基于改進模糊PID的導彈飛行軌跡誤差修正反饋控制
2017-07-15 13:17:02王軍
智能計算機與應用 2017年3期
關鍵詞:控制
王軍
摘要:導彈飛行中在受到外部干擾磁場和反導技術作用下,容易出現飛行軌跡誤差,需要進行誤差修正。提出一種基于改進模糊PID的導彈飛行軌跡誤差修正反饋控制算法,進行導彈飛行軌跡誤差修正的控制約束參量分析和被控對象模型構建.構建導彈在俯仰、偏航和回旋三個縱向運動通道的彈道方程,進行彈道飛行動力學分析。采用三層前向神經元網絡結構進行飛行軌跡的姿態信息融合,采用Kalman濾波方法進行飛行狀態變量和軌跡誤差協方差估計,結合模糊PID控制方法實現導彈自適應反饋控制。仿真結果表明,采用該方法進行導彈飛行軌跡誤差修正和反饋控制,導彈的定姿精度較高,從而提高了導彈的反導和突防能力。
關鍵詞:模糊PID神經網絡;導彈;飛行;控制;Kalman濾波
0引言
導彈是依靠自身動力裝置推進,采用自主導航控制系統引導彈體進行目標跟蹤、自動識別和摧毀打擊的精確制導武器。導彈作為現代戰爭的主要武器,具有射程遠、速度快、精度高、威力大等特點。導彈的控制制導方式很多,常見的有雷達制導、紅外線制導、雷射制導等。導彈在攻擊飛行過程中,容易受到對方的電磁輻射場以及其它反導裝置的干擾,出現飛行軌跡誤差,從而影響打擊精度,甚至被攔截,需要對導彈的飛行軌跡誤差進行及時自適應修正,實現誤差反饋修正控制,提高導彈的準確打擊能力。研究導彈的優化控制方法,在提高彈道自動駕駛儀控制系統的穩定性以及導彈的反導能力方面同樣具有重要意義,相關的控制算法研究受到人們的極大關注。
彈道的飛行軌跡修正和控制建立在對導彈姿態信息的準確可靠測量和定姿的基礎上,采用慣性航向姿態系統和自動駕駛儀控制系統,執行控制指令,操縱導彈完成相關的飛行導引操作。在此,導彈的控制系統是整個導彈的核心,控制算法的優化設計是基礎。傳統方法中,對導彈的制導控制算法主要有三軸導引方法、卡爾曼濾波方法、模糊控制方法和神經網絡控制方法等,通過姿態測量和信息融合,結合相關的導引控制律實現對導彈的狀態修正和姿態調整,提高了導彈飛行的穩定性,取得了一定的研究成果,其中,文獻中提出一種基于Terminal滑模面下標準能量梯度修正的最陡下滑軌跡中導彈的航向校正控制模型,采用標準能量梯度方法進行控制律設計,結合Kalman姿態融合濾波進行位姿的線性跟蹤,并作用在導彈的自動駕駛儀系統中,提高了導引精度,但該控制算法計算開銷較大,控制反饋的實時性不好;文獻中提出一種應用Lvapunove反演技術設計的參數自適應非線性跟蹤控制器,在反演鎮定函數中引入了積分項,實現導彈縱向非線性動力系統自適應反演積分控制,在大擾動條件下避免了導彈的動力系數和位姿定姿的劇烈變化,但該方法在受到外部干擾磁場時,容易出現穩態跟蹤誤差,導彈自動駕駛儀控制的全局穩定性不好。
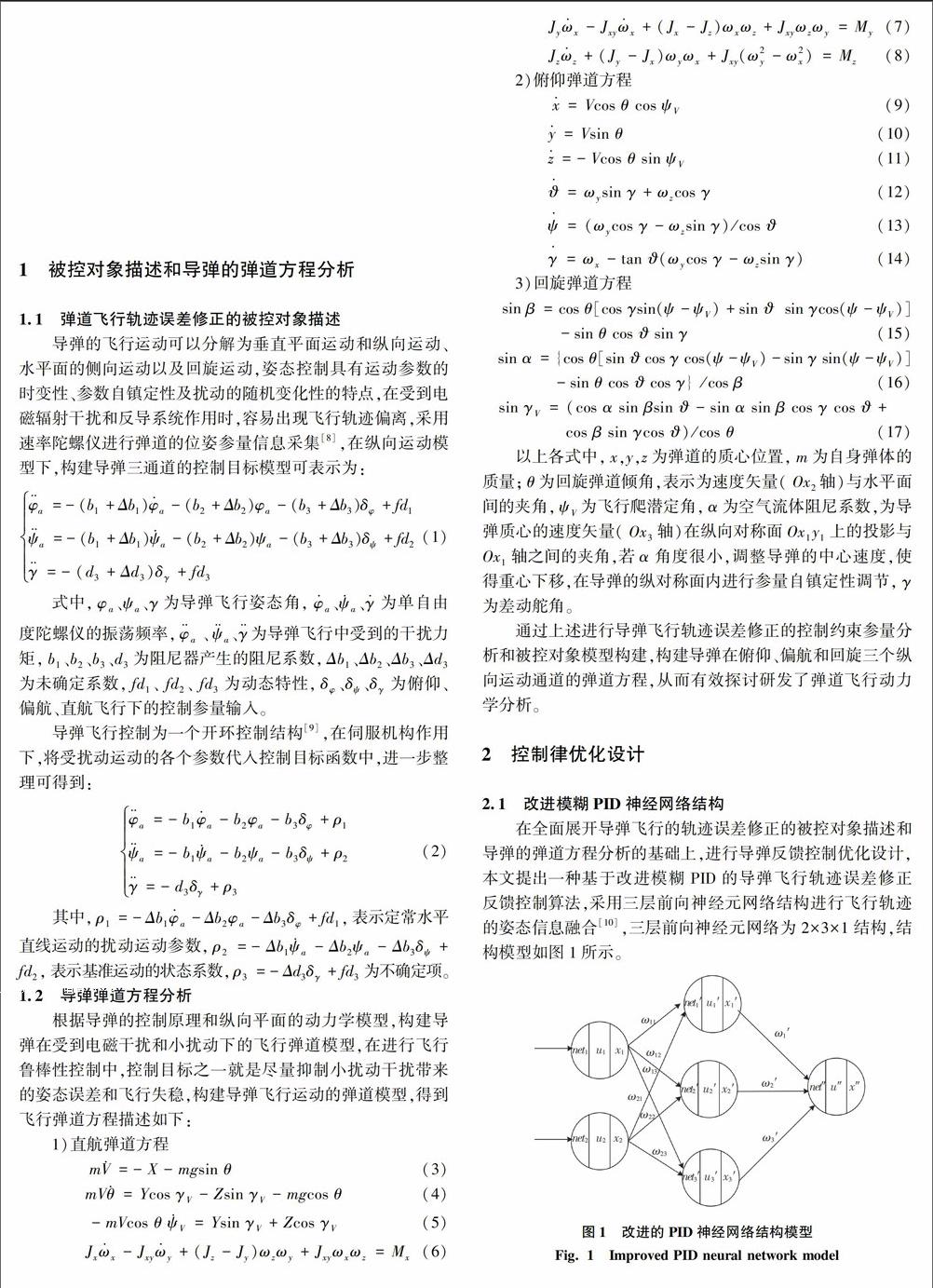
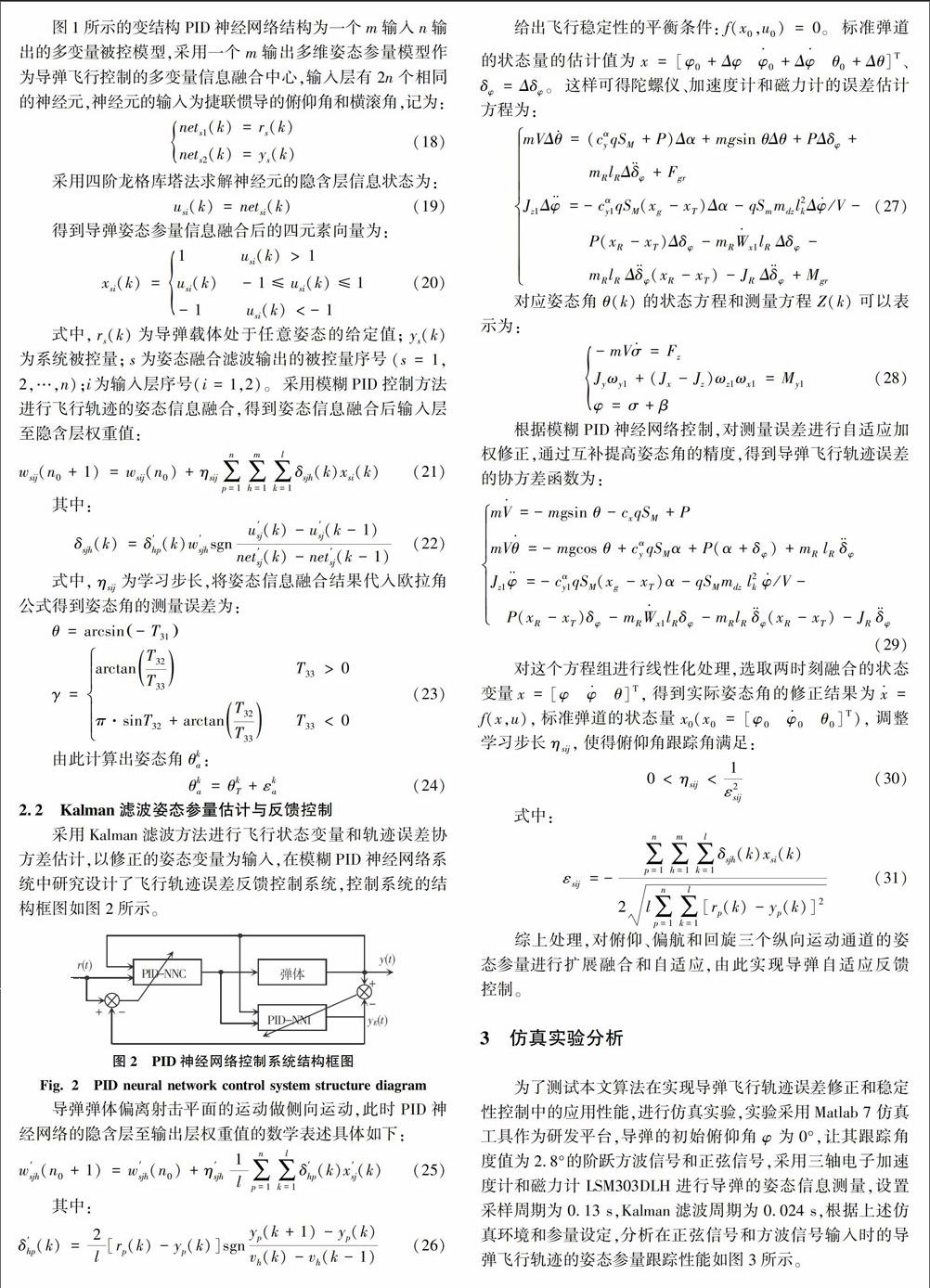
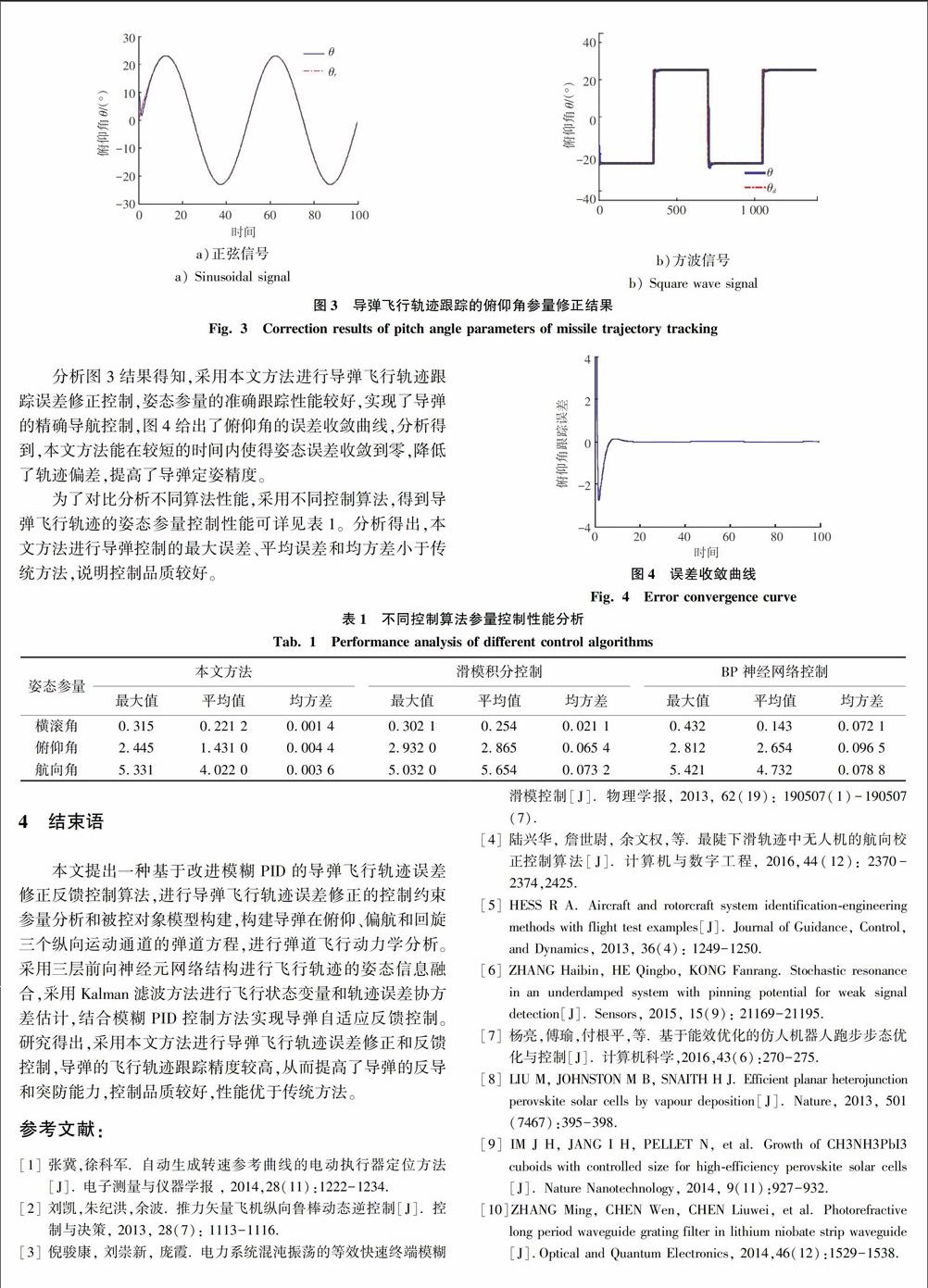
對此,本文提出一種基于改進模糊PID的導彈飛行軌跡誤差修正反饋控制算法,首先進行導彈飛行軌跡誤差修正的控制約束參量分析和被控對象模型構建,構建導彈在俯仰、偏航和回旋三個縱向運動通道的彈道方程,進行彈道飛行動力學分析。然后采用三層前向神經元網絡結構進行飛行軌跡的姿態信息融合,采用Kalman濾波方法研究展開飛行狀態變量和軌跡誤差協方差估計,結合模糊PID控制方法實現導彈自適應反饋控制。最后進行方程實驗分析,結果表明,本次研究提供了有益進展,并可得出有效性結論。
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
