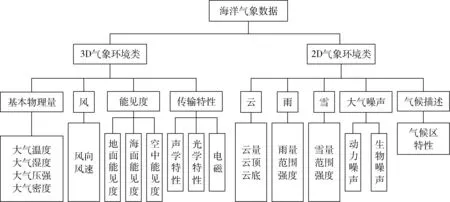
圖3 基于多粒度的海洋氣象環境特征要素Fig.3 Characteristicelements of ocean meteorology environment based on multi- granularity
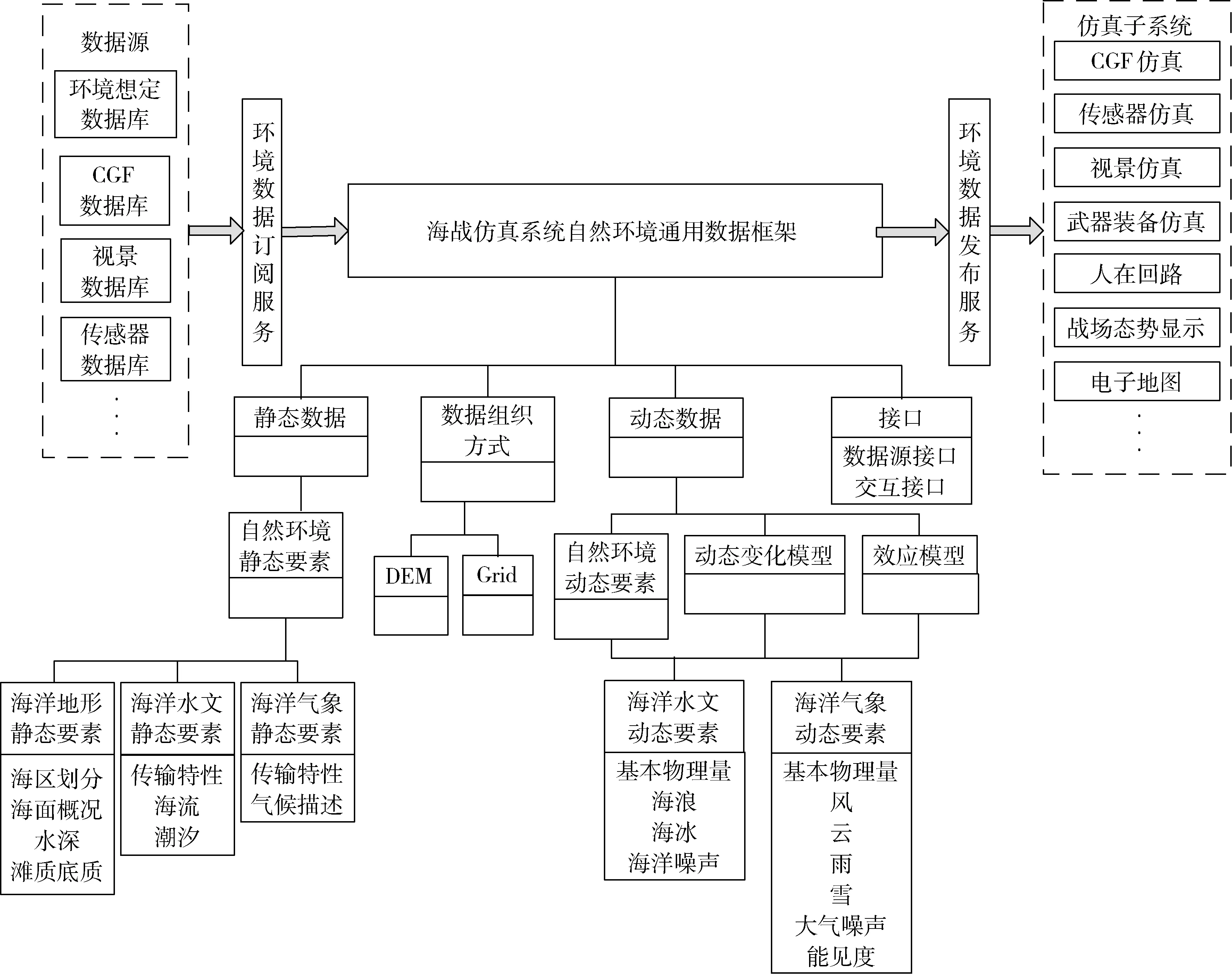
圖4 基于多粒度的海戰仿真系統自然環境數據框架Fig.4 Natural environment data framework of naval warfare simulation system based on multi- granularity
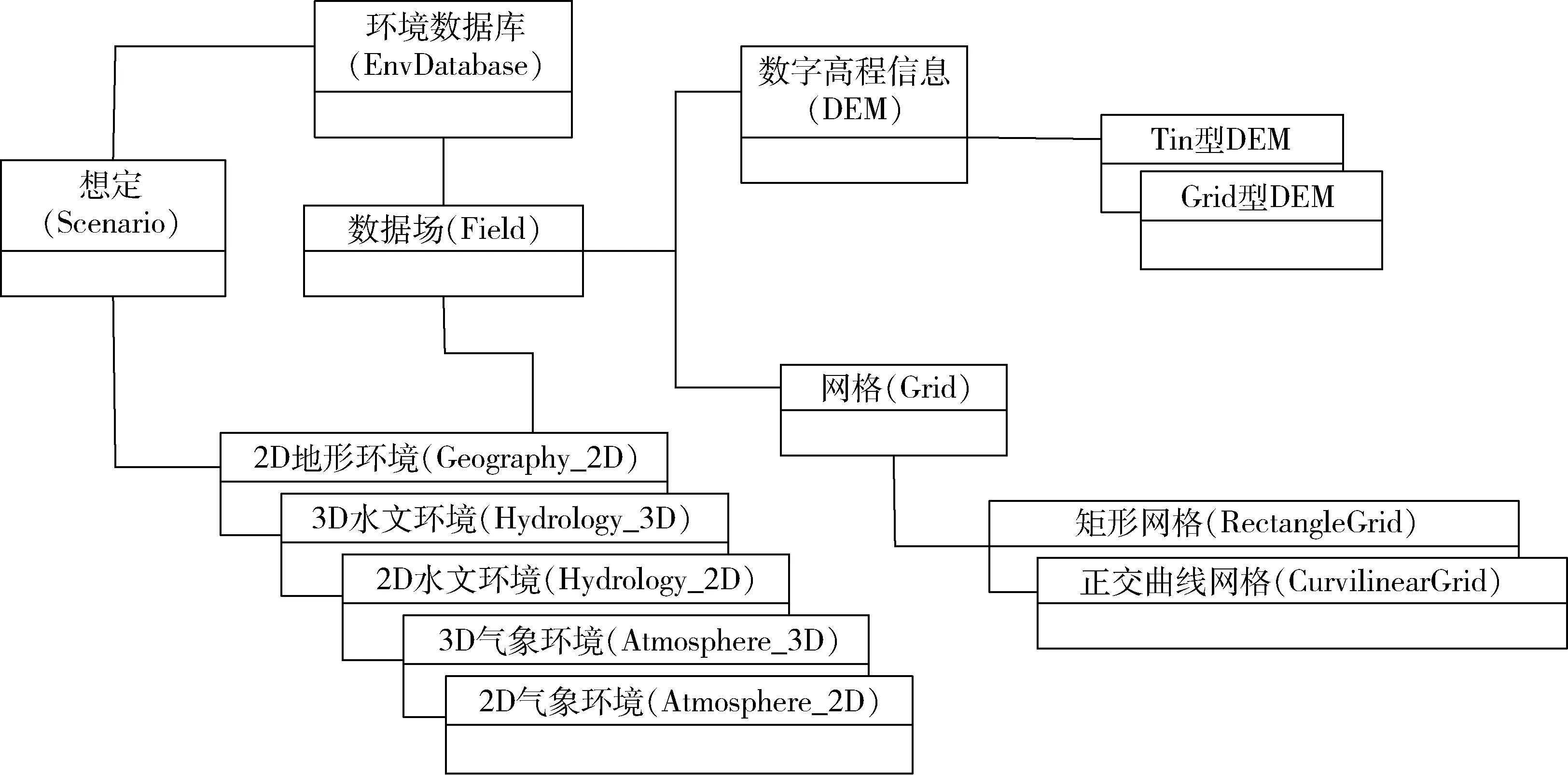
圖5 多粒度自然環境數據表示模型Fig.5 Natural environment data model based on multi- granularity
其描述要素主要分為風向wind_direction和風速wind_speed 2類,其中風速在實際仿真過程中又可按照標準坐標分為3個軸向的風速,分別記為wind_speed_x,wind_speed_y,wind_speed_z。
對于風來說,其各要素的描述數據在三維空間中呈現連續變化,則將其風向以及3個軸向的風速歸為atmosphere_3D類進行記錄,以數據場的形式對風進行描述,在具體仿真時,根據仿真需求通過grid類生成滿足需要的數據網格,解決風的多粒度描述問題,結合具體數據,共同形成其描述方式,如圖6所示。
5 基于VR- Forces的海戰仿真系統自然環境通用數據框架的實現
VR- Forces是SAF(semi automated forces)結構的GCF(computer generated forces)建模與仿真軟件。其API(application program interface)使用戶可定制VR- Forces中的任何功能,或將VR- Forces功能集成到用戶自己開發的應用中。借助該軟件能更好地為海戰仿真系統的建設提供支持。
5.1 基于VR- Forces的自然環境設計
VR- Forces的二維態勢地形為態勢顯示提供二維位背景和位圖顯示控制接口,各種格式的位圖數據要轉化為MAK PVD平臺下的GDB格式[17],其GDB地形生成流程如圖7所示。
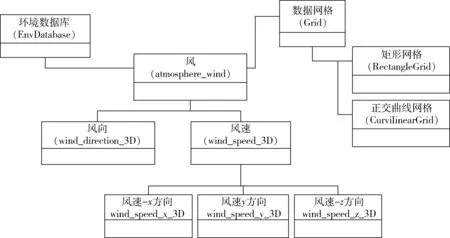
圖6 海洋氣象環境中風的數據描述結構Fig.6 Data represent structure of wind of ocean meteorology environment
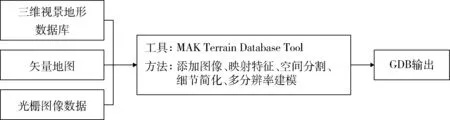
圖7 GDB地形生成流程Fig.7 Generating procedure of GDB topography
VR- Forces地形數據庫生成方式為構造地形三維模型并制作紋理圖片,從而生成三維視景地形數據庫,生成過程如圖8所示,具體操作步驟如下:
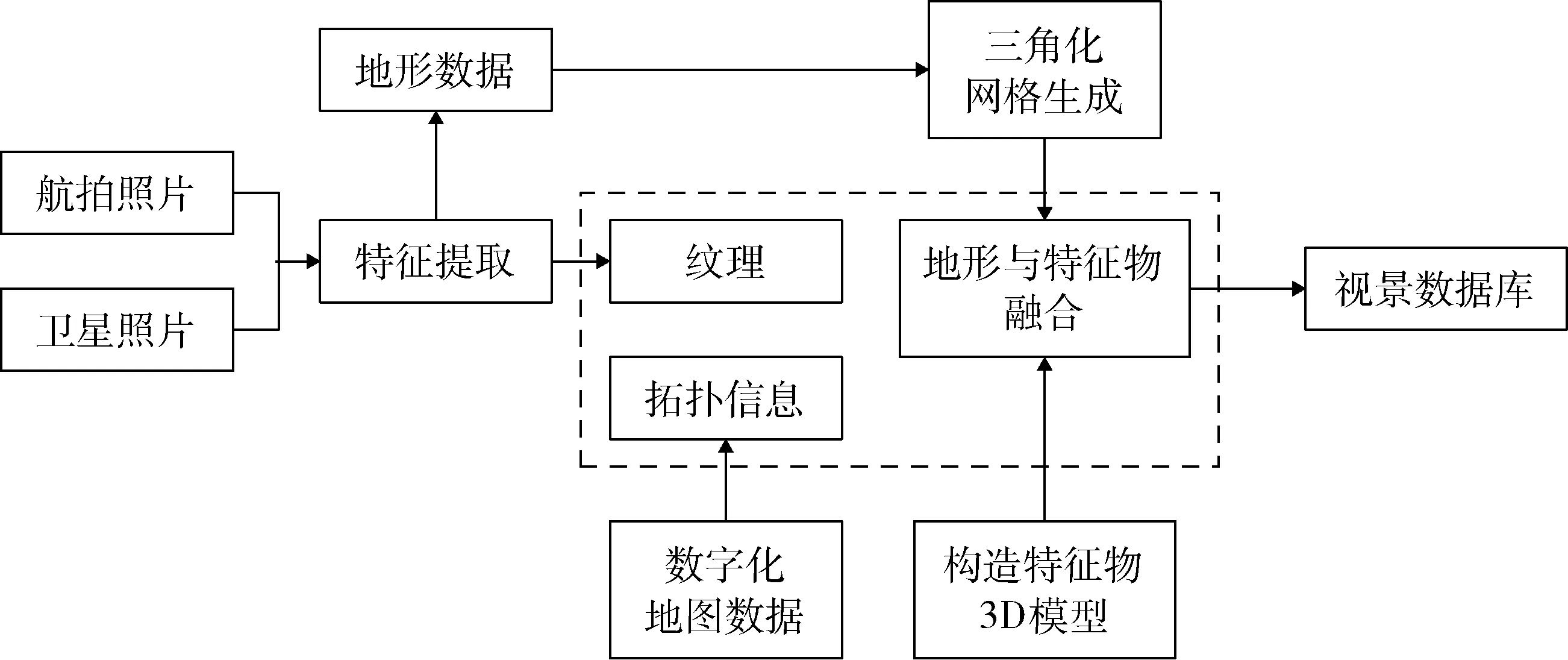
圖8 地形數據庫生成過程Fig.8 Generating procedure of topography data base
(1) 添加高程數據到新建工程中。通過地形的高程信息,模擬地面的起伏,并對實體運行產生約束。此時會生成GDB和MTD文件,MTD文件記錄了高程數據以及紋理貼圖數據的坐標位置。
(2) 將衛星照片、航拍照片或紙地圖等相關的圖片紋理加到GDB的上面,圖片若具有坐標數據,會自動對應到GDB上相應的坐標中。此時會生成一個MTP文件,即目前制作的地圖。
(3) 地形工程創建完成后,通過設定不同三角面片的屬性,使其代表不同類型的地形。在地形中設置一些人文特征的點、線、面數據,這些數據會對實體的碰撞檢測與人工智能產生影響。
對于海洋水文、海洋氣象來說,其數據多為動態數據,VR- Forces在進行仿真時通常借助其他仿真服務器進行,通過一定的接口與之進行數據交互,獲取所需數據。在進行海洋水文、海洋氣象仿真時,通常采用2種方法:一是只存儲它們的初始數據,離線生成固定時間間隔的動態數據,仿真運行時只需按時間調用相應的數據;二是在仿真系統運行時,利用動態變化模型在不同仿真時刻進行相應的數據更新。
5.2 基于VR- Forces的海戰場環境下的作戰仿真
建立了海戰仿真系統自然環境通用數據框架后,就可以進行具體的作戰仿真了。VR- Forces的分布式體系結構可將整個仿真應用分布于多個仿真引擎上,并可通過一個或多個前端遠程GUI(graphical user interface)進行控制。而多個前端遠程GUI能進行協調訓練或劇情生成。借助于遠程控制應用程序接口,可定制用戶接口或通過其他應用控制仿真引擎[18]。指揮員可以使用VR- Forces GUI定制用戶接口,繪制自己的圖層和可視化其他的數據。在作戰仿真中,VR- Forces實體與地形進行交互、探測,與敵軍交戰并計算損傷程度。
本文給出如圖9~12的仿真實例。圖9為VR- Forces環境下生成的海戰自然環境,圖10為VR- Forces海戰場環境下的敵我對峙,圖11為VR- Forces海戰場環境下的導彈攻擊,圖12為VR- Forces海戰場環境下的導彈命中目標。

圖9 VR- Forces環境下生成的海戰自然環境Fig.9 Nature environment of naval warfare generated by VR- Forces
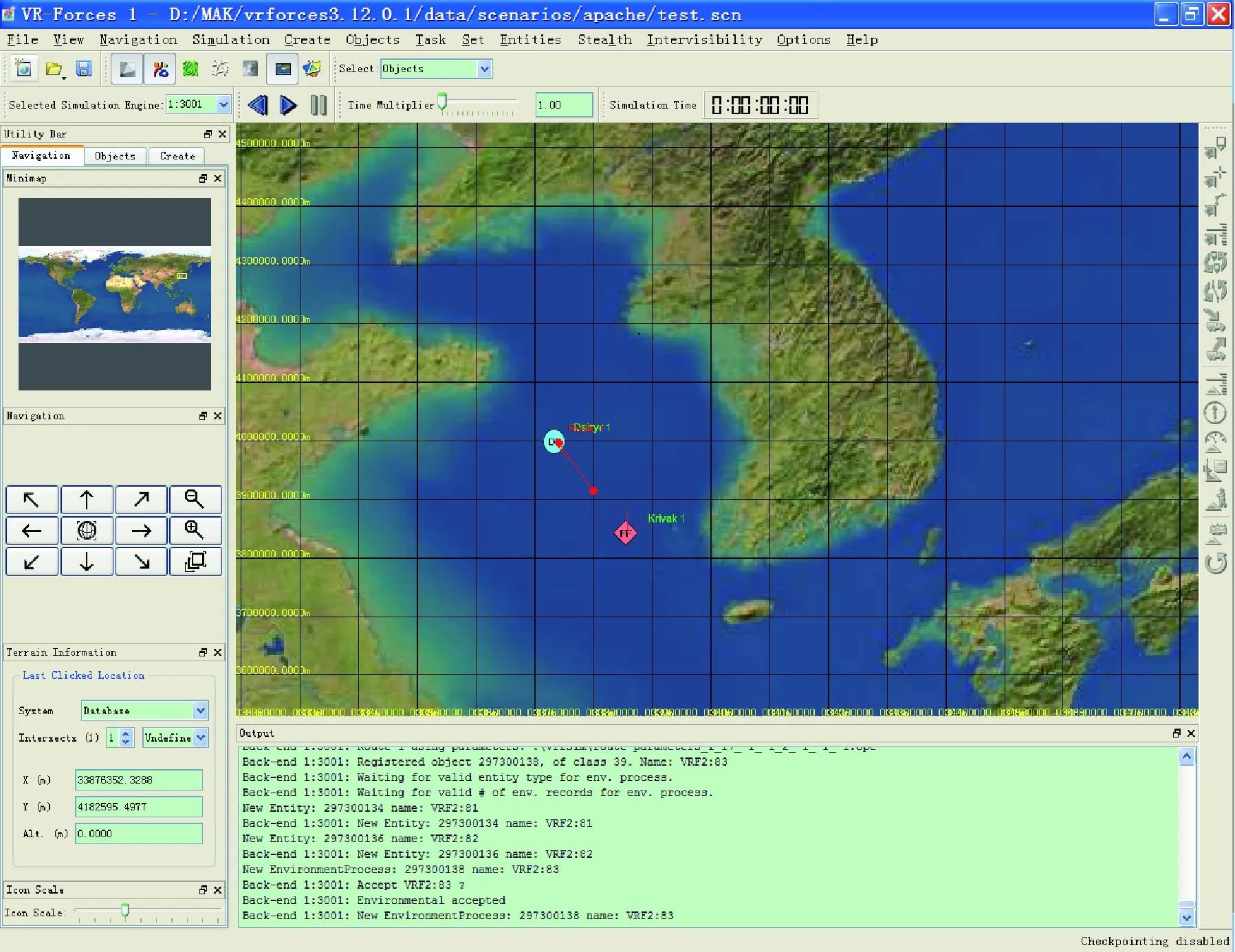
圖10 VR- Forces海戰場環境下的敵我對峙Fig.10 Confrontation between the enemy and ourselvesin naval warfare environment generated by VR- Forces

圖11 VR- Forces海戰場環境下的導彈攻擊Fig11 Missile attack in naval warfare environment generated by VR- Forces

圖12 VR- Forces海戰場環境下的導彈命中目標Fig.12 Target hit by missile in naval warfare environment generated by VR- Forces
VR- Forces的可擴展性能夠為海戰場仿真提供完整的計算機兵力生成環境。在仿真執行過程中,通過生成和執行戰場劇情,為戰術指揮訓練模擬器系統、威脅生成系統、行為模型測試系統提供必需的仿真數據。 指揮員可以通過編輯參數配置文本文件對機動載體的動力學模型、行為、戰術、損傷模型、傳感器、對策和武器進行配置。指揮員還可以通過簡單的鼠標點擊和鍵盤輸入方式進行兵力布局、創建行動路線、為實體分派任務和布置計劃。對特定戰場環境下的特定作戰想定進行仿真,從而對作戰流程、戰場態勢、作戰結果有具體的認識,為指揮員進行戰斗部署提供直觀的參考。
6 結束語
海戰場自然環境仿真是海戰仿真系統建設與發展的一項基礎工作。本文在分析自然環境仿真特點與需求的基礎上,提出建立基于VR- Forces的海戰仿真系統自然環境通用數據框架,并采用動靜態數據結合及數據多粒度描述的方式進行數據設計及描述。本文研究的內容已初步應用在海戰仿真相關系統研究中。通過對各環境要素進行一致、完整、無歧義的描述,能為仿真系統各模塊開發提供快速構建數據模型的支持,以及為開發同一項目與其他組織機構共享合作提供數據基礎。
[1] 董志明,郭齊勝,黃璽瑛.戰場環境建模與仿真[M].北京:國防工業出版社,2013. DONG Zhi- ming,GUO Qi- sheng,HUANG Xi- ying.Modeling and Simulation of Battlefield Environment[M].Beijing:National Defence Industry Press,2013.
[2] 唐雪梅,李斌.VR- Forces用戶指南[M].北京:國防工業出版社,2012. TANG Xue- mei,LI Bin.VR- Forces User Guide[M].Beijing:National Defense Industry Press,2012.
[3] Jack Cogman.Background,Concepts and Current Status of SEDRIS[DB/OL].(2013- 10- 10)[2016- 11- 18].http:∥www.sedris.com/presentation/ITEC_2005(uk).zip.
[4] 郭剛.綜合自然環境建模與仿真研究[D].長沙:國防科學技術大學,2004. GUO Gang.Research on Synthetic Natural Environment Modeling and Simulation[D].Changsha:National University of Defense Technology,2004.
[5] 王海濱.基于掃描地圖的三維地形仿真[D].南京:南京航空航天大學,2006. WANG Hai- bin.Simulation of 3D Terrain Based on Scanning Map[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.
[6] An Introduction to SEDRIS- Sharing & Reuse of Environmental Data Using SEDRIS Standards[S/OL].(2015- 03- 25)[2016- 03- 12].http:∥www.sedris.org.
[7] Paul Berner,Ph,D.Advanced Application of the DRM Ocean Environment- Mapping to the SEDRIS Data Representation Mode[C]∥SEDRISTM Technology Conference Lake Buena Vista,Florida.January 7,2004.
[8] 馬千里,陸筱霞,徐華勛,等.虛擬作戰空間環境及其數據描述與交換方法研究[J].系統仿真學報,2008,20(9):141-146. MA Qian- li,LU Xiao- xia,XU Hua- xun,et al.Research on the Virtual Battle Space Environment and Its Data Representation and Interchange Method[J].Journal of System Simulation,2008,20 (9):141-146.
[9] 胡艮勝,張國峰.綜合自然環境數據共享技術研究[C]∥系統仿真技術及其應用,2005:719-724. HU Gen- sheng,ZHANG Guo- feng.Synthetic Natural Environment Data Sharing Technology Research[C]∥System Simulation Technology & Application,2005:719-724.
[10] 郭圣威,王云江.海洋大氣環境數據表示和存儲模型[J].系統仿真學報,2010,22 (11):2764-2773. GUO Sheng- wei,WANG Yun- jiang.Representation and Storage Model of Ocean and Atmosphere Environmental Data[J].Journal of System Simulation,2010,22 (11):2764-2773.
[11] 謝孔樹,趙國榮,蔣瀟睿.海戰場自然環境建模與仿真數據模型研究[J].計算機與現代化,2011(11):.51-54. XIE Kong- shu,ZHAO Guo- rong,JIANG Xiao- rui.Research on Naval Battlefield Natural Environment Modeling and Simulation Data Model[J].Computer and Modernization,2011(11):51-54.
[12] 趙鑫,卓力.海洋環境的動態仿真系統研究[J].系統仿真學報,2010,22(7):1618-1621. ZHAO Xin,ZHUO Li.Dynamic Simulation System Based on Marine Environment[J].Journal of System Simulation,2010,22(7):1618-1621.
[13] 謝孔樹,趙國榮,蔣瀟睿,等.一種基于SEDRIS的海戰場自然環境描述方法[J].計算機應用與軟件,2012,29(6):196-198. XIE Kong- shu,ZHAO Guo- rong,JIANG Xiao- rui,et al.A SEDRIS- Based Description Method for Sea Battlefield Natural Environment[J].Computer Applications and Software,2012,29(6):196-198.
[14] 梁浩哲,張軍,廉藺,等.基于SEDRIS的綜合戰場環境數據表示模型[J].計算機與現代化,2008(7):17-22. LIANG Hao- zhe,ZHANG Jun,LIAN Lin,et al.Environment Data Representation Method for Synthetic Battlefield Based on SEDRIS[J].Computer and Modernization,2008(7):17-22.
[15] 胡鵬.仿真綜合集成環境中資源描述方法與技術研究[D].長沙:國防科學技術大學,2010. HU Peng.Method and Technology Research on Resource Description in Synthetic Simulation Integrated Environment[D].Changsha:National University of Defense Technology,2010.
[16] 蔡軍,許麗人.大氣環境仿真的工程化應用研究[J].系統仿真學報,2015,27(1):192-196. CAI Jun,XU Li- ren.Research on Engineering Application of Atmospheric Environment Simulation[J].Journal of System Simulation,2015,27(1):192-196.
[17] 王勃,潘長鵬,張媛,等.VR- Forces開發[M].北京:國防工業出版社,2011. WANG Bo,PAN Chang- peng,ZHANG Yuan,et al.Development of VR- Forces[M].Beijing:National Defense Industry Press,2011.
[18] VT MAK.VR- Forces Developer Guide[K].Revision VRF- 3.12- 2- 090629.
Nature Environment Simulation of General Data Framework for Naval Warfare System
SUN Yong- kan,BAI Yu
(Dalian Naval Academy,Liaoning Dalian 116018,China)
Naval warfare natural environment simulation is an important base for building naval warfare simulation system. The features of natural environment simulation based on multi- granularity for naval warfare are presented based on the analysis of SEDRIS (synthetic environment data representation and interchange specification). A natural environment general data framework of naval warfare simulation system is built. By combining dynamic data and static data or multi data grids, the XML (extensible markup language) of natural environment factors is described. The naval warfare simulation system natural environment data based on VR- Forces (virtual reality forces) are designed. The natural environment general data framework can provide quick data support for the development of all modules of the naval warfare simulation system.
naval warfare simulation; multi granularity;VR- Forces; nature environment simulation; general data framework; data field
2016-03-12;
2016-11-18 作者簡介:孫永侃(1965-),男,浙江義烏人。研究員,博士,主要從事作戰系統仿真。
10.3969/j.issn.1009- 086x.2017.04.030
E843;TP391.9
A
1009- 086X(2017)- 04- 0195- 10
通信地址:116018 大連市中山區解放路667號軟件與仿真研究所張萍萍 E- mail:zpp1975@ 163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
