藏木電廠孤網事故分析及調速器控制策略研究
2017-08-16 04:20:12蔡衛江
水電站機電技術 2017年7期
蔡衛江,榮 紅
(南京南瑞集團公司,江蘇 南京 211106)
藏木電廠孤網事故分析及調速器控制策略研究
蔡衛江,榮 紅
(南京南瑞集團公司,江蘇 南京 211106)
通過對目前西藏最大的水電站藏木電站頻率及有功功率振蕩引起的事件分析,詳細闡述了事件產生的原因,從電站調速器的角度分析了原來的調速器調節控制結構,提出了相應的調速器調節框圖結構優化方法、參數優化策略、工況準確識別方法及切換判據依據等,新的控制方法已在藏木水電站投入運行并為系統的安全穩定起到重要作用。本文也可為國內及國外類似水電站在孤網、小網情況下的穩定控制提供一定的參考。
大機小網;孤網;控制結構;參數優化;切換判斷
0 引言
西藏電網目前主要由覆蓋拉薩、山南、日喀則、那曲、林芝5個地區的藏中電網,以及昌都、阿里兩個地區電網構成“一大二小”的電網格局。而藏木水電站是目前西藏最大的水電開發項目,也是雅魯藏布江干流上規劃建設的第一座水電站,裝機6臺,單機85 MW,是藏中電網的主力電源。電站的建設有利于緩解西藏中部地區用電的緊張局面,對維護西藏和平穩定等具有重要意義。然而,藏中電網總容量只有1 250 MW~1 300 MW,藏木電站機組單機容量已占系統總容量的6.7%,屬于典型的“大機小網”運行工況[1],機組負荷稍有較大變化,都會對電網頻率產生波動,因此對機組調速系統的控制要求較高[2]。
2015年1月,藏木電廠1號機、2號機分別投產發電。1月23日14∶00,藏中電網系統頻率、電壓出現異常波動,頻率最高波動到52.24 Hz,最低到47.63 Hz,并網運行的1號機、2號機也隨著出現導葉來回抽動、機組出力反復波動等情況,調速器不斷調整造成油壓持續下降,最終,兩臺機分別因事故低油壓保護動作跳機。電網穩控裝置隨即發出切負荷命令,電網頻率逐漸穩定在50.3 Hz。整個事故造成電網減出力220 MW,切負荷210 MW,頻率和負荷波動持續約4 min,給整個藏中地區的安全供電造成一定影響。
1 事故分析
事故后,國家電網及西藏電網公司調度中心、中國電科院、華能藏木電廠、南瑞集團公司等相關單位,對于“1月23日藏木電廠2臺機組跳閘”情況展開了詳細的分析和討論,給出了主要原因:
(1)當時整個藏中電網的負荷約600 MW,藏木兩臺機當時帶負荷約150 MW,占比約25%,藏木電站的負荷變化對整個電網的影響較大,在電網波動過程中,系統頻率與藏木電站兩臺機功率變化趨勢基本同步、一致,由此判斷系統頻率的波動主要是由藏木機組出力波動引起。且在藏木機組跳閘后,電網切除部分負荷,電網波動停止,系統電壓和頻率恢復正常。
(2)從當時藏木電站1號機頻率、導葉開度、出力、一次調頻動作錄波圖來看(參見圖1),初始時系統的頻率有一個緩慢下降的變化,調速器一次調頻動作,導葉向上調節,機組出力上升,超調較大,系統頻率隨即上升,導葉又往關方向調節,但調節并不穩定,導葉來回抽動,導致機組出力波動,頻率波動,最終導致事故低油壓停機。
(3)檢查藏木電站調速器的參數及調節方式,發現當時調速器雖然設置有大網/小網運行方式切換把手,但把手打在大網方式,其次其頻率調節參數設置較大,比例系統KP為8,積分增益KI為8,微分增益KD為1,調差系數BP設置為4%,頻率死區設置為0.3 Hz。由于藏中電網運行中頻率經常在49.5~50.5 Hz范圍內變化,當系統頻率超過設置的0.3 Hz死區時,電廠調速器設置的一次調頻PID調節參數較大,該參數是按照大電網模式設置,做一次調頻試驗時,頻率采用外部信號源輸入,并不能反映實際電網頻率變化,實際上西藏電網屬于小網,電網頻率受負荷和發電影響變化范圍較大且較頻繁,當電網頻率超過頻率死區(0.3 Hz)較多時(西藏電網頻率經常在49.5~50.5 Hz范圍內變化),調速器一次調頻將會產生較大輸出,再加上水電機組水錘效應的影響,從而引起系統功率的擺動,加劇系統頻率的波動。
(4)綜合上述情況,機組頻率波動導致事故跳機主要由以下原因造成:①一次調頻PID調節參數設置不合理,前面已經提到,按照常規大電網并網模式進行調速器一次調頻試驗來確定參數是極其錯誤的,大電網模式下,單臺機導葉動作基本不會產生電網頻率變化,實際西藏電網屬于典型的“大機小網”模式,導葉動作造成的單臺機組出力變化會產生電網頻率的相應變化,因此調節參數必須通過實際并網擾動試驗(反饋采用實際電網頻率)來確定,若現場不能進行,也必須采用軟件建模仿真,通過安全穩定計算來確定調速器初始PID參數[3]。②導葉的調節速度不能太快,必須和電站機組的慣性比率RI相匹配,RI為電站水流慣性時間常數和機組慣性時間常數的比值,一般RI不超過0.4[4]。RI越大,表明電站水流慣性對機組調節的影響越大,導葉在劇烈變化過程中,機組的出力并不能同步變化,易出現反調、滯后等現象,從圖1的錄波圖中可以看出,調節末端,當導葉調節幅度加大時,機組有功和開度變化出現了不同步,反而造成了系統頻率的波動幅度加大。最終導致事故低油壓而跳機。
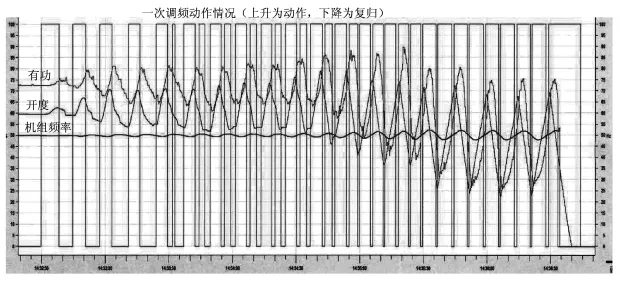
圖1 藏木電站1號機頻率、導葉開度、出力、一次調頻動作錄波圖
2 原調速器調節規律
藏木電站采用的調速器PID調節原理框圖如圖2所示,圖中有兩個PID調節環節,前一個稱為頻率主環,后一個PI調節框圖稱為導葉副環,PGV是負荷的給定值。最終控制輸出U實際上是對應導葉偏差的增量信號。調速器根據機組開機、空載、并網、停機等工況的變化,自動改變PID參數、頻率給定值、人工失靈區、永態轉差系數、開度限制值、功率給定值等。各工況下參數的改變和調節輸出量的計算,均由微控制器的軟件實現[2]。其變參數策略簡述如下:
空載工況,不跟蹤電網頻率時,調速器頻率給定為50 Hz,可接受手動按鈕或同期裝置脈沖增減給定;跟蹤網頻時,頻率給定為:網頻+跟蹤頻差。空載時調差系數BP為零,死區為零,PID調節參數采用空載參數,積分限幅為±10%導葉全開度,開度給定輸出限幅為0~1.5倍的空載開度。
并大網運行時,調速器頻率給定為50 Hz,一次調頻投入時,BP和死區為設定值(一般按系統要求設置,BP=4%,頻率死區為0.3 Hz),PID調節參數采用負載參數,積分限幅為±100%開度,開度給定輸出限幅為0~100%。
功率一般都通過監控系統來調節(發增減脈沖),調速器將增減脈沖換算成導葉開度增減量PGV,直接作用于導葉位置輸出,由監控系統完成功率的大閉環調節,系統頻率未超出死區時,調速器按開度調節動作。當系統頻率超出設定死區時,按一次調頻規律作用于導葉。
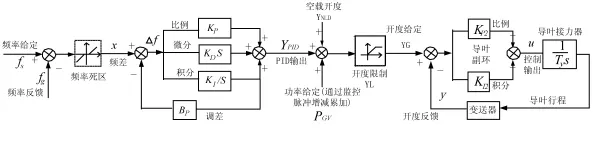
圖2 藏木調速器原調節原理框圖
3 改進后的調速器調節結構
原來的調速器控制策略存在對調速器并小網運行、孤網運行(帶廠用電、區域用電等較小負荷)的控制模式考慮不足,雖然通過優化調速器PID調節參數,在原有控制結構上也能達到一定控制目的,但不能適應機組并大網、小網及孤網運行的各種情況,我們通過對調速器控制結構的優化,設置科學的大網、小網的切換判據,結合不同的優化PID調節參數,從而滿足機組不同運行工況的調節穩定要求。
改進后的調速器控制結構框圖如圖3所示,主要變化有3點:
(1)在原有空載PID參數,負載PID參數(一次調頻參數)基礎上,增加了一組小網PID調節參數,包括調差系數BP和頻率死區,均可以單獨設置,該參數一般先通過計算機仿真建模穩定計算獲得,后期可以通過現場試驗驗證修改確定。
(2)監控系統過來的增減功率量PGV放在了頻率調節環前面,和頻率偏差進行疊加后輸入到PID環節,導葉給定算法變為:

各變量見圖3所示,改進后的結構算法有利于當大網切換到小網時,克服切換前監控功率給定值的影響。參見圖2:原來的控制算法為:

公式2算法PGV疊加在頻率環節之后,相當于前饋環節,雖然這樣導葉調功速度較快,但存在當大網切換到小網時,監控給定量PGV一直保留切換前數值,會導致機組頻率不能調整到50 Hz(一般會高于額定頻率)。新的改進算法,可以在大小網切換瞬間重新計算PGV,同時將PGV疊加到頻率環節之前,與頻差疊加后輸入到PID模塊,這樣可以保證機組頻率最終能夠回到額定。當然在大網與小網互相切換時,導葉給定、PGV、積分YI一定要重新計算,確保切換前后導葉給定保持一致。
(3)關于孤網工況(如雷擊等事故造成的機組遠方線路跳閘,機組空載或帶廠用電等區域較小負荷情況),此時仍然可以按圖3所示的結構調節,只不過PID調節參數、調差系數BP、頻率死區需要適當修改,一般PID調節參數可以選用空載參數,或選用小網參數,BP一般選為0。
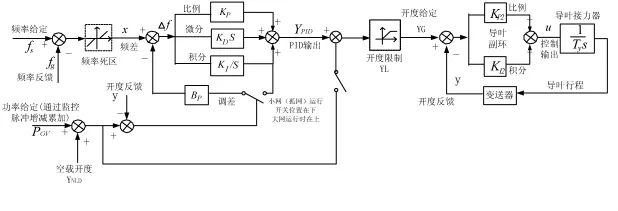
圖3 改進后調速器調節原理框圖
4 大小網、孤網切換判斷方法及處理
目前常用的判別方法主要以頻率偏差為依據,在此基礎上,增加有功功率作為輔助判斷[5]。根據藏木電廠實際情況,大網與小網,大網與孤網的判斷依據如下:
(1)人工判斷:裝置面板設置“大網/小網”切換開關,運行前運行人員根據當前機組工況選擇。
(2)自動判斷:當切換開關仍處于大網,機組處于并網工況,但系統頻率檢測超過50±0.5 Hz,機組有功大于10%額定時,延時1 s,調速器轉換到小網工況,當頻率超過50±0.5 Hz,有功小于10%額定時,延時1 s,調速器轉換到孤網工況。
(3)切換前后數據處理:大網轉到小網時參數調用小網PID參數,調差Bp適當減小(推薦1%~2%),死區按要求設置(西藏地區為0.3 Hz),數據處理方面:功給PGV=Y(導葉反饋)-Ynld(空載開度) -YPID,積分輸出YI=Y(導葉反饋)-Ynld(空載開度),導葉給定按新的公式1進行計算,確保切換無擾動。大網轉到孤網時參數調用空載PID參數,調差Bp設為0,死區按要求設置(西藏地區為0.3 Hz),數據處理方面:功給PGV清零,導葉給定重新初始化,保持前后一致。
(4)小網或孤網切換回大網的判斷:大網工況主要考慮將來藏中電網聯網后的運行情況。機組并大網運行時,機組頻率變化很小,理論上講,一般不超過49.9~50.1 Hz,可以通過一段時間內(一般3 min)檢測頻率是否一直在該范圍內來判斷,但考慮到測頻信號毛刺的影響,本文采用了一定的濾波算法,頻率每20 ms檢測一次,3 min內頻率的測量值共9 000點,若超過80%的數據點均在49.9~50.1 Hz范圍內,則判斷機組已經回到大網工況。
5 結語
目前,西藏水電建設已進入較快的發展時期, 2015年10月,藏木6臺8.5萬kW機組全部發電, 12月底,西藏第二大果多水電站也投產發電。一方面藏中電網與內地還沒有聯網,存在“大機小網”穩定問題;另一方面,因雷擊等事故可能造成機組遠方斷路器跳閘,形成一個區域供電的孤網狀態,如果調速器的參數及控制策略不完善,不能準確識別工況和切換參數,往往出現頻率波動、振蕩等事故。藏木電廠經過事故分析和調速器控制策略優化改進后,切換動作正常,參數設置合理,目前運行情況穩定,為西藏電網和地區的穩定做出了重要貢獻。
目前除了西藏地區外,由中國承建的國外電站也大量存在“大機小網”問題,如緬甸瑞麗江電站、柬埔寨額勒賽電站、正在建設的柬埔寨桑河二級電站,本文所提出的調速器控制策略和參數優化以及切換判斷原則均可以在類似電站機組上推廣應用。
[1]桑 果.西藏電網大規模光伏電網調度運行策略的探討[J].西藏科技,2013(12):77-79.
[2]高 文,榮 紅,蔡衛江.±800 kV直流孤島方式下小灣調速系統控制策略研究及應用 [J].水電自動化與大壩監測, 2013,37(2):27-31.
[3]鄧 磊,等.水輪機調速系統一次調頻功率振蕩現象分析及解決[C]//全國大中型水電廠技術協作網第五屆年會論文集,2008:112-125.
[4]魏守平.水輪機調速系統仿真[M].武漢:華中科技大學出版社,2012:157-162.
[5]邵 彬.基于孤網下水輪機調速器參數自動切換方法的實現[J].水電自動化與大壩監測,2010,34(6):35-37.
TV734.4
B
1672-5387(2017)07-0065-04
10.13599/j.cnki.11-5130.2017.07.020
2017-04-27
蔡衛江(1970-),男,研究員級高級工程師,從事水電站水輪機調速系統、綜合自動化控制裝置的研究和設計等工作。