基于Cruise的增程式客車能量管理策略仿真研究
2017-08-08 03:01:48楊森仇斌塔拉李理光
汽車技術 2017年7期
楊森仇斌塔拉李理光
(1.同濟大學,上海 201804;2.清華大學汽車安全與節能國家重點實驗室,北京 100084)
基于Cruise的增程式客車能量管理策略仿真研究
楊森1仇斌2塔拉2李理光1
(1.同濟大學,上海 201804;2.清華大學汽車安全與節能國家重點實驗室,北京 100084)
以某增程式天然氣混合動力公交車為研究對象,在全電力集中控制策略基礎上,開發了基于電池SOC的預設轉速控制策略和基于電池SOC和車速的預設轉速控制策略,并在AVL Cruise中建立了整車模型及相應控制算法模塊,在中國典型城市公交循環工況下進行了仿真分析。仿真結果表明,所開發的控制策略能夠有效改善公交車在電荷保持階段的氣耗和電量消耗及電量保持階段下的綜合能耗。
1 前言
由于純電動汽車存在電池成本高、充電時間長、純電續駛里程不足等問題[1],因而加裝了輔助動力單元(Auxiliary Power Unit,APU)的增程式電動汽車(Extend?ed-Range Electric Vehicle,E-REV)成為一種重要的過渡技術。目前此類車型所采用的控制策略主要包括模糊控制策略、全局最優控制策略和基于規則的控制策略[2~7],其中模糊控制策略魯棒性較好,在并聯式混合動力汽車上應用較多,全局最優控制策略需要預知循環工況,而基于規則的控制策略由于規則簡單、可靠性高,被廣泛應用于各類混合動力汽車。如,文獻[8]基于ADVISOR建立了燃料電池增程式汽車模型,利用遺傳算法對模糊規則進行了優化,提高了燃料經濟性;文獻[9]利用離散動態規劃算法,針對某并聯混合動力汽車開發了以循環油耗最低為目標的全局最優控制策略;文獻[10]針對一款增程式電動賽車,開發了以行駛所需功率等為參數進行模式切換的規則控制策略,在降低燃料消耗的同時減少了30%的CO2排放。
在使用性能上,盡管模糊控制與全局最優控制使用了較為先進的數學工具,但前者控制規律固定,動態性能較差,而后者不能夠在線應用[11],因此基于規則的控制策略仍有較大的工程意義。為此,本文以某天然氣混合動力公交車為對象,在全電力集中控制策略(All Electric Range-Focused Strategy)基礎上,提出只基于電池SOC和基于SOC及車速的兩種控制策略,通過在AVL Cruise平臺中建立整車模型,對整車等效百公里天然氣消耗量(下稱氣耗量)和全工況綜合能耗進行了仿真研究。
2 車輛參數與模型建立
2.1 車輛基本參數與動力匹配
某天然氣混合動力公交車的基本參數如表1所列,動力性和經濟性設計要求如表2所列。
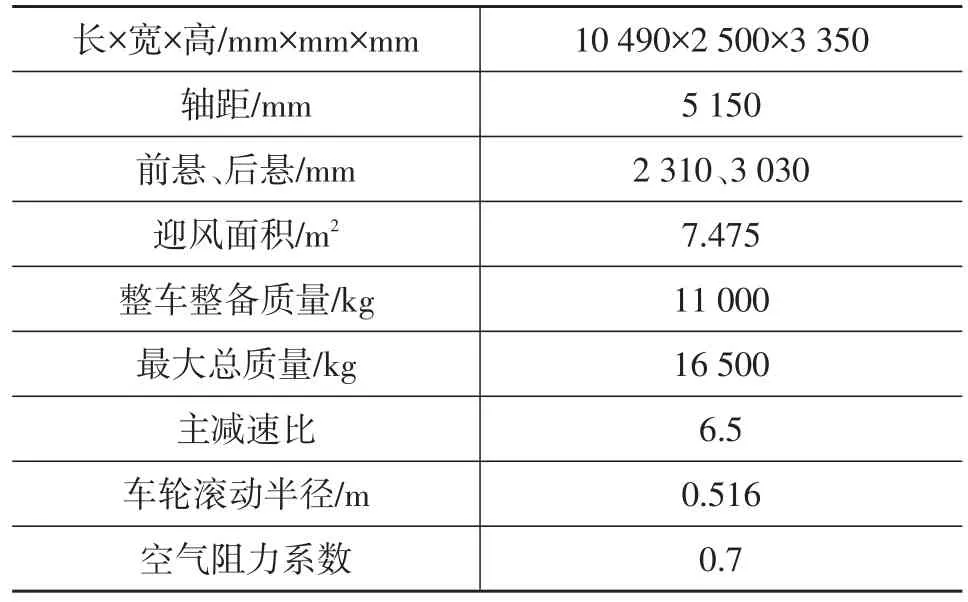
表1 某天然氣混合動力公交車基本參數
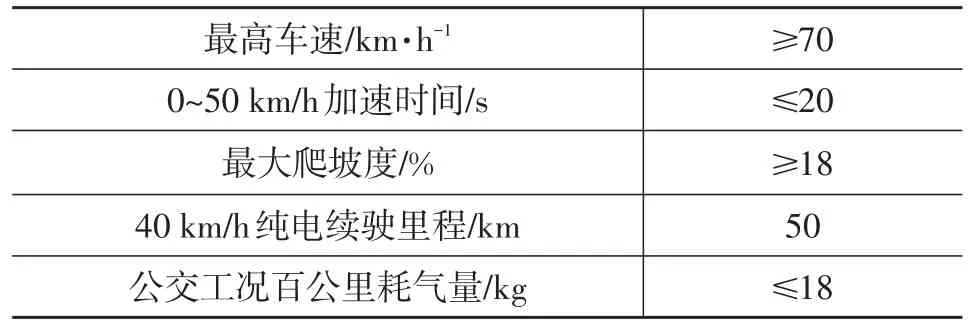
表2 動力性及經濟性要求
為滿足公交車的動力經濟性要求,首先需要進行動力部件的參數匹配及選型,最終的匹配結果如表3所列。需要說明的是,與傳統混合動力系統中電池只起輔助作用不同,增程式電動車一般有一定的純電續駛里程要求[12],因此匹配的動力電池組的總儲存能量較大。

表3 主要動力部件及參數
2.2 建立車輛仿真模型
在確定車輛參數和動力系統主要部件后,基于AVL Cruise平臺建立天然氣混合動力公交車仿真模型。Cruise是奧地利AVL公司研發的一款正向仿真軟件,主要用于開發階段對車輛的動力經濟性、排放性能和制動性能進行仿真分析。利用已有的模塊箱進行車輛建模,并建立模塊之間的信號連接、機械連接、電子連接和排放連接,最終建立整車仿真模型如圖1所示。模型包括輪胎、制動器、電氣系統、電動機、發電機、動力電池組、發動機、傳動系、差速器及其電氣系統共17個機械模塊,防滑控制、制動控制、電動機控制、增程器控制、PID控制共5個控制模塊,另外還有駕駛艙、監視器及一個常量存儲模塊。其中電氣系統模塊用于模擬公交車行駛時空調、風扇等附件消耗功率,電動機控制及增程器控制為主要的能量分配控制模塊。
3 能量管理策略
3.1 全電力集中控制
全電力集中控制策略是插電式混合動力汽車(Plug-in Hybrid Electric Vehicle,PHEV)上常見的能量管理策略,本文以此策略作為后續仿真過程所采用策略的比較基準,其控制策略如圖2所示[13]。由圖2可看出,在車輛行駛的初始階段,電池電量充足,采用純電驅動,當電池SOC下降到預設的下限閾值時,APU起動提供車輛行駛所需的平均驅動功率,并保持電池電量在一定范圍內。
在圖1仿真模型中,車輛的APU由“增程器控制”模塊控制,APU基本控制流程如圖3所示。
圖3中,Operating Mode為增程器起動信號,1代表起動,0代表關閉;Start Switch為發電機起動開關,1代表起動,0代表關閉;Start Switch為駕駛者輸入的油門踏板信號,1代表踩下踏板,0代表踏板回位;Load Signal為發動機負荷信號,0代表不起動,0.5代表半負荷狀態;PID Load Signal來自“PID控制”模塊的中間控制變量,該模塊對當前發動機實際轉速與預設轉速做比較,并通過PID算法輸出PID Load Signal信號給車輛的APU控制模塊。本次仿真中,暫將預定轉速值設為1 600 r/min,將全電力集中策略中的SOC下限閾值設為30%,為滿足車輛在電荷維持模式下行駛時SOC維持在30%附近,將APU流程中的上限閾值(即SOCmax)設為30.5%,下限閾值(即SOCmin)設為29.5%。
3.2 基于SOC的發動機預設轉速控制
在全電力集中策略中,綜合考慮發動機的效率、NVH和常用轉速等因素,將發動機的預設轉速定為1 600 r/min。但發動機預設轉速固定會使動力系統跟隨工況變化的能力下降,導致氣耗量上升等情況,因此在全電力集中控制策略基礎上,將發動機預設轉速與車載電池的SOC關聯起來,如表4所列,即當SOC值低于下限閾值而又相對較高時降低發動機轉速;當SOC值很低時提高發動機轉速。為實現該控制策略,在整車仿真模型中增加“SOC-轉速”控制模塊,向PID控制模塊輸入實時預設轉速。
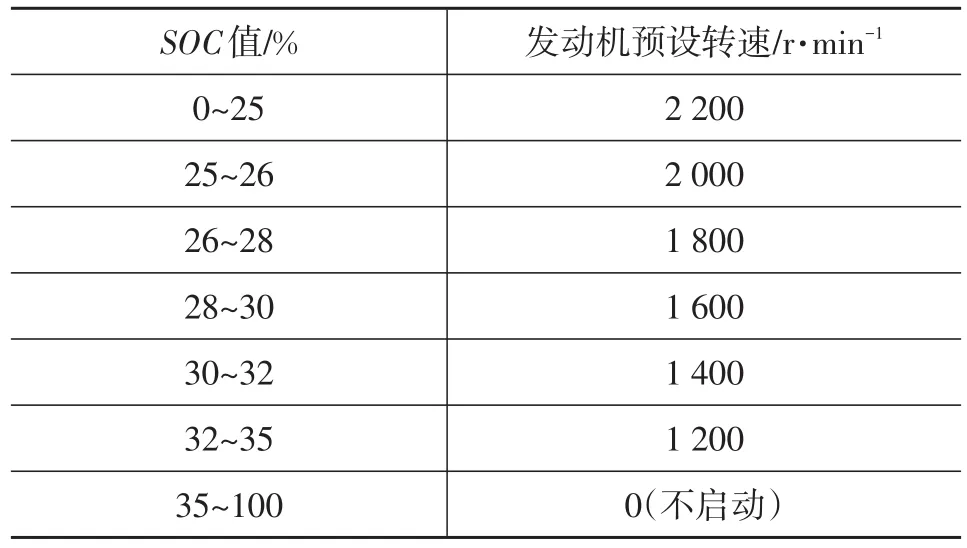
表4SOC值與發動機預設轉速對應關系
3.3 基于SOC和車速的發動機預設轉速控制
由于以電池SOC單變量控制發動機預設轉速時,沒有考慮車輛加速過程中的瞬時功率需求,因此將預設轉速與電池SOC和車速同時關聯起來,如圖4所示。當電池SOC較高(高于35%)時,APU不起動;當SOC達到下限閾值后,APU起動,且發動機預設轉速隨車速改變。當車速較低時,對應發動機轉速也較低,隨著車速的提高,預設轉速線性提高到某一固定值不變,直至SOC值高于起動APU時的下限閾值,増程器關閉。發動機預設轉速固定值由車載電池SOC決定,SOC值越低,發動機預設轉速越高。為實現該控制策略,在整車模型基礎上增加“SOC-車速-轉速”控制模塊,以向PID模塊輸入發動機預設轉速。
需要說明的是,由于該混合動力公交車的動力電池容量較大,根據仿真和實際樣車在公交線路的路試經驗,其SOC的波動非常緩慢,因此在短時間內發動機的預設目標轉速主要與車速有關。由于公交車行駛時速度變化平緩且均勻,因此發動機預設轉速只會在車輛起動階段隨車速增加而緩慢增大,而當公交車車速達到20~30 km/h以上時,發動機轉速基本穩定在設定的平臺上平穩運轉。通常公交車車速一般都是平緩加減速,發動機的目標轉速也會隨之平緩增加或降低,因此在基于SOC和車速控制策略下,預設轉速不會出現頻繁波動,這一方面會提高整車的經濟性,同時也使得車輛的NVH特性得到改善。
4 仿真結果及分析
在仿真平臺上分別運行全電力集中控制策略車輛模型、基于SOC的控制策略車輛模型和基于SOC及車速的控制策略車輛模型,結果顯示,3種模型均能滿足車輛的動力性及經濟性要求。由于能量管理策略優化主要針對APU起動之后的混合動力驅動階段,因此主要分析該階段的循環百公里氣消耗量及全工況能耗,工況選擇具有代表性的中國典型城市公交循環工況(下稱典型工況)。
4.1 百公里氣耗量
設置車載電池SOC初值為30.0%。考慮到按照單循環工況折算可能產生較大的隨機誤差,所以使車輛連續運行10個典型工況并按里程折算后,得到采用3種策略的車輛在不同載荷下混合動力驅動階段的百公里氣耗量,結果如表5所列。與全電力集中策略相比,在基于SOC的發動機預設轉速控制策略下,車輛在空載、半載、滿載下的百公里氣耗量分別下降了2.1%、7.4%和6.5%,燃料經濟性得到一定改善。
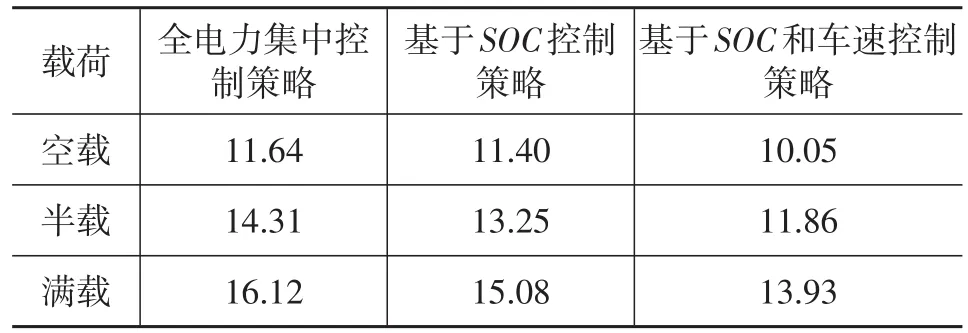
表5 百公里氣耗量仿真結果 kg/100 km
氣耗量下降的原因是,基于SOC的轉速調整使得車輛在電池SOC較高時發動機工作在較低轉速點,對應發動機外特性曲線上的最大功率較小,由于車輛行駛所需的驅動功率不變,根據負荷率的定義(發動機在某一轉速下發出的有效功率與相同轉速下所能發出的最大有效功率的比值)可知,發動機的負荷率提高,發動機的燃料經濟性更好(高負荷率下泵氣損失少,且傳熱損失小)。另外,當電池SOC低于35%,但仍處于較高范圍內(如高于28%)時,發動機在預設的較低轉速點工作,機械效率提高,在相同功率需求下燃料經濟性提高。
在將發動機預設轉速與SOC和車速同時關聯后,與只關聯電池SOC相比,車輛在3種負荷下的循環百公里氣耗量又分別下降了11.8%、10.5%和7.6%。可見,相比于發動機預設轉速只關聯SOC,同時關聯車速和SOC的控制策略能夠明顯改善燃料經濟性,這是因為,在只關聯SOC的控制策略下,當APU的轉速只設置在很小的范圍內時,為了滿足發電機能夠發出最大功率的需求,需要將發動機設定在較高轉速,這樣當公交車低速運行而動力電池SOC又偏高時,發電機的發電功率會很小,導致發動機在該轉速下的負荷率太低,整車燃料經濟性變差;另一方面,當公交車低速運行時,偏高的發動機轉速又會產生過大的噪聲和振動,也不利于舒適性改善。而在基于SOC和車速的控制策略下,不僅考慮了電池SOC值較高時需要的APU功率較小,同時考慮了循環工況內車速較低時APU需求功率較小,故在低速階段發動機預設轉速隨車速線性增加,一方面保證了小功率需求時發動機有較高的負荷率;另一方面又降低了小功率需求階段的發動機轉速,從而進一步提高了發動機的工作效率。預設轉速隨電池SOC變化范圍不同階梯設置,即SOC值越低,對應的APU起動車速越低,保證了低SOC下APU的充電功率。
4.2 全工況綜合能耗
增程式公交車在實際運行時,一般是從動力電池滿電狀態以純電驅動狀態過渡到混合動力驅動狀態,也就是先進入CD運行模式,然后進入CS運行模式(下稱全工況模式)。以車輛半載為例,全工況仿真時,使車輛連續運行20個典型循環工況,累計行駛里程為118.2 km,在全電力集中控制策略下電池參數變化如圖5所示,另外兩種控制策略下的變化曲線與此類似。
仿真時電池SOC初始值設為100.0%,在得到20個典型循環工況內的電池電量消耗和天然氣消耗量后,將電耗折算為等效氣耗量[14,15],從而得到20個典型循環工況下的折算百公里總氣耗量,結果如表6所列。
圖6~圖8分別為全電力集中控制策略、基于SOC控制策略、基于SOC和車速控制策略下,發動機功率隨時間的變化曲線。從圖中可看出,3種控制策略下發動機的輸出功率大部分時間在10~30 kW范圍內波動。對比圖6、圖7和圖8可看出,在全電力集中控制策略下,發動機的輸出功率不穩定,這是由于發動機預設轉速較高,其預設轉速下的峰值功率也較高,實際輸出功率波動較大,這種發動機工作的不穩定使得其燃料經濟性變差。相比之下,在基于SOC和車速的控制策略下,發動機的工作狀態最穩定,波動幅度最小。負荷率與發動機的波動共同決定了在基于SOC和車速的控制策略下全工況折算總氣耗量最低。
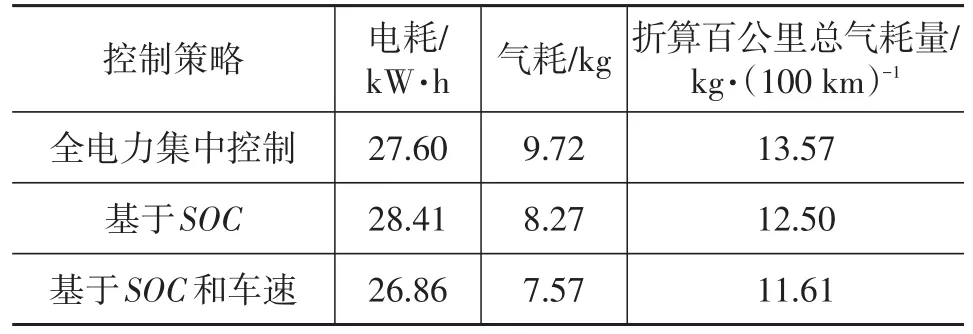
表6 全工況電耗與氣耗
圖9為增程器模塊中天然氣發動機的萬有特性曲線,由圖9可看出,在功率為10~30 kW范圍內,隨發動機轉速的降低,有效燃料消耗率向更經濟區域移動,而圖6~圖8也表明在3種控制策略下,發動機輸出功率的波動范圍基本在該范圍內。這也解釋了采用基于SOC及基于SOC和車速的控制策略后,發動機平均轉速降低,且折算百公里氣耗量隨之下降的原因。
5 結束語
基于AVL Cruise建立了某款天然氣增程式混合動力公交車的動力性和經濟性仿真模型,并在中國典型城市公交循環工況下進行了性能仿真。以全電力集中控制策略作為比較基準,設計了只基于電池SOC及基于電池SOC和車速的兩種發動機預設轉速控制策略,仿真結果表明,整車各項動力經濟性指標均達到設計要求。此外,研究發現,綜合考慮電池SOC和車速等因素來預設發動機轉速的控制策略能夠有效改善發動機在低功率需求下的負荷率,并減少發動機的功率波動,從而能夠顯著提高整車的燃料經濟性。
1 Song B,Shin J,Lee S,et al.Design of a high power transfer pickup for on-line electric vehicle(OLEV)//Electric Vehicle Conference(IEVC),2012 IEEE International.IEEE,2012:1~4.
2 Wirasingha S G,Emadi A.Classification and review of control strategies for plug-in hybrid electric vehicles.vehicular Technology,IEEE Transactions on,2011,60(1):111~122.
3 Schacht E J,Bezaire B,Cooley B,et al.Addressing drivability in an extended range electric vehicle running an equivalent consumption minimization strategy(ECMS).SAE Technical Paper,2011.
4 朱武喜,孫立清.增程式電動公交客車控制策略研究.汽車技術,2013(4):1~5.
5 許世景.串聯混合動力汽車能量管理策略優化研究:[學位論文].天津:天津大學,2013.
6 Skugor B,Deur J.Instantaneous optimization-based energy management control strategy for extended range electric vehicle.SAE Technical Paper,2013.
7 Tingting D,Fuquan Z,Jun L,et al.Design method and control optimization of an extended range electric vehicle// Vehicle Power and Propulsion Conference(VPPC),2011IEEE.IEEE,2011:1~6.
8 洪先建,宋珂,章桐.增程式電動汽車模糊控制能量管理策略研究.佳木斯大學學報:自然科學版,2013,31(2):174~178.
9 張炳力,張平平,趙韓,等.基于離散動態規劃的PHEV燃油經濟性全局最優控制.汽車工程,2010,32(11).
10 Walsh P M,King J,Gantt L R,et al.An extended-range electric vehicle control strategy for reducing petroleum energy use and well-to-wheel greenhouse gas emissions.SAE Technical Paper,2011.
11 申彩英.串聯混合動力汽車能量優化管理策略研究:[學位論文].天津:天津大學,2010.
12 Miller M A,Holmes A G,Conlon B M,et al.The GM“Voltec”4ET50 multi-mode electric transaxle.SAE Technical Paper,2011.
13 Gonder J,Markel T.Energy Management Strategies for Plug-In Hybrid Electric Vehicles.National Renewable Energy Laboratory(NREL),Golden,CO.,2007.
14 GB/T 2589—2008綜合能耗計算通則.
15 寧艷紅,郭興,劉云崗.基于運行工況的純電動車與汽油車能耗排放比較分析.內燃機與動力裝置,2012(3):5~7.
(責任編輯 文 楫)
修改稿收到日期為2017年3月9日。
A Study on Simulation of Energy Management Strategy of Extended Range Hybrid Bus Based on Cruise
Yang Sen1,Qiu Bin2,Ta La2,Li Liguang1
(1.Tongji University,Shanghai,201804;2.State Key Laboratory of Automotive Safety and Energy,Tsinghua University, Beijing 100084)
Based on all-electric-range-focused strategy,the default speed control strategy based on batterySOCand default speed control strategy based on combination of batterySOCand vehicle speed are developed,then the vehicle simulation model with corresponding control algorithm modules is built with AVL Cruise software.The above model is simulated under China typical city bus drive cycle.The simulation results show that the developed control strategies can effectively improve the CNG consumption rate during the Charge Sustaining(CS)phase and also the comprehensive energy consumption during both Charge Depleting(CD)and CS phase.
Extended range hybrid bus,Energy management strategy,Gas consumption, Simulation
增程式混合動力汽車 能量管理策略 氣耗量 仿真
U462.1
A
1000-3703(2017)07-0037-06
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2020年6期)2021-01-26 00:55:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
汽車與新動力(2015年1期)2015-02-27 12:11:01
