基于人機共駕的車道偏離防避控制*
2017-08-09 02:31:03汪選要王其東高振剛王家恩
汽車工程 2017年7期
汪選要,王其東,高振剛,王家恩
(1.合肥工業大學汽車與交通工程學院,合肥 230009; 2.安徽理工大學機械工程學院,淮南 232001)
?
基于人機共駕的車道偏離防避控制*
汪選要1,2,王其東1,2,高振剛1,王家恩1
(1.合肥工業大學汽車與交通工程學院,合肥 230009; 2.安徽理工大學機械工程學院,淮南 232001)
提出了兩層駕駛員轉向預測模型,基于駕駛員視覺預瞄信息的第一層體現了路徑跟蹤特性,基于神經肌肉動力學模型的第二層體現了駕駛員轉向操作特征,采用CarSim/Simulink對比了不同狀態駕駛員的路徑跟蹤性能。設計了車道偏離防避系統(LDAS)的期望橫擺角速度觀測器和轉角PID控制器。建立了轉向系統等效動力學模型,并基于滑模理論設計了LDAS的魯棒轉矩控制器。由于車輛偏離車道程度與預瞄點的側向偏移量和駕駛員力矩的關系不能精確描述,故基于模糊控制理論設計了LDAS人機共駕模糊控測器。進行了基于CarSim/Simulink的仿真和基于CarSim/LabVIEW RT的硬件在環試驗,對比了駕駛員、LDAS控制器和人機共駕糾正車輛偏航的能力。結果表明,所提出的人機共駕策略能及時糾正車輛偏航,使之恢復到正常車道,并保證從人機共駕到駕駛員控制切換過程的平順性。
車道偏離;駕駛員模型;人機共駕;共控系數
前言
在無人駕駛技術無法保證絕對可靠的前提下,輔助駕駛技術是智能車發展的重要組成部分,根據統計[1],約有50%的交通事故是因為車輛偏離正常的行駛車道引起的,究其原因主要是駕駛員心神煩亂、注意力不集中或疲勞駕駛,因此希望通過研究輔助駕駛技術來提高駕駛安全性,特別是通過主動安全技術阻止交通事故的發生。
車道偏離預警系統(lane departure warning system, LDWS)在駕駛員無意識(駕駛員未打轉向燈)偏離原車道時發出警報,或轉向盤開始震動以提醒駕駛員目前車輛偏航的狀況,為駕駛員提供更多的反應時間,從而大大減少了因車輛偏離車道引發的碰撞事故。而基于跨道時間(time to lane crossing, TLC)的輔助決策成為了車道偏離預警系統的關鍵,如果TLC閾值選取得過于保守會導致預警系統誤報警[2-3],嚴重影響駕駛員的駕駛心情。車道偏離識別算法詳見文獻[4]和文獻[5]。
與LDWS類似的系統是車道偏離防避系統(lane departure avoidance system, LDAS)[6]。LDAS最常用的轉向執行器為基于電動助力轉向(electric power steering, EPS)系統的電機,文獻[7]中基于EPS實現了車道保持控制,并解決了EPS部件與車道保持執行部件之間的協調問題。文獻[8]~文獻[10]中將線控轉向作為LDAS和車道保持輔助系統(lane keeping assistance system, LKAS)的執行機構,但線控轉向系統成本高。可通過差動制動控制[11-12]或差動驅動控制產生橫擺力矩糾正車輛恢復到正常車道,但差動制動會影響乘坐舒適性,而差動驅動比較適合輪轂電機驅動。
人機共駕需要執行器轉向與駕駛員轉向的疊加,LDAS人機控制權重的分配成為了關鍵。文獻[13]中基于復合Lyapunov函數和線性矩陣不等式等理論提出了LDAS切換控制策略,算法比較復雜。文獻[14]中提出了一個觸覺引導系統實現駕駛員和轉向執行器共同控制轉向盤。文獻[15]中建立了人-車-路閉環車道保持系統模型,基于預瞄控制并通過人機協調指標實現LKAS的人機協調控制。文獻[16]中基于駕駛員模型識別駕駛員的意圖來最小化LKAS控制器的干預,從而實現人機協調控制。
上述方法沒有實時在線考慮駕駛員的狀態,文獻[17]中基于人機主權分配模塊設計了LDAS的LPV/H∞轉角控制器和2階滑模轉矩控制器,且設計轉向控制器時考慮了駕駛員特性,但其人機權重分配比較復雜,為了在線協調從LDAS人機共駕到駕駛員駕駛模式平滑切換,還須進一步研究駕駛員不同狀態下人機權重的分配。本文中提出了反映駕駛員生理與心理特征的車道保持神經肌肉動力學轉向模型,基于PID控制和滑模控制理論提出LDAS的轉角轉矩雙閉環控制,基于模糊控制理論設計人機共駕的共控系數模糊控制器,并基于CarSim/Simulink仿真和CarSim/LabVIEW RT硬件在環仿真驗證LDAS人機共駕性能。
1 駕駛員轉向模型
基于駕駛員神經肌肉特性的道路預瞄跟蹤控制器的駕駛員閉環轉向模型如圖1所示。道路跟蹤層根據視覺預瞄信息通過路徑跟蹤自動轉向實現車輛側向位置控制,但這不能反映駕駛員的轉向意圖,因此通過內環體現駕駛員轉向行為神經肌肉的反應特性,從而實現補償轉向角誤差或對輪胎力的擾動抑制。為體現駕駛員輸出力矩的限制引入了飽和環節。
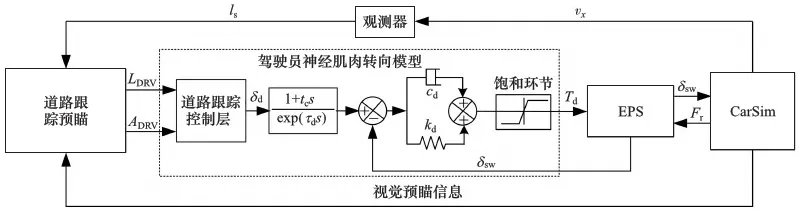
圖1 駕駛員轉向模型
1.1 道路跟蹤層
由圖1可見,駕駛員轉向模型通過視覺獲得預瞄區域的道路信息。圖中:LDRV為車輛縱軸預瞄點相對期望路徑的側向偏移量,m;ADRV為車輛縱軸至預瞄點與期望路徑之間的誤差區域面積,m2。道路跟蹤控制器輸出的駕駛員期望轉角為
δd=-(KL×LDRV+KA×ADRV)
(1)
式中KL和KA為控制器增益,KL=5,KA=10。預瞄距離對駕駛員模型的車道跟蹤性能影響很大,設定簡單的預瞄距離觀測器ls=vxt-8,其中:ls為預瞄距離,m,lsmin=10m,lsmax=18m;vx為車速,m/s;t為時間,t=1s。通過車速縱向控制來消除道路曲率的變化對車道跟蹤性能的影響,即道路曲率較大時降低車輛速度,這也符合實際駕駛情況。
1.2 駕駛員特性層
文獻[18]中提出了以駕駛員神經肌肉動力學模型來表示駕駛員的轉向控制特性,反應延時是人類神經系統固有的認知行為特性,取決于多方面因素,例如年齡、心理和生理狀態等。一般駕駛員的反應延時時間τd=0.15~0.3s[19],如圖1所示,加入微分校正環節,設定時間常數tc=τd。駕駛員肌肉動力學特性采用彈簧阻尼模型等效,其中kd和cd分別表示彈簧剛度和阻尼系數,反映了肌肉的固有剛度和阻尼。這些特定的駕駛員神經肌肉屬性參數可體現駕駛員年齡、心理和生理等特征。
1.3 基于CarSim/Simulink仿真
以駕駛員模型A和B分別模擬駕駛員不同的心理和生理狀態,駕駛員模型A處于疲勞駕駛狀態,τd=0.3s,kd=5N·m/rad,cd=0.7N·m/(rad/s);駕駛員模型B的注意力高度集中并且精力充沛,τd=0.15s,kd=100N·m/rad,cd=1N·m/(rad/s)。車輛模型為C-Class, Hatchback 2012,跟蹤路徑如圖2所示,兩次90°轉彎,右轉彎半徑為200m,左轉彎半徑為100m。路面附著系數0.85,縱向車速如圖3所示。分別以駕駛員A和B跟蹤期望路徑,路徑跟蹤
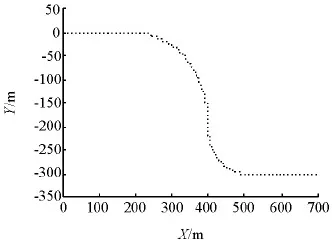
圖2 跟蹤路徑
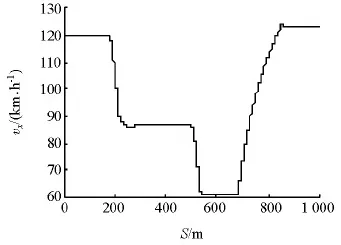
圖3 參考車速
側向偏移量如圖4所示,由于第2個彎道曲率半徑較小,而車速超過了60km/h后,駕駛員A和B雖然都能通過左轉彎彎道,但駕駛員A的最大偏移量達到了0.56m,路徑跟蹤精度較差,而駕駛員B的最大偏移量為0.19m,具有較高的路徑跟蹤精度。由此可以得出,隨著肌肉同步收縮的增加和反應時間的縮短,路徑跟蹤精度也隨著增加,同時降低了側向加速度和轉向盤轉角的抖動,分別如圖5和圖6所示。
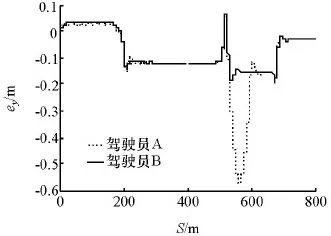
圖4 側向偏移量

圖5 側向加速度
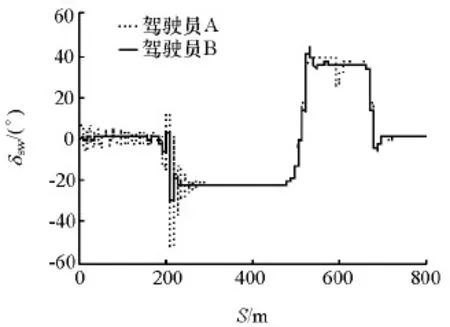
圖6 轉向盤轉角
2 車道偏離輔助控制器
基于車道跟蹤運動學模型[20]設計LDAS期望橫擺角速度:
(2)
式中:yL為預瞄點側向偏移量,m;v為車輛質心速度,m/s;β為車輛質心側偏角,rad;Δψ為方向角誤差,rad;γ為車輛橫擺角速度,rad/s。假設橫擺角速度γ作為控制輸入。由于狀態變量v,β和Δψ均未知,令q=v(β+Δψ),式(2)可轉換為
(3)
式中:狀態向量x=[yL,q]T;系統輸入u=γ;系統輸出向量y=[yL,q]T。
根據式(2),期望橫擺角速度可由下式確定:
γd=-[v(β+Δψ)+KyL]/ls,K>0
(4)

(5)
式(5)為一卡爾曼濾波器,因此對于測量信號的噪聲具有很好的濾波作用。

(6)

(7)
2.1 轉角PID控制器
轉向控制示意圖如圖7所示,根據跟蹤目標路徑的期望橫擺角速度γd與實際橫擺角速度γ之差,由PID控制器輸出期望的轉向盤轉角為
(8)
式中:Δγ=γd-γ;控制器參數整定為Kp=10,Ki=0.15,Kd=0.02。預瞄距離對LDAS控制器的車道跟蹤性能影響也很大,設定簡單的預瞄距離觀測器ls=vxt-15,lsmin=5m,lsmax=18m,t=1s,通過縱向車速控制來消除道路曲率的變化對車道跟蹤性能的影響。
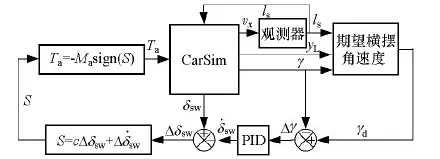
圖7 轉向控制示意圖
2.2 滑模轉矩控制器
EPS系統的主要作用是提供助力減輕駕駛員負擔(提高舒適性)并增加轉向“路感”。基于EPS系統還可進一步開發輔助駕駛功能,如圖8所示,LDAS和LKAS就是基于EPS系統功能的擴展。本文中LDAS是基于管柱助力EPS系統,減速比為N的減速機是LDAS的執行器。Ta為轉向柱上的LDAS輔助力矩,令Td為駕駛員力矩,δsw為轉向盤轉角,Jsw為轉向柱轉動慣量,csw為轉向柱阻尼,ksw為轉向柱剛度;令δm為電機轉角,Jm為電機軸轉動慣量,cm為電機軸阻尼,km為電機軸剛度;令mr為齒條的當量質量,cr為齒條的當量阻尼,kr為齒條的當量剛度,rp為小齒輪分度圓半徑,xr為齒條位移,Fr為作用到齒條上的外力。轉向柱上的轉矩方程、電機輸出軸上的轉矩方程、齒條上的力方程和轉向系統模型參數數值詳見文獻[17]。
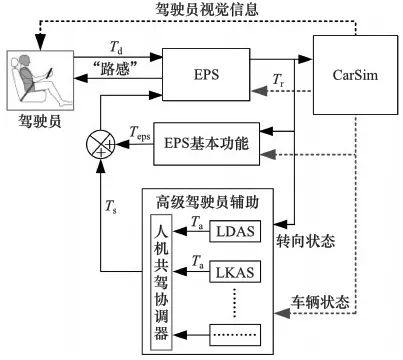
圖8 集成LDAS功能的EPS系統
EPS系統減速機為一對嚙合的蝸輪蝸桿副,在理想情況下,轉動慣量和摩擦均忽略不計。顯然,蝸輪蝸桿副中轉矩Tm(t)和Ta(t),轉角δm(t)和δsw(t),角速度ωm(t)和ωsw(t),蝸桿的頭數z1和蝸輪的齒數z2存在如下關系:
(9)
因此可把轉動慣量、黏性阻尼、剛度、轉矩和角位移從蝸輪蝸桿副的一側折算到另一側。從而可得出減速機輸入軸折算到轉向管柱的下列各參數:轉動慣量N2Jm,黏性阻尼系數N2cm,扭轉剛度系數N2km,轉矩NTm,角位移δm/N。則折算后,轉向柱上的等效轉動慣量為Jeq=Jsw+N2Jm,等效阻尼系數ceq=csw+N2cm,轉管柱上的等效剛度為
由此可得轉向系統等效動力學模型的狀態方程:
(10)
其中B1=[0,e,0,0]T

(11)
通過控制使式(11)的運動限制于滑模面S=0,c為固定增益,由于未知參數和駕駛員力矩等擾動,為了鎮定不確定性,令
Ta=-Masign(S),Ma>0
(12)
定義Lyapunov函數來分析Δδsw穩定性:

Ta/Jeq]≤-Ma|S|/Jeq+|f(·)‖S|
(13)
Ma>max(|f(·)|)/Jeq
(14)
因此,式(13)和式(14)意味著對于一正的標量ξ,有
(15)
從而S在有限時間內收斂于零,而轉向角誤差Δδsw通過所指定的參數c趨向于零。為使滑模控制器實現連續控制,用一個連續函數近似替代非連續的切換函數:
(16)
3 LDAS人機共駕策略
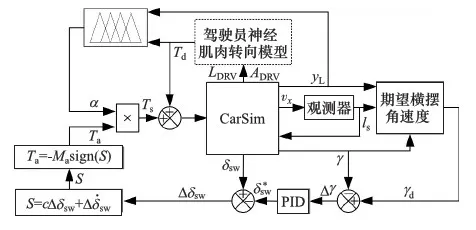
圖9 人機共控結構框圖
LDAS與LKAS兩個系統主要不同點是后者連續運行實現車道保持而前者基于跨道閾值等臨界條件才激活。圖9為LDAS人機共駕控制結構圖,基于閾值設定的危險準則使得人機共控系數α介于0與1之間動態切換。由于基于預瞄點側向偏移量yL和駕駛員力矩Td與車輛偏離車道程度的關系不能精確描述,而模糊控制理論是解決這一問題的有效途徑。在系統運行中,不斷檢測預瞄點側向偏移量yL和駕駛員力矩Td,再根據模糊控制規則,對人機共控系數α進行在線調整。

人機共駕模糊控制器的輸入為預瞄點側向偏移量yL和駕駛員力矩Td,輸出為人機共控系數α[21]。yL∈[-0.4,0.4]m,Td∈[-6,6]N·m。yL和Td模糊子集均設為{NB,NM,Z,PM,PB},分別代表側向偏移量和駕駛員力矩的負大、負中、零、正中、正大5個狀態。共控系數α∈[0,1],模糊子集為{Z,S,M,L,XL},分別代表共控系數零、小、中、大、較大5個狀態。模糊控制器輸入隸屬度函數分別如圖10和圖11所示,輸出隸屬度函數如圖12所示。人機共駕模糊規則如表2所示,該模糊控制規則為駕駛員行為和車輛位置提供了一個簡單的描述。
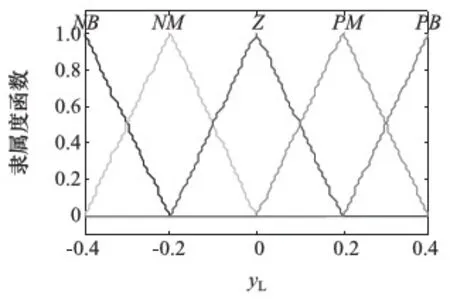
圖10 yL的隸屬度函數
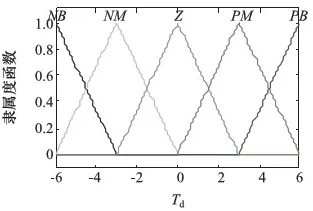
圖11 Td的隸屬度函數
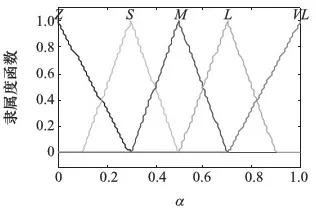
圖12 α的隸屬度函數
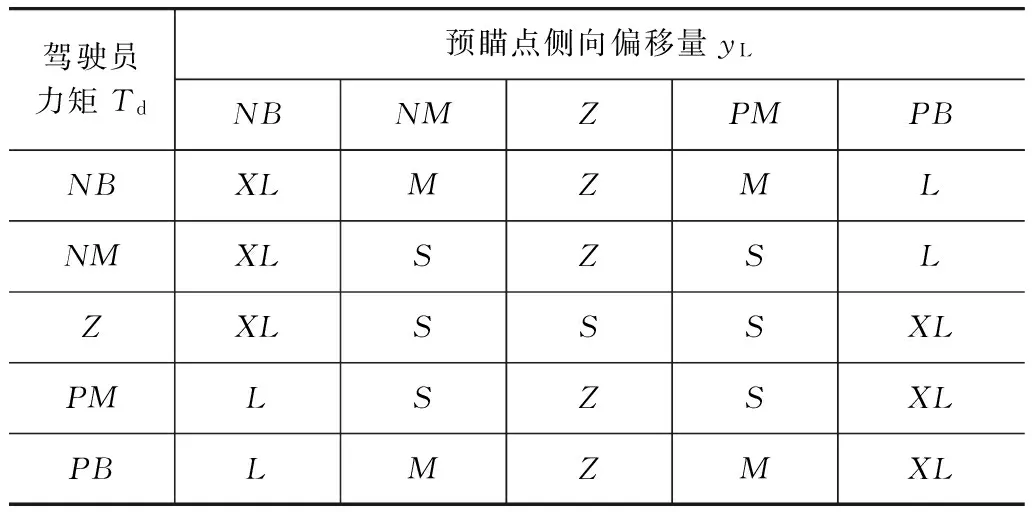
表2 共控系數的模糊規則表
4 LDAS人機共駕仿真
為了評價所提出的LDAS人機共駕的性能,基于CarSim/Simulink仿真驗證所提出控制策略的有效性。仿真的車輛模型為E-Class/Sedan,道路模型為Alt3 from FHWA,跟蹤路徑如圖13所示,路面附著系數μ=0.85,彎道的曲率半徑近似為155m,道路曲率如圖14所示。車輛由直道進入彎道,車速設定為90km/h,從道路模型200m處開始仿真。設定LDAS滑模轉矩控制器參數:c=6,Ma=10。模擬駕駛員由于疲勞駕駛或注意力不集中沒有意識到前方彎道雙手離開了轉向盤3.5s,然后駕駛員和LDAS控制器獨自和共同糾正車輛恢復到正常車道。駕駛員模型A模擬疲勞駕駛的駕駛員,駕駛員模型B模擬注意力高度集中的駕駛員,通過駕駛員A和B仿真LDAS人機共駕性能,駕駛員A的輸出力矩Td∈[-6,6]N·m,駕駛員B的輸出力矩Td∈[-9,9]N·m。
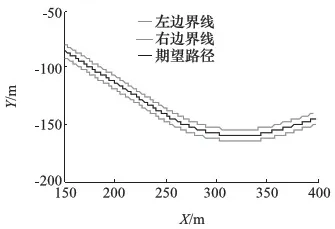
圖13 跟蹤路徑
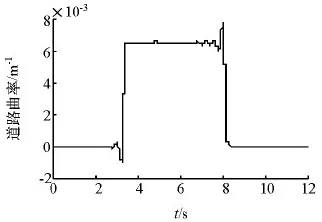
圖14 道路曲率
駕駛員力矩Td如圖15所示,跨道距離dDLC如圖16所示,駕駛員A失去了對車輛的控制,車輛嚴重偏離了車道,駕駛員B最小跨道距離為0.29m,也能糾正車輛恢復到正常車道,LDAS控制器最小跨道距離為0.56m,LDAS+A最小跨道距離為0.55m,LDAS+B最小跨道距離為0.61m。可以得出不管駕駛員是疲勞駕駛狀態還是注意力高度集中狀態,人機共駕均能糾正車輛恢復到正常車道。如果車輛偏離車道駕駛員不接管轉向盤LDAS控制器也能糾正車輛恢復到正常車道,從而保證了車輛的行駛安全性。
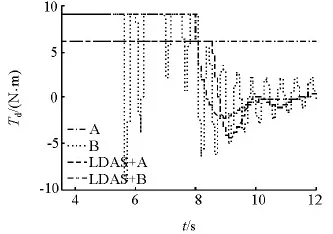
圖15 駕駛員力矩
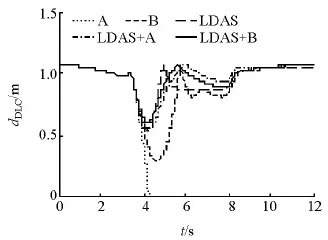
圖16 跨道距離
轉向盤轉角如圖17所示,很明顯,駕駛員B雖能糾正車輛恢復到正常車道,但轉向盤轉角出現了嚴重的抖動,無法保證車輛的乘坐舒適性。
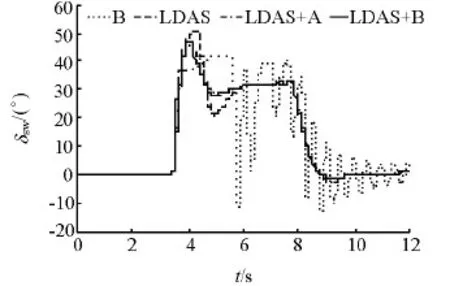
圖17 轉向盤轉角
人機共駕的共控系數如圖18所示,駕駛員A在9.4s之后共控系數α恢復到0.3左右,整個人機糾正過程耗時5.9s;而駕駛員B在8.15s之后共控系數α恢復到0.3左右,整個人機糾正過程耗時4.65s。此后駕駛員擁有更多的轉向控制權,從而實現了LDAS從人機共駕到駕駛員控制平滑切換。
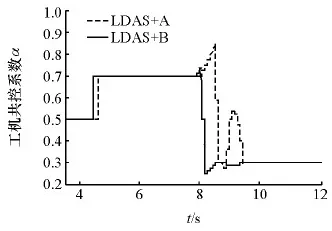
圖18 人機共控系數
LDAS控制器的輔助力矩和共控力矩分別如圖19和圖20所示,注意力高度集中的駕駛員B的輔助力矩和共控力矩均小于駕駛員A,這也符合人機共駕的設計目標,相當于通過共控系數“讀懂”駕駛員意圖,驗證了LDAS人機共駕模糊控制器的有效性。橫擺角速度如圖21所示,側向加速度如圖22所示,很明顯對于駕駛員B獨自糾正車輛恢復到正常車道,橫擺角速度和側向加速度出現了很嚴重的抖動,無法保證車輛的乘坐舒適性,而基于LDAS,LDAS+A和LDAS+B整個糾正過程均平穩過渡,超調量較小,均能使車輛平順的通過彎道,保證了車輛的乘坐舒適性,驗證了所提出的人機共駕控制策略的有效性。
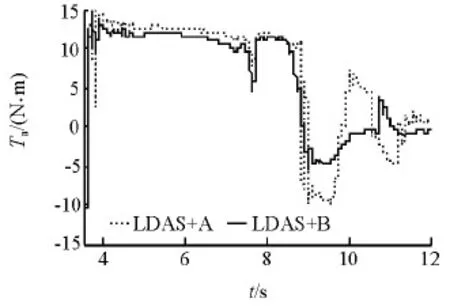
圖19 輔助力矩

圖20 共控力矩
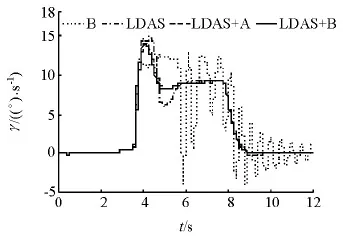
圖21 橫擺角速度
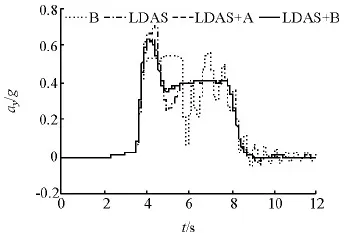
圖22 側向加速度
5 硬件在環試驗
通過CarSim/LabVIEW RT硬件在環臺架試驗來驗證控制策略的可行性,硬件在環仿真試驗采用的機箱為NI PXIe-1071,數據采集卡為PXIe-6361,控制器為PXIe-8840,CAN卡為PXI-8512/2。通用型交流伺服系統和減速器用來給轉向管柱施加實時負載。為實現硬件在環LDAS試驗,基于某車型的EPS系統自行開發的控制器替代原裝的控制器,硬件在環試驗控制結構圖如圖23所示。
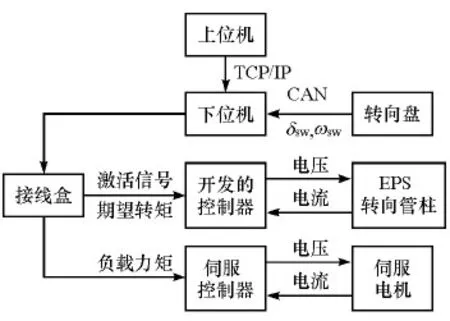
圖23 硬件在環試驗平臺
硬件在環試驗條件同上,3.6s人機共駕介入,跨道距離如圖24所示,最小值為0.28m;轉向盤轉角如圖25所示,最大值為55°;輔助力矩和共控力矩分別如圖26和圖27所示,輔助力矩最大值為15.4N·m,而共控力矩最大值則為7.7N·m,由于駕駛員的合理介入減小了輔助力矩;駕駛員力矩如圖28所示,在3.6s意識到車輛即將偏離車道,迅速施加了一個高達7.5N·m左右的糾正力矩;側向加速度如圖29所示,側向加速度最大值為0.75g,輪胎側向力已處于非線性區;橫擺角速度如圖30所示,橫擺角速度最大值為16.6°/s。綜上可見,所提出的LDAS人機共駕控制策略能夠及時糾正車輛恢復到正常車道,避免了駕駛員由于疲勞駕駛或注意力不集中沒有意識到前方出現彎道而出現的車道偏離事故。
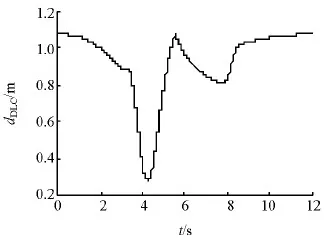
圖24 跨道距離
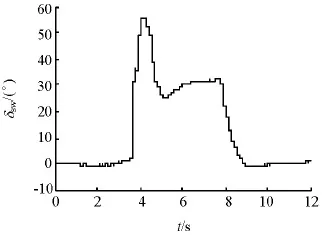
圖25 轉向盤轉角
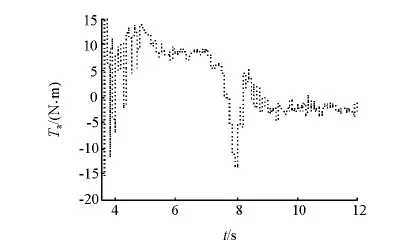
圖26 輔助力矩
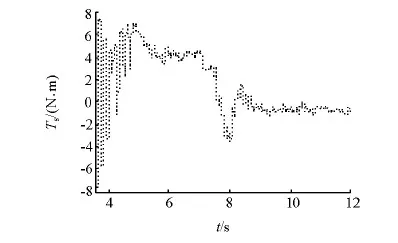
圖27 共控力矩
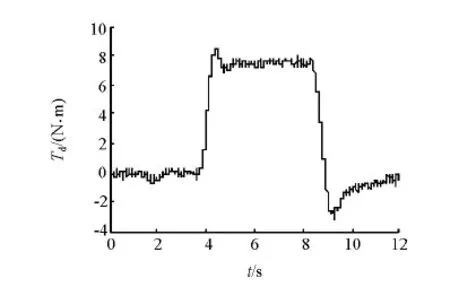
圖28 駕駛員力矩
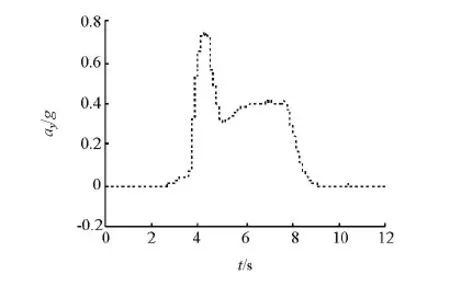
圖29 側向加速度
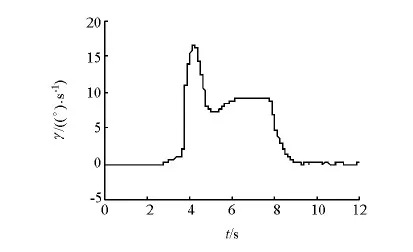
圖30 橫擺角速度
6 結論
基于駕駛員預瞄點的側向偏移量和預瞄區域面積,并考慮駕駛員的神經肌肉特性建立了路徑跟蹤駕駛員轉向模型,根據車速調整駕駛員的預瞄距離,并基于CarSim/Simulink仿真驗證了駕駛員處于疲勞駕駛狀態和注意力高度集中狀態的路徑跟蹤性能。
設計了LDAS期望橫擺角速度觀測器,并基于期望值與實際值之差設計了LDAS轉角PID控制器,整定了PID控制器參數。建立了轉向系統等效動力學模型,并基于滑模理論設計了不依賴于駕駛員力矩和輪胎回正力矩等不確定條件的LDAS魯棒轉矩控制器。
由于預瞄點的側向偏移量和駕駛員力矩與車輛偏離車道程度的關系不能精確描述,所以設計了LDAS人機共駕模糊控測器,并確定了模糊控制規則,并基于CarSim/Simulink和CarSim/LabVIEW RT硬件在環仿真對比了人機共駕的糾正車輛恢復到正常車道的能力,結果表明,所提出的車輛偏離車道人機共駕控制策略能及時糾正車輛恢復到正常車道,并能保證切換過程的平順性。本文中僅進行硬件在環試驗驗證,今后尚須進行實車試驗。
[1] VAA T, PENTTINEN M, SPYROPOULOU I. Intelligent transport systems and effects on road traffic accidents: state of the art[J]. IEEE Transactions on Intelligent Transportation Systems,2007,1(2):81-88.
[2] MAMMAR S, GLASER S, NETTO M. Time to line crossing for lane departure avoidance: A theoretical study and an experimental setting[J]. IEEE Transactions on Intelligent Transportation Systems,2006,7(2):226-241.
[3] ZHOU Y, XU R, HU X F, et al. A lane departure warning system based on virtual lane boundary[J]. Journal of Information Science & Engineering,2008,24(1):293-305.
[4] HONG T, KWON J, LEE K, et al. Development of a driver’s intention determining algorithm for a steering system based collision avoidance system[C]. SAE Paper 2013-01-0054.
[5] LEE J, YI K. Development of a coordinated strategy of steering torque overlay and differential braking for unintended lane departure avoidance[C]. SAE Paper 2012-01-0281.
[6] 黃智,吳乙萬,劉劍,等.高速車輛車道偏離輔助控制研究[J].機械工程學報,2013,49(22):157-163.
[7] 張海林,羅禹貢,江青云,等.基于電動助力轉向的車道保持系統[J].汽車工程,2013,35(6):526-531.
[8] KATZOURAKIS D, ALIREZAEI M, KAZEMI R, et al. Shared control for road departure prevention[C]. IEEE International Conference on Systems, Man, and Cybernetics(SMC), October 9-12,2011, Anchorage, Alaska, USA,2011:1037-1043.
[9] ROSSETTER E J, GERDES J C. Lyapunov based performance guarantees for the potential field lane keeping assistance system[J]. Journal of Dynamic Systems, Measurement and Control, Transactions of the ASME,2006,128(3):510-522.
[10] DOUMIATI M, SENAME O, DUGARD L, et al. Integrated vehicle dynamics control via coordination of active front steering and rear braking[J]. European Journal of Control,2013,19:121-143.
[11] PILUTTI T, ULSOY G, HROVAT D. Vehicle steering intervention through differential braking[C]. Proceedings of the American Control Conference, Jun 21-23,1995, Seatle,WA, USA,1995:1667-1671.
[12] LEE J, CHOI J, YI K, et al. Lane-keeping assistance control algorithm using differential braking to prevent unintended lane departures[J]. Control Engineering Practice,2014,23:1-13.
[13] ENACHE N M, MAMMAR S, NETTO M, et al. Driver steering assistance for lane-departure avoidance based on hybrid automata and composite Lyapunov function[J]. IEEE Transactions on Intelligent Transportation Systems,2010,11(1):28-39.
[14] MULDER M, ABBINK D, BOER E. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers[C]. IEEE International Conference on Systems, Man and Cybernetics(SMC), October 12-15,2008,Singapore,2008:804-809.
[15] LOUAY S, PHILIPPE C, FABIEN C. Shared steering control between a driver and an automation: Stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems,2013,14(2):974-983.
[16] SENTOUH C, DEBERNARD S, POPIEUL J, et al. Toward a shared lateral control between driver and steering assist controller[C]. Analysis, Design, and Evaluation of Human-Machine Systems, September 1-3, 2010, Université de Valenciennes et du Hainaut Cambrésis, France,2010:404-409.
[17] 談東奎,陳無畏,王家恩,等.基于人機共享和分層控制的車道偏離輔助系統[J].機械工程學報,2015,51(22):98-110.
[18] PICK A J, COLE D J. Neuromuscular dynamics in the driver vehicle system[J]. Vehicle System Dynamics,2006,44(S1):624-631.
[19] BOLIA P, WEISKIRCHER T, MüLLER S. Driver steering model for closed-loop steering function analysis[J]. Vehicle System Dynamics,2014,52(Supplement):16-30.
[20] SOUALMI B, SENTOUH C, POPIEUL J, et al. Automation-driver cooperative driving in presence of undetected obstacles[J]. Control Engineering Practice,2014,24:106-119.
[21] MERAH A, HARTANI K, DRAOU A. A new shared control for lane keeping and road departure prevention[J]. Vehicle System Dynamics,2015,54(1):1-16.
“汽車輕量化技術與產品巡展-北汽福田站”成功舉辦
2017年6月28-29日,由汽車輕量化技術創新戰略聯盟(以下簡稱“輕量化聯盟”)主辦、北汽福田汽車股份有限公司承辦的“汽車輕量化技術與產品巡展-北汽福田站”活動在福田研究總院舉辦。中汽學會副秘書長、輕量化聯盟秘書長張寧,吉林大學教授、輕量化聯盟專家委主任王登峰,北汽福田副總裁陳青山、研究總院常務副院長張志亮、副院長高巖等領導出席巡展活動,湯臣汽車零部件、凌云股份、中材汽車復合材料、杰事杰新材料、北汽模塑、大葉智能科技、彭瑞信息技術、亞威創科源、鑫精合等9家企業攜近40件輕量化零部件參展。
本次巡展活動由中汽學會輕量化研究部部長、輕量化聯盟副秘書長楊潔主持,張寧秘書長、張志亮常務副院長致辭,參展的展品涉及工程塑料后尾門、動力電池包上蓋、3D打印、輕量化管路、復合材料板簧、載重汽車輕量化制動器、載重汽車輕量化輪轂等輕量化零件和技術。在進行產品展示的同時,還安排了特邀專家和參展企業的技術交流報告,特別邀請了中汽學會技術部副部長趙立金、吉林大學教授王登峰分別就節能與新能源汽車技術路線圖、車身參數化輕量化技術在商用車中的應用進行了交流。各參展企業結合攜帶的零部件,圍繞載重汽車底盤懸架關鍵零部件輕量化制造技術、壓鑄車身零部件設計與性能測試、3D打印技術、復材部件的精準化聯合仿真和輕量化精益設計、復合材料在商用車的應用、激光切割技術等分別做了詳細的報告。
本次巡展活動吸引了福田商用車超過150名相關工程師的參與,在福田研究院先行技術部、材料工程所以及相關專業部門的大力支持下,取得了預期效果,受到活動參與各方的好評。
Man-machine Shared Driving Based Lane Departure Avoidance Control
Wang Xuanyao1,2, Wang Qidong1,2, Gao Zhengang1& Wang Jiaen1
1.SchoolofAutomotiveandTrafficEngineering,HefeiUniversityofTechnology,Hefei230009;2.SchoolofMechanicalEngineering,AnhuiUniversityofScienceandTechnology,Huainan232001
A two layer driver steering prediction model is proposed, in which the first layer embodies path following characteristic based on driver visual previewed information, the second layer reflects driver’s steering behaviors based on driver neuromuscular model, and the path tracking performances of driver in different states are compared by using CarSim/Simulink. The desired yaw rate observer and the steering wheel angle PID controller in LDAS are designed and the equivalent dynamics model for steering system is established, with robust torque controller of LDAS designed based on sliding mode theory. Due to the relationship of the degree of lane departure with the lateral offset of previewed point and driver torque can’t accurately be described, the fuzzy controller for man-machine shared driving in LDAS is designed based on fuzzy control theory. A simulation with CarSim/Simulink and a hardware-in-the-loop test with CarSim/LabVIEW RT are conducted to compare the rectification ability of vehicle in lane departure by driver, LDAS controller and man-machine shared driving respectively. The results show that the proposed control strategy for man-machine shared driving can timely rectify lane departure and make vehicle back to normal lane, while ensuring smooth switching from man-machine shared control to driver control.
lane departure; driver model; man-machine shared driving; shared control coefficient
10.19562/j.chinasae.qcgc.2017.07.018
*國家自然科學基金(51175135和51405004)資助。
汪選要,副教授,博士研究生,E-mail:xuanyaowang@126.com。
原稿收到日期為2016年7月20日,修改稿收到日期為2016年9月2日。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
