6R輕量化關節機器人的靜剛度建模及分析
2017-07-17 01:21:54高曉飛李春書齊立哲閆堯
河北工業大學學報 2017年3期
高曉飛,李春書,齊立哲,閆堯
(1.河北工業大學機械工程學院,天津300130;2.智通機器人有限公司研發部,天津301739)
6R輕量化關節機器人的靜剛度建模及分析
高曉飛1,李春書1,齊立哲2,閆堯1
(1.河北工業大學機械工程學院,天津300130;2.智通機器人有限公司研發部,天津301739)
串聯機器人末端的形變對機器人作業的精準性會產生影響,為了提高機器人的絕對定位精度,通過對6R輕量化關節機器人末端撓性變形的分析研究,綜合考慮了包括伺服電機傳動變形和諧波減速器傳動變形在內的關節變形,以及機器人各個臂桿末端的彎曲變形、扭轉變形和拉伸變形,分別建立了機器人關節和臂桿的靜剛度模型.然后,分析了基于該剛度模型的關節變形和臂桿變形分別在機器人末端的映射關系,得到了機器人末端的總撓度變形.最后,基于機器人的剛度模型利用Matlab分析軟件對實例進行分析,所得結果與其利用有限元分析的結果相對比,驗證了靜剛度模型的正確性和有效性.其對輕量化機器人的設計分析及其運動控制具有指導作用.
輕量化串聯機器人;靜剛度模型;關節變形;臂桿變形;有限元分析
0 前言
隨著機器人技術的發展,工業機器人在實際工程中得到了廣泛的應用.輕量化機器人相對于傳統的工業機器人來說具有質量輕、體積小、易裝配、控制靈活等特點[1],但是在某些精度要求比較高的任務作業中機器人末端的撓度變形不能被忽略,特別是對于機器人末端絕對定位精度要求較高的工作任務,如醫療、精密裝配、噴涂等,必須將其末端變形控制在一定的范圍內.因此,輕量化機器人在負載作用下既要滿足強度要求,也要滿足剛度要求.
目前,對于機器人剛度分析的方法主要有3種:1)忽略關節變形,建立臂桿剛度,研究臂桿變形與末端形變的關系[2-3];2)忽略臂桿變形,建立關節剛度,研究關節變形與末端形變的關系[4-6];3)綜合考慮關節變形和臂桿變形在機器人末端的映射,建立整體的剛度模型,得出臂桿變形和關節變形分別與末端形變的映射關系[7-10].本文基于第3種研究方法針對6R關節機器人,通過建立關節和臂桿的靜剛度模型,分析了關節變形和臂桿變形在機器人末端的映射關系,得出機器人末端的總撓度變形,為了更好的研究臂桿的壁厚變化對于機器人末端變形的影響,通過對電機和減速器的選型,減小關節變形,在一定的精度要求范圍內忽略了關節變形,只研究了臂桿桿徑的變化對于機器人變形的影響,并給出了驗證.
1 機器人結構分析
1.1 機器人本體結構分析
圖1所示的為6R關節式機器人,由腰部、大臂、小臂和腕部3個轉動關節組成.機器人關節由驅動器、伺服電機、減速器和編碼器等零部件組成,各臂桿均為空心圓桿,可將控制線放于機器人內腔中,使得整體結構簡潔靈巧、裝配方便.機器人關節和臂桿的接口為模塊化接口,針對于不同的任務作業,能夠更換不同參數的關節和臂桿,具有廣泛的應用前景.
1.2 連桿坐標系的建立
采用D-H法建立6R機器人的連桿坐標系,如圖2所示,機器人各連桿的D-H參數如表1所示.
設iRi-1為相鄰桿系的變化矩陣,可表示為

圖1 機器人本體Fig.1 The mechanical arm body

機器人末端坐標系在基坐標系下的轉換矩陣表示為:

該矩陣可寫成如式(2)表示的形式:
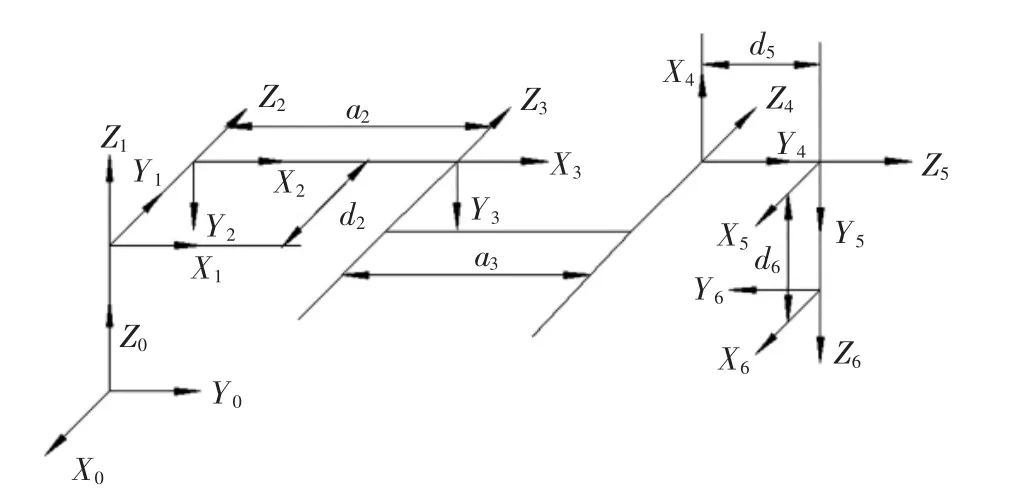
圖2 機器人坐標系Fig.2 The mechanical arm coordinate system
式中:[nxnynz]T表示機器人末端x軸在基坐標系中的方向矢量;[oxoyoz]T表示機器人末端y軸在基坐標系中的方向矢量;[axayaz]T表示機器人末端z軸在基坐標系中的方向矢量;[pxpypz]T表示機器人末端在基坐標系中的位置矢量.

表1 連桿參數Tab.1 Parameters of connecting rod
2 靜剛度模型的建立
2.1 建立關節剛度模型
機器人末端的撓度變形主要來源于各關節變形和臂桿變形,針對于本課題研究的機器人,關節變形主要考慮諧波減速器傳動變形和電機的傳動變形,而臂桿變形主要考慮機器人臂桿的彎曲變形、拉伸變形和扭轉變形.
該機器人選用科爾摩根伺服電機,型號為KBM57和KBM43,該電機的扭轉剛度為

式中:t為電機的機械時間常數,s;J為電機轉子的轉動慣量,kg·m2.
減速器選用哈默納克諧波減速器,型號為HDSHD14-80和HDSHD17-50,其剛度K諧為

式中:T為傳遞扭矩;Ψ為轉角誤差.則關節的等效剛度K等效為

關節i的變形量Δδθi和所傳遞力矩τi的關系為

其寫成矩陣形式,可表示為

建立速度雅可比矩陣Δ=JΔδθ和力雅可比矩陣σ=JTF,定義剛度矩陣為Kz=F/ΔX.
其中:F為機器人臂桿末端廣義力;ΔX為末端廣義變形,聯立可得

根據關節的結構組成得到關節變形在機器人臂桿末端的映射為

2.2 建立臂桿剛度模型
把機器人臂桿當作一個彈性體處理,假設臂桿的材料均勻,各向同性,本構關系滿足胡克定律,各桿的橫截面面積相等,不考慮偏心,桿的變形滿足柔性桿小變形假設理論[7],柔性桿的變形包括拉伸變形、彎曲變形和扭轉變形,如圖3所示.

圖3 柔性桿變形Fig.3 Deformation of flexible rod
圖3中Δxi1和Δxi2分別表示臂桿在關節力Fxi、彎矩Mxi作用下產生的x方向的變形;Δyi1和Δyi2分別表示臂桿受到關節力Fyi、彎矩Myi產生的y方向的變形,Δli表示臂桿受到Fzi作用產生的z方向的變形,Δoi是由于臂桿受到扭矩Ti產生的扭轉變形.由胡克定律可以得到:

式中:Ai為臂桿截面面積;EIi為臂桿i的彎曲剛度;GIi表示扭轉剛度;且當機器人臂桿的外徑為D,內外徑比值為α時,彎曲慣性矩和扭轉慣性矩可分別表示為

機器人臂桿的剛度矩陣可表示為

則機器人臂桿的末端變形量的表達式為

如圖4所示,不考慮機器人末端形變時,機器人末端的坐標系在基坐標系中的表達為Σ6,考慮機器人末端形變時,其末端坐標系在基坐標系中的表達為Σ6′.設由Σ6到Σ6′的變換矩陣為ΔT,變形后的坐標轉換矩陣0R6′可表示為
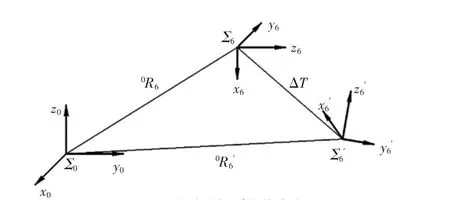
圖4 末端坐標系的撓度變形Fig.4 Deflection of end coordinate system
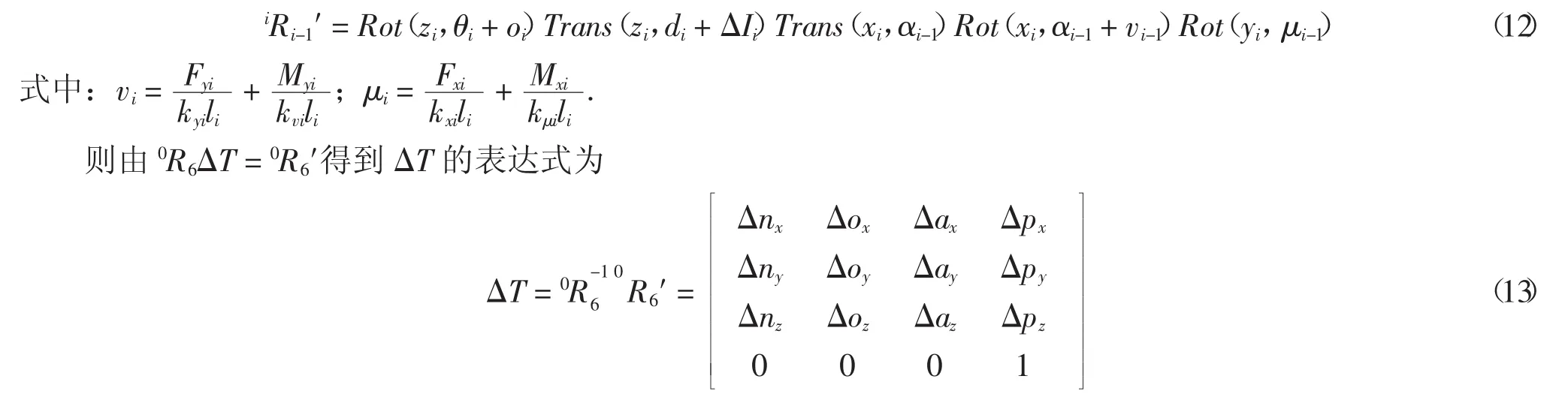
其中[ΔpxΔpyΔpz]T為機器人末端線形變量的矢量表達式.
利用通用旋轉變換[11]中的等效轉角可求得坐標系Σ6′在坐標系Σ6中的旋轉變換,即:

所以機器人臂桿變形在末端的映射為

根據線性疊加原理,機器人末端的總變形為

3 實例仿真分析和驗證
為了驗證所建剛度模型的正確性,下面通過實例仿真的方法進行分析.如圖5所示的為機器人運行過程中的1條曲線,末端負載為100 N,要求運動過程中機器人的重復定位精度不小于±0.1 mm,且運動過程無明顯振動.根據任務要求,現對機器人的剛度模型進行分析,分析過程如下.
首先根據任務要求,初步選定機器人的臂桿參數,建立機器人的三維模型,然后導入到Adams中進行仿真分析,得出機器人各關節所需的驅動力矩大小τi,如圖6所示,根據仿真數值對機器人電機和減速器進行選型,由于本文研究的機器人是模塊化的機器人,為了增加機器人末端承受負載的范圍,在電機進行選型時應盡量選擇電機扭矩變化范圍比較大的型號,得出了電機和減速器的性能參數,然后根據式(3)和式(4)計算出電機和減速器的剛度,再根據式(5)得出各個關節的等效剛度Kθi,根據式(8)、式(9)可得到機器人的關節剛度和機器人的關節變形在機器人末端的映射Kz和Δδθ.已知機器人的末端負載,根據動力學逆解可以得到機器人各個關節的力fi與力矩ni,選擇機器人的材料,確定彈性模量E和泊松比μ,根據式(10)可以得出機器人每個關節的臂桿變形Δδi,根據式(13)到式(14)可以得出機器人臂桿變形在機器人末端的映射Δδl.借助于Matlab計算軟件對該過程進行編程計算,分別分析關節剛度和臂桿剛度對機器人剛度的影響,計算結果如表2所示.
圖5 曲線軌跡圖Fig.5 Curve trace
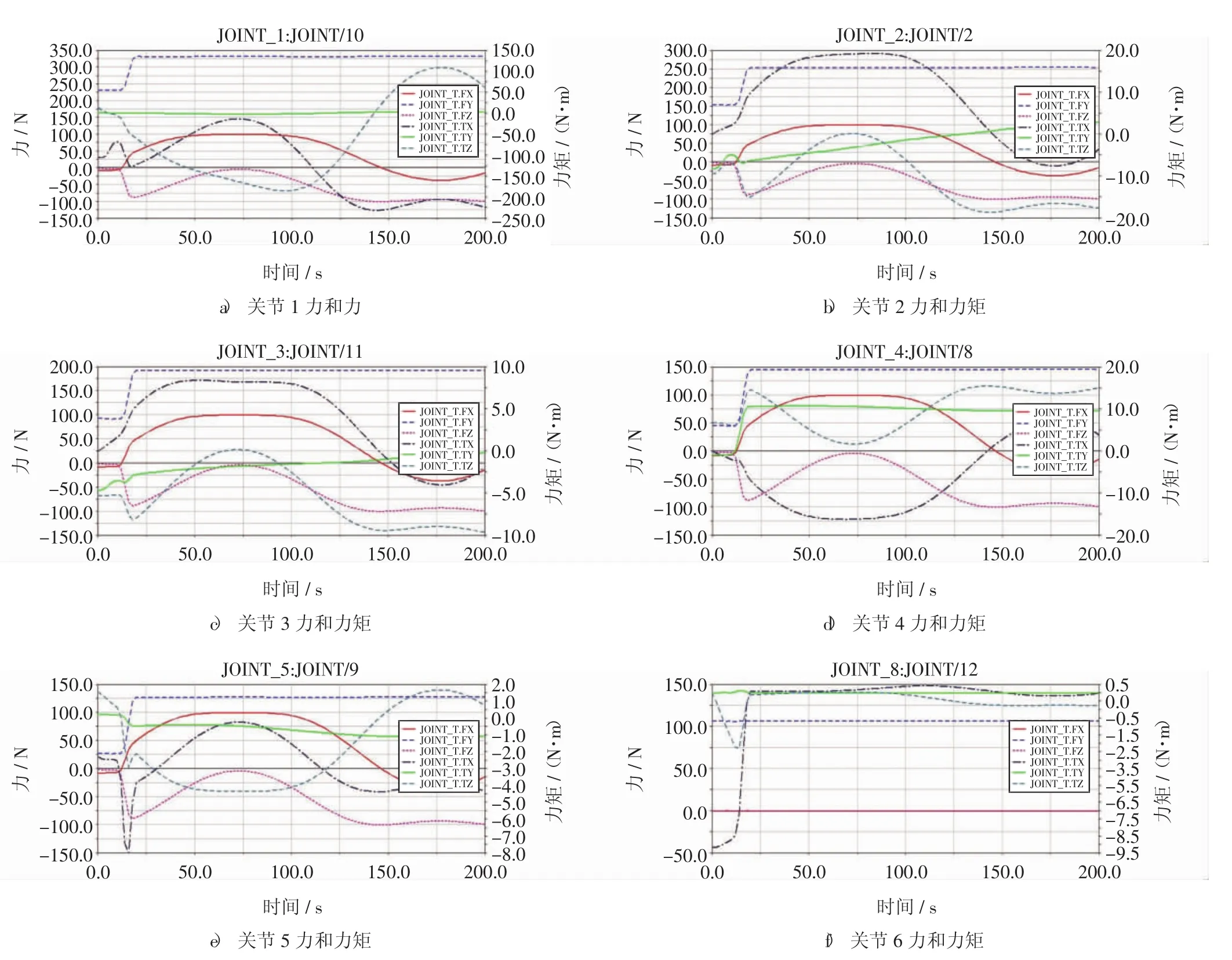
圖6 各關節力矩Fig.6 Each joint torque
從分析結果看,機器人的關節變形在機器人末端的映射值要小于機器人的設計要求,所以在分析過程中為了方便對臂桿變形的分析,忽略機器人的關節變形,只考慮機器人的臂桿剛度對機器人操作精度的影響.
選定機器人材料為鋁合金7075-T6,彈性模量為72 GPa,剪切模量為36.9 GPa,泊松比為0.33,屈服強度為505 MPa,密度為2 810 kg/m3.設定機器人的臂桿外徑相同,取值為100 mm,臂桿內徑不同,取不同的值進行驗證.臂桿內徑分別取95 mm,90 mm,85 mm,80 mm,建立不同參數的機器人的模型.結果如表3計算撓度所示.

表2 關節變形和臂桿變形在機器人末端的映射Tab.2 Mapping of joint deformation and bar deformation at the end of robot
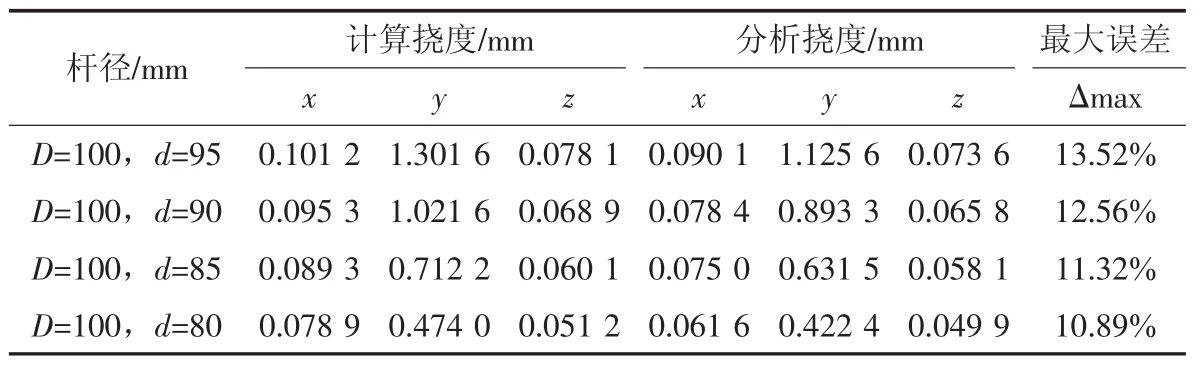
表3 水平姿態下機器人桿的末端撓度Tab.3 The end deflection of the mechanical arm in horizontal posture
將不同的機器人模型導入到有限元分析軟件abaqus中,定義材料屬性,添加連桿之間的相互作用和載荷,建立分析步,劃分網格,進行有限元分析,由圖7和圖8可以看出,機器人在臂桿伸展的位姿下產生的末端變形最大,對該位姿下的末端撓度變形進行驗證,在機器人末端y方向施加100 N的載荷,通過對相同外徑,不同內徑臂桿的機器人進行分析,得出如表2所示的數據,分析撓度為機器人在水平位姿下通過有限元分析得到的末端形變,計算撓度是通過Matlab將上述分析方法編程計算得出的機器人末端撓度,最大誤差是x、y、z3個方向的計算撓度和分析撓度之差與計算撓度的比值.圖9是機器人臂桿外徑為100mm,內徑為90 mm時的分析結果.通過表2中的數據對比可以看出分析結果與計算結果趨勢基本一致,驗證了剛度模型的正確性.
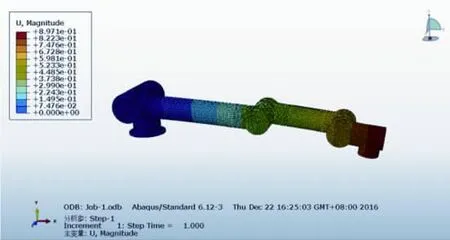
圖7 水平姿態形變分析結果Fig.7 Horizontal posture deformation analysis results
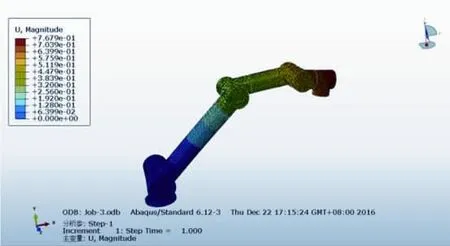
圖8 一般姿態形變分析結果Fig.8 Ordinary posture deformation analysis results
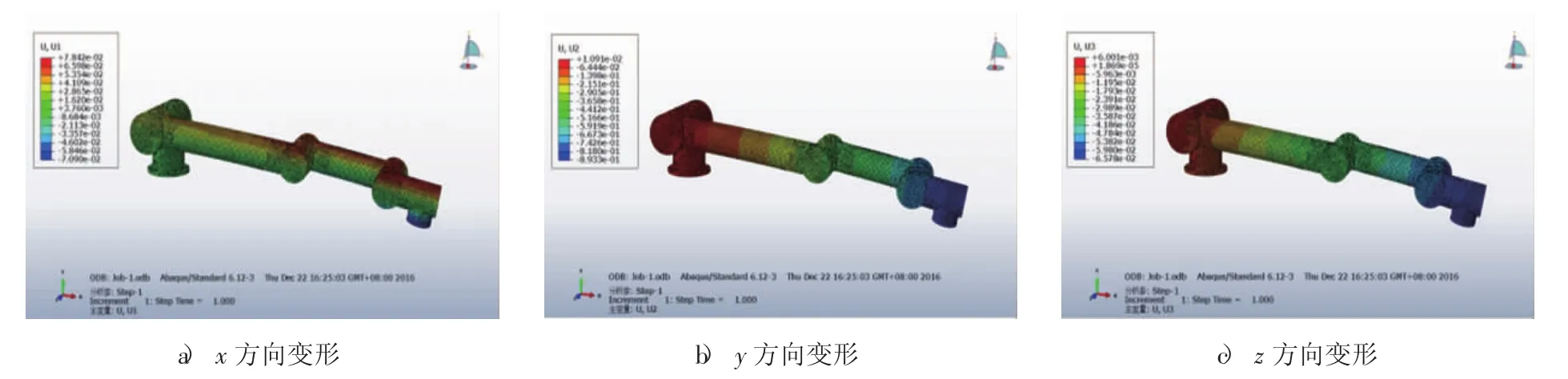
圖9 x、y、z方向形變分析結果Fig.9 The deformation analysis results for xyz-directions
4 結論
通過對機器人關節變形和臂桿變形在機器人末端的撓度映射的研究,建立了機器人的關節剛度模型和臂桿剛度模型,得出了機器人臂桿的最終撓度變形,并通過Matlab軟件將分析過程編程,計算出不同臂桿參數對應的機器人末端撓度大小,運用有限元分析軟件和動力學仿真軟件對機器人進行的靜態和動態性能分析,結果驗證有限元分析結果和計算結果的變化趨勢基本一致,驗證了靜剛度模型的正確性和分析方法的有效性,為該類型的機器人提供了有效的剛度分析方法.
[1]錢燦榮.移動服務機器人機械臂結構設計及輕量化的研究[J].成都工業學院學報,2016,19(2):24-26.
[2]劉延杰,吳明月,王剛,等.硅片傳輸機器人手臂結構優化設計方法[J].機械工程學報,2015,51(1):1-9.
[3]羅忠,梁樂,陳燕燕,等.細長機械臂的剛度靈敏度分析與參數優化[J].東北大學學報(自然科學版),2011,32(9):1319-1323.
[4]宗光華,張慧慧.機器人終端撓度的算法[J].北京工業大學學報,1990,16(4):48-57.
[5]沈孝棟,劉長毅,張柏壽.考慮關節柔性的機器人制孔過程動力學仿真[J].機械設計與制造,2015(3):196-200.
[6]林義忠,廖小平,曾劍.6R噴涂機器人操作臂末端剛度的分析[J].廣西大學學報(自然科學版),2011,36(2):234-240.
[7]張永貴,劉文洲,高金剛,等.切削加工機器人剛度模型研究[J].農業機械學報,2014,45(8):321-327.
[8]樓向明,曹家鑫,梅江平,等.高速重載碼垛機器人靜剛度分析[J].機械制造與自動化,2013,42(3):158-161.
[9]Joseph Sun de la Cruz,Dana Kulic,William Owen.Learning inverse dynamics for redundant manipulator control[J].Autonomous and Intelligent Systems,2010:1-6.
[10]Pashkevich A,Chablat D,Wenger P.Stiffness analysis of over constrained parallel mainpulators[J].Mechanism and Machine Theory,2009,44(5):966-982.
[11]殷際英,何廣平.關節型機器人[M].北京:化學工業出版社,2003.
[責任編輯 田豐夏紅梅]
On static stiffness modeling of 6R lightweight joint robot
GAO Xiaofei1,LI Chunshu1,QI Lizhe2,YAN Yao1
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.R&D Department,Inersmat Robotic System Co Ltd,Tianjin 301739,China)
The precision of robot operation is affected by the end deformation of the serial robot.In order to improve the absolute positioning accuracy of robot,the static stiffness model of robot joints and arms is set up,through the analysis of the end deflection of lightweight 6R joint robot.The static stiffness model of robot joints and arms is concluded by considering not only the joints deformation which mainly considering the deformations of servo motor and harmonic reducer,but also the arm deformation which includes bending,twisting and stretching deformation.Then,based on the stiffness model, the total end deformation of robot is concluded by analyzing the mapping relations between the deformation of joints and arms and the end deformation of robot.Finally,based on the stiffness model of the robot,the Matlab analysis software is used to analyze the example,and the results are compared with the results of finite element analysis.It can be used to guide the design and motion control of lightweight robots.
lightweight serial robot;static stiffness model;joint deformation;arm deformation;finite element analysis
TP24
A
1007-2373(2017)03-0029-06
10.14081/j.cnki.hgdxb.2017.03.006
2017-02-24
河北省自然科學基金(E2014202114)
高曉飛(1989-),男,碩士研究生,413179162@qq.com.通訊作者:李春書(1962-),女,教授.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
