SMA-電機復合驅動仿生肘關節的控制策略與仿真
2017-08-01 00:00:55羅天洪李會蘭李喬易
重慶交通大學學報(自然科學版) 2017年7期
關鍵詞:記憶合金
羅天洪,郭 園,梁 爽,李會蘭,李喬易
(重慶交通大學 機電與車輛工程學院,重慶 400074)
?
SMA-電機復合驅動仿生肘關節的控制策略與仿真
羅天洪,郭 園,梁 爽,李會蘭,李喬易
(重慶交通大學 機電與車輛工程學院,重慶 400074)
針對SMA-電機復合驅動仿生肘關節控制非線性、時變、溫度滯后等特點,提出了一種雙輸入-四輸出的模糊控制算法,建立模糊PID自適應控制模型,求解復合驅動仿生肘關節在階躍響應及理論軌跡下的動作狀態,得到了仿生肘關節旋轉和俯仰運動的位姿、角速度跟蹤圖譜。實驗證明:設計的雙輸入-四輸出的模糊PID自適應控制算法具有超調量小、系統魯棒性高、響應速度快的特點,可以實現SMA-電機復合驅動仿生肘關節的精準位姿控制。
機電工程;復合驅動;仿生肘關節;模糊PID自適應控制
0 引 言
隨著新型材料的興起與發展,壓電陶瓷、磁致伸縮材料和氣動肌肉等[1-3]廣泛應用于機器人領域。其中,形狀記憶合金材料(SMA)以高功率質量比、驅動器機構簡單、良好的柔順仿生性能及驅動功率低等優良特性應用于各種類型的仿生機器人中[4-5]。李健等[6]研制的形狀記憶合金絲驅動的仿生水母,具有結構簡單、機動性強等特點,胡冰山等[7]研制的形狀記憶合金驅動的仿生吸盤,具有功率質量比大、輕型化等優勢。
但形狀記憶合金在加熱形變對外做功時,會產生一定的時滯非線性,傳統的數學模型難以準確描述,造成較大的控制誤差。李揚等[8]設計了一種SMA驅動變體機翼后緣的普通PID控制,實現了形狀記憶合金良好控制,但存在響應時間長、超調量大等問題;付宜利等[9]設計了一種基于模糊控制的兩自由度導管機器人;王宏等[10]設計了一種模糊控制的SMA驅動關節,可以有效降低形狀記憶合金驅動器的超調量,但還存在一定的控制誤差。
基于以上研究,我們設計了一種雙輸入-四輸出的模糊PID自適應控制方式,用于控制SMA-電機復合驅動仿生肘關節。先使用模糊控制器將SMA的時滯非線性轉變為線性問題,動態控制SMA溫度形變量和PID調控參數,再采用PID控制模式,控制電機的輸出轉角,精準控制整個關節的位姿。這種控制方法大大提升復合關節的控制精度,降低了響應時間,提高了系統魯棒性。
1 SMA-電機復合驅動關節的工作原理
文中的復合驅動仿生肘關節采用SMA與交流伺服電機復合驅動,如圖1。當通電加熱時SMA絲發生形變產生較大的拉力,具有拉動中間塊移動的趨勢;由于中間塊相連接的絲杠2上的制動器處于鎖定狀態,絲杠2無法轉動,同時中間塊也無法實現移動;當控制電路給制動裝置和交流伺服電機驅動信號時,交流伺服電機通過齒輪組驅動絲杠2轉動,同時制動裝置解除鎖定釋放中間塊發生移動,SMA的拉力通過中間塊驅動絲杠1發生轉動;絲杠1通過錐齒輪和離合器實現仿生肘關節的俯仰和旋轉運動。
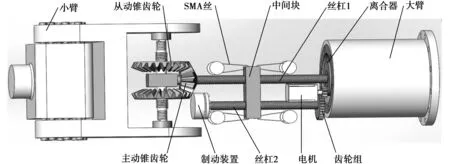
圖1 SMA-電機復合驅動仿生肘關節結構Fig. 1 Structure of bionic elbow joint compoundly driven by SMA-motor
在復合驅動過程中,SMA絲作為主驅動,用于產生驅動關節運動的大力矩,實現關節的大負載作業;交流伺服電機與制動裝置配合實現關節的精準的位置控制。
2 仿生肘關節的動力學方程
如圖2,建立復合驅動關節的連桿坐標系,其中O0-X0Y0Z0與關節大臂的質心重合,O1-X1Y1Z1與肘關節的質心重合,O2-X2Y2Z2與小臂的質心重合;肘關節的質量為m1,小臂的質量為m2,小臂的質心到大臂質心的距離為l2,大臂旋轉運動轉動的角度為θ1,小臂俯仰運動轉動的角度為θ2、J1和J2分別為肘關節、小臂的轉動慣量。
在文中的仿生肘關節中,將大臂端視為固定端,肘關節和小臂為運動部件,運動部件的動能Eki包括運動部件質心線速度引起的動能和運動部件角速度產生的動能之和,即:
(1)
系統的總動能為兩個運動部件的動能之和,即
(2)

(3)
系統的拉格朗日動力學方程為

(4)
式中τ是肘關節旋轉運動和小臂的俯仰運動的驅動力矩矢量。
肘關節和小臂的慣量矩陣為
(5)
可以求出肘關節和小臂的動能分別為
(6)
(7)
Jp=J2z+m2(l2sinθ2)2
(8)
系統的總動能為

(9)
分別對肘關節和小臂關節速度和關節變量求偏導為
(10)
(11)
筆者研究對象為肘關節,不是一個完整的機器人,因此不考慮勢能因素,根據拉格朗日動力學方程[11-12],將式(10)、式(11)帶入式(4)得到仿生肘關節的動力學模型:
(12)
將式(12)寫成矩陣形式為

(13)
(14)
(15)
3 仿生肘關節模糊PID控制方法
仿生肘關節采用記憶合金絲與交流伺服電機復合驅動,記憶合金絲具有非線性、溫度滯后、時變和受環境溫度影響大的特點,并且其數學模型無法準確確定,傳統的PID控制方式難以實現有效的控制。筆者采用模糊控制與PID結合的方式,使用模糊語言實現PID參數的自適應調整和記憶合金絲的加熱電壓占空比的動態控制,與傳統的PID相比,模糊PID控制大大提高了系統的魯棒性,減少了超調量,提高了抗干擾能力,縮短了調整時間。
3.1 模糊PID控制器的結構
針對復合驅動仿生肘關節的特點,采用一種融合式的二維模糊PID控制器結構,如圖3。模糊控制器為雙輸入-四輸出,其中3個參數用來控制PID,另外一個用于控制記憶合金絲的加熱電壓的占空比。
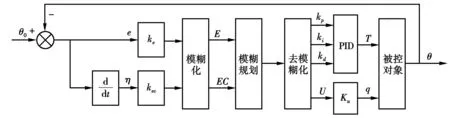
圖3 模糊PID自適應控制系統結構Fig.3 Structure diagram of fuzzy PID adaptive control system
圖中,θ0為肘關節的理論姿態值,e為肘關節角度的誤差值,η為肘關節角度誤差的變化率,T為電機的驅動力矩,q為記憶合金絲加熱電壓的占空比,θ為肘關節的運動姿態值。
模糊控制器推理算法采用Mamdani控制算法,去模糊化采用的是重心法。在每一個控制周期內,關節末端傳感器反饋的關節運動角度與理論角度的誤差與誤差變化率,乘以量化因子ke和kec轉換到各自的論域范圍內,通過模糊系統的模糊化處理得到輸入變量在每個模糊子集模糊處理后的語言值E和EC。通過模糊規則運算及去模糊化處理,得到kp、ki、kd和U,U乘以比例因子ku得到記憶合金絲的加熱占空比q,q和T共同控制復合驅動仿生肘關節,使關節按照預定軌跡進行相應的動作。
3.2 模糊控制規則
模糊控制器的輸入量e標準論域為{-6,-4,-2,0,2,4,6},輸入量η的標準論域為{-3,-2,-1,0,1,2,3},將輸入論域劃分為“負大”、“負中”、“負小”、“零”、“正小”、“正中”、“正大”7個模糊子集,各個模糊子集采用高斯隸屬度函數。模糊控制器的輸出量為ki、kd的標準論域為{-3,-2,-1,0,1,2,3},kp的標準論域和占空比q的標準論域為{-6,-4,-2,0,2,4,6},輸出變量的模糊子集與輸入變量的模糊子集一樣,但模糊函數采用三角形隸屬函數。
仿生肘關節運動方向(含轉動與俯仰運動)為正方向,當檢測到角度誤差為正且角度誤差變化率為正時,加大記憶合金絲的加熱電壓,同時增大電機的轉動角度,補償角度的正誤差;反之,當角度誤差變化率為負時,使記憶合金絲保持溫度穩定,防止系統超調,逐步減小電機轉動角度,實現電機的精準位姿控制。
輸入變量與輸出變量模糊子集均為{NB,NM,NS,ZO,PS,PM,PB},兩個輸入變量均為7個模糊子集,因此共有49條控制規則,表格中分別對應的是kp、ki、kd及U的模糊子集,具體控制規則如表1和圖4。
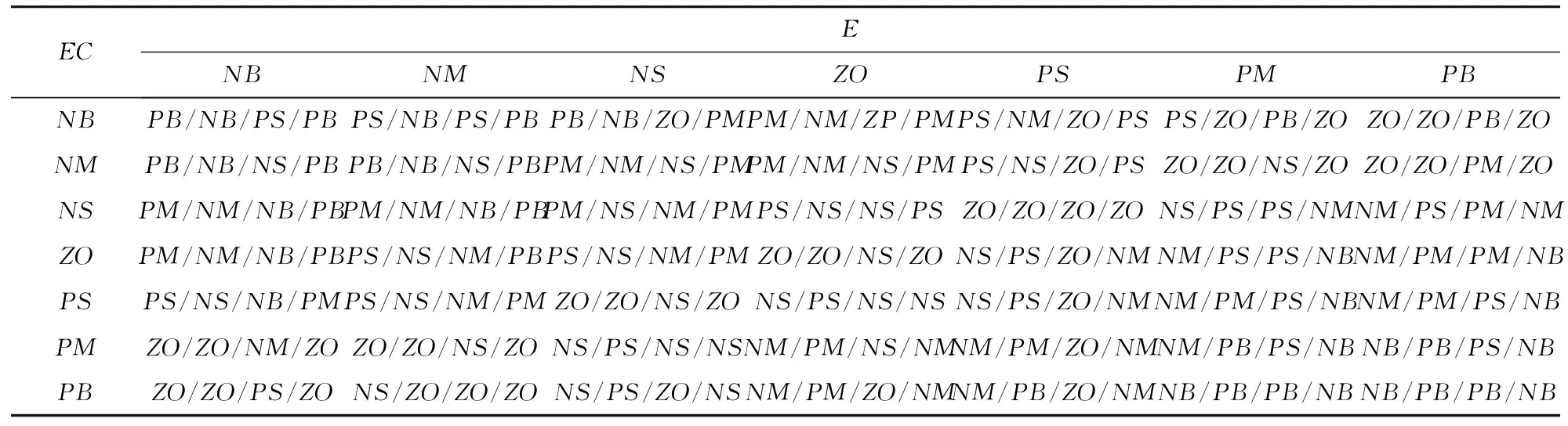
表1 模糊控制規則
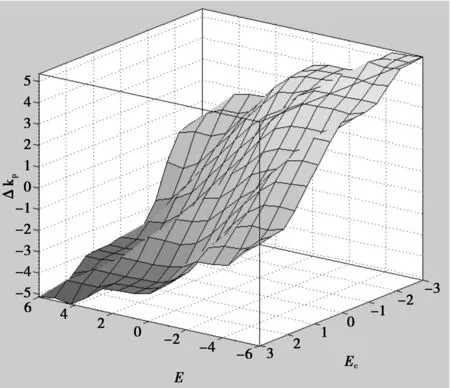
圖4 模糊規則輸出Fig. 4 Graph of fuzzy rule outputs
4 仿真驗證
復合驅動仿生肘關節的結構參數如下:仿生肘關節的質量為:1.845 kg,關節小臂的質量為:0.8 kg,仿生肘關節的轉動慣量為:3 496.1 kg·mm2,關節小臂的轉動慣量為:1 734.42 kg·mm2,仿生肘關節質心到關節大臂的質心距離為:164 mm,關節小臂質心到關節大臂的質心距離為:304 mm。
復合驅動仿生肘關節的階躍信號響應如圖5,模糊PID自適應控制與傳統的PID控制相比,大大提高了系統的魯棒性,減小了系統的超調量,縮短了調節時間。
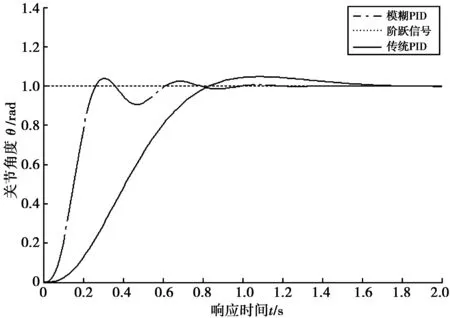
圖5 模糊PID自適應與傳統PID控制階躍響應Fig. 5 Step response of fuzzy PID adaptive control and traditional PID control
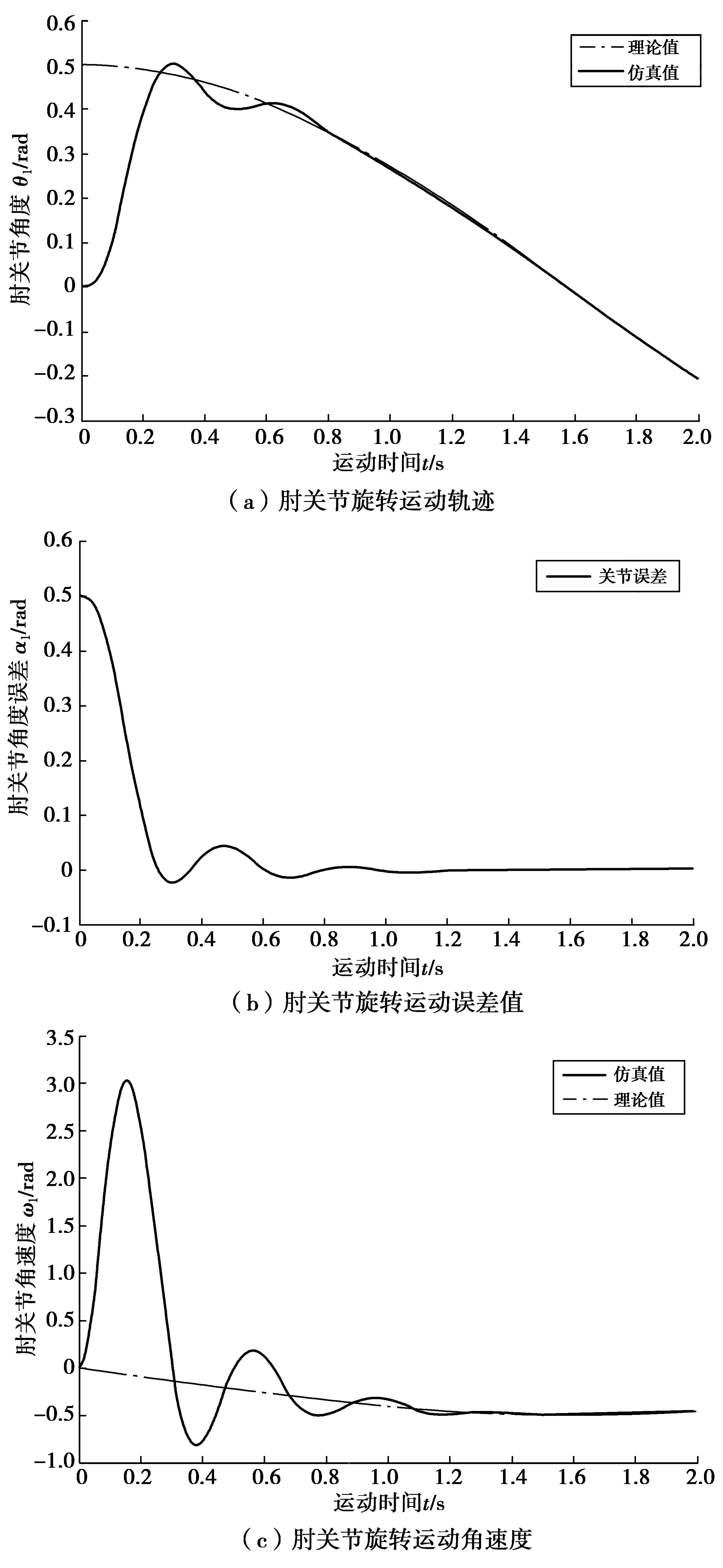
圖6 肘關節的旋轉運動Fig. 6 Rotational motion of elbow joint
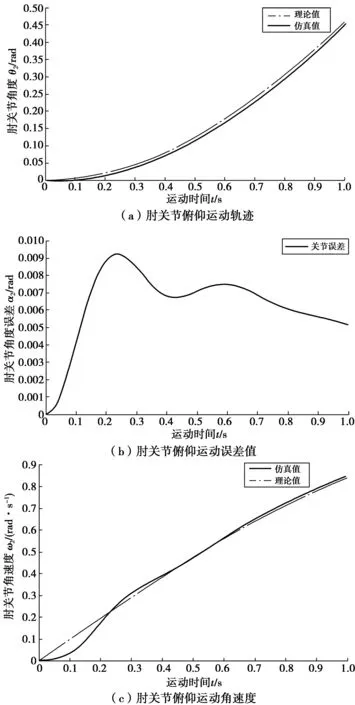
圖7 肘關節俯仰運動Fig. 7 Pitch motion of elbow joint
5 結 語
為了實現復合仿生肘關節的運動響應速度快,控制精度高,筆者采用模糊控制與PID控制結合的方式,建立雙輸入-四輸出的模糊控制器控制模式,在傳統的PID基礎上,設計出具有參數自適應的PID控制,同時利用模糊控制良好的非線性處理能力,解決了記憶合金絲溫控難題。實驗結果表明:本控制方案可以有效克服記憶合金絲非線性、溫度滯后、時變等問題,大大提升了系統的魯棒性,降低了響應時間,實現對記憶合金絲-電機復合驅動仿生肘關節的精準控制。
[1] 杜啟亮,張勤,田聯房,等.壓電陶瓷驅動微小型機器人的運動分析與仿真[J].西南交通大學學報,2011,46(3):415-420. DU Qiliang, ZHANG Qin, TIAN Lianfang, et al. Locomotion analysis and simulation of piezo-driven miniature robot[J].JournalofSouthwestJiaotongUniversity,2011,46(3): 415-420.
[2] 孫發明,徐新生,胡俊林,等.超磁機器魚游動數值模擬及其控制[J].大連理工大學學報,2010,50(5):631-637. SUN Faming, XU Xinsheng, HU Junlin, et al. Numerical simulation and control for swimming of robot fish of giant magnetostrictive material[J].JournalofDalianUniversityofTechnology, 2010, 50(5): 631-637.
[3] 劉昱,王濤,范偉,等.氣動肌肉群驅動球關節機器人的無模型自適應控制[J].機器人,2013,35(2):129-134. LIU Yu,WANG Tao,FAN Wei,et al. Model-free adaptive control for the ball-joint robot driven by PMA group[J].Robot, 2013,35(2):129-134.
[4] 王揚威,王振龍,李健.杭觀榮形狀記憶合金驅動仿生蝠鲼機器魚的設計[J].機器人,2013,35(2):129-134. WANG Yangwei, WANG Zhenlong, LI Jian. Hang Guanrong development of a biomimetic manta ray robot fish actuated by shape memory alloy[J].Robot, 2013,35(2): 129-134.
[5] 何建慧,章永華.基于形狀記憶合金驅動的仿生鯽魚尾鰭的設計和分析[J].工程設計學報,2012,19(1):9-15. HE Jianhui, ZHANG Yonghua. Mechanism design and analysis of a bionic crucian caudal fin driven by shape memory alloy actuator[J].JournalofEngineeringDesign, 2012,19(1):9-15.
[6] 李健,郭艷玲,王振龍.形狀記憶合金絲驅動的觸手推進式仿生水母[J].哈爾濱工業大學學報,2014,46(1):104-110. LI Jian, GUO Yanling, WANG Zhenlong. A bionic jellyfish robot propelled by bio-tentacle propulsors actuated by shape memory alloy wires[J].JournalofHarbinInstituteofTechnology,2014,46(1): 104-110.
[7] 胡冰山,吳明暉,付莊,等.差動式形狀記憶合金驅動器驅動的仿生吸盤[J].華中科技大學學報(自然科學版),2010,38(7):16-19. HU Bingshan, WU Minghui, FU Zhuang, et al. A bio-inspired suction cup actuated by a differential shape memory alloy actuator[J].JournalofHuazhongUniversityofScienceandTechnology(NaturalScienceEdition), 2010,38(7):16-19.
[8] 李揚,朱倩,徐志偉.SMA驅動變體機翼后緣精確控制研究[J].機械科學與技術,2013,32(7):1001-1005. LI Yang,ZHU Qian,XU Zhiwei. Research on the precise control of the morphing wing trailing edge actuated by SMA[J].MechanicalScienceandTechnologyforAerospaceEngineering,2013, 32(7): 1001-1005.
[9] 付宜利,劉浩,顏增翼,等.兩自由度導管機器人的動力學仿真研究[J].高技術通訊,2010,20(6):601-606. FU Yili, LIU Hao, YAN Zengyi,et al. Dynamic simulation research on a 2-DOF catheter robot[J].ChineseHighTechnologyLetters,2010,20(6):601-606.
[10] 王宏,姚熊亮,戴紹仕.基于SMA的關節驅動器的力學分析及控制[J].傳感器與微系統,2007,26(2):28-30. WANG Hong,YAO Xiongliang,DAI Shaoshi. Control and mechanics analysis on SMA joint actuator[J].TransducerandMicrosystemTechnologies,2007,26(2):28-30.
[11] 胡勝海,徐鵬,鄧坤秀,等.考慮腳掌轉動的跳躍機器人動力學與軌跡規劃[J].哈爾濱工程大學學報,2011,32(12):1605-1609. HU Shenghai,XU Peng,DENG Kunxiu,et al. Dynamic and trajectory planning of a hopping robot based on rotation of the sole[J].JournalofHarbinEngineeringUniversity,2011, 32(12):1605-1609.
[12] 黃海,方宏根,姜力,等.基于虛擬彈簧的欠驅動手指的動力學建模和控制[J].吉林大學學報(工學版),2010,40(6):1688-1692. HUANG Hai, FANG Honggen, JIANG Li,et al. Virtual spring based dynamic model and control of underactuated hand[J].JournalofJilinUniversity(EngineeringandTechnologyEdition),2010,40(6): 1688-1692.
(責任編輯:朱漢容)
Control Strategy and Simulation of Bionic Elbow Joint Compoundly Driven by SMA-Motor
LUO Tianhong, GUO Yuan, LIANG Shuang, LI Huilan, LI Qiaoyi
(School of Electrochemical & Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, P. R. China)
For the bionic elbow joint compoundly driven by SMA-motor with the characteristics of nonlinear, time varying and temperature hysteretic, the fuzzy control algorithm based on double inputs and four outputs was proposed and the fuzzy PID adaptive control model was established. The motion states of the composite driven bionic elbow were solved in the step response and the theoretical trajectory, and then the position and the angular velocity tracking graphs of the rotating and pitching motion of the elbow joint were obtained. Experimental results show that the design of dual-input and quadri-output adaptive fuzzy PID control has the characteristics of small overshoot, high system robustness and fast response speed, which can achieve the accurate position control of bionic elbow compoundly driven by SMA-motor.
mechanical and electrical engineering; compound driving; bionic elbow joint; fuzzy PID adaptive control
10.3969/j.issn.1674-0696.2017.07.20
2016- 04-22;
2016- 07-12
國家自然科學基金資助項目(51375519);重慶市研究生科研創新項目(CYS16190)
羅天洪(1975—),男,四川樂至人,教授,博士,主要從事機器人、機電液一體化等方面研究。E-mail:tianhong.luo@163.com。
TP13
A
1674-0696(2017)07-117-06
猜你喜歡
紡織科技進展(2023年10期)2023-11-23 10:04:52
化學教與學(2023年5期)2023-04-03 06:12:14
科海故事博覽(2021年33期)2021-12-08 05:39:00
廣東建材(2021年6期)2021-07-01 02:24:02
科學技術創新(2020年21期)2020-01-06 20:58:51
中學生數理化·八年級物理人教版(2019年12期)2019-05-21 07:26:42
科學中國人(2015年29期)2015-07-14 14:14:05
西南軍醫(2015年3期)2015-04-23 07:28:21
中國工程咨詢(2015年8期)2015-02-16 06:38:52
中國藥業(2014年24期)2014-05-26 09:00:33