多基地聲納系統中目標位置與速度聯合估計*
2017-08-08 03:25:02陳偉偉
傳感器與微系統 2017年8期
陳偉偉, 王 鑫
(江南大學 物聯網工程學院,江蘇 無錫 214122)
?
多基地聲納系統中目標位置與速度聯合估計*
陳偉偉, 王 鑫
(江南大學 物聯網工程學院,江蘇 無錫 214122)
在多基地聲吶系統中,為了利用時間和與多普勒頻率量測同時估計運動目標的位置與速度,設計了一種閉式的估計器。其中,使用誤差修正的方法,改善了傳統的多步加權最小二乘估計器。該估計器只涉及線性加權最小二乘運算,在量測高斯噪聲較小的情況下,均方誤差可以達到克拉美羅下界(CRLB)。通過計算機模擬對比了該估計器的均方誤差與CRLB,并比較了其與傳統多步加權最小二乘估計器的性能,結果表明:估計器的均方誤差小于傳統多步加權最小二乘估計器。
多基地聲納; 時間和; 多普勒頻率; 加權最小二乘; 誤差修正
0 引 言
由于收發裝置合置,單基地聲吶在發現目標的同時,也會暴露自己的位置,隱蔽性比較差。而多基地聲吶,由于收發裝置分置,系統同時具有主動和被動聲吶的工作特點,因而在反隱身、反對抗等方面具有潛在的優越性[1]。
在多基地聲納系統中,獲得目標的方位角、距離、多普勒頻移等測量結果后,經典的維納濾波[2]、最小二乘估計[3,4]、二次規劃[5]、粒子群優化算法[6]可以用來解決目標位置的非線性估計問題。值得一提的是,文獻[7]提出了使用多步加權最小二乘來解決非線性定位問題的方法。對于許多非線性估計問題,該方法可以提供一個簡單的、閉式的有效估計[8]。
在多基地系統中,基于多步加權最小二乘方法,文獻[9]與文獻[10]分別研究了只有一個輻射源與有多個輻射源時的平穩目標的位置估計問題。在非多基地的系統中,文獻[11]與文獻[12]引入了到達信號頻差量測,利用多步加權最小二乘方法同時估計運動目標的位置與速度。
當多基地聲吶系統中存在一個或多個輻射源,且有時間和與多普勒頻率量測時,如何利用多步加權最小二乘方法實現運動目標的位置與速度的聯合估計,是本文研究的主要問題。
1 多基地定位問題描述
假設發射站發出的信號傳播速度c和載頻fc均已知,用τi,j表示ti與sj之間的時間和量測,用fi,j表示ti與sj之間的多普勒頻移。由物理分析可得

(1)
(2)
在不影響結論的前提下,為了表述簡明,將發射站信號載頻fc設定為1 Hz。此時,式(2)可以簡化為
(3)
在實際測量過程中,獲得的觀測量包含噪聲,將觀測量表示成含噪聲的向量形式為
(4)

從定位場景出發可推導出CRLB,作為解決該定位問題的估計器所能達到的理論最優性能[10]。觀測量m的概率密度函數為

(5)
式中K為歸一化常數。
可得該估計問題的CRLB為
(6)
2 位置與速度聯合估計器的設計
假定時間和觀測量與多普勒頻率觀測量噪聲滿足以下條件
(7)
此外,由于二階及二階以上的誤差項都比較小,在估計處理中忽略這些誤差項的影響。
1)將式(1)等號兩邊同時乘以信號速度c,再將等號右邊的‖uo-ti‖-‖ti-sj‖項移到等號左邊,等號兩邊同時平方且忽略誤差二階項的影響,可得

2(ti-sj)Tuo-2(cτi,j+‖ti-sj‖)‖uo-ti‖
(8)
對式(8)求時間的導數,可得



(9)
式中ρuo,ti=(uo-ti)/‖uo-ti‖表示從ti到uo的單位向量;ρuo,sj=(uo-sj)/‖uo-sj‖表示從sj到uo的單位向量。

(10)
式中 矩陣B1,ε1,h1以及G1的具體形式分別為
式中Op×q為p行q列的零矩陣。
式中
式中 0k為k行的零向量。

(11)

在誤差較小的條件下,φ1的協方差矩陣為
(12)
實際計算中,式(11)中的矩陣B1與未知參數γ相關,故首先將矩陣B1中的分塊矩陣b11,b21和b22分別設置為單位矩陣,以此來獲得γ的初始估計值,然后重新計算獲得更加準確的B1。
2)文獻[13]在解決兩步最小二乘估計器的均方根誤差與偏差適應噪聲能力差的問題時,提出了誤差修正的方法。本文利用該方法改善經典多步加權最小二乘在多基地系統中位置、速度聯合估計的性能。
(13)

運用Sorenson的方法[14,15],可以得到
(14)
將步驟(1)中待估計量αi的估計值表示為
(15)
對式(15)等號兩邊同時平方,可以得到
(16)
結合本文的定位場景,根據文獻[16]中的定性分析與輔助模擬實驗,當目標與發射站之間的距離較大時,估計誤差Δαi的二階項(Δαi)2相對一階項2αiΔαi很小,可得
(17)
2) ROS與Rovio的通信部分:ROS發出速度指令至Rovio平臺,Rovio將當前實際速度值發布到Odom主題,以提供給其他節點訂閱。

(18)
對βi進行類似αi的處理,可得
αiΔβi+iΔαi≈i-T+Tti+TΔu+(-ti)TΔ
(19)
(20)
式中 矩陣B2,ε2,h2以及G2的具體形式如下

ε2=Δ1

(21)
(22)
式中 W2的具體形式如下
γ=[φ1(1∶2)Tφ1(M+3)∶(M+4))T]T-φ2
(23)
(24)
需要特別指出的是,如果
(25)
那么,結合式(12)與式(22)可得,式(24)的cov(γ)與式(6)的CRLB吻合,即本文提出的估計器是統計有效的。
3 數值模擬實驗
3.1 單發射站場景
在單發射站場景中,使用1個信號發射站和5個信號接收站來對運動目標進行定位。發射站坐標為t=[-3 000-4 000]Tm,接收站坐標為s1=[-1 000 3 000]Tm,s2=[2 500-1 000]Tm,s3=[-3 000 1 000]Tm,s4=[2 000 -4 000]Tm,s5=[-2 500 -2 000]Tm。圖1(a)給出了單發射站情況下的目標位置和速度估計場景圖。
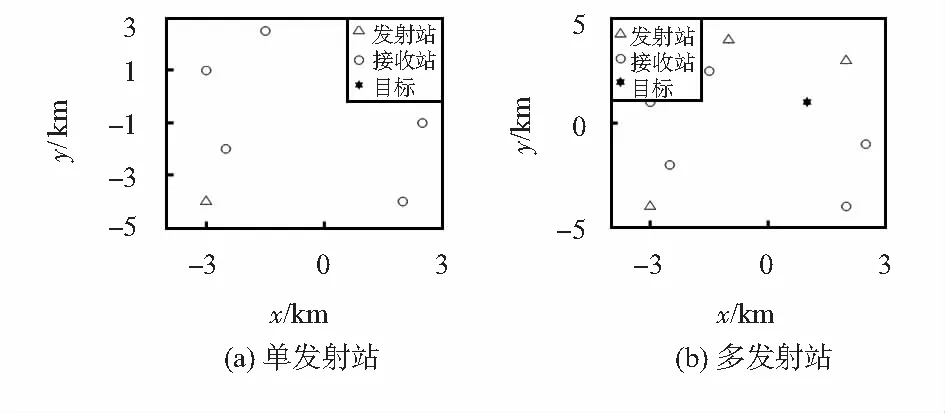
圖1 單發射站場景和多發射站場景
圖2(a)和(b)分別給出了當στ從0.03逐漸增大到0.3時,本文估計算法、傳統多步加權最小二乘法對目標位置和速度估計的均方誤差(MSE)的變化曲線。
如圖2(a)所示,對于目標位置估計,當στ<0.18時,兩種方法的位置估計MSE均能夠很好地達到CRLB;當στ>0.18時,本文方法的位置估計精度能夠達到CRLB,而傳統多步加權最小二乘法的位置估計精度無法達到CRLB,估計性能變差。如圖2(b)所示,對于目標速度估計,當στ<0.18時,兩種方法的速度估計MSE均能夠很好地達到CRLB;當στ>0.18時,本文方法的速度估計精度能夠達到CRLB,而傳統多步加權最小二乘法的速度估計MSE逐漸偏離目標速度估計的CRLB,估計性能逐漸變差。

圖2 目標位置和速度估計的MSE對比
3.2 多發射站場景
在多發射站場景中,使用3個信號發射站和5個信號接收站來對運動目標進行定位。發射站坐標分別為t1=[2 000 3 000]Tm,t2=[-1 000 4 000]Tm,t3=[-3 000 -4 000]Tm。接收站的坐標設定與單發射站場景相同。圖1(b)給出了多發射站情況下的目標位置和速度估計場景圖。
圖3給出了當στ從0.04逐漸增大到0.6時,本文估計算法、傳統多步加權最小二乘法對目標位置和速度估計的均方誤差的變化曲線。
如圖3(a)所示,對于目標位置估計,當στ<0.36時,兩種方法的位置估計MSE均能夠很好地達到CRLB;當στ>0.36時,兩種方法的位置估計精度逐漸偏離CRLB,而傳統多步加權最小二乘法的位置估計精度的偏離幅度明顯大于本文算法的位置估計精度的偏離幅度。
如圖3(b)所示,對于目標速度估計,當στ<0.44時,兩種方法的速度估計MSE均能夠很好地達到CRLB;當στ>0.44時,兩種方法的位置估計精度逐漸偏離CRLB,本文算法的速度估計精度偏離幅度略小于傳統多步加權最小二乘法速度估計的偏離幅度。

圖3 目標位置和速度估計的MEMS對比
仿真結果表明:在單發射站和多發射站兩種情況下,本文提出的目標位置和速度的估計算法優于傳統多步加權最小二乘法。
4 結 論
為解決多基地聲吶系統中運動目標的位置與速度的聯合估計問題,在傳統多步加權最小二乘估計器的基礎上,本文提出了一種新的基于誤差修正的估計器。理論分析與仿真實驗表明:在量測噪聲較小時,該估計器是統計有效的。原理上,本文提出的估計器僅涉及線性加權最小二乘計算,是一個閉式的估計器,不存在局部收斂或者發散的問題。
[1] 肖超超,楊日杰,韓建輝.多基地聲納搜索性能模型研究[J].系統仿真學報,2014,26(6):1315-1319.
[2] Simakov S.Localization in airborne multistatic sonars[J].IEEE Journal of Oceanic Engineering,2008,33(3):278-288.
[3] 葉 永,陳建峰,張 竹,等.基于非線性規劃模型的分布式聲定位算法研究[J].傳感器與微系統,2013,32(2):46-49.
[4] 徐原博,鐘麗鴻,崔 洋,等.基于無線傳感器網絡的極大似然定位法的分析[J].傳感器與微系統,2011, 30(10):37-40.
[5] Chan Y T,Ho K C.Simple and efficient estimator for hyperbolic location[J].IEEE Transactions on Signal Processing,1994,42(8):1905-1915.
[6] 翟彥蓉,黃 歡,張 申,等.改進粒子群優化算法在TDOA定位中的應用[J].傳感器與微系統,2013,32(4):145-148.
[7] 徐 征,曲長文,駱卉子.無需中間變量的多運動站時差定位新算法[J].航空學報,2014,35(6):1665-1672.
[8] Einemo M,So H C.Weighted least squares algorithm for target localization in distributed MIMO radar[J].Signal Processing,2015,115:144-150.
[9] Rui Liyang,Ho K C.Elliptic localization: Performance study and optimum receiver placement[J].IEEE Transactions on Signal Processing,2014,62(18):4673-4688.
[10] Rui Liyang,Ho K C.Efficient closed-form estimators for multi-static sonar localization[J].IEEE Transactions on Aerospace & Electronic Systems,2015,51(1):600-614.
[11] Yu Huagang,Huang Gaoming,Gao Jun,et al.An efficient constrained weighted least squares algorithm for moving source location using TDOA and FDOA measurements[J].IEEE Transactions on Wireless Communications,2012,11(1):44-47.
[12] Yu Huagang,Huang Gaoming,Gao Jun.Approximate maximum likelihood algorithm for moving source localization using TDOA and FDOA measurements[J].Chinese Journal of Aeronautics,2012,25(4):593-597.
[13] 劉 洋,楊 樂,郭福成,等.基于定位誤差修正的運動目標TDOA/FDOA無源定位方法[J]. 航空學報,2015, 36(5):1617-1626.
[14] Huang Jun,Xue Yanbo,Yang Le.An efficient closed-form solution for joint synchronization and localization using TOA[J].Future Generation Computer Systems,2013,29:776-781.
[15] Wang Yinggui,Huang Jun,Yang Le,et al.TOA-based joint synchronization and source localization with random errors in sensor positions and sensor clock biases[J].Ad Hoc Networks,2015,27:99-111.
[16] Xu B,Qi W D,Wei L,et al.Turbo-TSWLS:Enhanced two-step weighted least squares estimator for TDOA-based localization[J].Electronics Letters,2012,48(25):1597-1598.
Joint estimation of position and velocity of target in multistatic sonar system*
CHEN Wei-wei, WANG Xin
(School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China)
A closed-form estimator is designed to estimate the positon and velocity of the target jointly with time sum and Doppler frequency measurements in multistatic sonar system.The esimator improves traditional multi-stage weighted least squares(WLS)estimator with error correction technique.The estimator involves linear WLS computation only and its mean square errors(MSE)can attain Cramer-Rao lower bound(CRLB)when the measurement Gaussian noise is small.Simulations are conducted to compare the MSE of the proposed estimator with the CRLB and compare its performance with that of the traditional multi-stage WLS estimator.The MSE of the proposed estimator is lower than that of the traditional multi-stage WLS estimator.
multistatic sonar; time sum; Doppler frequency; weighted least squares(WLS); error correction
10.13873/J.1000—9787(2017)08—0106—05
2016—08—03
國家自然科學基金資助項目(61304264);江蘇省自然科學基金資助項目(BK20140166)
TN 911.23; TN 953
A
1000—9787(2017)08—0106—05
陳偉偉(1990-),男,碩士研究生,主要研究方向為多基地運動目標定位算法。
王 鑫(1981-),男,通訊作者,博士,講師,主要研究方向為傳感器網絡與多源信息融合,E—mail:wangxin@jiangnan.edu.cn。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
