基于直接橫擺力偶矩控制的中置軸汽車列車操縱穩定性研究*
2017-07-19 13:38:02任澤凱張京明張浩董金松張紅衛
汽車技術 2017年5期
關鍵詞:汽車
任澤凱張京明張浩董金松張紅衛
(1.交通運輸部公路科學研究院,運輸車輛運行安全技術交通行業重點實驗室,北京 100088;2.哈爾濱工業大學,威海 264209)
基于直接橫擺力偶矩控制的中置軸汽車列車操縱穩定性研究*
任澤凱1,2張京明2張浩1董金松1張紅衛1
(1.交通運輸部公路科學研究院,運輸車輛運行安全技術交通行業重點實驗室,北京 100088;2.哈爾濱工業大學,威海 264209)
建立了中置軸汽車列車4自由度參考模型及多自由度非線性仿真模型,并通過單移線實車試驗驗證了模型的正確性。利用模糊控制和PID控制方法建立了中置軸汽車列車橫擺力偶矩控制(DYC)模型,通過TrukSim及Simulink建立了聯合仿真平臺,并進行不同附著系數路面上單移線仿真。仿真結果表明,施加DYC后,列車低附著系數路面橫擺角速度后部放大系數和質心側偏角后部放大系數分別減小26.5%、29.9%,最大鉸接角速度減小18.4%,大幅改善了中置軸汽車列車的操縱穩定性,降低了折疊事故發生的可能性。
1 引言
GB 1589—2016中首次明確提出了中置軸汽車,中置軸汽車列車是我國貨運列車向模塊化較長貨車列車方向發展的重要環節,在不久的將來必將得到廣泛應用[1]。目前國內對中置軸汽車列車的研究尚少,因此,有必要對其操縱穩定性進行前瞻性研究,促進主動控制技術在交通運輸領域的發展,確保運輸安全。
汽車列車是多輛單車的組合,與單車相比較,運動自由度更多,運動狀態更加復雜,容易出現“折疊”“擺振”等失穩現象[2]。受列車后部放大系數的影響[3],列車在高速行駛過程中變換車道時,更容易出現“掛車甩尾”“側翻”等事故,嚴重影響運輸安全。除在結構上對列車參數進行優化以提高其操縱穩定性外,還可以通過增加主動控制技術確保其運行安全[4~6]。
2 模型建立
2.1 參考模型建立
根據汽車動力學理論,對中置軸汽車列車進行簡化。不考慮俯仰運動、側傾運動及各向載荷轉移,不考慮牽引銷(環)處的垂直載荷及阻尼,假設輪胎側偏特性處于線性區域,中置軸掛車雙軸相距很近,可以簡化為單軸,忽略空氣阻力及滾動阻力,得到中置軸汽車列車單軌4自由度模型,如圖1所示。

圖1 中置軸汽車列車單軌模型
相比于普通半掛汽車,中置軸汽車列車的鉸接點位于牽引車后橋之后,鉸接點處垂直載荷很小,可以忽略除縱向力、側向力以外的各向力和力矩,則牽引銷處受力對整車橫擺運動產生的力矩為FAy(b1+c),其對牽引車橫擺運動產生的影響較半掛車大很多。因此,牽引車橫擺運動方程為:

中置軸掛車的另一個特點是其質心靠近車軸處,牽引銷處承載的垂直載荷比半掛車小得多,因此,中置軸掛車的橫擺運動方程為:

牽引車、中置軸掛車側向運動方程為:

式中,r1、r2分別為牽引車和掛車的橫擺角速度;m1、m2分別為牽引車和掛車的質量;u1、u2分別為牽引車和掛車的縱向速度;Iz1、Iz2分別為牽引車和掛車繞Z軸的轉動慣量;a1、b1分別為牽引車質心到前軸和后軸的距離;a2、b2分別為中置軸掛車質心到牽引環和車軸的距離;Fy1、Fy2、Fy3分別為第1軸、第2軸、第3軸車輪的側向力;FAy、FTy分別為牽引銷和牽引環所受的側向力;c為牽引銷到牽引車后軸距離;β1、β2分別為牽引車和掛車的質心側偏角;δ為轉向輪轉角。
假定輪胎側偏特性為線性特性,則

牽引車和中置軸掛車速度耦合方程為:

式中,v1、v2分別為牽引車和掛車側向速度。
牽引車和中置軸掛車鉸接點力耦合方程為:

列車鉸接角為牽引車和中置軸掛車車身縱線所成的夾角,受車廂尺寸的限制,本文研究的中置軸汽車列車的鉸接角較半掛汽車列車小,其滿足:

當Δφ、δ很小時,cosΔφ=1,sinΔφ=0,cosδ=1,則

可得運動微分方程:


同時,考慮路面附著系數[7]須滿足

式中,μ為路面附著系數。
則參考橫擺角速度為:

2.2 非線性仿真模型建立
采用汽車動力學仿真軟件TruckSim建立多自由度非線性仿真模型,中置軸汽車列車的基本仿真參數如表1所示。

表1 中置軸汽車列車仿真參數
3 仿真模型的實車驗證
根據GB/T 25979的要求對試驗樣車開展單移線試驗。試驗在列車滿載狀態下進行,轉向盤輸入為頻率0.25 Hz的正弦信號,試驗車速為80 km/h,試驗樣車如圖2a所示,相關參數見表1。利用VBOX數據采集系統檢測列車運行狀態,RT陀螺儀安裝在底盤橫梁處,如圖2b所示。


圖2 試驗樣車及測試設備
利用VBOX、RT陀螺儀等設備檢測列車的橫擺角速度、質心側偏角等關鍵指標,并利用前述TruckSim和Simulink仿真模型進行仿真驗證,試驗與仿真結果如圖3所示。
對比實車試驗和仿真的結果可以看出,反映中置軸汽車列車主要特性的關鍵參數變化趨勢一致,吻合情況較好。因此,所建立的中置軸汽車列車仿真模型能夠反映列車的響應特性,從而驗證了理論模型的正確性及仿真模型的可靠性。


圖3 試驗與仿真結果
4 橫擺力偶矩控制策略
中置軸汽車列車橫擺力偶矩控制(Direct Yaw moment Control,DYC)原理如圖4所示。設計原則是使牽引車橫擺角速度跟隨參考值,同時盡量降低鉸接角速度以減小后部放大系數。采用模糊控制的方法動態調節DYC介入的門限。通過PID控制器計算所需制動力矩,并結合控制門限值最終確定實際輸出制動力矩。通過制動力分配策略,控制列車某車輪進行制動(忽略側向力的影響),以提供相應的橫擺力偶矩,改善汽車列車的行駛穩定性。聯合仿真頂層模型如圖5所示。

圖4 橫擺力偶矩控制原理
4.1 基于模糊控制的DYC介入門限策略
在不同車速、路面附著條件、車輪轉角速度條件下,DYC介入的時機應不同[8]。本文利用模糊控制器,設計了不同工況下的DYC介入門限。控制器的輸入信號為車速u、路面附著系數μ、車輪轉角速率δ?,輸出值為橫擺角速度偏差門限Tr和鉸接角速度門限TΔφ。當實際橫擺角速度與參考橫擺角速度偏差大于Tr或鉸接角速度大于TΔφ時,控制系統介入。

圖5 聯合仿真頂層模型
u的基本論域為[0,100],量化因子取100。μ的基本論域為[0,1],量化因子取1。δ?的基本論域為[0,2.5],量化因子取2.5。Tr的基本論域為[0,0.05],比例因子取0.05。TΔφ的基本論域為[0,0.03],比例因子取0.03。模糊控制器輸入、輸出變量隸屬度函數及模糊集合如圖6所示,模糊規則如表2所示。
4.2 PID制動力矩計算模型
PID控制通過調節相關參數可以實現對目標對象良好的跟蹤。汽車DYC通常以穩態橫擺角速度響應作為跟蹤對象。對于中置軸汽車列車而言,還應盡量減小鉸接角速度,以降低后部放大系數,避免折疊事故,保持列車的穩定性。因此,本文選取由式(16)確定的參考橫擺角速度作為貨車牽引車的跟蹤目標,選取鉸接角速度作為中置軸掛車的跟蹤目標,建立2個PID控制器計算DYC中所需的制動力矩。貨車牽引車PID控制器的比例系數、積分時間常數、微分時間常數分別取0.85、0.20、0.45,中置軸掛車PID控制器的比例系數、積分時間常數、微分時間常數分別取0.80、0.30、0.40。


圖6 模糊控制器輸入輸出隸屬度函數

表2 模糊邏輯規則
4.3 制動力分配策略
不同車輪施加制動對DYC產生的效果不相同[9],對兩軸貨車牽引車的前外輪和后內輪施加制動力所產生的DYC效果最明顯。DYC制動力分配方案除考慮橫擺角速度外,還應考慮駕駛員的轉向意圖[10]。因此,本文增加了車輪轉角速率δ?作為參考,制定貨車牽引車制動力分配策略如表3所示,其中,“+”“-”表示該值的符號。
根據GB 1589—2016的要求,中置軸掛車的質心應緊靠車軸。因此,可以認為對中置軸掛車同側車輪施加制動力所產生的DYC具有相同的效果。傳統單車DYC的輸入信號通常為橫擺角速度和質心側偏角,考慮到影響汽車列車操縱穩定性的重要因素之一是鉸接角速度,且本文研究的中置軸汽車列車中的中置軸掛車大部分載荷由掛車單獨承擔,對牽引貨車的影響較小,故本文對中置軸掛車進行橫擺力偶矩控制的目標是盡量減小鉸接角速度。所以當鉸接角速度大于0時,控制掛車左側車輪;小于0時,控制掛車右側車輪;等于0時,不對掛車車輪施加控制。

表3 貨車牽引車制動力分配方案
為了防止車輪制動發生抱死,設定各車輪滑動率不超過0.25。
5 仿真分析
以本文建立的聯合仿真模型為平臺,選取單移線試驗進行仿真,以橫擺角速度、質心側偏角等為指標,分析中置軸汽車列車DYC對汽車列車操縱穩定性的影響。低路面附著系數取0.4,高路面附著系數取0.8,移線寬度為3.5 m,仿真車速為80 km/h。仿真結果見表4及圖7~圖13。
圖7所示為單移線試驗軌跡仿真結果,其中,X、Y與整車坐標系方向一致。由表4和圖7可以看出,施加DYC后,列車跟隨目標軌跡效果更好,牽引車和中置軸掛車超調量明顯減小。相比于高附著系數路面,不施加DYC的列車在低附著系數路面的軌跡超調量明顯增大,調節時間也明顯增加,而施加DYC后則有很大改善。
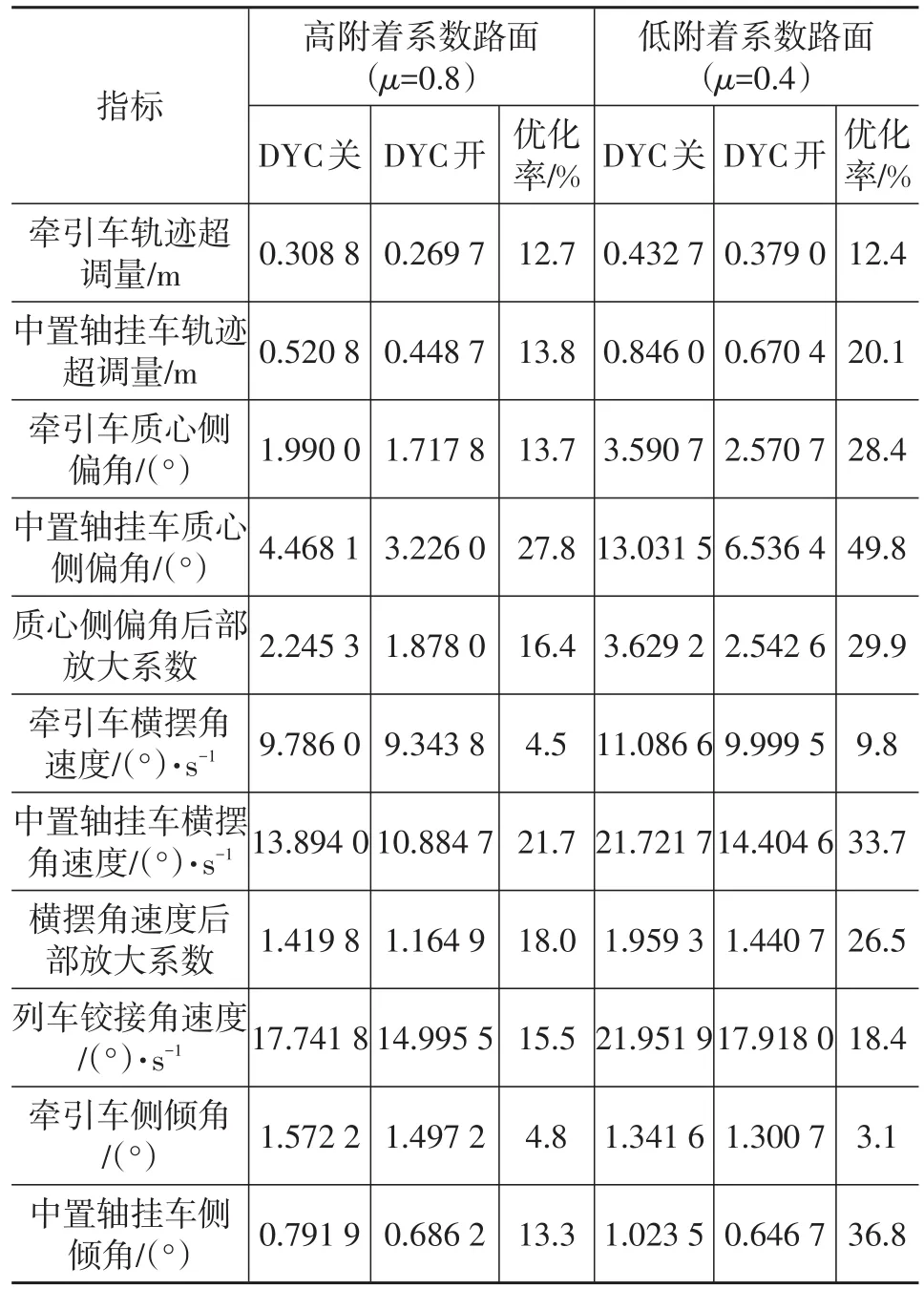
表4 單移線仿真結果

圖7 單移線試驗軌跡
圖8所示為列車在兩種附著系數路面上橫擺角速度響應。可以看出,施加DYC后能明顯降低牽引車和中置軸掛車的橫擺角速度峰值,縮短進入穩態所需的時間,對掛車的橫擺角速度改善尤為明顯。由于路面附著系數降低,中置軸掛車的橫擺角速度響應后部放大效果更加明顯,較大的后部放大系數嚴重影響列車高速行駛穩定性[3]。施加DYC后,列車在低附著系數路面上的橫擺角速度后部放大系數降低26.5%,這對提高列車的穩定性有重要意義。

圖8 橫擺角速度響應
圖9所示為列車鉸接角速度在高、低附著系數路面上的仿真結果。鉸接角速度是汽車列車須考慮的重要因素[11]。可以看出,在低附著系數路面上,列車鉸接角速度幅值增加且振蕩周期加長,極易造成折疊、側翻事故。施加DYC后,列車的鉸接角速度幅值大幅減小,低附著系數路面上改善效果達18.4%,且能快速進入穩定狀態,大大降低了折疊事故發生的可能性,提高了列車穩定性。
質心側偏角是影響汽車操縱穩定性的重要指標[12],其仿真結果見圖10。由圖10可以看出,施加DYC后,中置軸汽車列車質心側偏角均明顯減小,且響應更加迅速。在低附著系數路面上,質心側偏角后部放大系數降低29.9%,這有利于及時調整列車運行方向,提高汽車列車的操縱性能。

圖9 鉸接角速度響應

圖10 質心側偏角響應
側傾角雖然不是汽車橫擺力偶矩控制的直接對象,但由于汽車列車整體穩定性能得到提高,牽引車和中置軸掛車的側傾角幅值也得到一定程度的降低,如圖11所示,說明車身穩定性控制系統在一定程度上也能改善汽車抗側翻性能[13]。


圖11 側傾角響應
車輪制動力矩仿真結果如圖12所示。由圖12可以看出,在列車運動狀態變化較大的第4 s~第6 s,PID輸出制動力矩較大,以便糾正列車姿態。此后列車趨于穩定狀態,PID輸出制動力矩較小。低附著系數路面上各輪制動更加頻繁,以不斷調整列車姿態。圖13顯示了中置軸汽車列車各車輪的滑動率。在高附著系數路面上,各車輪滑動率都很低,沒有發生抱死,控制效果較好。在容易發生車輪抱死的低附著系數路面上,最大滑動率維持在目標值附近,車輪沒有出現抱死,保證了良好的附著性能。
6 結束語
本文建立了中置軸汽車列車動力學模型,并通過實車試驗驗證了模型的正確性,為中置軸汽車列車的理論研究提供有益參考。以車速u、路面附著系數μ、車輪轉角速率δ?為輸入,橫擺角速度偏差門限和鉸接角速度門限為輸出,設計了中置軸汽車列車DYC介入門限策略,有利于DYC適應多種工況。同時,設計了貨車牽引車和中置軸掛車在施加DYC時采用的制動力分配方案。通過仿真驗證了所建立的DYC模型的有效性,較好地改善了中置軸汽車列車的操縱穩定性。下一步可以考慮橫擺力偶矩控制和汽車列車ABS的集成控制,并考慮響應時間的影響,促進研究成果進一步實用化。


圖12 車輪制動力矩

圖13 各車輪滑動率
1 馬增榮.中置軸貨車列車-商品車公路運輸未來的主流裝備.物流技術與應用(貨運車輛),2009(3):66~68.
2 Fayed M A E E,Ghany M A.Simulation of tractor semitrailer manoeuvre at high speed using MATLAB/ SIMULINK.InternationalJournalofHeavy Vehicle Systems,2011,18(4):341~358.
3 Dahlberg E,Stensson A.The dynamic rollover threshold-a heavy truck sensitivity study.International Journal of Vehicle Design,2006,40(1~3):228~250.
4 Hac A,Fulk D,Chen H.Stability and Control Considerations ofVehicle- Trailer Combination.Sae International Journal of Passenger Cars Mechanical Systems,2009,1(1):925~937.
5 Nagai R.Stabilization of Passenger Car-Caravan Combination Using Four Wheel Steering Control.Vehicle System Dynamics,1995,24(24):313~327.
6 Fernández M A A,Sharp R S.Caravan Active Braking System-Effective Stabilisation of Snaking of Combination Vehicles.Automotive and Transportation Technology Congress and Exposition,Barcelone,2001.
7 于志新,宗長富,何磊,等.基于LQR的重型半掛汽車列車穩定性控制策略.中國公路學報,2011,24(2):114~119.
8 李壽濤,馬用學,郭鵬程,等.一種變邏輯門限值的車輛穩定性控制策略研究.汽車工程,2015(7):782~787.
9 Yamamoto M,Koibuchi K,Fukada Y,et al.Vehicle stability control in limit cornering by active brake.Jsae Review,1995,16(3):323.
10 余卓平,高曉杰,張立軍.用于車輛穩定性控制的直接橫擺力矩及車輪變滑移率聯合控制研究.汽車工程,2006,28(9):844~848.
11 韋超毅.拖掛式房車列車操縱穩定性研究:[學位論文].鎮江:江蘇大學,2008.
12 王德平,郭孔輝,宗長富.車輛動力學穩定性控制的理論研究.汽車工程,2000,22(1):7~9.
13 金智林,翁建生,胡海巖.汽車側翻預警及防側翻控制.動力學與控制學報,2007,5(4):365~369.
(責任編輯 斛 畔)
修改稿收到日期為2017年3月13日。
Research on Handling Stability of Centre Axle Trailer Train Based on Direct Yaw Moment Control
Ren Zekai1,2,Zhang Jingming2,Zhang Hao1,Dong Jinsong1,Zhang Hongwei1
(1.Key Laboratory of Operation Safety Technology on Transport Vehicles,Research Institute of Highway,Ministry of Transport,Beijing 100088;2.Harbin Institute of Technology,Weihai 264209)
Reference dynamic model of centre axle trailer train with 4-DOF and nonlinear simulation model with multi-DOF were established.Single lane change test was carried out to verify the correctness of the models.Direct Yaw moment Control(DYC)model was constructed based on PID and fuzzy control.Single lane change test simulations with different road adhesion coefficients were carried out through the established co-simulation platform based on TruckSim and Simulink.Simulation results showed that DYC could improve handling stability of centre axle trailer train obviously as the rear amplifications for yaw rate and sideslip angle were reduced by 26.5%and 29.9%respectively.The maximum articulated angle rate was reduced by 18.4%and handling stability of centre axle trailer train was improved obviously, decreasing the possibility of jackknifing occurring.
Handling stability,Direct yaw moment control,Centre axle trailer train,Fuzzy control
操縱穩定性;橫擺力偶矩控制;中置軸汽車列車;模糊控制
U469.5
A
1000-3703(2017)05-0006-08
交通運輸部應用基礎研究項目(2014319223020);中央級公益性科研院所基本科研業務費專項資金項目(2015-9019)。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
