基于DP-ECMS的插電式混合動力城市客車能量管理策略研究*
2017-08-09 02:31:09解少博
汽車工程 2017年7期
關鍵詞:策略
解少博,陳 歡,劉 通,魏 朗
(1.長安大學汽車學院,西安 710064; 2.北京理工大學,電動車輛國家工程實驗室,北京 100081)
?
基于DP-ECMS的插電式混合動力城市客車能量管理策略研究*
解少博1,2,陳 歡1,劉 通1,魏 朗1
(1.長安大學汽車學院,西安 710064; 2.北京理工大學,電動車輛國家工程實驗室,北京 100081)
以一款氣-電型插電式混合動力城市客車(PHEV)為研究對象,針對能量管理中的最小能耗問題分別應用電量消耗-電量維持(CD-CS)策略、動態規劃(DP)、等效能耗最小化策略(ECMS)和自適應等效能耗最小化策略(A-ECMS)進行中國典型城市工況仿真。在對上述幾種能量管理策略仿真結果分析的基礎上,提出一種將動態規劃與等效能耗最小化策略相結合的DP-ECMS策略。結果表明:DP-ECMS的能耗特性接近動態規劃,同時具有等效能耗最小化策略的實時性特點,為PHEV的能量管理提供了參考。
PHEV; 能量管理; 動態規劃; 等效能耗最小化; DP-ECMS策略
前言
在新能源汽車領域,插電式混合動力汽車(PHEV)既能像純電動汽車一樣節能減排,又能克服駕乘人員因車輛續駛里程不足而產生的焦慮,同時還可配置較小功率的發動機,其優點已受到全世界汽車生產廠家和研究機構的廣泛關注。
對PHEV而言,其能量管理策略對整車的能耗和經濟性有重要影響。從能量管理的控制方式來看,主要有以下幾種。一種是基于規則的能量管理策略,如電量消耗-電量維持策略即CD-CS[1-2]、模糊規則[3]等,因其控制邏輯簡單、便于實施,基于規則的能量管理策略已廣泛應用于成批生產的新能源車輛。另一種是基于優化理論的能量管理策略,如基于最優理論中動態規劃算法(DP)的能量管理策略[4-5],它能保證給定工況下的全局最優性;還有基于等效能耗最小化的能量管理策略(ECMS)[6-7],該策略不用像動態規劃那樣做大規模的計算以求得最優的電池放電軌跡,而是計算當前步長各能量源之間最優的能量分配關系,可顯著降低計算量從而提高控制的實時性。同時,為使ECMS更好地適應車輛運行的工況,文獻[8]中還展開了對自適應等效能耗最小化策略A-ECMS的研究。另外,還有應用龐特里亞金最小值原理[9-10]和模型預測控制[11]等不同優化方法得到的能量管理策略。
基于規則的能量管理策略,無法從理論上保證能耗的最優性,規則的制定也有賴于開發者的經驗;動態規劃雖然有全局最優性,但計算量巨大,如果狀態變量較多,且網格劃分過細,計算量會急劇增大,甚至發生所謂“維數災難”[12];而ECMS和A-ECMS的性能又極大地依賴等效因子等參數。總之,DP和ECMS各有其優缺點,如何有效結合DP和ECMS兩者的優點進行能量管理策略設計,成為本文探討的重點。
本文中基于某氣-電型插電式混合動力城市客車,分別應用CD-CS,DP,ECMS和A-ECMS策略對車輛在中國典型城市工況下進行仿真,并比較各策略的優缺點;在此基礎上提出一種結合動態規劃和等效能耗最小化策略的DP-ECMS策略;最后對上述幾種能量管理策略進行了對比并得出結論。
1 插電式混合動力城市客車原型車
1.1 整車動力系統結構和參數
所研究的PHEV為一款長12m城市客車,發動機和ISG電機組成APU單元,后橋為雙電機輪邊驅動橋,驅動電機通過減速器與車輪連接,動力系統結構如圖1所示,整車和電池主要參數見表1。
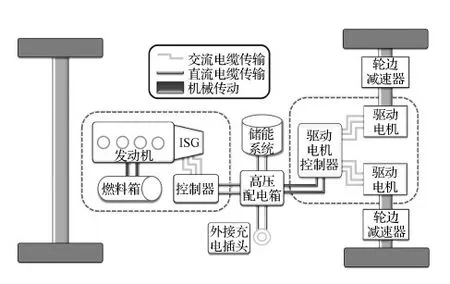
圖1 整車動力系統結構圖
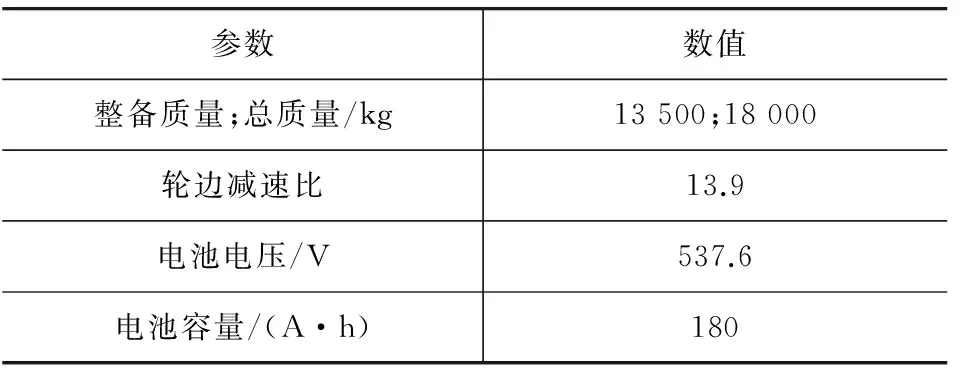
參數數值整備質量;總質量/kg13500;18000輪邊減速比13.9電池電壓/V537.6電池容量/(A·h)180
1.2 動力系統數學模型
1.2.1 發動機和ISG電機模型
發動機為一款排量為4.2L的天然氣發動機,標定功率為88kW,最高轉速為2 800r/min,最大轉矩為380N·m,其氣耗Map如圖2所示。
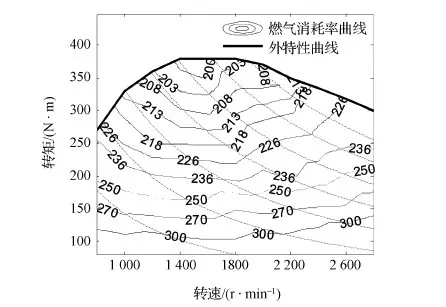
圖2 發動機氣耗圖
ISG電機為永磁同步電機,額定功率(峰值功率)為80(130)kW,最高轉速為6 000r/min,額定轉矩(峰值轉矩)為350(600)N·m,效率特性如圖3所示。
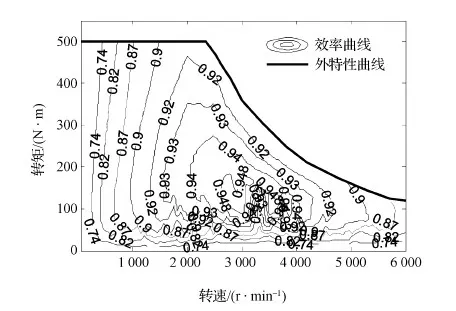
圖3 ISG電機效率特性圖
1.2.2 牽引電機模型
雙側輪邊電機驅動為永磁同步電機,額定功率(峰值功率)為85(150)kW,額定轉速(峰值轉速)為2 500(6 000)r/min,額定轉矩(峰值轉矩)為320(650)N·m。其效率特性如圖4所示。
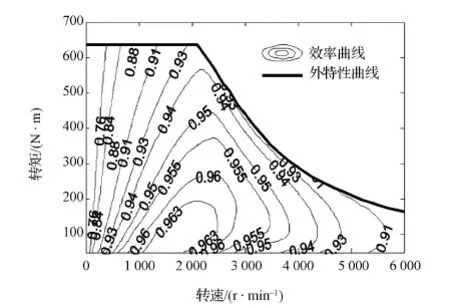
圖4 輪邊電機效率特性圖
2 能量管理策略分析
分別應用CD-CS,DP,ECMS和A-ECMS能量管理策略對PHEV進行中國典型城市公交工況[13]仿真,電池SOC初值設為0.8。另外,除計算各策略的百公里氣耗和電耗,還計算其綜合成本:
(1)
式中:cf為天然氣單價,3.7元/m3;ce為電網用電單價,0.8元/(kW·h);T為運行時間;Pe和Pbat分別為發動機功率和電池輸出功率;f1(·)和f2(·)分別為發動機和電池的能量消耗率函數。
2.1 基于CD-CS的能量管理策略
設置當電池SOC降低至0.28時APU開啟,進入電量維持階段,且SOC保持在0.28~0.35之間。APU選擇恒功率工作模式,向外輸出功率40kW,功率點選擇APU功率輸出最佳效率曲線上的點,轉速為1 238r/min,轉矩為309N·m。
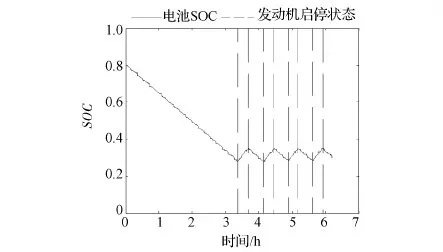
圖5 電池SOC變化和發動機工作狀態
仿真得到的電池SOC和發動機工作狀態見圖5,百公里氣耗和電耗分別為15.56m3和48.4kW·h,綜合成本為96.29元,見表2。
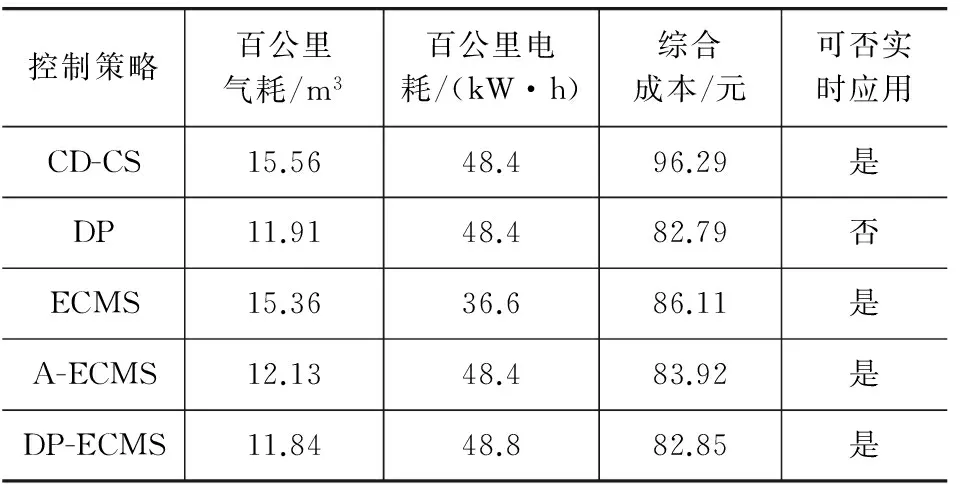
表2 不同策略的百公里能耗和實時性比較
2.2 基于DP的能量管理策略
針對所研究的PHEV,基于全局能耗最小化的動態規劃問題的模型為

(2)
式中:xq為對SOC范圍進行劃分得到的第q個值點;電池功率Pbat為控制輸入;ui為第i個控制輸入;U為控制變量集合;f(·)為第k步當狀態變量為xq且輸入為ui時求得的第k+1步的SOC;g(·)為當前步的能耗。
圖6為電池SOC的變化曲線。由圖可見,在行程終點電池SOC值達到了期望的下限。百公里氣耗和電耗分別為11.91m3和48.4kW·h,綜合成本為82.79元,見表2。對比可知,基于DP策略的成本明顯低于CD-CS策略成本。
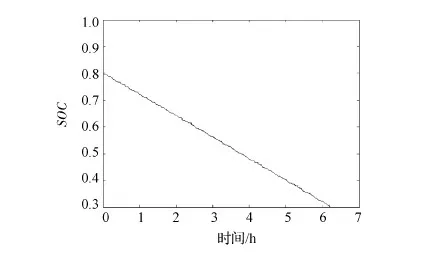
圖6 基于DP策略電池SOC變化
2.3 基于ECMS的能量管理策略
ECMS可認為是基于龐特里亞金最小原理簡化而來的策略[9],目標函數為
(3)

根據工況和初始SOC選擇s0為2.98,由圖7可見,電池SOC也近似呈線性變化,但在行程的終點,電池SOC沒有達到預期的下限,即電池組還存有一定的剩余電量。因為APU和電池功率只選擇瞬時的最優分配關系,ECMS無法如DP一樣達到全局最優,且結果極大地依賴于s0的選擇。基于ECMS的百公里氣耗為15.36m3,電耗為36.6kWh,綜合成本為86.11元,介于CD-CS和DP的綜合成本之間,見表2。
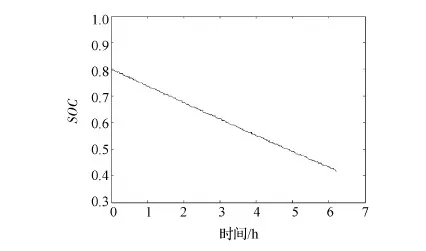
圖7 基于ECMS策略電池SOC變化
2.4 基于A-ECMS的能量管理策略
為使電池組能在整個行程中充分放電,可通過調整等效因子來實現,從而使ECMS進化為自適應ECMS即A-ECMS,其目標函數[9]為
(4)式中s(t)為自適應等效因子。為了在行程終點使電池SOC達到期望值,要求等效因子隨行程不斷變化從而使電池SOC能跟蹤參考SOC的軌跡。為此,可選擇控制方法進行SOC的軌跡跟蹤,本文中選擇比例控制軌跡跟蹤方法,s(t)的表達式為
(5)
式中:sinitial為初值;KP為比例系數;SOCref為參考SOC軌跡。隨行程線性變化的SOCref可表達為
(6)
式中:SOCinitial為電池SOC初值;SOCfinal為行程終點期望的SOC;Dall為總行程;d(t)為當前累計行程。
圖8為自適應等效因子的變化過程。由圖可見,其值在整個行程中不斷地進行調整以適應行程的變化。從圖9中電池SOC和參考值的對比可見,電池SOC基本跟蹤了參考值;另外,基于A-ECMS策略的SOC軌跡基本和DP一致,即呈近似線性變化趨勢,同樣為混合放電過程,百公里氣耗和電耗分別為12.13m3和48.4kW·h,綜合成本為83.92元,明顯低于ECMS策略的成本,如表2所示。A-ECMS的不足之處在于計算結果依賴于等效因子初值和比例系數的選擇。
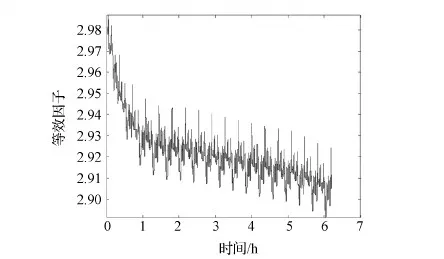
圖8 A-ECMS得到的自適應等效因子
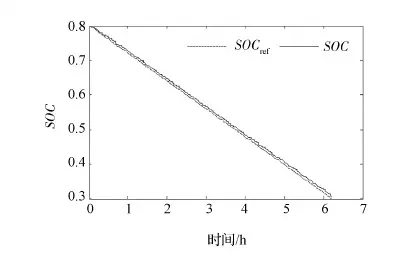
圖9 A-ECMS得到的電池SOC和參考SOC
3 基于DP-ECMS的能量管理策略
考慮到DP無法進行實時應用,ECMS只能實現瞬時等效能耗最小化,無法保證全局的能量分配達到最優,而A-ECMS的性能又極大地依賴于等效因子初值和比例系數等的選擇。因此,本文中提出一種利用DP的全局最優性并具有ECMS實時特點的DP-ECMS能量管理策略。其原理為:用DP每一步的計算結果去匹配最優的等效因子s,最終形成行程、電池SOC關于等效因子s的三維表格,最后利用查表型ECMS實現PHEV的能量管理。
假設整個行程分為K步,SOC工作范圍劃分為Q個網格點,車輛需求功率Pr可表達為
Pr=Papu+Pbat
(7)

具體步驟描述如下。
3.1 DP計算
應用DP,求出第k步第q個SOC網格點下累計的最小能耗Jk(xq),并求出gk從而求出當前的最優功率對[Papu,jPbat,j],j為最優功率對的位置指標,j∈[1,2,…,m]。
3.2 等效因子s的匹配

(8)
圖11為ecost隨著不同等效因子和功率輸出對的變化關系圖。由圖可見,在遍歷所有的功率輸出對時,當等效因子由smin=2.5增長為smax=7時,ecost從增函數變為減函數。

圖11 ecost-等效因子-功率輸出對關系圖
記
(9)
和
(10)

又記
(11)
和
H=[h1h2…hn]T
(12)

siopt=s(iopt)
(13)
(3)將第k步第q個網格點匹配得到的等效因子作為對應元素,從而形成等效因子矩陣,即
Sk,q=siopt
(14)
圖12為得到的步長、SOC和等效因子關系圖。
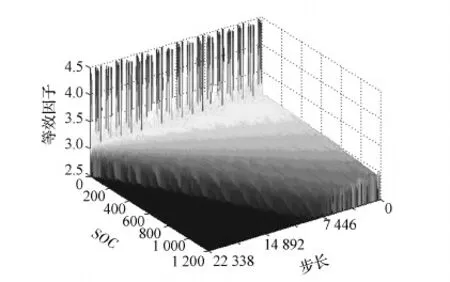
圖12 DP-ECMS得到的等效因子三維圖
3.3 DP-ECMS的形成
基于等效因子矩陣S形成查表型ECMS能量管理策略,即DP-ECMS能量管理策略。
圖13為DP與DP-ECMS得到的SOC變化曲線對比圖。由圖可見,在運行終點SOC達到預期值,與DP保持很接近的放電特征。從表2能耗對比可見,DP-ECMS與DP的能耗十分接近,百公里氣耗和電耗分別為11.84m3和48.8kW·h,綜合成本為82.85元,另外,DP-ECMS可以在離線狀態下求得等效因子Map,其在本質上是一種查表型的ECMS,能夠滿足實時應用的要求。
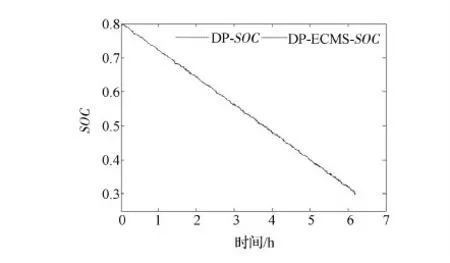
圖13 電池SOC變化曲線
表2從百公里能耗、總成本和實時性角度對5種策略進行對比。由表可見,CD-CS的綜合能耗最大,百公里總成本也最大;DP能夠保證全局的最優性,具有最小的百公里能耗和成本,但DP的計算負擔很重,耗時長,無法實時應用。ECMS依賴于等效因子,并且無法達到最低的能耗和綜合成本;盡管A-ECMS能夠克服ECMS單一等效因子的缺陷且也能實現較低能耗的目標,但其性能依賴于初始等效因子和比例系數等參數的選擇。基于DP-ECMS的能量管理策略充分利用了DP全局最優性的優點,其能耗和綜合成本十分接近DP,又發揮了ECMS便于計算的特點,能進行實時應用。其不足之處在于,DP-ECMS是基于DP得來的能量管理策略,同樣要求預先知道車輛的行駛工況。
4 結論
本文中以一款研發的氣-電型插電式混合動力公交車為研究對象,為優化能量管理策略,分別應用CD-CS,DP,ECMS和A-ECMS策略,得到百公里中國典型城市公交工況仿真結果,從能耗、經濟性和實時性對上述幾種策略的優缺點進行分析,在此基礎上提出一種DP-ECMS能量管理策略。結果表明,該策略能夠實現接近于DP的能耗效果,同時又保持了ECMS的實時性特點,為PHEV的能量管理提供了參考。
[1] GONDER J, MARKEL T. Energy management strategies for plug-in hybrid electric vehicles[J]. SAE World Congress,2007,6(11):5656-5675.
[2] MATTHE R, TURNER L, METTLACH H. Voltec battery system for electric vehicle with extended range[C]. SAE Paper 2011-01-1373.
[3] SCHOUTEN N J, SALMAN M A, KHEIR N A. Fuzzy logic control for parallel hybrid vehicles[J]. IEEE Transaction Control System Technology, 2002, 10(3): 460-468.
[4] BRAHMA A, GUEZENNEC Y, RIZZONI G. Optimal energy management in series hybrid electric vehicles[C]. American Control Conference, 2000:60-64.
[5] HE H W, TANG H L, WANG X M. Global optimal energy management strategy research for a plug-in series-parallel hybrid electric bus by using dynamic programming[J]. Mathematical Problems in Engineering, 2013, Article ID: 708261.
[6] KEULEN T V, MULLEM D V, JAGER B D, et al. Design, implementation, and experimental validation of optimal power split control for hybrid electric trucks[J]. Control Engineering Practice, 2012, 20(5): 547-558.
[7] PAGANELLI G, DELPRAT S, GUERRA T M, et al. Equivalent consumption minimization strategy for parallel hybrid powertrains[C]. Vehicular Technology Conference, IEEE 55th, 2002:2076-2081.
[8] MUSARDO C, RIZZONI G, GUEZENNEC Y, et al. A-ECMS: an adaptive algorithm for hybrid electric vehicle energy management[J]. European Journal of Control, 2005, 11(4): 509-524.
[9] KIM N, CHA S, PENG H. Optimal control of hybrid electric vehicles based on Pontryagin’s minimum principle[J]. IEEE Transactions on Control Systems Technology, 2011, 19(5): 1279-1287.
[10] HOU C, OUYANG M G, XU L F, et al. Approximate pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles[J]. Applied Energy, 2014, 115(1): 174-189.
[11] KIM T S, MANIZE C, SHARMA R. Model predictive control of velocity and torque split in a parallel hybrid vehicle[C]. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, 2009:2014-2019.
[12] LIN C C. Modeling and control strategy development for hybrid vehicles[D]. Michigan: University of Michigan, 2004.
[13] 全國汽車標準化委員會. GC/T 759—2006汽車試驗用城市運轉循環[S]. 北京: 中國計劃出版社, 2006.
A Research on Energy Management Strategy for a Plug-inHybrid Electric Bus Based on DP-ECMS Strategy
Xie Shaobo1,2, Chen Huan1, Liu Tong1& Wei Lang1
1.SchoolofAutomotiveEngineering,Chang’anUniversity,Xi’an710064;2.BeijingInstituteofTechnology,NationalEngineeringLaboratoryforElectricVehicles,Beijing100081
Aiming at the issue of minimum energy consumption in energy management, four strategies of charge-depletion-charge-sustaining (CD-CS), dynamic programming (DP), equivalent consumption minimization strategy (ECMS) and adaptive equivalent consumption minimization strategy (A-ECMS) are adopted respectively to conduct a simulation on a gaseous plug-in hybrid electric bus with Chinese city driving cycle. On the basis of analysis on simulation results, a DP-ECMS strategy combining DP with ECMS strategy is put forward. The results indicate that DP-ECMS strategy has an energy consumption characteristic close to that of DP, with a real time feature of ECMS, providing a good reference for the energy management of PHEV.
plug-in hybrid electric vehicle; energy management; dynamic programming; equivalent consumption minimization strategy; DP-ECMS strategy
10.19562/j.chinasae.qcgc.2017.07.002
* 國家863計劃項目(2012AA111106)、陜西省科技統籌創新工程計劃項目(2015zs-06)和汽車測控與安全四川省重點實驗
解少博,副教授,E-mail: 2201020133@163.com。
室開放基金(szjj2014-067)資助。
原稿收到日期為2016年7月18日,修改稿收到日期為2016年9月26日。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50
