裝載機鏟斗外載荷識別模型與試驗研究
2017-08-31 22:31:08陸永能員征文朱述敏趙云亮宋緒丁郁錄平
筑路機械與施工機械化 2017年5期
關(guān)鍵詞:模型
陸永能,員征文,朱述敏,徐 雷,趙云亮,宋緒丁,郁錄平
(1.徐工集團江蘇徐州工程機械研究院,江蘇徐州 221004;2.徐工集團高端工程機械智能制造國家重點實驗室,江蘇徐州 221004;3.長安大學工程機械學院,陜西西安 710064)
裝載機鏟斗外載荷識別模型與試驗研究
陸永能1,2,員征文1,2,朱述敏1,2,徐 雷1,2,趙云亮1,2,宋緒丁3,郁錄平3
(1.徐工集團江蘇徐州工程機械研究院,江蘇徐州 221004;2.徐工集團高端工程機械智能制造國家重點實驗室,江蘇徐州 221004;3.長安大學工程機械學院,陜西西安 710064)
為了獲得裝載機作業(yè)過程中受到的真實外載荷,基于理論力學和信號測試技術(shù),以裝載機鏟斗為研究對象,建立工作裝置外載荷識別理論模型.結(jié)合信號采集儀器搭建載荷測試系統(tǒng),對工作裝置進行靜態(tài)加載試驗.結(jié)果表明:測試系統(tǒng)所得載荷的相對誤差在5%以內(nèi),角度偏差在3°以內(nèi),滿足工程應(yīng)用要求;可以有效地解決裝載機外載荷獲取問題,為裝載機的結(jié)構(gòu)設(shè)計和優(yōu)化提供數(shù)據(jù)支撐.
裝載機;工作裝置;鏟斗;載荷識別
0 引 言
輪式裝載機廣泛應(yīng)用于露天礦、市政建設(shè)、筑壩修道、港口和大型轉(zhuǎn)運站等場所,進行裝卸料、推土、轉(zhuǎn)運和淺層挖掘等多種作業(yè).工作裝置是裝載機作業(yè)的執(zhí)行部件,其性能好壞直接影響到裝載機作業(yè)效用的發(fā)揮.由于裝載機的作業(yè)對象復(fù)雜多樣,作業(yè)環(huán)境惡劣,工作裝置受到的載荷變化劇烈,經(jīng)常發(fā)生損壞,增加工程施工的困難.
為了改善工作裝置的使用性能,提高使用壽命,需要對工作裝置受到的載荷進行全面研究.學者們對此進行了大量的理論研究.文獻[1-4]基于機械系統(tǒng)動力學軟件ADAMS,通過理論分析,模擬裝載機在工作過程中的姿態(tài)和受到的載荷,并進行參數(shù)化建模,對工作裝置的鉸點和結(jié)構(gòu)進行優(yōu)化.文獻[5-6]基于靜力學分析對工作裝置的偏載工況進行了受力分析和計算,得出極限載荷下各鉸點的受力情況,找出危險點和應(yīng)力集中區(qū),為工作裝置的優(yōu)化設(shè)計提供了依據(jù).文獻[7]在遺傳算法全局優(yōu)化理論的基礎(chǔ)上建立數(shù)學模型,對工作裝置進行優(yōu)化設(shè)計,再通過動力學仿真軟件,對優(yōu)化后的工作裝置進行虛擬樣機試驗驗證.文獻[8]利用試驗分析了鏟斗油缸的峰值載荷,并進行試驗驗證和參數(shù)化建模仿真分析,為工作裝置的疲勞壽命和作業(yè)舒適性研究打下了一定的基礎(chǔ).
由上述文獻可知,在進行裝載機工作裝置設(shè)計和優(yōu)化時,大多數(shù)研究工作都是在對裝載機作業(yè)過程和所受載荷的理論分析、模擬的基礎(chǔ)上開展的,而這與裝載機實際的作業(yè)過程和所受載荷有一定差距,所得到的研究結(jié)果不能精確地反映裝載機工作裝置的實際載荷特性.本文對裝載機工作裝置進行系統(tǒng)的受力分析,并建立鏟斗外載荷識別模型;考慮裝載機鏟斗的結(jié)構(gòu)特點,設(shè)計鏟斗外載荷測試傳感器,并搭建外載荷測試系統(tǒng);最后用靜態(tài)加載試驗驗證該模型的準確性.
1 裝載機工作裝置結(jié)構(gòu)及受力分析
裝載機工作裝置主要由動臂、搖臂、鏟斗、拉桿4個部分組成.當裝載機進行鏟裝作業(yè)時,搖臂油缸的伸縮可以使力通過搖臂傳遞給拉桿,拉桿帶動鏟斗繞動臂鉸點擺動;動臂油缸的伸縮可以使整個工作裝置繞前車架轉(zhuǎn)動,實現(xiàn)物料提升[9-12].只要獲得與鏟斗相連的3個鉸點處的載荷,即可獲得整個工作裝置所受外載荷.
以鏟斗為研究對象,將鏟斗所受外載荷等效到斗尖,則鏟斗受到的載荷為Fx、Fy、Fz,力矩為Mx、My、Mz;與該外載荷平衡的3個鉸點處的載荷分別為Fy1、Fz1、Fy2、Fz2、Fy3、Fz3、F4L、F4R,如圖1所示.圖中x1、x2、y1、y2、z1、z2為鏟斗局部坐標系下各鉸點坐標.據(jù)據(jù)靜力平衡和力矩平衡,外載荷與鉸點載荷存在如下關(guān)系
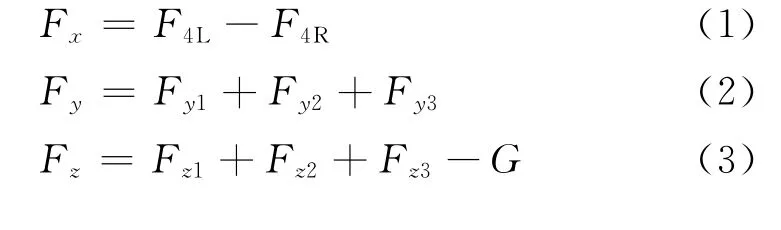
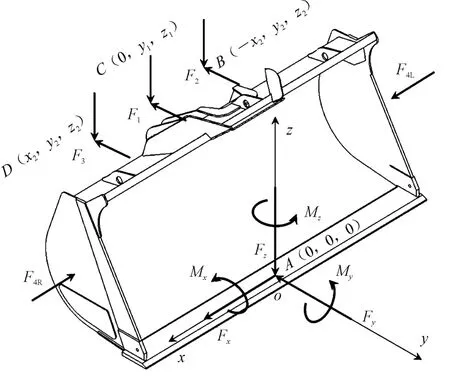
圖1 鏟斗受力分析
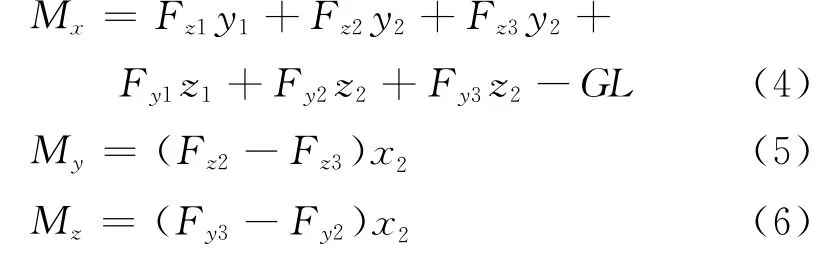
式中:G為鏟斗重力;L為鏟斗坐標系下鏟斗重心與斗尖載荷作用點沿y軸的距離.
為方便計算,將以上各式整理成矩陣形式
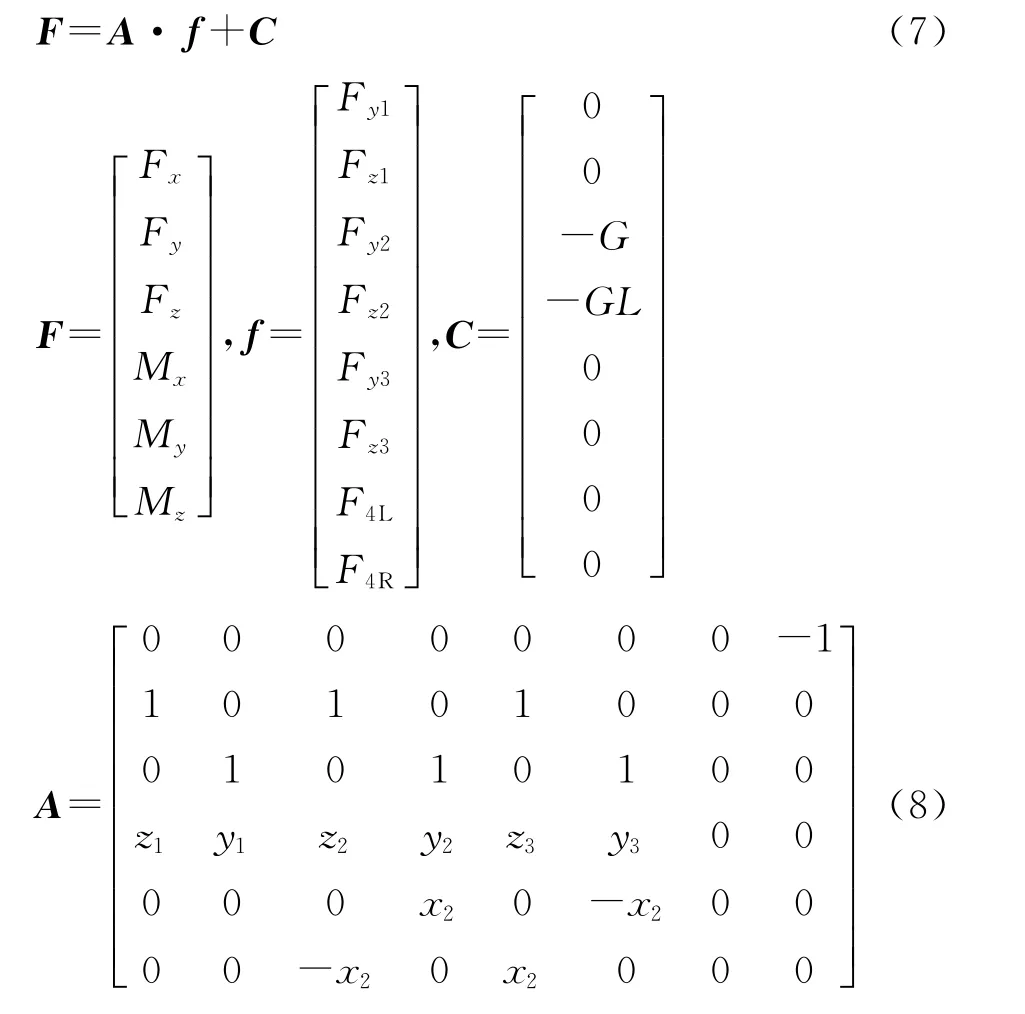
由上述推導(dǎo)可知,只要獲得鏟斗鉸點載荷Fy1、Fz1、Fy2、Fz2、Fy3、Fz3、F4L、F4R,即可得到裝載機工作過程中的斗尖外載荷.
2 裝載機載荷測試模型
2.1 鏟斗拉桿鉸點載荷的獲取
為獲得鏟斗與拉桿連接處的鉸點載荷Fy1、Fz1,將拉桿視為只受軸向拉壓載荷的二力桿,在裝載機拉桿側(cè)面粘貼應(yīng)變片組成全橋系統(tǒng),制成拉桿力傳感器,用于測量拉桿在工作過程中的受力大小.貼片和橋路布置如圖2所示.
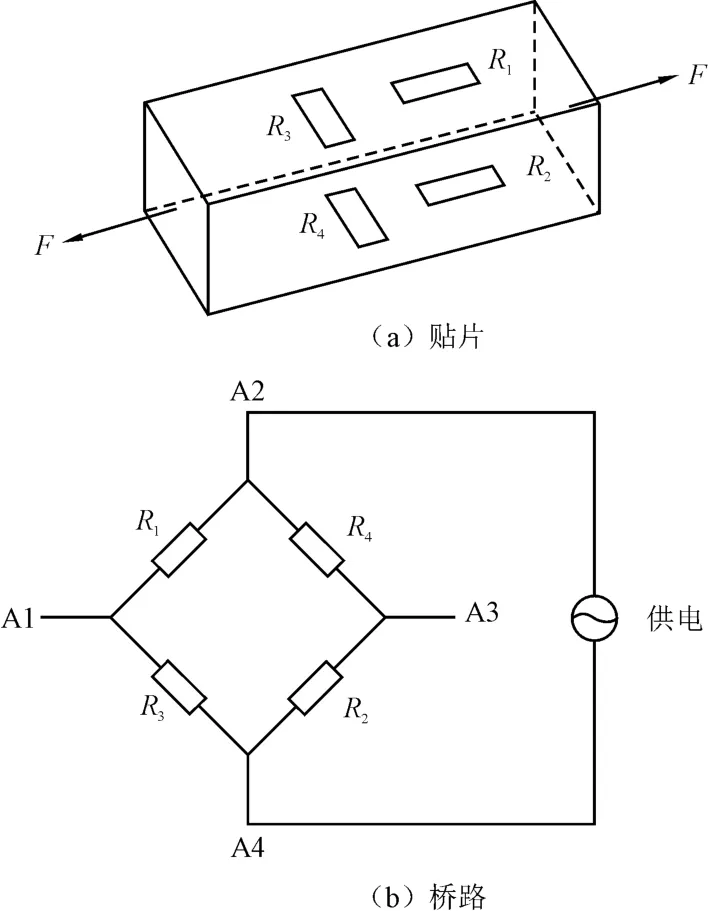
圖2 拉桿貼片及橋路布置
為獲得鏟斗與動臂連接處的鉸點載荷Fy2、Fz2、Fy3、Fz3、F4L、F4R,設(shè)計2個銷軸傳感器(圖3),分別安裝在動臂左、右鉸接點.傳感器的一端固定在鏟斗鉸接耳板上,另一端與動臂鉸接,可同時獲取側(cè)向載荷F4L、F4R和軸向載荷Fy2、Fz2、Fy3、Fz3.
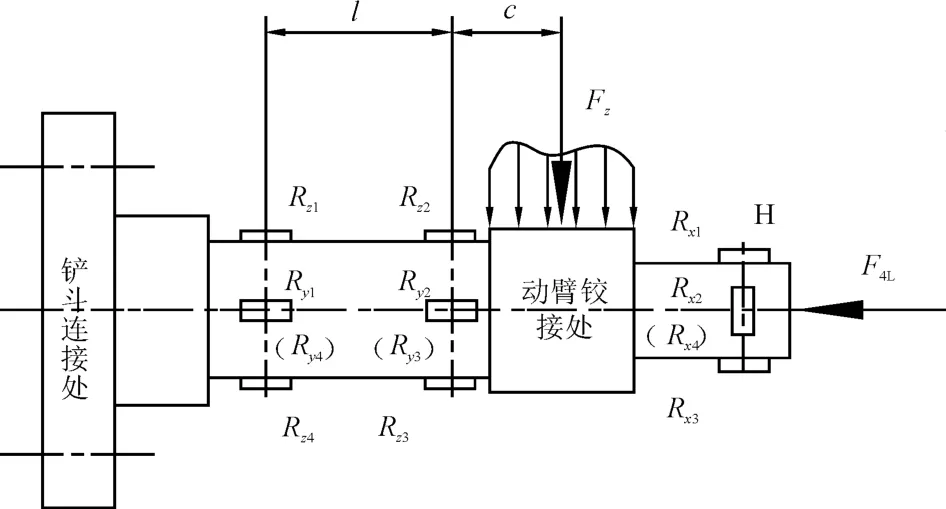
圖3 銷軸傳感器
2.2 鏟斗動臂鉸點徑向載荷的獲取
由于裝載機實際作業(yè)中動臂鉸接點處的載荷作用點不固定,為消除該因素,特采用差動電橋的布片方案.在銷軸傳感器x軸的縱斷面貼應(yīng)變片Rz1、Rz2、Rz3、Rz4,組橋方式如圖4所示.根據(jù)應(yīng)變測量和材料力學的相關(guān)原理,在供橋電壓為Ui的條件下,電橋的輸出電壓為

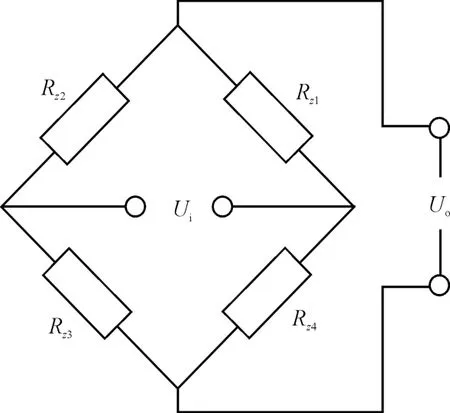
圖4 Fz測量電橋
式中:K為應(yīng)變片的靈敏度系數(shù);E為材料彈性模量;Wp為抗彎截面系數(shù).
由式(9)可以看出,電橋的輸出電壓Uo與力的作用點位置無關(guān),也就是說,不論Fz在支承點的分布特性怎樣變化,這種組橋方式都能從理論上準確地測量出Fz的數(shù)值.
2.3 鏟斗動臂鉸點側(cè)向載荷的獲取
從圖3可以看出,鏟斗向左的側(cè)向力F4L作用在銷軸傳感器頂端,傳感器的斷面面積比較小,F4L會產(chǎn)生壓應(yīng)力.在H斷面上,貼應(yīng)變片Rx1、Rx2、Rx3、Rx4,組橋方式如圖5所示.
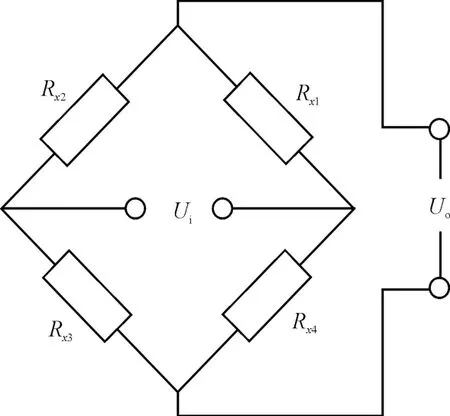
圖5 側(cè)向力測量電橋
在供橋電壓為Ui的條件下,圖5中電橋的輸出電壓為

式中:S為Rx1~Rx4所在位置的傳感器斷面面積;μ為泊松比.
2.4 工作裝置空間姿態(tài)參數(shù)的獲取
在外載荷識別模型中,鏟斗鉸點載荷處在鏟斗局部坐標系,而在鏟裝作業(yè)的過程中,鏟斗局部坐標系會不斷改變.要獲得全局坐標系下的外載荷,就要找到局部坐標系與全局坐標系之間的關(guān)系.在由鏟斗、拉桿、搖臂、動臂組成的兩自由度空間桿系結(jié)構(gòu)中,只要得到動臂油缸和搖臂油缸的位移,便可以確定該系統(tǒng)的空間姿態(tài),進而確定鏟斗坐標系與全局坐標系的關(guān)系.因此,在動臂油缸和搖臂油缸處布置拉線式位移傳感器以獲取2處位移.為驗證該載荷測試系統(tǒng)的精度,在動臂油缸處布置油壓傳感器以獲得該鉸點載荷.載荷測試系統(tǒng)如圖6所示.
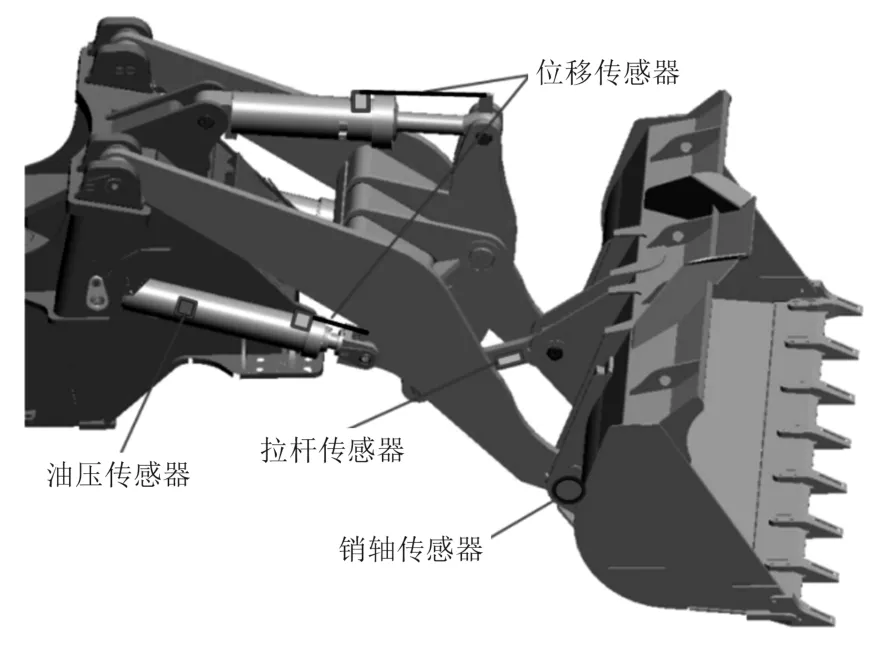
圖6 載荷測試系統(tǒng)
3 裝載機外載荷測試系統(tǒng)的驗證
為考察該測試系統(tǒng)及理論模型的準確性,采用靜態(tài)加載試驗的方式進行驗證[13-15].由于5 t裝載機鏟掘物料一般力的大小在50~70 k N,所以選取的加載重物分別為5、6、7 t.裝載機在整個作業(yè)過程中主要經(jīng)歷鏟掘、運輸、舉平、卸料等姿態(tài),故取幾個典型姿態(tài)進行靜載試驗(圖7).試驗步驟如下.
(1)鏟斗空載并控制搖臂旋轉(zhuǎn)鏟斗到姿態(tài)1(鏟掘姿態(tài)),緩慢抬升動臂,當抬升至下鉸接點距地面400 mm時保持姿態(tài)不變,記錄各傳感器示數(shù).
(2)鏟斗加載重塊到步驟(1)同一姿態(tài),記錄各傳感器示數(shù).
(3)將裝載機姿態(tài)變換到姿態(tài)2(運輸姿態(tài))、姿態(tài)3(平舉姿態(tài))、姿態(tài)4(卸料姿態(tài)),分別重復(fù)步驟(1)、(2).
(4)對重塊進行稱重,測試精度為10 kg.
(5)通過懸掛法測定重物重心位置.
試驗結(jié)果如表1所示.由表1可知,不同鏟斗姿態(tài)和不同外載荷下,裝載機外載荷識別模型計算載荷大小的相對誤差都在5%以內(nèi),角度偏差在3°以內(nèi),滿足工程應(yīng)用要求.
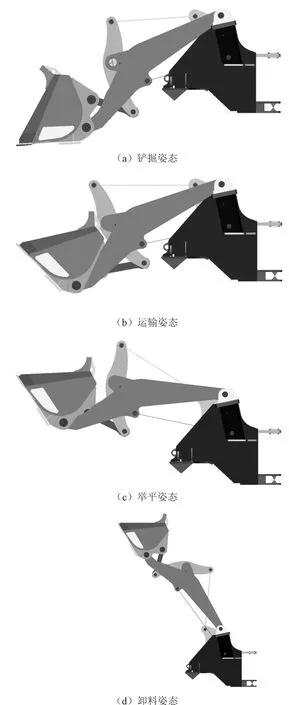
圖7 靜載試驗姿態(tài)
4 結(jié) 語
(1)通過對裝載機工作裝置進行受力分析,將鏟斗所受外載荷簡化到斗尖上的6階張量,基于力學平衡方程,得到外載荷的6階張量與鏟斗3個鉸點力之間的數(shù)學關(guān)系及相關(guān)系數(shù)矩陣,從而建立了鏟斗外載荷識別理論模型;基于鏟斗各鉸點處結(jié)構(gòu)特點,設(shè)計相應(yīng)鉸點處的載荷采集傳感器,并結(jié)合信號采集儀,搭建了基于鏟斗外載荷識別理論模型的載荷測試系統(tǒng),該模型可以很好地解決變姿態(tài)下工作裝置外載荷的識別計算問題.這套方法可以為類似工程車輛的載荷獲取提供思路.
(2)在不同工作姿態(tài)和不同外載荷下對工作裝置進行靜載荷試驗.結(jié)果表明,裝載機外載荷識別模型計算載荷的相對誤差在5%以內(nèi),角度偏差在3°以內(nèi),滿足工程應(yīng)用要求.本文提出的裝載機外載荷識別模型及測試系統(tǒng)的建立可有效解決裝載機外載荷獲取問題,為裝載機的結(jié)構(gòu)設(shè)計和優(yōu)化提供數(shù)據(jù)支撐.
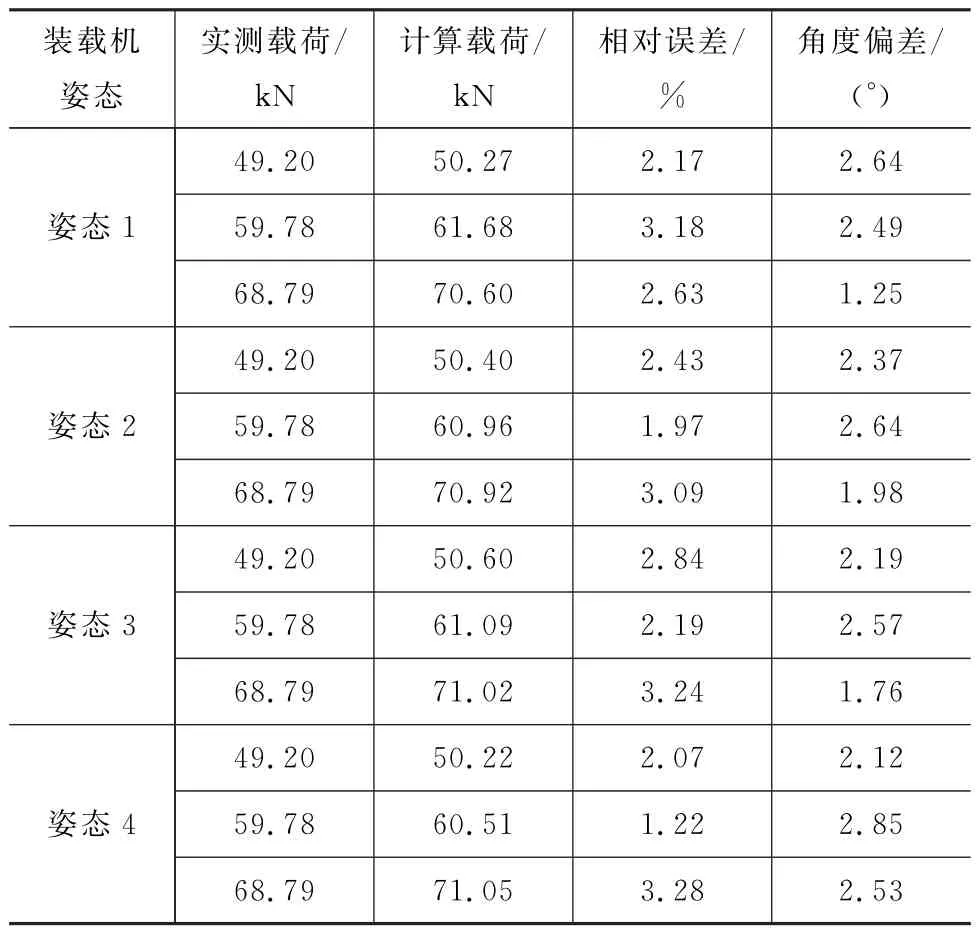
表1 靜載驗證試驗結(jié)果
[1] 魏加潔,朱艷平.基于ADAMS的裝載機工作裝置開發(fā)[J].建筑機械,2010(9):93-96.
[2] 何孔德,方子帆.基于虛擬樣機技術(shù)的裝載機工作裝置優(yōu)化設(shè)計[J].拖拉機與農(nóng)用運輸車,2010,37(3):97-99.
[3] 張雪華.基于ADAMS的ZL-50型裝載機工作裝置的優(yōu)化[J].礦山機械,2011,39(6):44-48.
[4] 遲春燕.80型輪式裝載機結(jié)構(gòu)系統(tǒng)動力特性研究[D].長春:吉林大學,2013.
[5] 許立太,李海寧,王強峰,等.基于Matlab的裝載機工作裝置受力分析[J].機械設(shè)計,2011,28(10):82-85.
[6] 孫寶玉,張福生,吳 兵.新型裝載機工作裝置受力及有限元分析[J].太原科技大學學報,2011,32(3):220-223.
[7] 申軍立,姚宗偉,張 雁.大型裝載機工作裝置遺傳算法優(yōu)化與仿真[J].建筑機械,2011(11):115-120.
[8] 史英良,侯 亮,祝青園.基于工作裝置優(yōu)化的裝載機卸載沖擊研究[J].中國工程機械學報,2016,14(1):44-49.
[9] 曹旭陽,王國彪,徐進永.基于剛?cè)狁詈系难b載機工作裝置性能仿真分析[J].筑路機械與施工機械化,2008,25(1):43-46.
[10] 彭 丹.裝載機工作裝置動力學仿真與有限元分析[D].西安:長安大學,2015.
[11] 李 凱.裝載機工作裝置的動力學仿真與有限元分析[D].楊凌:西北農(nóng)林科技大學,2011.
[12] 王曉寧,裝載機工作裝置動臂框架工作狀態(tài)的力學分析[D].濟南:山東大學,2008.
[13] 劉永臣.輪式裝載機傳動系載荷測試與處理[J].筑路機械與施工機械化,2011,28(8):83-85,89.
[14] 張長偉,裝載機載荷譜測試方法研究[D].西安:長安大學, 2016.
[15] 蔡亞南,裝載機工作裝置泵控液壓系統(tǒng)的建模與仿真[D].太原:太原理工大學,2013.
[責任編輯:杜敏浩]
External Load Identification Model and Experimental Study of Loader Bucket
LU Yong-neng1,2,YUAN Zheng-wen1,2,ZHU Shu-min1,2,XU Lei1,2, ZHAO Yun-liang1,2,SONG Xu-ding3,YU Lu-ping3
(1.Jiangsu Xuzhou Construction Machinery Research Institute,Xuzhou Construction Machinery Group, Xuzhou 221004,Jiangsu,China;2.State Key Laboratory of Intelligent Manufacturing of Advanced Construction Machinery,Xuzhou Construction Machinery Group,Xuzhou 221004,Jiangsu,China; 3.School of Construction Machinery,Chang'an University,Xi'an 710064,Shaanxi,China)
In order to obtain the real external load in the operation process of loader,based on theoretical mechanics and signal testing technology,the loader bucket was taken as the research object,and the theoretical model of external load identification of the working device was established.The load testing system was established in combination with the signal acquisition instrument,and static loading test was conducted on the working device.The results show that the relative error of the load obtained by the testing system is less than 5%and the angle deviation is within 3°,which satisfies the application requirements;the problem of external load acquisition can be solved effectively,which provides data support for structural design and optimization of loader.
loader;working device;bucket;load identification
U415.51
B
1000-033X(2017)05-0098-05
2016-10-28
國家科技支撐計劃(2015BAF07B02)
陸永能(1973-),男,江蘇啟赤人,工程師,研究方向為工程機械結(jié)構(gòu)優(yōu)化設(shè)計與力學測試.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19