二次監(jiān)視雷達(dá)目標(biāo)點跡分裂分析與凝聚方法
2017-08-02 09:10:57四川九洲空管科技有限責(zé)任公司
電子世界 2017年14期
四川九洲空管科技有限責(zé)任公司 何 川 李 璐
二次監(jiān)視雷達(dá)目標(biāo)點跡分裂分析與凝聚方法
四川九洲空管科技有限責(zé)任公司 何 川 李 璐
二次監(jiān)視雷達(dá)點跡凝聚是二次監(jiān)視雷達(dá)信號處理的重要組成部分,合適的點跡凝聚方法,能有效的提高目標(biāo)距離、方位探測精度。但是在復(fù)雜的情況影響下,會產(chǎn)生目標(biāo)分裂狀況,對后續(xù)的航跡處理跟蹤的準(zhǔn)確性產(chǎn)生直接影響,對二次監(jiān)視雷達(dá)的探測效果產(chǎn)生較大的影響,不利于監(jiān)視人員掌握空勤狀況。因此本文將分析二次雷達(dá)點跡分裂的原因及解決該問題的方法。
二次監(jiān)視雷達(dá);點跡分裂;點跡凝聚
1.引言
在空中交通管制系統(tǒng)中,單脈沖航管二次監(jiān)視雷達(dá)可提供合作目標(biāo)的方位、距離、高度和識別屬性等新息。由于探測距離遠(yuǎn)、測量精度高、獲取信息多等優(yōu)點,航管二次雷達(dá)成為空中交通管制重要的感知系統(tǒng)和決策依據(jù)。然而,隨著航空運(yùn)輸業(yè)的飛速發(fā)展,飛行密度日益增加,給航管二次雷達(dá)測量質(zhì)量提出了更高的要求[1]。更加復(fù)雜的電磁環(huán)境也給航管二次雷達(dá)的信號及數(shù)據(jù)處理帶來的新的挑戰(zhàn)。
在單脈沖二次監(jiān)視雷達(dá)設(shè)備中,點跡提起器(Plot Extractor)是各種類、各廠商航管二次雷達(dá)不可缺少的組成部分,它的主要功能是:凝聚目標(biāo)的距離、方位,計算目標(biāo)的識別代碼(M3/A、MC、MS代碼)等信息。點跡凝聚的處理精度及能力是二次監(jiān)視雷達(dá)系統(tǒng)的一項重要技術(shù)指標(biāo)。圖1給出了一般情況下,工程應(yīng)用中的點跡凝聚處理的框圖。
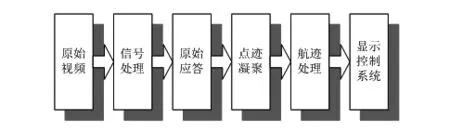
圖1 二 次雷達(dá)點跡處理框圖
常用的點跡凝聚方法在復(fù)雜的地形及各種干擾影響下,會產(chǎn)生目標(biāo)分裂情況,對二次雷達(dá)的效果產(chǎn)生極大的影響。本文介紹的點跡凝聚的基本概念,并且通過對目標(biāo)分裂現(xiàn)象的分析, 提出一種適合二次監(jiān)視雷達(dá)的點跡凝聚方法,以抑制目標(biāo)分裂現(xiàn)象的發(fā)生, 提高雷達(dá)跟蹤目標(biāo)的準(zhǔn)確性[2]。
2.點跡分裂分析
2.1 點跡分裂的定義
所謂目標(biāo)分裂是指雷達(dá)對同一目標(biāo)的一次掃掠過程中,目標(biāo)機(jī)的應(yīng)答信號經(jīng)信號處理后表現(xiàn)為兩個或兩個以上目標(biāo)的現(xiàn)象,也就是說二次雷達(dá)把同一個目標(biāo)判成幾個目標(biāo)。目標(biāo)分裂又可分為方位上分裂和距離上分裂兩種。方位分裂是指某一目標(biāo)在同一距離, 不同方位上被判為多個目標(biāo); 距離分裂是指某一目標(biāo)在同一方位, 不同距離上被判為多個目標(biāo)。目標(biāo)的分裂可只在距離或方位上出現(xiàn), 也可同時在方位和距離上出現(xiàn)[2-3]。
2.2 距離分裂的原因分析
二次雷達(dá)原始應(yīng)答信號在進(jìn)行點跡凝聚之前,需要進(jìn)行框架檢測、脈沖前沿后沿檢測、6dB檢測,用于提取目標(biāo)的量化幅度及量化距離。ICAO附件10中的應(yīng)答器標(biāo)準(zhǔn)定義了應(yīng)答脈沖的前沿時間位置,其定義為應(yīng)答器應(yīng)答調(diào)制信號前沿的半壓點對應(yīng)的時間。ICAO附件10所允許的應(yīng)答機(jī)應(yīng)答脈沖持續(xù)時間在0.35-0.55us范圍內(nèi),任何持續(xù)時間超過最大的0.55us的脈沖都可能是2個脈沖。所以當(dāng)兩個應(yīng)答脈沖發(fā)生疊加時,脈沖寬度就會大于0.55us,脈沖應(yīng)答信號真實的前沿(ALE)被檢測出來,根據(jù)二次雷達(dá)信號處理的脈沖后沿反推檢測規(guī)則,會出現(xiàn)偽前沿(PLE)也被檢測出來[4-5]。
在設(shè)備連續(xù)波干擾、多路徑反射、異步應(yīng)答干擾、遠(yuǎn)距離信號幅度迅速衰落等情況時,甚至在某些時候會出現(xiàn)3個或以上應(yīng)答前沿的情況,那么在臨近的距離單元會出現(xiàn)大量的虛假應(yīng)答。
由于現(xiàn)代二次雷達(dá)的測距精度及分辨力指標(biāo)要求是相對很高一般是約幾十米,甚至更低,大多數(shù)的凝聚處理使用的距離凝聚窗都很小,因此由于距離因素引起的點跡分裂更易產(chǎn)生。距離上目標(biāo)分裂示意圖如圖5所示。
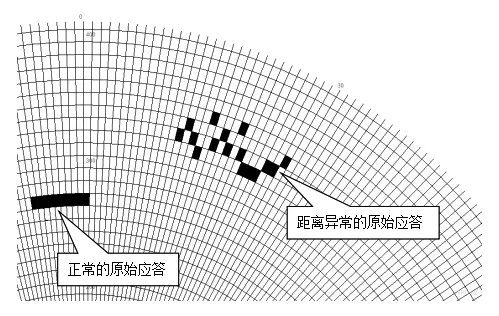
圖2 距離目標(biāo)分裂示意圖
2.3 方位分裂原因分析
在2.1章節(jié)中已經(jīng)說明了,安裝機(jī)械式天線的二次監(jiān)視雷達(dá)工作時,天線連續(xù)旋轉(zhuǎn)對周圍空域進(jìn)行掃描時,能夠在方位上獲取同一目標(biāo)掃描的N個應(yīng)答信號, 這些回波經(jīng)信號處理后形成目標(biāo)原始點跡,攜帶目標(biāo)的方位、距離、識別代碼、信號幅度等信息[2]。如果同一個目標(biāo)在方位上的應(yīng)答因為某些原因間斷性或者連續(xù)性丟失,一旦丟失程度達(dá)到目標(biāo)結(jié)束原則時,就會造成目標(biāo)在方位上的分裂。
下面是幾個情況是造成目標(biāo)丟失的可能原因:
a)詢問應(yīng)答信號之間的傳播路徑上的地物遮擋;
b)應(yīng)答機(jī)應(yīng)答率限制;
c)機(jī)載設(shè)備的相互抑制;
d)上下天線切換的限制;
e)異步干擾(FRUIT);
f)應(yīng)答脈沖信號的重疊;
方位目標(biāo)分裂示意圖如圖3所示。
圖3 方位目標(biāo)分裂示意圖
在大多數(shù)情況下,點跡分裂是有距離和方位上的綜合因素造成的。如圖4所示。
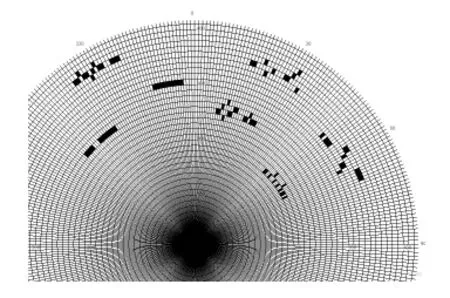
圖4 常見的目標(biāo)分裂情況
3.深度強(qiáng)相關(guān)和點跡間相關(guān)方法解決點跡分裂問題
在常規(guī)的點跡凝聚方法的基礎(chǔ)上,新增加了深度強(qiáng)相關(guān)和點跡間相關(guān)的方法,既保證了目標(biāo)的分辨能力,也一定程度上處理了二次雷達(dá)點跡分裂的問題。方法基本流程圖如圖5所示。
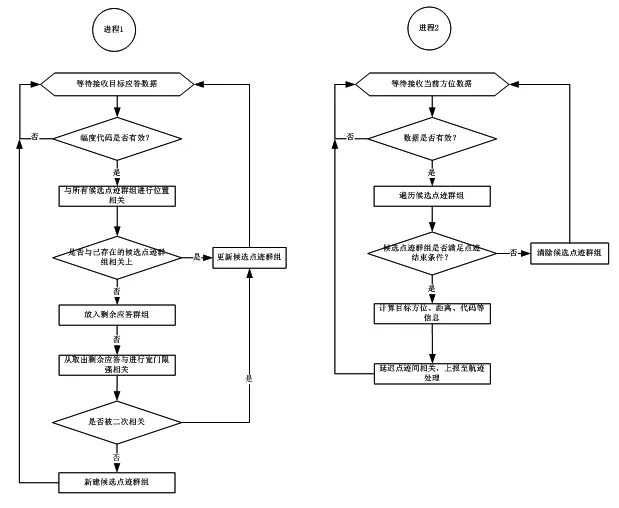
圖5 點跡凝聚方法的基本流程圖
3.1 小門限凝聚(窄門限寬準(zhǔn)則凝聚)
常規(guī)的方法采用距離和方位分別一次凝聚的方法,而該方法距離方位同時凝聚。并且由于該二次雷達(dá)采用單脈沖測角體制,測角的精度要求高,在兼并考慮分辨力的前提下,采用小距離-方位窗進(jìn)行相關(guān)。
當(dāng)點跡凝聚收到攜帶距離、方位、和差幅度值、相位、代碼信息的應(yīng)答信號后,如果該應(yīng)答是首次應(yīng)答,則創(chuàng)建一個候選點跡群組(candidate plot group),等待后續(xù)應(yīng)答信號與之相關(guān)。如果該點不是首次應(yīng)答則和所有已經(jīng)存在的候選點跡群組進(jìn)行距離方位相關(guān)。相關(guān)時以候選點跡群組中上一次應(yīng)答的方位(PreA)和距離(PreR)為中心,以RG{rmin,rmax}、AG{amin,amax}為相關(guān)窗進(jìn)行位置相關(guān),相關(guān)窗計算公式為:
rmin= PreR - RStep
rmax= PreR + RStep
amin= PreA - AStep
amin= PreA + AStep
其中RStep為距離分辨力指標(biāo)要求、AStep為距離分辨力指標(biāo)要求,如AStep=0.6度、RStep=50米。小相關(guān)窗示意圖如圖6所示。
與該點跡候選群組能夠相關(guān)上的應(yīng)答,均將信息保存入該候選點跡群組。按照應(yīng)答數(shù)據(jù)的接收順序?qū)⒛繕?biāo)應(yīng)答依次相關(guān),直到滿足相關(guān)結(jié)束準(zhǔn)則,獲得候選點跡群組。同時所有未被相關(guān)的原始應(yīng)答均被存入剩余應(yīng)答組(remainder reply group),進(jìn)入深度強(qiáng)凝聚。
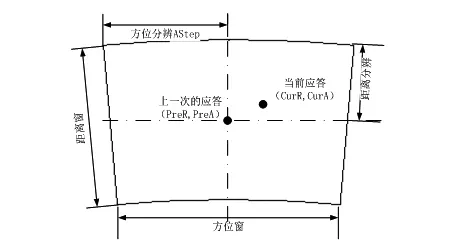
圖6 小相關(guān)窗示意圖
3.2 深度強(qiáng)凝聚(寬門限嚴(yán)準(zhǔn)則凝聚)
經(jīng)過小門限凝聚,雖然被凝聚的原始應(yīng)答相對可靠,但是有可能漏掉一定的應(yīng)答數(shù)據(jù),漏掉的應(yīng)答數(shù)據(jù),重新形成候選點跡群組,容易形成點跡分裂現(xiàn)象,因此我們根據(jù)二次雷達(dá)應(yīng)答信號的特點使用深度強(qiáng)凝聚,進(jìn)行補(bǔ)充凝聚。
在上面的步驟中已經(jīng)得到了基本的候選應(yīng)答群組,現(xiàn)在將沒有相關(guān)上的應(yīng)答從剩余原始應(yīng)答群組依次提取出來,與所有候選點跡群組進(jìn)行一個寬大窗的相關(guān)處理,RGS{rmin,rmax}、AGS{amin,amax},RGS是可能出現(xiàn)的最大距離偏移值,AGS是可能出現(xiàn)的最大方位偏移值。在本次相關(guān)中,凡是被相關(guān)上的原始應(yīng)答,必須經(jīng)過代碼判斷,如果剩余應(yīng)答的識別代碼(如M3/A、MS地址等)與點跡組的應(yīng)答識別代碼相同,則將其重新加入候選點跡群組中。如果是高度應(yīng)答,相同的高度碼的剩余應(yīng)答也加入群組,根據(jù)高度應(yīng)答碼的變化規(guī)律,如果剩余高度碼與候選點跡的高度碼相差1個碼位的應(yīng)答,也加入點跡組群組。
該方法找回了有效的原始應(yīng)答,并且減少了剩余應(yīng)答的個數(shù),從而的降低剩余應(yīng)答形成新的候選點跡群組的幾率。深度強(qiáng)凝聚示意圖如圖7所示。
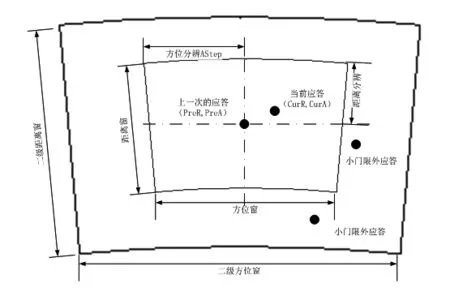
圖7 深度相關(guān)示意圖
3.3 融合提取點跡
獲取了最終確認(rèn)的候選點跡群組使用統(tǒng)計學(xué)的方法擬合出當(dāng)前目標(biāo)的精確坐標(biāo)位置以及其他的信息,完成凝聚,提取出點跡。依據(jù)經(jīng)驗和實際情況,本文分別對各距離方位采取了不同的辦法進(jìn)行計算。
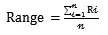
a)計算距離(Range)
二次雷達(dá)的脈沖采樣時鐘一般較高,所以二次雷達(dá)系統(tǒng)測量的距離一般精度較高,所以直接采用“均值法”求得:
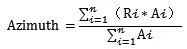
b)計算方位(Azimuth)
信號幅度越大的位置越接近目標(biāo)的真實方位,所以采用“質(zhì)心法”,結(jié)合信號幅度信息進(jìn)行計算:
c)獲取高度及其他參數(shù)
二次雷達(dá)探測的高度信息,是應(yīng)答信號的攜帶的高度編碼數(shù)據(jù),因此按照高度編碼規(guī)則將高度數(shù)值進(jìn)行解析,即可獲取目標(biāo)準(zhǔn)確的海拔高度數(shù)據(jù)。
同時為了后續(xù)航跡融合處理能夠有更好的效果,可以將波束寬度、目標(biāo)幅度、有效應(yīng)答次數(shù),等信息進(jìn)行附帶統(tǒng)計,形成點跡數(shù)據(jù)準(zhǔn)備送給航跡處理。
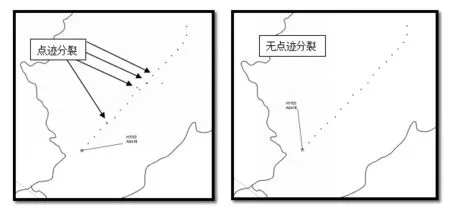
圖8 方法應(yīng)用前(左圖)與應(yīng)用后(右圖)效果對比
3.4 點跡間相關(guān)
通過以上處理后,點跡分裂的情況大為改善,但是在某些特定的電磁環(huán)境極其惡劣的場合仍然可能出現(xiàn)個別分裂點跡,在進(jìn)行大量的數(shù)據(jù)分析以后,發(fā)現(xiàn)對于同一個目標(biāo)分裂出的多個點跡,滿足點跡結(jié)束條件的時間很接近,因此點跡間相關(guān)的方法,做進(jìn)一步的凝聚。
在所有點跡被上報給數(shù)據(jù)處理進(jìn)行后續(xù)的航跡跟蹤之前,延時一定的時間,一般為3~5個觸發(fā)周期。在所有點跡群組中進(jìn)行點跡間位置相關(guān),如果發(fā)現(xiàn)位置靠近且代碼相同,高度相當(dāng)?shù)狞c跡,立即進(jìn)行幅度、距離比較,按照距離近優(yōu)先、幅度高優(yōu)先的原則,進(jìn)行合并或剔除處理,最終僅保留一個最終點跡上報數(shù)據(jù)處理。
4.試驗對比
該方法在某型地面二次監(jiān)視雷達(dá)設(shè)備中進(jìn)行了驗證試驗。將出現(xiàn)分裂的原始應(yīng)答進(jìn)行回放,驗證點跡凝聚性能。點跡凝聚方法使用前和使用后的效果對比如圖8所示。點跡凝聚方法對點跡分裂有較好的抑制。
5.結(jié)束語
目標(biāo)分裂造成二次雷達(dá)探測的點跡數(shù)量增加,影響二次雷達(dá)的點跡效果。同時分裂的點跡也加大了航跡相關(guān)處理的工作量,容易造成航跡處理過載,影響后續(xù)目標(biāo)的正確處理, 以及二次雷達(dá)航跡對目標(biāo)的跟蹤質(zhì)量,從而影響整個二次監(jiān)視雷達(dá)的性能。針對二次監(jiān)視雷達(dá)的點跡凝聚方法和點跡分裂原因,不少文件均未提到,本文介紹了二次監(jiān)視雷達(dá)點跡凝聚方法,分析了出現(xiàn)點跡分裂的原因,并且提出了一種實際可行的凝聚準(zhǔn)則和方法,包括小門限凝聚、深度強(qiáng)凝聚方法及點跡間相關(guān)方法等。理論上,該方法合理可行。在實際應(yīng)用中,文中的方法已成功運(yùn)用于多型號的二次監(jiān)視雷達(dá)系統(tǒng)中,并取得了較好的效果。
[1]崔海歐,方詠秋.某航管二次雷達(dá)受擾問題定位及分析[J].科協(xié)論壇,2013.
[2]劉樹峰.雷達(dá)目標(biāo)點跡分裂與改進(jìn)的點跡提取器設(shè)計[J].電子技術(shù),2010年第23卷第Z1期.
[3]賀士廉.克服小滑窗檢測中目標(biāo)分裂的方法[J].雷達(dá)與對抗,1995(4):156-159.
[4]Michael C.Stevens.Sencondary Surveillance Radar[M].boston and london:Artech House,1998.
[5]張慰,徐炎祥.二次雷達(dá)遠(yuǎn)離[M].北京:國防工業(yè)出版社,2007.11
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國共青團(tuán)(2015年7期)2015-12-17 01:24:38
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56