剪式座椅懸架的半主動控制方法
2017-08-20 02:26:10孫明劉建軍孫勇
汽車工程師 2017年9期
關鍵詞:模型
孫明 劉建軍 孫勇
(中國汽車技術研究中心)

在現(xiàn)代社會,商用車應用廣泛。相比乘用車,其懸架剛度一般較大,振動水平是乘用車振動水平的9~16倍,振動問題更為嚴重,因此非常容易導致駕駛員過度疲勞,影響駕駛的安全性。目前,可用的方法包括選用合適的輪胎,重型汽車懸架系統(tǒng)和駕駛室采用懸置。除此以外,在座椅結構上采用座椅懸架隔振系統(tǒng),是提高駕駛員乘坐舒適性的一種有效途徑。文獻[1]提出了被動座椅懸架模型并對它的振動特性進行了分析。文獻[2]通過最優(yōu)控制算法的直流伺服電機建立了主動式座椅懸架系統(tǒng)。由于使用主動作動器取代懸架系統(tǒng)中的減振器和彈簧,能夠很好的隔離車輪和車身傳遞上來的振動,但本身結構復雜和消耗的能量大,到目前使用范圍有限。文獻[3]提出了半主動振動隔振系統(tǒng)的概念。文獻[4]使用電流變減振器構建了半主動懸架。由于半主動懸架結構簡單、低功率輸入、力輸出范圍大及具有較強的魯棒性,因此最近幾十年得到了廣泛的應用。商用車使用的剪式座椅懸架由于阻尼原件和彈性原件的特殊安裝,傳統(tǒng)的單自由度模型不能準確描述懸架特性,因此文章設計了適用于剪式座椅懸架的簡化模型及半主動懸架控制策略,以便進一步提高商用車剪式座椅的乘坐舒適性。
1 剪式座椅懸架仿真模型
1.1 剪式座椅懸架ADAMS模型
剪式座椅懸架結構,如圖1所示。
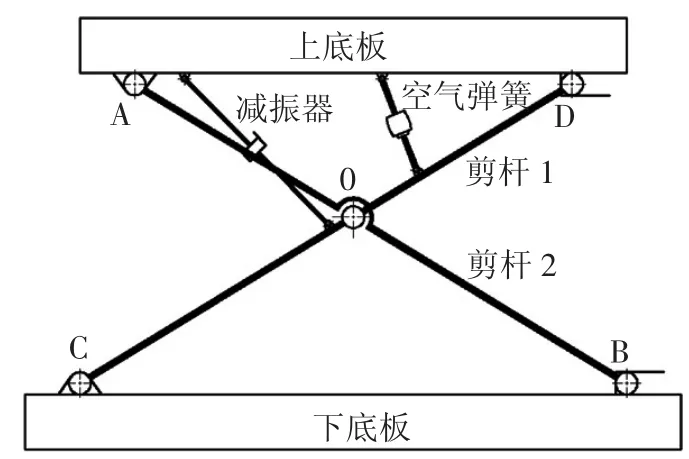
圖1 剪式座椅懸架結構平面圖
根據(jù)懸架的真實結構以及各個不同部件之間的實際約束,在ADAMS環(huán)境下建立的剪式座椅懸架的仿真模型,如圖2所示。

圖2 剪式座椅懸架ADAMS模型圖
仿真模型中需要的主要部件信息,如表1所示,減振器和彈簧的特性曲線,如3圖和圖4所示,其中彈簧的預載力為1 400 N。

表1 座椅懸架部件參數(shù)
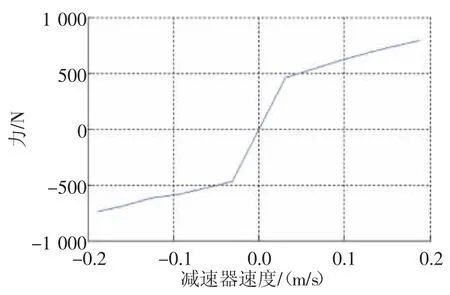
圖3 減振器外特性曲線圖
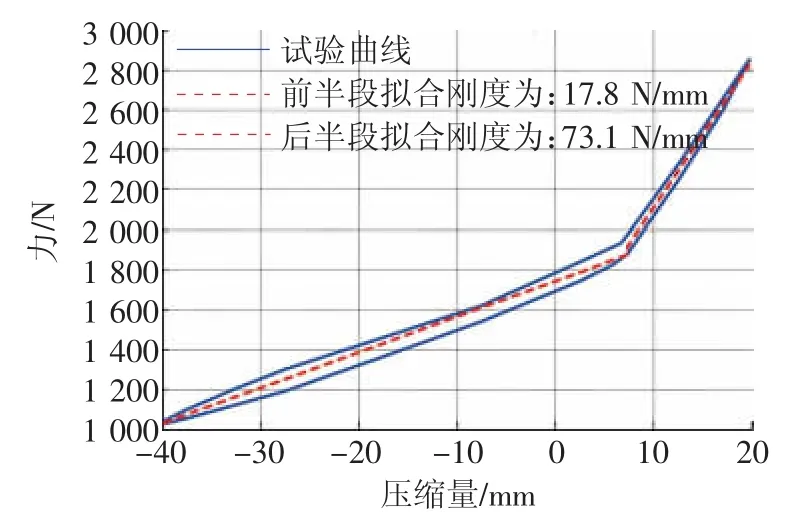
圖4 空氣彈簧的外特性曲線圖(0.3 MPa)
考慮到剪式座椅懸架結構和其自身的約束系統(tǒng)比較簡單,系統(tǒng)的雅可比矩陣不太容易轉變?yōu)椴B(tài)矩陣,因此在ADAMS環(huán)境下采用運算速度和準確度較高的GSTIFF積分器中帶的IS求解方程,IS求解方程也非常適合求解剪式座椅懸架這種處在低頻帶運動的方程。其次文章在剪式座椅懸架的ADAMS模型中進行了簡化和假設:1)忽略各組件約束連接部位由于相對運動而產(chǎn)生的摩擦力;2)將座墊、靠背及人的質量等效為一定的座椅懸架上底板的質量,而沒有將人和座墊以及靠背按照實際的約束單獨考慮。
1.2 剪式座椅懸架模型的臺架試驗驗證
為了驗證剪式座椅懸架ADAMS中模型的精度,將座椅懸架固定在能做垂向運動的示功機上,并將等效為駕駛員質量的沙袋固定在上底板上,如圖5所示,在上底板上安裝加速度傳感器,通過將臺架試驗得到的上底板加速度信號和座椅懸架ADAMS模型得到的加速度進行對比,驗證模型的精度。在不同激勵下的對比結果,如圖6所示。
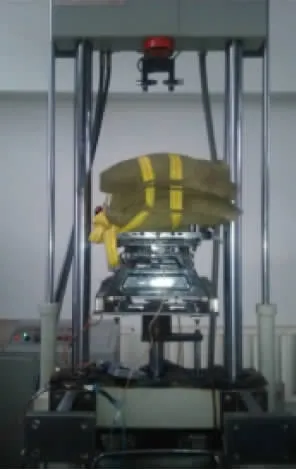
圖5 座椅懸架臺架試驗裝置圖
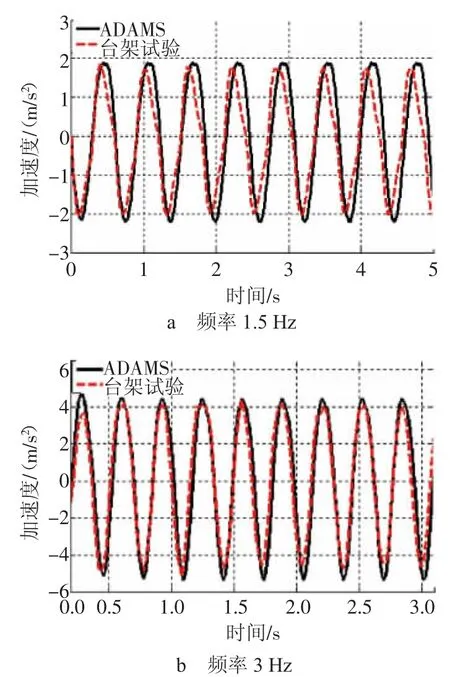
圖6 正弦激勵上底板加速度曲線(振幅20 mm)
由圖6對比可知,兩者能夠很好的吻合,因此說明臺架試驗可以驗證座椅懸架的ADAMS模型具有較高的精度。
2 剪式座椅懸架簡化模型
根據(jù)對剪式座椅懸架真實的物理結構進行約束分析可知剪式座椅懸架屬于單自由度模型,但由于剪式座椅中減振器和彈簧的特殊安裝位置(減振器和彈簧并沒有安裝在上下底板的質心位置)和安裝方式(減振器和彈簧都是通過鉸接的方式連接在2個固定點之間),在座椅運動過程中,減振器和彈簧與水平面之間的角度都會發(fā)生變化,所以減振器阻尼力和上下底板垂向速度的關系和彈簧與下底板垂向相對距離的關系都是非線性的。下面將通過座椅懸架的ADAMS模型得到減振器的垂向外特性(減振器阻尼力和垂向相對速度的關系)及彈簧的垂向外特性(彈簧力和垂向相對距離的關系)。
2.1 彈簧垂向外特性
首先通過在ADAMS環(huán)境下,將座椅上底板固定,下底板輸入一定的位移信號,使座椅動行程從-0.05 m均勻變化至0.05 m,規(guī)定平衡位置處上下底板的垂向相對距離為0。得到彈簧垂向力隨座椅懸架上下底板垂向相對位移的變化曲線(彈簧的垂向外特性),如圖7所示;彈簧垂向力曲線圖,如圖8所示。
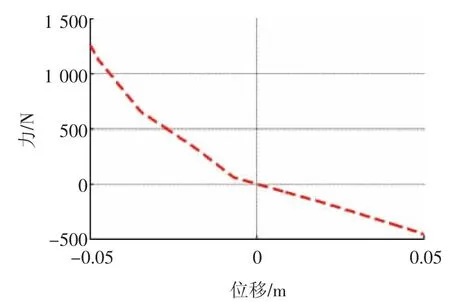
圖7 彈簧的垂向外特性曲線圖
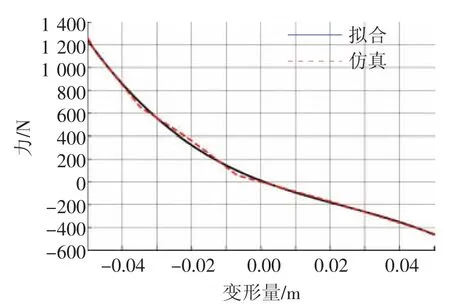
圖8 彈簧垂向力曲線圖
通過擬合可以得到彈簧垂向力與座椅上下底板相對位移的關系,即彈簧的垂向外特性表達式為:

式中:F1v——彈簧的垂向力,N;
sv——座椅上下底板垂向相對位移,m。
2.2 減振器垂向外特性
按照上述方法,首先通過在ADAMS環(huán)境下,將座椅上底板固定,下底板輸入一定的位移信號,使座椅動行程的速度從-0.05 m/s均勻變化到0.05 m/s。得到的減振器垂向力隨座椅上下底板相對速度的變化,如圖9所示;減振器垂向力曲線圖,如圖10所示。
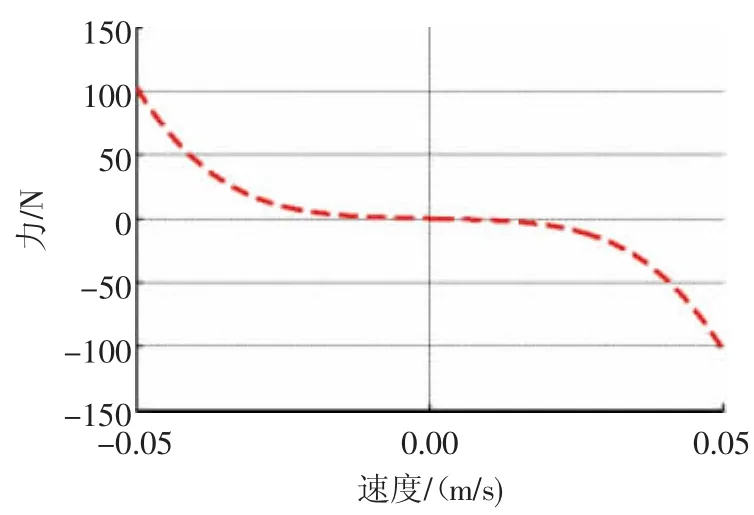
圖9 減振器的垂向外特性曲線圖
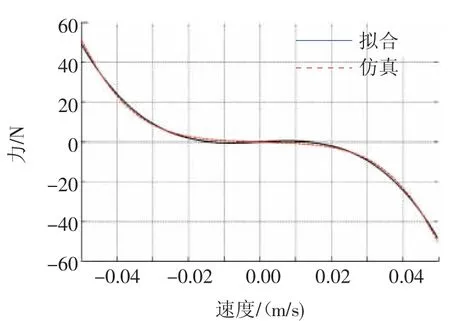
圖10 減振器垂向力曲線圖
通過擬合可以得到減振器垂向力與座椅上下底板相對速度的關系,即減振器的垂向外特性表達式為:

式中:F2v——減振器的垂向力,N;
vv——座椅上下底板間的垂向速度,m/s,向上為正,向下為負。
2.3 剪式座椅懸架簡化模型
根據(jù)得到的剪式座椅懸架彈簧的垂向外特性(如式(1))及得到的減振器的垂向外特性(如式(2)),可以得到圖11所示的剪式座椅懸架的單自由度簡化模型。
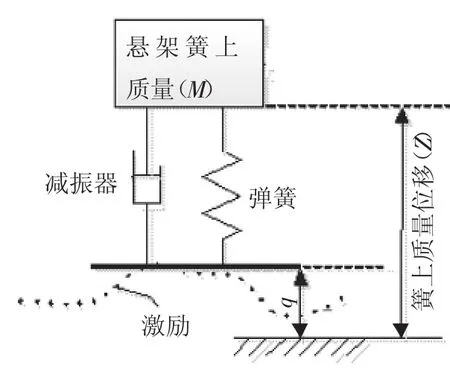
圖11 剪式座椅懸架簡化模型圖
剪式座椅懸架垂向振動動力學方程可表示為:

式中:Z——簧上質量位移,m。
將式(1)、式(2)、sv(sv=Z-q)及代入式(3)可得:

式中:a1,a2,b1,b2,b3——常數(shù),a1=4.3×105,a2=80,b1=2.12×106,b2=0.151×106,b3=1.2×104;
M——車身質量+駕駛員與座椅上底板的等效質量,kg;
q——激勵。
令:x1=Z-q,x2=Z˙-q˙為系統(tǒng)的狀態(tài)變量,則系統(tǒng)的狀態(tài)方程為:

B1=[0-1]T;
x——定義的系統(tǒng)狀態(tài)變量;
3 剪式座椅的半主動控制
在對剪式座椅懸架進行半主動控制算法研究之前,首先要推導建立座椅半主動懸架動態(tài)方程,將得到的F2v替換為作動器的作用力,得到半主動懸架的模型,如圖12所示。
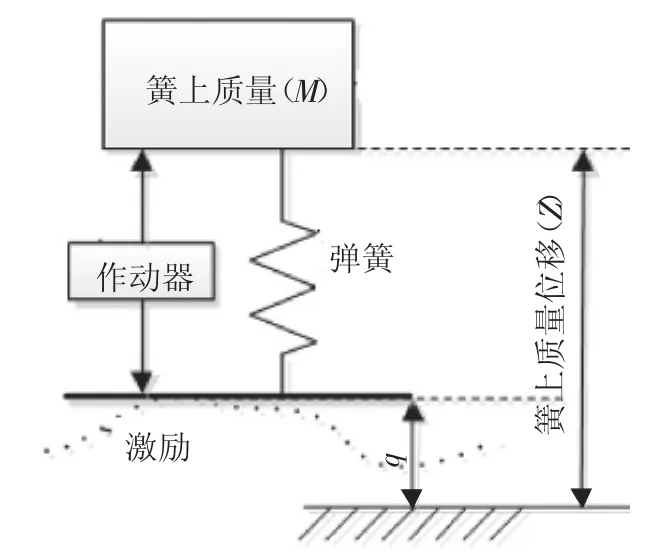
圖12 半主動座椅懸架模型圖
座椅半主動懸架的運動方程為:

式中:U——作動器的作用力,N;
K——最優(yōu)控制矩陣,K=LQR(A2,B2,Q,R,N)。

F——外部輸入矩陣,F(xiàn)=[0-1]T。
3.1 LQG(線性最優(yōu))控制器設計
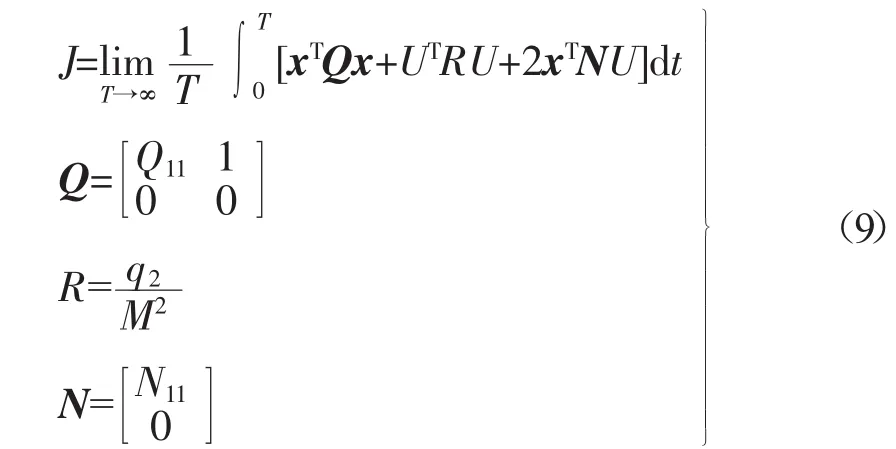
在設計LQG控制器[5]之前,首先要確定懸架系統(tǒng)的性能指標,針對座椅懸架主要關注座椅乘坐的舒適性,因此在座椅懸架行程允許的情況下,座椅簧上質量的加速度應該盡可能小。因此,LQG控制器設計中的目標性能指標(J)即為懸架動行程和簧上質量加速度的加權平方和的積分值,表示如下:

式中:T——時間,s;
q1——座椅懸架動行程的加權系數(shù);
q2——座椅簧上質量加速度的加權系數(shù)。
將式(8)表達為控制理論中熟悉的矩陣形式,如式(9)所示。
由于狀態(tài)方程是線性時變的,因此每一個仿真步長都要計算最優(yōu)反饋增益,難于實現(xiàn)實時控制。為克服LQG控制器的缺點,文章將在最優(yōu)控制器基礎上設計模糊控制器來產(chǎn)生最優(yōu)控制增益,快速地實現(xiàn)座椅懸架的半主動控制。
3.2 模糊控制器設計
最優(yōu)控制增益(K)的矩陣Q,R,N只與系統(tǒng)狀態(tài)座椅的動行程(x1)有關,所以認為K也與x1有關,即K是x1的函數(shù)K(x1)。因此把座椅懸架上下底板垂向相對位移作為模糊控制器的輸入,K作為模糊控制器的輸出。通過式(9),離線計算出最優(yōu)反饋增益系數(shù)(K1和K2),得到的K1和K2隨x1變化的數(shù)據(jù),如表2所示。
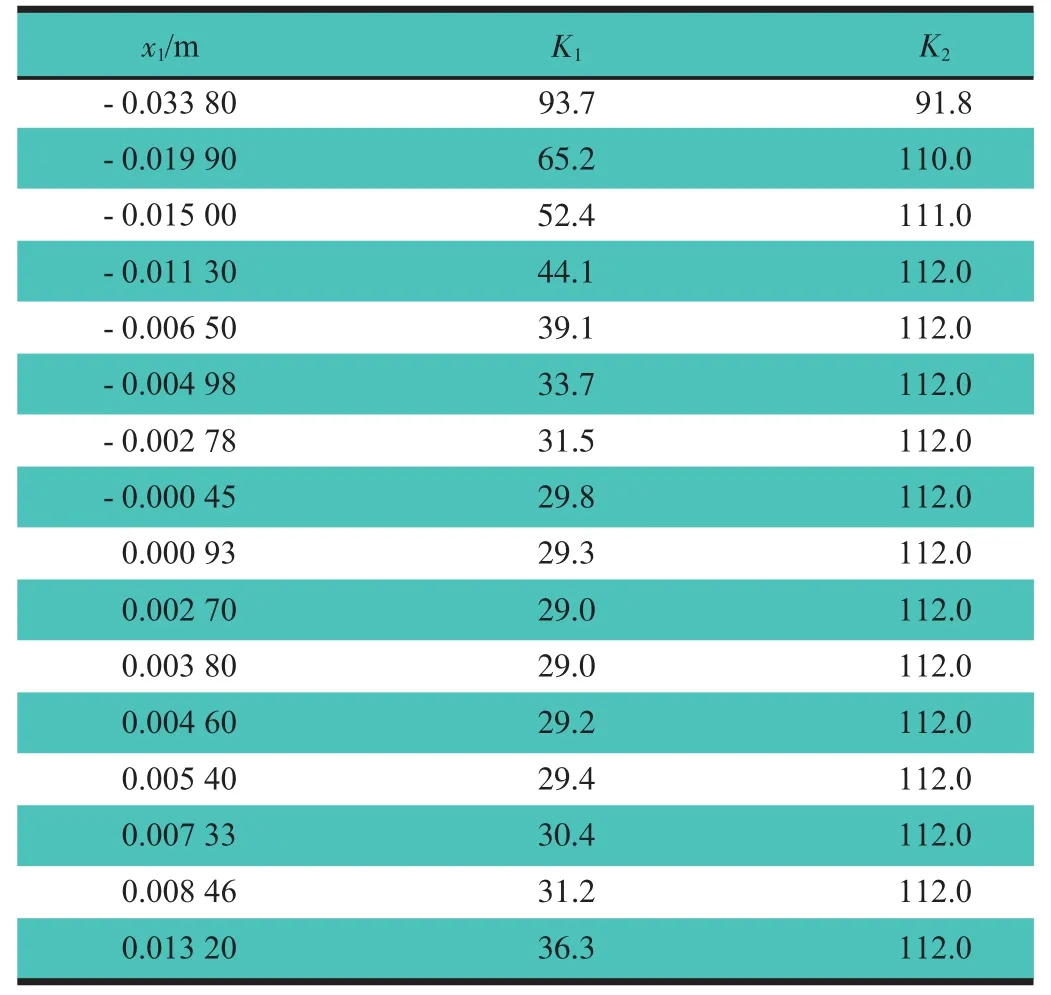
表2 最優(yōu)反饋增益(K1,K2)隨座椅動行程(x1)的變化
根據(jù)K1隨x1的變化關系將x1分為5段,分別為:
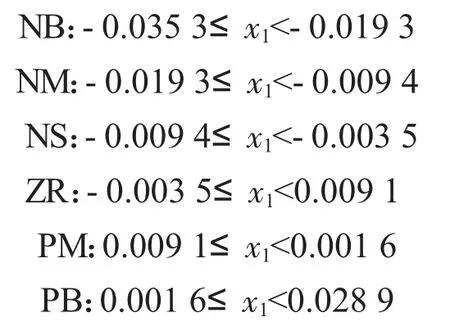
把K1劃分為4段,分別為:
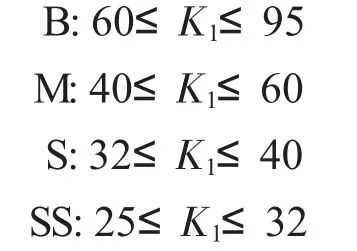
可以得到K1的模糊控制規(guī)則表,如表3所示。

表3 最優(yōu)反饋增益(K1)隨座椅動行程(x1)的模糊控制規(guī)則表
根據(jù)K2隨x1變化關系x1劃分為4段:
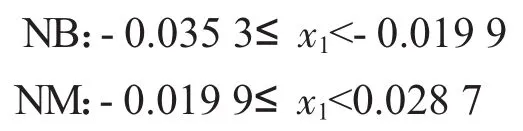
把K2劃分為2段,分別為:
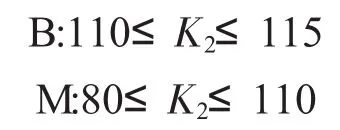
得到K2的模糊控制規(guī)則表,如表4所示。

表4 最優(yōu)反饋增益(K2)隨座椅動行程(x1)的模糊控制規(guī)則表
利用MATLAB工具箱進行仿真,得到當座椅下底板的激勵為掃頻信號,掃頻的振幅為0.01 m,頻率為0~5 Hz,模糊控制的控制效果,如圖14所示。
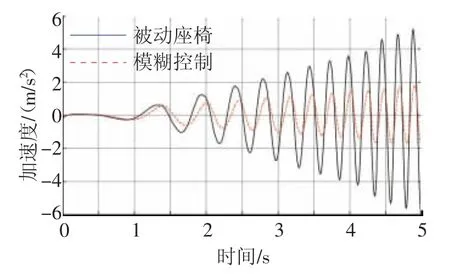
圖13 座椅簧上質量加速度隨時間的變化曲線圖
由圖13可知,掃頻激勵下應用模糊控制的半主動座椅懸架的簧上質量加速度明顯要小于被動座椅懸架簧上質量的加速度,文章設計的半主動座椅懸架能降低座椅簧上質量的振動,提高商用車的乘坐舒適性。
4 結論
文章建立的剪式座椅懸架ADAMS模型具有較高的精度,能夠反映真實座椅的振動狀態(tài)。根據(jù)座椅半主動懸架與被動懸架簧上質量加速度的對比可知,半主動座椅懸架的簧上質量加速度在座椅所受的低頻帶范圍內都要小于原被動座椅懸架的簧上質量加速度,驗證了文章提出的控制策略能夠有效地改善剪式座椅懸架的乘坐舒適性。對進一步提高剪式座椅的乘坐舒適性有一定的參考價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19