后向預測高斯混合概率假設密度濾波算法
2017-07-12 17:47:34胡建旺
探測與控制學報 2017年3期
趙 凱,胡建旺,吉 兵
(解放軍軍械工程學院,河北 石家莊 050003)
后向預測高斯混合概率假設密度濾波算法
趙 凱,胡建旺,吉 兵
(解放軍軍械工程學院,河北 石家莊 050003)
針對單步延遲無序量測條件下多目標跟蹤中,概率假設密度濾波對目標數量與狀態估計誤差偏大問題,提出了后向預測高斯混合概率假設密度濾波算法(BP-GMPHD)。該算法在后向預測框架內,以高斯混合概率假設密度濾波器為基礎濾波算法,計算各高斯分量的回溯狀態并進行再更新,經剪枝與合并等步驟獲得最終的目標數量與狀態估計。仿真驗證表明,該算法在無序量測條件下保持了良好的濾波性能,能夠準確估計多目標數目和狀態。
多目標跟蹤;無序量測;單步延遲;高斯混合;后向預測
0 引言
2003年,Mahler[1]提出了基于隨機有限集(Random Finite Sets, RFS)的概率假設密度(Probability Hypothesis Density, PHD)濾波,以實現對多目標的跟蹤,即將目標的狀態和觀測看作隨機有限集,傳遞多目標全局后驗概率密度的一階統計矩,最終獲得多目標數量與狀態估計。該方法可以繞過復雜的數據關聯問題,適用于目標數量時變或未知的情形[2-3]。
目前,對于PHD的近似實現方法有兩種:序貫蒙特卡羅(Sequential Monte Carlo, SMC)方法與高斯混合(Gaussian Mixture, GM)方法[4-5]。由于高斯混合方法的計算量相對較小且精度較高,因此其被廣泛應用于求解PHD中。
在跟蹤過程中,傳感器量測或因隨機的通信延遲出現無序現象,即來自同一目標的較早時刻量測在較晚時刻量測之后到達融合中心[6]。Hilton[7]將這些量測命名為無序量測(Out-of-sequence Measurement, OOSM),并針對線性高斯系統中單目標跟蹤問題,在后向預測框架內提出了適用于單步延遲OOSM的B1算法,可有效降低OOSM的影響。而在多目標跟蹤中,標準的PHD濾波算法無法直接處理此類“負時間更新”問題,需進行改進。
針對上述問題,提出了后向預測高斯混合概率假設密度濾波(BP-GMPHD)算法。
1 RFS與PHD濾波原理

tk時刻的多目標狀態模型可用RFS描述為[9]:
(1)
式中,Xk-1為tk-1時刻的目標狀態RFS;Sk|k-1表示從tk-1到k時刻存活目標狀態RFS;Bk|k-1為tk-1到k時刻由Xk-1衍生的目標狀態RFS;Γk為tk時刻新生目標狀態RFS。
k時刻目標量測模型用RFS描述為[9]:
(2)
式中,Ck為雜波與虛警量測RFS;Θk為Xk的量測RFS。
根據經典Bayes估計理論,基于RFS的多目標Bayes估計表示為:
(3)
(4)
式中,pk|k-1與pk為多目標先驗、后驗概率;fk|k-1為狀態轉移概率;gk為量測似然函數;μ為某一空間近似勒貝格測度。

(5)
PHD可濾波器主要通過預測過程與更新過程來實現遞推,其預測PHD可表示為:
(6)
式中,bk|k-1為存在目標所衍生的目標PHD;γk(xk)為新生目標的PHD;f(xk|xk-1)為狀態轉移概率密度。
更新PHD可表示為:
(7)
2 多目標OOSM問題描述
假定目標i的狀態方程與量測方程為:
(8)
(9)
如圖1所示,假設tk時刻,已有目標i的狀態估計與誤差協方差矩陣:
(10)
隨后,來自t=td時刻的量測
(11)
3 基于后向預測的BP-GMPHD濾波算法
3.1GMPHD多目標濾波算法
文獻[11]給出了GMPHD濾波器具有強L1一致收斂性質的證明。因此,高斯混合方法的引入,可避免PHD濾波問題中的復雜的積分運算。另外,應用GMPHD濾波算法時,除PHD濾波器常用假設之外,還需要滿足:
1)單目標的馬爾科夫轉移密度和似然函數都是線性高斯的;
2)目標的存活概率PS為常數;檢測概率PD為常數;
3)目標新生和衍生過程的PHD都是高斯混合形式;

(12)
式中,Jk-1為高斯混合分量個數。
3.1.1 預測步
tk時刻預測強度為:
Dk|k-1(x)=γk(x)+Ds,k|k-1(x)+Db,k|k-1(x)
(13)
式中,γk(x)、Ds,k|k-1(x)與Db,k|k-1(x)分別表示新生目標密度、存活目標和衍生目標的PHD,即
(14)
(15)
(16)
各分量具體形式可表示為:
更進一步地,預測步PHD可表示為:
(17)
式中,Jk|k-1=Jb,k|k-1+Jγ,k+Jk-1。
3.1.2 更新步
經過更新,tk時刻后驗強度為:
(18)
(19)
3.2 后向預測濾波過程
Hilton提出的后向預測法,可解決卡爾曼濾波算法體系下單步延遲OOSM。其基本思想是:當系統接收到OOSM時,計算OOSM發生時刻的回溯狀態與協方差矩陣等,再利用滯后到達的量測對最新時刻狀態估計與協方差進行更新,可在過程噪聲連續離散化模型(Discrete Continuous-time Model, DCM)條件下達到最優。具體過程如圖2中步驟①②所示。這一過程還可表述為:
(20)
卡爾曼濾波體系下后向預測的算法具體過程如下[12]:
tk到td時刻的回溯狀態為:
(21)
回溯相關的協方差矩陣為:
(22)
(23)
(24)
回溯量測值協方差為:
(25)
tk時刻的狀態和量測值之間的協方差:
(26)
濾波增益為:
改革開放后,我國農村社會結構發生了變遷:人口老齡化、村莊空心化、鄰里關系冷漠化。歷史遺留問題、自然災害、勞動力外流、生產生活方式突變等都容易造成農村社會的不穩定性。怎樣帶動鄰里交往、增強村民凝聚力?建筑師從不同的角度切入,提供了多種可行之路。
(27)
含zd的最新時刻狀態估計為:
(28)
最新時刻狀態估計協方差矩陣為:
(29)
3.3BP-GMPHD濾波算法
為解決線性系統無序量測條件下的GMPHD濾波問題,提出后向預測BP-GMPHD濾波算法。 將最新時刻每一個高斯分量納入后向預測框架內,計算OOSM發生時刻的回溯狀態,并利用滯后到達的量測對其進行更新,最終通過剪枝與合并、狀態提取等步驟得到更新后的狀態估計與目標數量。圖3給出了算法流程圖。



另外設定門限Tmerg,當兩個分量合并距離小于此門限時,將會合并成單個分量。經過此步,得到Jk個高斯分量。
4 仿真驗證
以二維平面內多目標運動情形為例,通過仿真實驗綜合驗證BP-GMPHD算法在無序條件下的跟蹤性能,并忽略OOSM的處理方式,即丟棄滯后量測法與真實值做對比,以驗證算法的有效性。
4.1 參數設置
假設目標的監測區域為[-100 m,100 m]×[-100 m,100 m]的二維平面,對應的目標狀態方程為
(30)
空間中有4個目標在運動,相繼出現或消失。傳感器對4個目標進行觀測,得到的量測為其位置的二維坐標。假設每次掃描的雜波數服從泊松分布,且該過程中忽略衍生目標出現,則傳感器量測方程可表示為
(31)

4.2 仿真一
在跟蹤過程的前10s,傳感器獲得10個量測。假設出現OOSM,融合中心最終收到的量測序列如表1所示。

表1 單步延遲無序量測時序表
首先對該量測序列應用GMPHD-A1算法。圖4為OOSM產生時刻的回溯狀態集與正常時序下該時刻的狀態集對比。由于算法假設回溯到OOSM產生時刻的高斯分量數量與最新時刻相同,故回溯狀態集中元素數量要遠少于正常時序處理的情形。圖5為更新后的最新時刻狀態集進行剪枝與合并前后對比,經過此步驟后高斯分量數大幅減少。
再用丟棄滯后量測法對表1所示量測進行處理,將兩種算法在t=6與t=9時刻的位置分量均方根誤差(RMSE)及目標數量與真實值作比較,結果如表2、表3所示。表中括號內數值是該指標相對于真實值的誤差,誤差越小,跟蹤精度越高。可以看出,BP-GMPHD的RMSE遠低于丟棄滯后量測法,即跟蹤精度較高;且丟棄滯后量測法在目標數量估計上出現了偏差,此項的RMSE數值忽略了誤差較大的目標。隨著濾波過程的進行,OOSM的影響下降,丟棄滯后量測法與BP-GMPHD精度的差距減小,這也符合文獻[9]的相關結論。
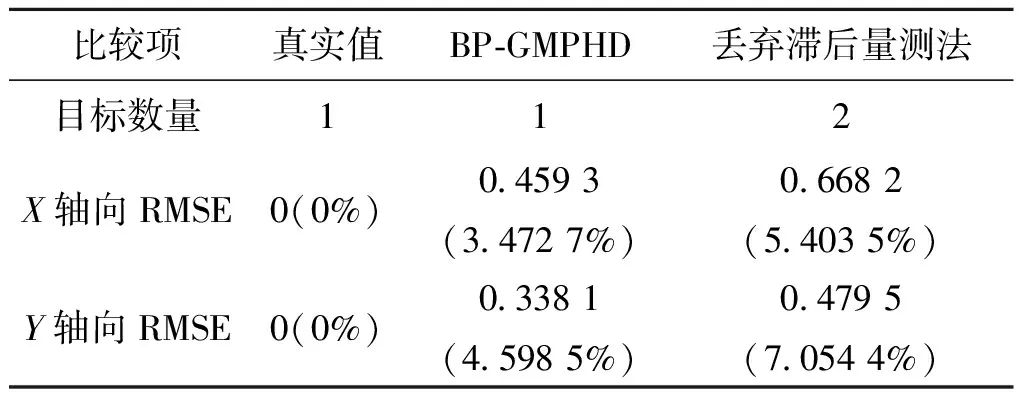
表2 t=6時刻結果

表3 t=9時刻結果
4.3 仿真二
現將跟蹤時間延長至35 s,即融合中心收到35個量測。假設每7個量測中包含一個單步延遲的OOSM。分別使用BP-GMPHD算法與丟棄滯后量測法處理上述量測,將濾波結果與目標真實運動軌跡、數量做比較,結果如圖6、圖7所示。
圖6表示多目標真實航跡與不同算法狀態估計的對比。由圖中可以看出,盡管多目標的量測數據中含有多個OOSM,但在使用BP-GMPHD算法濾波后,這些OOSM被應用到了狀態更新中,得到的多目標的狀態估計量可以很好地跟蹤目標的真實運動狀態,表明了該算法的有效性 。
圖7給出了在不同時刻量測數據經過BP-GMPHD算法處理得到的目標數量與丟棄滯后量測法及真實值的對比,算法對目標數目的估計基本接近真實值,優于丟棄滯后量測法,目標的數目估計更加準確。
5 結論
本文提出了BP-GMPHD濾波算法。該算法在后向預測框架內,以高斯混合概率假設密度濾波器為基礎濾波算法,計算各高斯分量的回溯狀態并進行再更新,經剪枝與合并等步驟獲得最終的目標數量與狀態估計。仿真結果表明, BP-GMPHD算法在無序量測條件下保持了良好的濾波性能,具有廣泛的應用價值。
需要注意的是,本文只能對單步延遲OOSM進行處理;當延遲步數多于一步時,對于回溯高斯分量的預測誤差偏大,導致整體濾波結果與真實值有較大差距。因此,如何將應用范圍推廣至多步延遲OOSM,還需要進一步研究。
[1]Mahler R P S. Multitarget Bayes Filtering via First-Order Multitarget Moments [J]. IEEE Transactions on Aerospace & Electronic Systems Aes, 2003, 39(4):1152-1178.
[2]郝燕玲,孟凡彬,周衛東,等. 多目標跟蹤的高斯混合概率假設密度濾波算法[J]. 彈箭與制導學報,2010,30(3):35-40.
[3]孔云波,馮新喜,危璋.利用高斯混合概率假設密度濾波器對擴展目標量測集進行劃分[J]. 西安交通大學報,2015(7):126-133.
[4]Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multi-target filtering with random finite sets[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4): 1224-1245.
[5]Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter[J].IEEE Transactions on Signal Processing,2006,54(11):4091-4104.
[6]王煒,黃心漢,王敏.無序量測濾波更新算法綜述[J].控制與決策,2012,27(1): 1-5.
[7]Hilton R D, Martin D A, Blair W D. Tracking with time-delayed data in multisensor systems[J]. 1993.
[8]占榮輝. 非線性濾波理論與目標跟蹤應用[M]. 北京:國防工業出版社, 2013.
[9]Orton M, Marrs A. Particle filters for tracking with out of-sequence measurements[J]. IEEE Trans on Aerospace and Electronic Systems, 2005, 41(2): 673-702.
[10]馬勒. 多源多目標統計信息融合[M]. 北京:國防工業出版社, 2013.
[11]Daniel Clark, Ba-Ngu Vo. Convergence Analysis of the Gaussian Mixture PHD Filter[J].IEEE Transactions on Signal Processing,2007,55(4):1204-1212.
[12]陳金廣. 目標跟蹤系統中的濾波方法[M]. 西安:西安電子科技大學出版社, 2013.
BP-GMPHD Filter Algorithm with Single-step-lag Out-of-sequence Measurement
ZHAO Kai, HU Jianwang, JI Bing
(Ordnance Engineering College of PLA, Shijiazhuang 050003, China)
In multi-target tracking process with one-step-lag out-of-sequence measurement (OOSM), probability hypothesis density may cause low estimation precision for target number and state. To solve the problem, a backward prediction Gaussian mixture probability hypothesis density (BP-GMPHD) filtering was proposed. Within the backward prediction framework, taking Gaussian mixture probability hypothesis density as basis filtering algorithm, backtrack state of each Gaussian component was calculated to obtain target number and state estimation after pruning and merging,etc. Simulation results showed that the proposed algorithm could effectively keep a good filtering performance with OOSM and accurately estimated the multi-target number and state.
multi-target tracking; OOSM; one-step-lag; Gaussian mixture; backward prediction
2017-01-24
趙凱(1991—),男,山東濟南人,博士研究生,研究方向:指揮信息系統與安全技術。E-mail:609587194@qq.com。
TP391
A
1008-1194(2017)03-0118-06
