汽車ABS邏輯門限控制及仿真*
2017-08-17 06:15:16方春杰
汽車工程師 2017年6期
方春杰
(重慶交通大學(xué))

高速行駛的汽車在行駛方向上遇到突發(fā)狀況時,需要進(jìn)行緊急制動,但當(dāng)前后車輪均位于低附著系數(shù)路面時,不能充分利用制動系統(tǒng)提供的制動力,前后車輪極易發(fā)生抱死,從而造成制動效能下降,汽車的制動距離大幅度增加。汽車防抱死系統(tǒng)(ABS)可以在低附著系數(shù)路面上制動時防止車輪發(fā)生完全抱死,提高汽車的轉(zhuǎn)向操縱能力以及方向穩(wěn)定性,縮短制動距離[1-2]120-121。文章以制動工況下的汽車為研究對象,建立單輪汽車系統(tǒng)動力學(xué)模型,并分析ABS控制原理,建立ABS邏輯門限控制模型,對制動工況的汽車進(jìn)行控制,在Simulink中搭建仿真模型并進(jìn)行離線仿真,仿真結(jié)果表明:該控制方法可以保證制動過程中車輪最佳滑移率,使汽車具有良好的制動效能,縮短制動距離,提高汽車行駛的安全性。
1 單輪汽車系統(tǒng)動力學(xué)建模
1.1 單輪汽車系統(tǒng)制動模型
為了反映汽車在制動工況下車輪的運(yùn)動狀態(tài)以及動力學(xué)特性,建立單輪汽車系統(tǒng)制動模型[3]44,如圖1所示。
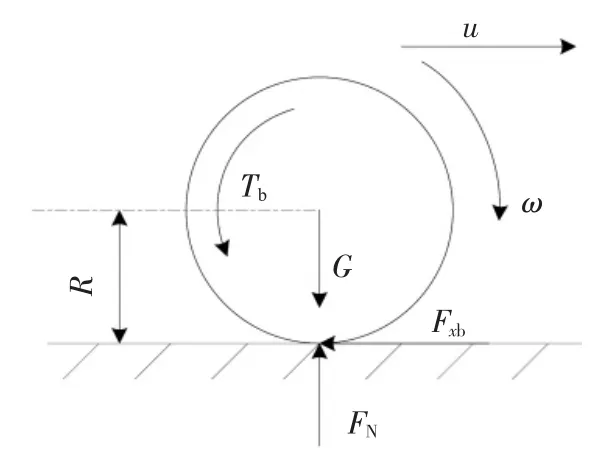
圖1 單輪汽車系統(tǒng)制動模型圖
根據(jù)牛頓第二定律,建立單輪汽車系統(tǒng)制動模型的動力學(xué)方程,如式(1)所示。
式中:m——整車質(zhì)量,kg;
u——縱向車速,km/h;
g——重力加速度,取9.8 m/s2;
ω——車輪旋轉(zhuǎn)角速度,rad/s;
φ——路面附著系數(shù);
R——車輪的滾動半徑,m;
IW——車輪繞轉(zhuǎn)軸的轉(zhuǎn)動慣量,kg·m2;
Fxb——地面制動力,N;
FN——地面法向反力,N;
G——車輪重力,N;
Tb——制動力矩,N·m。
1.2 輪胎模型及制動器模型
采用雙線性輪胎模型[3]44-45,用圖2所示的2條直線段近似反映縱向附著系數(shù)與車輪滑移率之間的關(guān)系。縱向附著系數(shù)的計(jì)算[4],如式(2)所示。
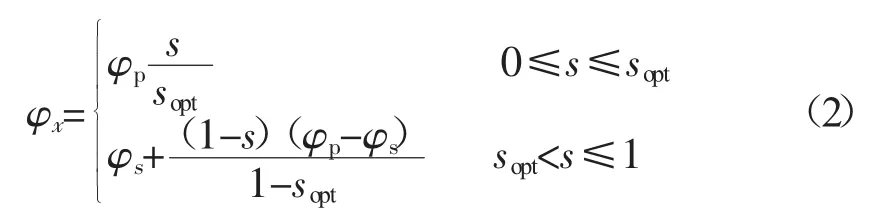
式中:φx——縱向附著系數(shù);
s——車輪滑移率;
sopt——最佳滑移率;
φp——峰值附著系數(shù);
φs——滑動附著系數(shù)。

圖2 縱向附著系數(shù)-滑移率曲線圖
制動器模型主要反映制動器制動力矩隨制動輪缸壓力的變化關(guān)系,建立液壓制動器數(shù)學(xué)模型,如式(3)所示。

式中:Kf——制動器制動系數(shù),N·m/kPa;
P——制動輪缸壓力,kPa。
由于制動系統(tǒng)的機(jī)械部件之間存在間隙及摩擦,且制動液壓管路中的液壓油存在一定的黏度和壓力損失,因而在計(jì)算輪缸制動壓力時加入1階慣性環(huán)節(jié),其傳遞函數(shù)表達(dá)式為:

式中:s*——復(fù)變量;
G(s*)——1階慣性環(huán)節(jié)傳遞函數(shù);
T——時間常數(shù)。
1.3 車輪滑移率最大制動減速度制動距離的計(jì)算
s用于表征汽車制動過程中車輪相對于純滾動狀態(tài)的偏離程度[5],其表達(dá)式,如式(5)所示。

汽車制動過程中的最大制動減速度反映地面制動力的大小,直接影響汽車的制動距離,裝有ABS的汽車最大制動減速度為[1]97:

式中:abmax——汽車最大制動減速度,m/s2。
汽車的制動距離是評定其制動效能的重要指標(biāo),制動距離與汽車的行駛安全密切相關(guān),其大小主要由初始制動縱向車速、制動器的作用時間及最大制動減速度決定。汽車制動距離的表達(dá)式為[1]99:

式中:S——制動距離,m;
ua0——初始制動縱向車速,km/h;
τ2'——制動器制動力相對于制動踏板力滯后時間,s;
τ2''——制動器制動力增長過程所需的時間,s。
2 ABS邏輯門限控制
2.1 ABS控制原理分析
汽車制動力系數(shù)(φb)為地面制動力與垂直載荷的比值[1]92,車輪在不同s下,其φb也會不同。φb隨s的變化曲線,如圖3所示。由圖3可以看出,φb起初隨s的增加而迅速增加,隨后其緩慢增加至φp,當(dāng)s進(jìn)一步增加時,φb從φp下降至φs(此時s=1,車輪完全抱死)。ABS主要由輪速傳感器、電子控制單元(ECU)、制動主缸、輪缸及液壓調(diào)節(jié)器等部件組成。其工作原理[1]121為輪速傳感器將采集到的車輪旋轉(zhuǎn)信號傳遞給ECU,ECU對輪速信號進(jìn)行處理后輸出指令并傳遞給液壓調(diào)節(jié)器,使其對制動管路的壓力進(jìn)行調(diào)節(jié),保證制動過程中的sopt,即將s控制在圖3所示的0.15~0.2,以防止車輪發(fā)生抱死。

圖3 制動力系數(shù)-車輪滑移率曲線圖
當(dāng) s位于 0.15~0.2 時,φb取值為 φp,由式(6)可知,此時abmax取最大值,且根據(jù)式(7),在ua0等條件保持不變的前提下,進(jìn)而得知汽車的制動距離,此時取最小值,因而引入ABS對汽車制動過程進(jìn)行控制可以有效地提高制動效能,縮短制動距離,提高汽車制動的安全性。
2.2 ABS邏輯門限控制方法及控制邏輯
基于ABS控制原理,采用ABS邏輯門限控制方法對汽車的制動過程實(shí)施控制,其基本控制思想是將s控制在0.15~0.2的最佳范圍內(nèi),具體控制過程[6]如下。
1)汽車開始制動時,駕駛員踩下制動踏板,制動系統(tǒng)液壓管路壓力升高,制動器制動力也隨之上升,車輪旋轉(zhuǎn)角速度也相應(yīng)減小,車輪開始出現(xiàn)滑移;
2)當(dāng)s升至最佳范圍的上限值(0.2)時,采用ABS控制并減小制動輪缸壓力,降低制動力,使車輪轉(zhuǎn)速有所上升,從而減小s;
3)當(dāng)s降至最佳范圍的下限值(0.15)時,采用ABS控制并增大制動輪壓力,增加制動力,從而適當(dāng)?shù)亟档洼喫伲蕴岣遱。
基于上述控制思想,建立單輪汽車制動系統(tǒng)ABS控制邏輯[7],如圖4所示。
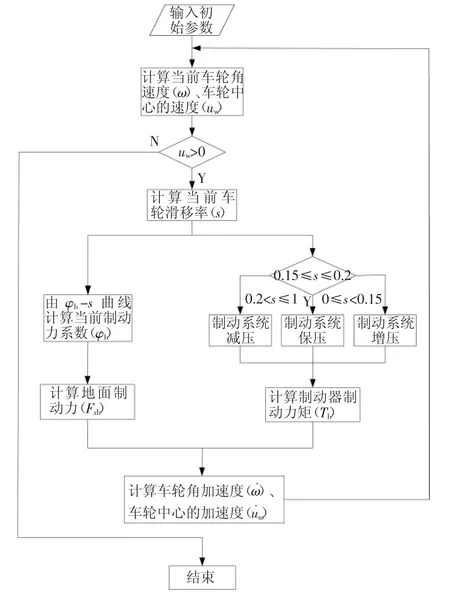
圖4 單輪汽車制動系統(tǒng)ABS控制邏輯圖
3 ABS仿真分析
采用MATLAB/Simulink搭建單輪汽車制動系統(tǒng)ABS邏輯門限控制仿真模型,如圖5所示。仿真模型中的具體參數(shù),如表1所示。

表1 汽車ABS仿真模型具體參數(shù)
為了驗(yàn)證ABS的控制效果,選取車輪sopt為0.2,設(shè)定仿真時間為15 s,采用Ctrl的不同取值表示有無ABS控制(Ctrl=1代表有ABS控制,Ctrl=0代表無ABS控制),對有無ABS控制的汽車進(jìn)行對比仿真,得到仿真結(jié)果,如圖6~圖8所示。從圖6可以看出,無ABS控制的汽車在5.13 s時車輪已發(fā)生完全抱死,而施加ABS控制后的汽車則9.97 s后車輪轉(zhuǎn)速才逐漸減小為0。
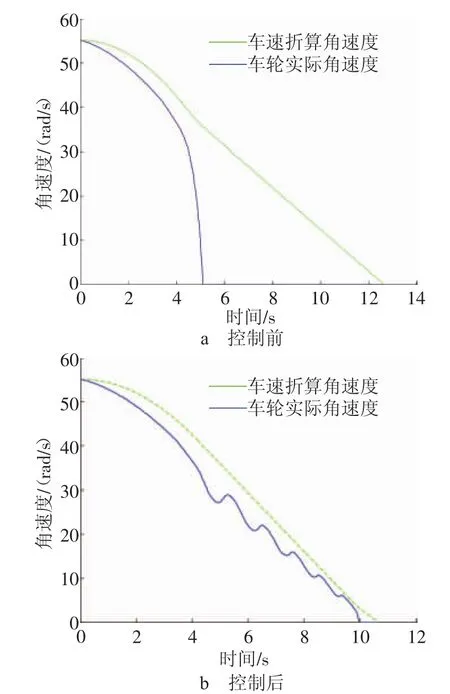
圖6 ABS控制前后車輪角速度變化曲線圖
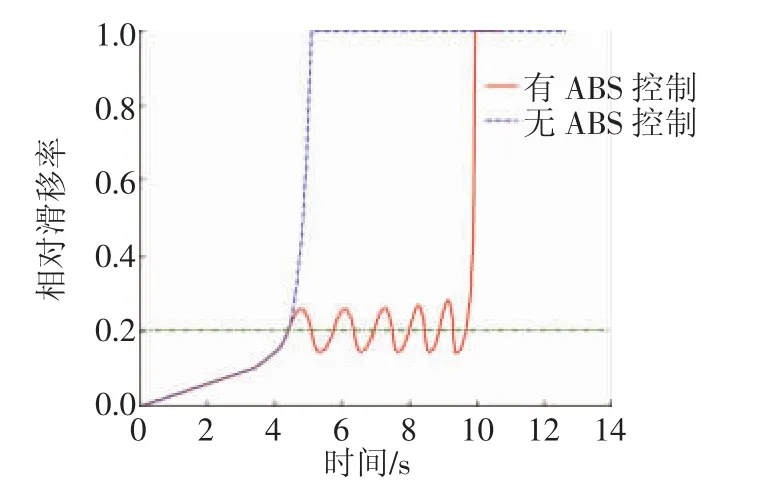
圖7 ABS控制前后的車輪相對滑移率曲線圖
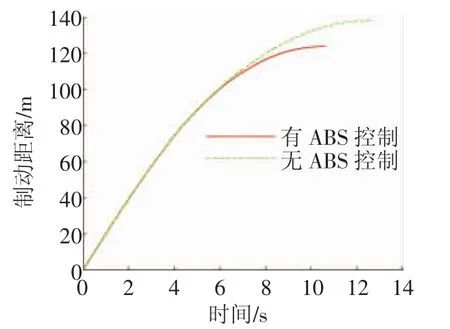
圖8 ABS控制前后的汽車制動距離曲線圖
結(jié)合圖7,施加ABS控制前后的車輪相對滑移率在4.42 s時均達(dá)到最佳滑移率(0.2),4.42 s后,無ABS控制的車輪相對滑移率迅速增加至1,與圖6a的結(jié)果保持一致,此時車輪完全抱死,而施加ABS控制后的車輪相對滑移率以最佳滑移率(0.2)為基準(zhǔn),并以0.05的幅度等周期上下波動,直至9.97 s時車輪相對滑移率才上升至1。從圖8中可以看出,無ABS控制的汽車制動距離為138.28 m,而施加ABS控制后的汽車制動距離為123.75 m,因而施加ABS控制可以縮短汽車的制動距離。
綜合上述分析可知,無ABS控制的汽車在緊急制動過程中車輪極易發(fā)生抱死,若車輪為轉(zhuǎn)向輪,則該車輪失去轉(zhuǎn)向能力,且汽車制動距離有所增加。施加ABS控制可以有效地防止車輪抱死,車輪不會喪失轉(zhuǎn)向能力,且能夠縮短汽車制動距離,提高行車的安全性。
4 結(jié)論
針對制動工況下的汽車,建立了單輪汽車系統(tǒng)動力學(xué)模型,采用ABS邏輯門限控制算法根據(jù)最佳和實(shí)際車輪相對滑移率的差值對制動輪缸壓力進(jìn)行調(diào)節(jié),進(jìn)而實(shí)現(xiàn)對車輪制動力的控制。結(jié)合有無ABS控制的汽車進(jìn)行對比仿真,結(jié)果表明,該控制方法可以較好地將汽車滑移率控制在最佳范圍,提高了汽車的制動效能,有效地縮短了制動距離,對于提高汽車的行駛安全性具有一定的作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37