基于場路耦合的輪轂式開關磁阻電機的電磁性能分析
2017-08-31 19:02:23胡艷芳吳路明
電工技術學報 2017年15期
胡艷芳 丁 文 吳路明
(西安交通大學電氣工程學院 西安 710049)
基于場路耦合的輪轂式開關磁阻電機的電磁性能分析
胡艷芳 丁 文 吳路明
(西安交通大學電氣工程學院 西安 710049)
首先采用有限元法對一臺三相18/24極輪轂式開關磁阻電機(SRM)進行了靜磁場分析,獲得了電機的L-i-θ曲線、T-i-θ曲線、磁化特性曲線以及不同轉子位置下的磁力線和磁通密度分布;接著,在現有文獻的基礎上充分考慮SRM的飽和非線性,采用基于Simplorer與Maxwell場路耦合的聯合仿真方法對電機進行了瞬態場計算,得到了不同運行條件下的電流、電磁轉矩等波形;最后,通過加工樣機測量了電機在起動、穩態運行、加速、減速和變負載等狀態下的實驗波形,其結果與仿真波形吻合較好,驗證了分析方法和結果的有效性。
開關磁阻電機 輪轂電機 電動自行車 場路耦合 Simplorer
0 引言
電機作為電動自行車的主要動力來源,對其性能具有重要影響。同時,考慮到生活實際中的諸多問題,要求用于電動自行車的電機應具有可靠性、變速和成本等方面的優勢[1-3]。
目前,永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)和無刷直流電機(Brushless DC Motor,BLDCM)以其高效率和高功率密度等優勢普遍應用于電動自行車中,但由于永磁體的存在,使得這兩種電機存在磁場調節困難、恒功率范圍窄、永磁材料成本較高等問題[3-6]。而開關磁阻電機(Switched Reluctance Motor,SRM)由于相間電磁耦合較弱,轉子既無永磁體又無繞組,使得其結構較籠型異步電機更為簡單堅固、成本低廉、可靠性高,同時具有起動性能好、調速范圍寬、適合頻繁起停等優點,因此被認為是電動自行車驅動電機的最佳選擇之一[1,7]。
近年來,國內外學者對于電動自行車用開關磁阻電機的研究主要集中在電機的結構設計、分析與優化以及控制系統的設計等方面。文獻[8]設計了一臺用于電動自行車的500 W、500 r/min的三相6/10極外轉子開關磁阻電機,在利用有限元軟件JMAG對電機進行靜態特性分析的基礎上,通過權衡輸出轉矩、轉矩脈動、效率和重量等因素對電機的極弧進行了優化,并通過比較磁鏈和電流的有限元結果和實驗結果對所設計電機的性能進行了初步分析。文獻[9]在分析相數和定、轉子極數對電機性能影響的基礎上,設計了一臺12/16極結構的外轉子SRM,并基于靜態有限元模型對SRM的定、轉子鐵心尺寸進行了優化和繞組方案選擇,最后通過對實驗樣機的測試初步驗證了方案的合理性。文獻[10]在對三相24/16極和四相24/18極兩種SRM結構進行比較分析的基礎上,采用四相結構方案設計一臺400 W、550 r/min的外轉子電機,并測試了驅動系統的空載和負載性能,獲得了平穩的調速特性。文獻[11]應用Ansoft有限元仿真軟件對18/24極和36/24極兩種三相SRM在額定工作點的效率、起動轉矩、效率曲線和過載能力等性能指標進行了對比,并通過實驗驗證了方案的可行性。文獻[12] 介紹了一種用于電動自行車的6/8極結構外轉子SRM的設計過程。該文首先采用PC-SRD程序結合Matlab/Simulink對電機結構參數進行了優化,然后根據選擇的幾何尺寸在有限元分析軟件Flux2D中建立電機的模型,通過對轉矩電流比、轉矩-轉速和電流/功率-轉速曲線的分析來評估電機的性能,為特殊電機的設計和分析提供了有效途徑。在驅動系統方面,文獻[13,14]分別設計了基于單片機和DSC的電動自行車用SRM控制系統的軟、硬件,并對驅動系統進行了實驗,結果均驗證了系統良好的調速性能。文獻[15]選擇了一臺四相24/18極結構的SRM作為電動自行車的驅動電機,為了節約系統成本和體積,采用無中點電容的裂相式主電路作為功率變換器的拓撲,對不同中點電容的中點電壓、電流和效率進行了建模分析和比較,得出采用該拓撲的SRM系統能夠在額定轉速時取得73%的效率,達到了電動自行車的調速要求。
盡管SRM優勢明顯,但強烈的飽和非線性使得對其準確建模和分析較困難。本文旨在現有研究的基礎上,采用基于Simplorer與Maxwell的場路耦合方法對一臺三相18/24極電動自行車用SRM進行電磁性能分析,以盡可能模擬電機的實際運行狀態。場路耦合法是求解驅動電路和電機模型耦合問題的一種方法,現有文獻鮮有采用該方法對輪轂式SRM驅動系統進行性能分析。在進行場路耦合聯合仿真時,Simplorer與Maxwell同時運行,以Simplorer為主控模塊,Maxwell為從屬模塊;在給定的時間步長內,由Simplorer將繞組電流和轉子角度信息傳遞給Maxwell,而Maxwell將繞組反電動勢和電機轉矩傳遞給Simplorer。因此,場路耦合仿真具有較高的計算精度,并能處理復雜的多物理域問題。
1 開關磁阻電機的電磁場計算
1.1 等效電路模型
SRM的運行遵循“磁阻最小原理”,其各相磁鏈、電感和轉矩等參數不僅是電流的函數,而且與轉子位置相關。參考文獻[16],忽略互感影響,SRM的電壓平衡方程式為
(1)
式中,Uk為相繞組電壓;Rk為相繞組電阻;ik為相繞組電流;ψk為相繞組磁鏈;θ為轉子位置角。
進一步,每相磁鏈可表示為
ψk=Lk(θ,i)ik
(2)
將式(2)代入式(1)中,并假定電機以角速度ωm勻速運行,則式(1)可整理為
(3)
式中,等式右側各項依次為線路電阻壓降、感應電動勢和運動電動勢。
根據式(3)可以得出如圖1所示的SRM一相繞組的等效電路。圖1中,ek為運動電動勢,相當于式(3)中等號右側的第三項。
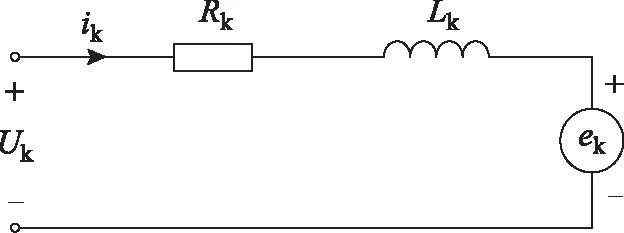
圖1 SRM一相繞組等效電路Fig.1 Equivalent circuit of SRM in one phase winding
根據上述電壓平衡方程,可以推導出任一工作點的瞬時電磁轉矩表達式為
(4)
由于電感和電流受磁場的飽和效應影響,具有強烈的非線性特性,通常難以用解析式表達,因此需要借助數值分析方法獲得。
1.2 磁場計算
磁場強度H和磁感應強度B是進行SRM磁場分析的基本參量。在有限元分析中,引入矢量磁位A求解磁場強度和磁感應強度等物理量,進而可得到磁場能量和磁場力等其他參數。
靜磁場求解中,在庫侖規范下,矢量磁位A滿足微分方程
(5)
式中,J為電流流動截面的電流密度。在有電流分布的區域,J≠0;在無電流分布的區域,J=0。
在求得矢量磁位A后,根據式(6)、式(7)可得到磁感應強度B和磁場強度H分別為

(6)
(7)
瞬態磁場中,有限元模型中各點的矢量磁位A可通過運動方程(8)求得。
(8)
式中,Js為源電流密度;σ為導體電導率;v為運動物體的速度;Hc為鐵磁材料的矯頑力。
2 輪轂式開關磁阻電機有限元仿真
參考現有電動自行車用電機的主要參數以及開關磁阻電機的設計原則,本文利用通用有限元分析軟件設計了一臺PN=350 W、nN=400 r/min的三相輪轂式開關磁阻電機,其主要電氣參數和結構參數列于表1。其中,定、轉子極數分別為18和24,每相繞組包含6個線圈。圖2分別為輪轂式SRM的Maxwell3D模型和定子一相繞組連接圖。
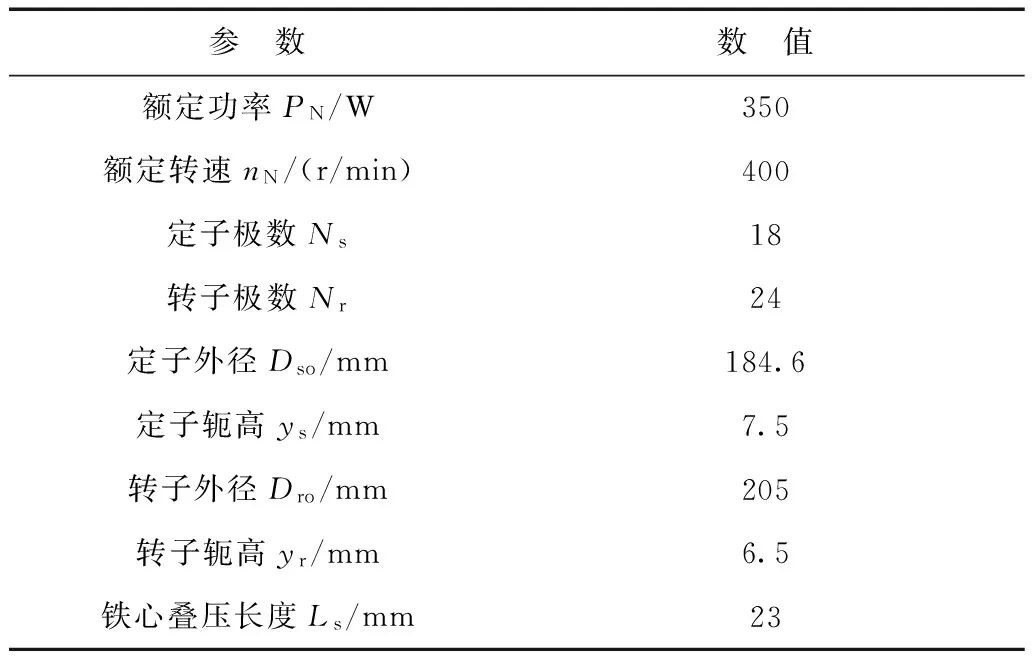
表1 輪轂式SRM主要參數Tab.1 The main parameters of in-wheel SRM

圖2 電機模型及繞組連接Fig.2 The model and winding connection
2.1 靜態電磁特性分析
SRM的磁場具有典型的飽和非線性特性,各相電感和轉矩是繞組電流i和轉子位置θ的函數。靜態電磁仿真的目的是通過計算電感/轉矩-電流-轉子位置特性曲線來預測電機的運行性能,并為電機的結構優化和控制奠定基礎。
圖3分別為一個轉子極距內繞組電流從0 A增加到40 A時的電感特性曲線L(i,θ)、轉矩特性曲線T(i,θ)和磁化特性曲線。
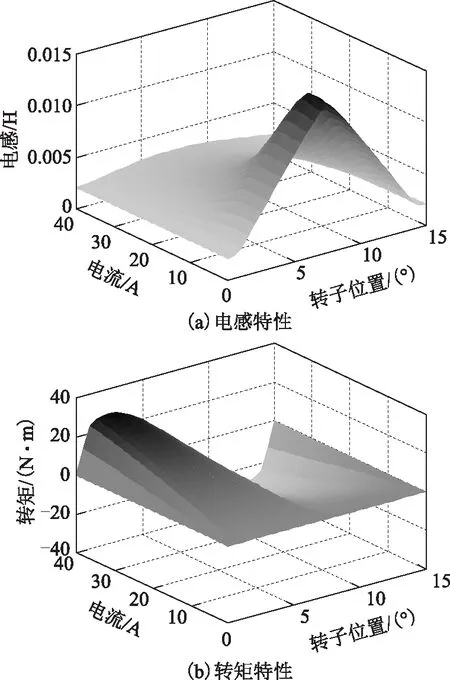
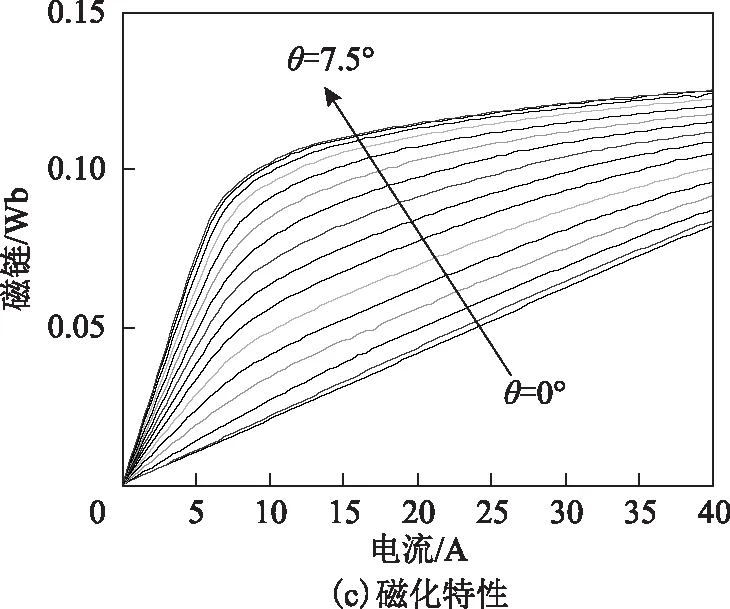
圖3 18/24極輪轂式SRM的相電感、轉矩和磁化特性Fig.3 Phase inductance,torque and magnetization characteristics of 18/24 poles in-wheel SRM
從圖3a中可以看出,在相同電流值下,電機自磁阻最大位置(θ=0°)向磁阻最小位置(θ=7.5°)運動時,由于磁阻減小,鐵心中磁通量增加,使得電感值也逐漸增大;而相同位置時磁通的增加速率小于電流的增長速率,使得電感值隨電流的增加而減小。根據式(4),轉矩與電流的二次方和電感的變化率正相關,因此,在電感曲線上升階段,電流增加,轉矩正向增大,在θ=2.5°前后達到最大值,電機處于電動狀態;在電感曲線下降階段,電流增加,轉矩反向增大,在θ=10°前后達到最大值,電機處于發電狀態。從圖3c中可以看出,在磁阻最大位置(θ=0°)磁動勢主要降落在氣隙段,磁化曲線呈線性增長;當轉子運動到接近磁阻最小位置(θ=7.5°)時,隨著鐵心中的磁阻在磁路中總磁阻的比例增加,電機逐漸趨于飽和,當I>15 A時,磁鏈不再隨電流上升而明顯增加。
圖4分別為繞組電流為15 A時,電機在一相繞組的磁阻最大位置時的磁力線和磁通密度分布以及磁阻最小位置時的磁力線和磁通密度分布。從圖中可以看出,磁通路徑為短磁路,在磁阻最大位置和磁阻最小位置時電機鐵心的最大磁通密度分別約為1 T和1.8 T,在合理范圍內。


圖4 18/24極輪轂式SRM在兩個典型位置的磁力線和磁通密度分布情況Fig.4 The flux linkage and magnetic flux dense distribution at two typical positions of 18/24 poles in-wheel SRM
2.2 基于Simplorer與Maxwell的瞬態磁場仿真
在Simplorer中搭建如圖5所示的基于不對稱功率變換電路的聯合仿真系統模型,分別對電機進行起動、穩態及調速運行的仿真。
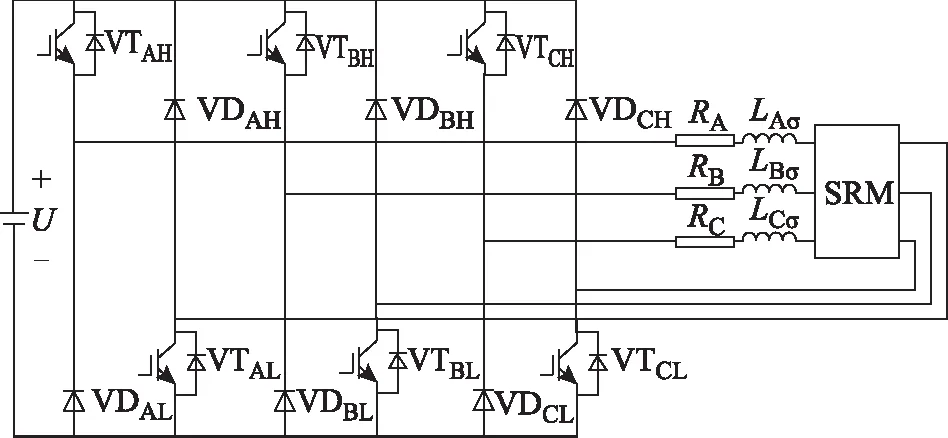
圖5 基于Simplorer與Maxwell的18/24極輪轂式SRM場路耦合聯合仿真系統示意圖Fig.5 The system diagram of field-circuit coupling co-simulation based on Simplorer and Maxwell for 18/24 poles in-wheel SRM
首先對額定電壓下的起動過程進行仿真。假設初始時刻轉子位于某相繞組的磁阻最大位置,額定電壓下帶額定負載運行時的轉速和電流波形如圖6所示。從圖中可以看出,初始起動階段電流和電磁轉矩迅速上升,轉速也逐步升高,并最終穩定在400 r/min附近,同時電磁轉矩和三相電流幅值也趨于穩定,此時起動過程完成,電機進入穩態運行。但由于SRM磁阻性質的轉矩使得其轉矩脈動明顯,從而造成轉速和電流波形有一定程度的波動。
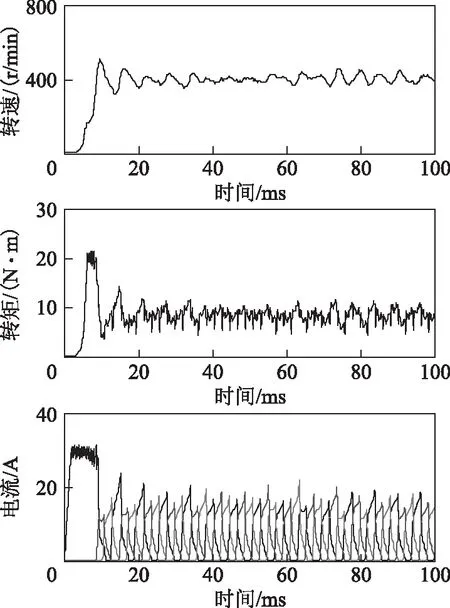
圖6 電機起動仿真結果Fig.6 Results of starting-up simulation
圖7為額定電壓和額定轉速下,開關角度為-1°~5° 時的穩態轉矩和電流波形的放大圖。經計算,平均輸出轉矩Tav=9.48 N·m,相電流有效值約為 9.85 A,轉矩脈動率約為96.85%。可見,在該運行狀態下,輸出轉矩能夠達到運行要求。


圖7 穩態運行時的轉矩和電流波形Fig.7 The steady-state torque and current waveforms
改變轉速以模擬系統變速運行時的狀態。圖8為額定電壓下,電機分別在40 ms和80 ms時由200 r/min連續升高100 r/min時的穩態轉矩和電流波形。結果表明,隨著轉速的升高,電機的輸出轉矩和電流也相應減少。因此,在電機低速運行時,為避免電流過大損壞電機或系統,通常需要對電流加以限制。
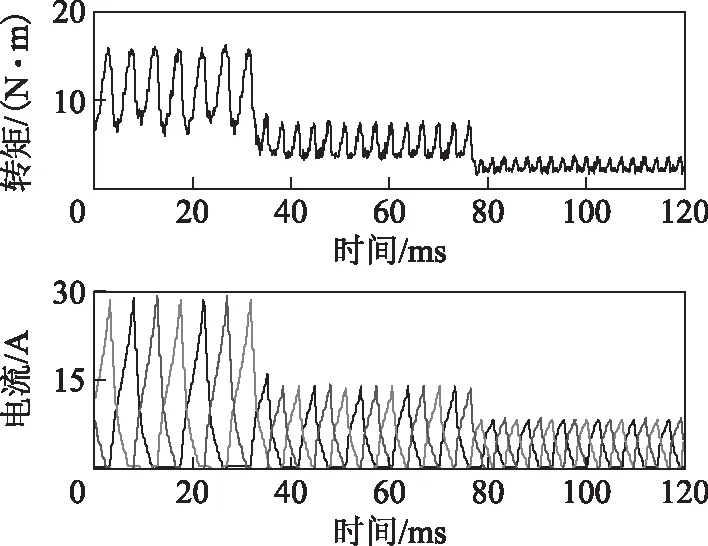
圖8 不同轉速下的穩態轉矩和電流波形Fig.8 The steady-state torque and current waveforms at variable speed
在控制電路中加入電流斬波單元,測試系統在電流斬波控制(Current Chopping Control,CCC)下的穩態轉矩和電流波形如圖9所示。從圖中可看出,電流限幅為10 A時的電機平均輸出轉矩約為4.8 N·m,轉矩脈動率約為88.77%,較開環穩態運行時兩者均有所降低。

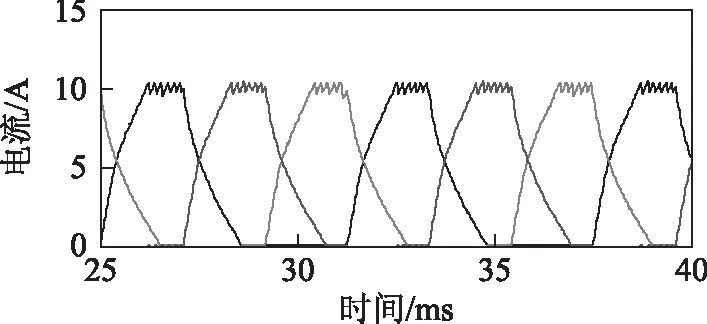
圖9 電流斬波控制下的穩態轉矩和電流波形Fig.9 The steady-state torque and current waveforms under current chopping control
注意到,雖然采用CCC后電機的轉矩脈動有所減小,但依然較電磁式電機大。這是因為電流斬波控制是通過將電流幅值限制在一定范圍內來控制輸出轉矩的,但在電感開始上升和定、轉子磁極中心線重合位置前后,電流幅值偏小,導致電機各相在開始導通和續流階段轉矩輸出也較小,因而雖然這種方法能夠在一定程度上減小導通相的轉矩脈動,但換相過程中的轉矩脈動不能得到很好地抑制,需要引入轉矩反饋并采用更為有效的轉矩控制策略來實現,這些將在以后的工作中討論。
3 實驗測試驅動系統實驗
3.1 系統硬件平臺
圖10分別為18/24極外轉子開關磁阻電機的實驗樣機和基于STM32F103控制器的驅動系統示意圖。

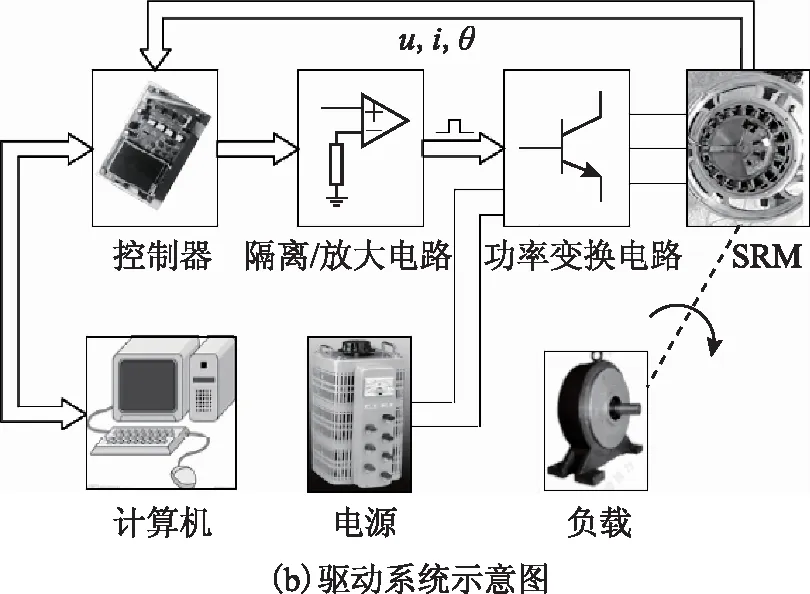
圖10 18/24極輪轂式SRM原理樣機及系統示意圖Fig.10 The prototype and system diagram of 18/24 poles in-wheel SRM
3.2 實驗結果及分析
在系統實驗平臺上分別對電機進行起動、穩態運行、調速和變負載運行性能的測試。
3.2.1 起動和穩態運行實驗
設置參考轉速為400 r/min,開關角度為0°~5°,帶負載閉環起動時的轉速和電流波形如圖11a、圖11b所示。從圖中可以觀察到,電機轉速快速上升,經過1 s左右穩定在400 r/min附近,此時三相電流也達到穩定狀態。圖11c示出了該狀態下穩態相電流的測量值和仿真值的對比情況。通過比較結果可以看出,仿真電流的幅值和波形均與實驗結果吻合較好,驗證了聯合仿真模型和結果的準確性。
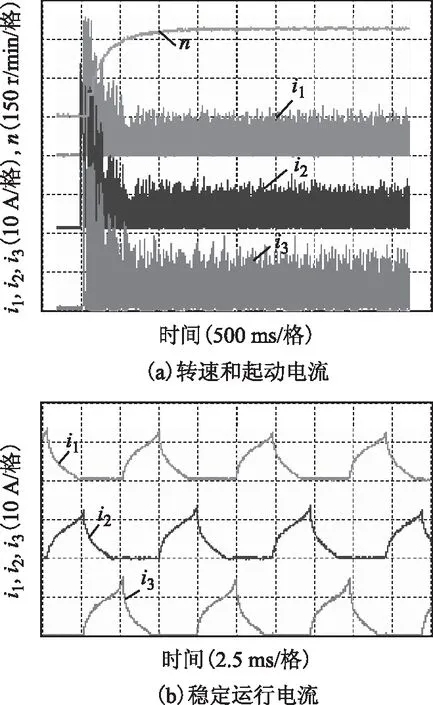

圖11 起動實驗結果Fig.11 Results of starting-up experiment
圖12為電機帶60%額定負載閉環運行于300 r/min時,各相電流測量結果與仿真結果的對比。從圖中可以看出仿真結果與實驗波形基本一致。
3.2.2 變速運行
圖13分別為電機帶80%額定負載條件下的加速和減速實驗波形。其中,圖13a為從200 r/min先加速到300 r/min并維持一段時間后又繼續加速到400 r/min 時的轉速和電流波形;圖13b為從400 r/min先減速到300 r/min并維持一段時間后又繼續減速到200 r/min時的轉速和電流波形。
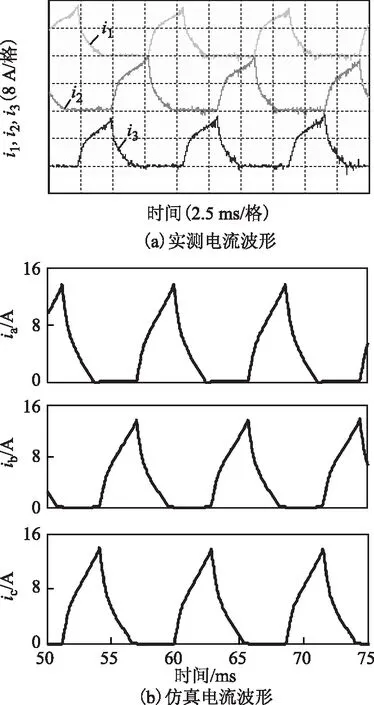
圖12 轉速閉環控制時實測電流與仿真電流對比Fig.12 Comparison of measured current and simulated current under the speed-closed loop control

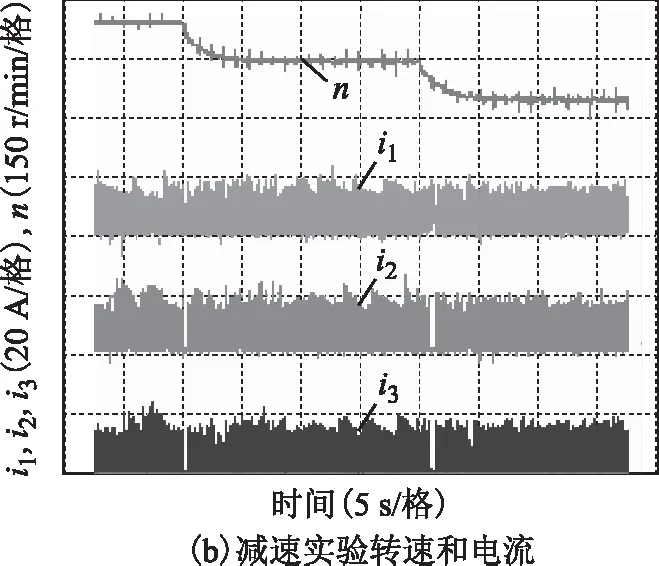
圖13 變速實驗結果Fig.13 The results of variable-speed experiments
從實驗結果可以看出:電機在不同轉速下均運行平穩;變速過程中轉速響應較快、過渡時間較短;同時,由于運行過程中負載轉矩保持不變,使得電機各相電流幅值也沒有明顯變化。
3.2.3 變負載運行
在轉速閉環控制方式下設定參考轉速為 400 r/min,改變電機負載時的實驗結果如圖14所示。其中,圖14a為某一時刻由40%額定負載增加一倍時的轉速和三相電流波形;圖14b為相反過程,即在某一時刻由80%額定負載減少一半時的轉速和三相電流波形。

圖14 變負載實驗結果Fig.14 The results of load adjustment experiments
從圖14中可以觀察到:當突增負載時,電機各相電流迅速增加,但由于機械慣性的作用,電機轉速出現略微降低,之后隨著電流和電磁轉矩的增加又恢復到給定轉速;當突減負載時,各相電流迅速減小,同樣由于機械慣性的作用,電機轉速略微升高后又恢復到給定轉速。
4 結論
本文首先通過靜磁場有限元計算,分析了一臺三相18/24極電動自行車用輪轂式SRM的電感特性曲線L(i,θ)、轉矩特性曲線T(i,θ)和磁化特性。建立了基于Simplorer與Maxwell場路耦合的聯合仿真模型,對電機的瞬態運行特性進行了仿真,通過計算電機的起動、穩態、變速以及CCC下的電機電流、轉矩等參量,分析了電機在上述不同運行狀態下的性能。最后,通過加工原理樣機并搭建硬件實驗平臺測量了起動、穩態、變速和變負載運行下的電機轉速和電流波形,其結果與仿真結果基本一致,驗證了仿真模型和結果的有效性。
[1] 鄭萍,崔淑梅,宋立偉,等.電動車用電機的發展趨勢[J].微電機,1997,30(3):18-21.ZhengPing,CuiShumei,SongLiwei,etal.Developingtendencyofmotorinelectricallyoperatedvehicle[J].Micromotor,1997,30(3):18-21.
[2]TrifaV,CistelecanM,MargineanC.Directelectricin-wheeldrivingofabicycleusingreluctantmotors[C]//InternationalAegeanConferenceonElectricalMachinesandPowerElectronics(ACEMP′07),2007:17-20.
[3] 褚文強,辜承林.電動車用輪轂電機研究現狀與發展趨勢[J].電機與控制應用,2007,34(4):1-5.ChuWenqiang,GuChenglin.Applicationstatusanddevelopingtendofin-wheelmotorsusedforelectricautomobile[J].ElectricMachinesandControlApplication,2007,34(4):1-5.
[4] 游琳娟,吳漢光,雷德森.電動車電機及其控制技術的發展[J].中小型電機,2001,28(1):35-38.YouLinjuan,WuHanguang,LeiDesen.Developmentofelectricalvehiclemotorandcontroltechnology[J].S&MElectricMachines,2001,28(1):35-38.
[5]StarschichE,MuetzeA.Comparisonoftheperformanceofdifferentgearedbrushless-DCmotordrivesforelectricbicycles[C]//IEEEInternationalElectricMachines&DrivesConference,Antalya,Turkey,2007:140-147.
[6]ChleboszW,OmbachG,JunakJ.Comparisonofpermanentmagnetbrushlessmotorwithouterandinnerrotorusedine-bike[C]//2010XIXInternationalConferenceonElectricalMachines,Rome,Italy,2010:1-5.
[7] 楊朝輝,杜曉平.車用電動機的發展現狀及趨勢[J].汽車實用技術,2015(9):163-164.YangZhaohui,DuXiaoping.Thecurrentanddevelopmentstatusofmotorforvehicle[J].AutomobileAppliedTechnology,2015(9):163-164.
[8]LinJianing,SchofieldN,EmadiA.External-rotor6-10switchedreluctancemotorforanelectricbicycle[J].IEEETransactionsonTransportationElectrification,2015,1(4):348-356.
[9] 花為,華浩,趙桂書,等.一種用于電動自行車的高性能開關磁阻電機系統[J].南京航空航天大學學報,2014,46(1):37-43.HuaWei,HuaHao,ZhaoGuishu,etal.High-performanceswitchedreluctancemachineforelectricbicycle[J].JournalofNanjingUniversityofAeronautics&Astronautics,2014,46(1):37-43.
[10]吳玉飛.電動自行車用四相SR電機驅動系統的研究[D].南京:南京航空航天大學,2012.
[11]顧俊.18/24結構電動自行車開關磁阻驅動電機的研究[D].南京:南京航空航天大學,2012.
[12]KerdsupB,FuengwarodsakulNH.Simulationsoftwaretoolsfordesigningswitchedreluctancemotorinelectricbicycles[J].The9thInternationalConferenceonElectricalEngineering/Electronics,Computer,Telecom-municationsandInformationTechnology,2012:1-4.
[13]周濤.電動自行車用開關磁阻電機驅動系統的研究與實踐[D].武漢:華中科技大學,2006.
[14]盧銘.電動自行車用開關磁阻電機驅動系統的研究[D].南京:南京航空航天大學,2008.
[15]朱學忠,王云林,張磊,等.四相無中點電容裂相式開關磁阻電機驅動系統研究[J].中國電機工程學報,2014,34(33):5918-5924.ZhuXuezhong,WangYunlin,ZhangLei,etal.Afour-phaseswitchedreluctancedrivesysteminthesplit-phaseconverterwithoutcapacitors[J].ProceedingsoftheCSEE,2014,34(33):5918-5924.
[16]高潔,孫鶴旭,米彥青,等.計及互感的開關磁阻電機單雙相勵磁靜態性能分析[J].電機與控制學報,2012,16(11):45-51.GaoJie,SunHexu,MiYanqing,etal.StaticperformanceanalysisofSRmotorwithsingleanddoublephaseexcitationconsideringmutualinductance[J].ElectricMachinesandControl,2012,16(11):45-51.
(編輯 于玲玲)
Analysis of Electromagnetic Performances on an In-Wheel Switched Reluctance Motor Based on Field-Circuit Coupling
HuYanfangDingWenWuLuming
(School of Electrical Engineering Xi′an Jiaotong University Xi′an 710049 China)
The magnetostatics calculation is firstly carried out for an in-wheel SRM with three phases and 18/24 poles and several performances are obtained,includingL-i-θ,T-i-θ,magnetization characteristics,the distributions of flux linkage and magnetic flux density at different rotor positions.Then the saturation and nonlinear characteristics of SRM are taken into consideration,and co-simulation of field-circuit coupling method based on Simplorer and Maxwell are applied for the SRM to analyze the transient performances and the current and torque curves under various conditions are also presented.Finally,a prototype is manufactured and the experimental waveforms are measured ranging from starting-up,steady operation,variable-speed to load adjustment.The consistent results between simulated and measured waveforms verify the validity of the method and its results.
Switched reluctance machine,in-wheel motor,electric bicycle,field-circuit coupling,Simplorer
國家自然科學基金項目資助(51477130)。
2016-08-12 改稿日期2017-01-01
10.19595/j.cnki.1000-6753.tces.L70146
TM352
胡艷芳 女,1987年,博士研究生,研究方向為開關磁阻電機及其控制。
E-mail:green_mimosa@stu.xjtu.edu.cn(通信作者)
丁 文 男,1981年,副教授,博士生導師,研究方向為特種電機運行理論及控制。
E-mail:wending@mail.xjtu.edu.cn