實驗教學SCARA機械臂控制算法研究與實現
2017-07-10 10:27:27姚曉通潘影麗
計算機應用與軟件 2017年6期
姚曉通 潘影麗 高 宇
(蘭州交通大學電子與信息工程學院 甘肅 蘭州 730070)
實驗教學SCARA機械臂控制算法研究與實現
姚曉通 潘影麗 高 宇
(蘭州交通大學電子與信息工程學院 甘肅 蘭州 730070)
針對實驗教學,設計一種開放式的SCARA教學機械臂,把對控制算法的研究作為教學重點。首次采用仿真設計和實物設計,作為示教的兩個主要部分。通過D-H參數法確定運動學方程,根據運動學方程對機械臂進行了正逆運動學分析,結合軌跡規劃完成機械臂運動規劃。MATLAB建立機械臂模型,通過仿真模型運動驗證了前期控制算法分析的準確性。利用Visual Studio 2013實現算法,完成上位機控制系統,通過上位機編程控制機械臂完成物體搬運工作。機械臂能夠精準地實現旋轉和搬運功能,并驗證了控制算法研究和仿真設計的正確性,能夠較好地達到實驗教學的需求。
SCARA MATLAB 仿真 軌跡規劃 運動控制
0 引 言
隨著科學技術水平的不斷提高,工業機器人(機械臂)已經大量地應用到生產生活中。機器人作為一個新興的技術,涉及到了多個領域、各個學科。隨著科技的發展,機器人技術也逐漸深入到教育領域。本文專門針對實驗教學機器人,而設計制造SCARA機械臂,作為實驗教學的研究模型。
MATLAB平臺下的Robotic-Tools工具是研究機械臂中應用最廣的仿真平臺。文獻[1]采用MATLAB介紹了機器人在實驗教學中的應用,文獻[2-3]采用了MATLAB和ADAMS聯合仿真平臺。文獻[4]運用OpenGL環境創建機械臂模型,ADAM、OpenGL都具有很好的三維模型,使仿真結果更直觀。本文通過MATLAB和實物機械臂聯合,采用PC+控制卡方法,通過Visual Studio 2013完成上位機控制,以真實的機械臂演示,能更好、直觀地驗證實驗結果的真實性。
1 機械臂的模型設計
SCARA機械臂,包括三個旋轉關節和一個移動關節。SCARA機械臂定位精度高、運動速度快,適合于平面定位和垂直方向的裝配作業。SCARA型機械臂的三維模型如圖1所示。
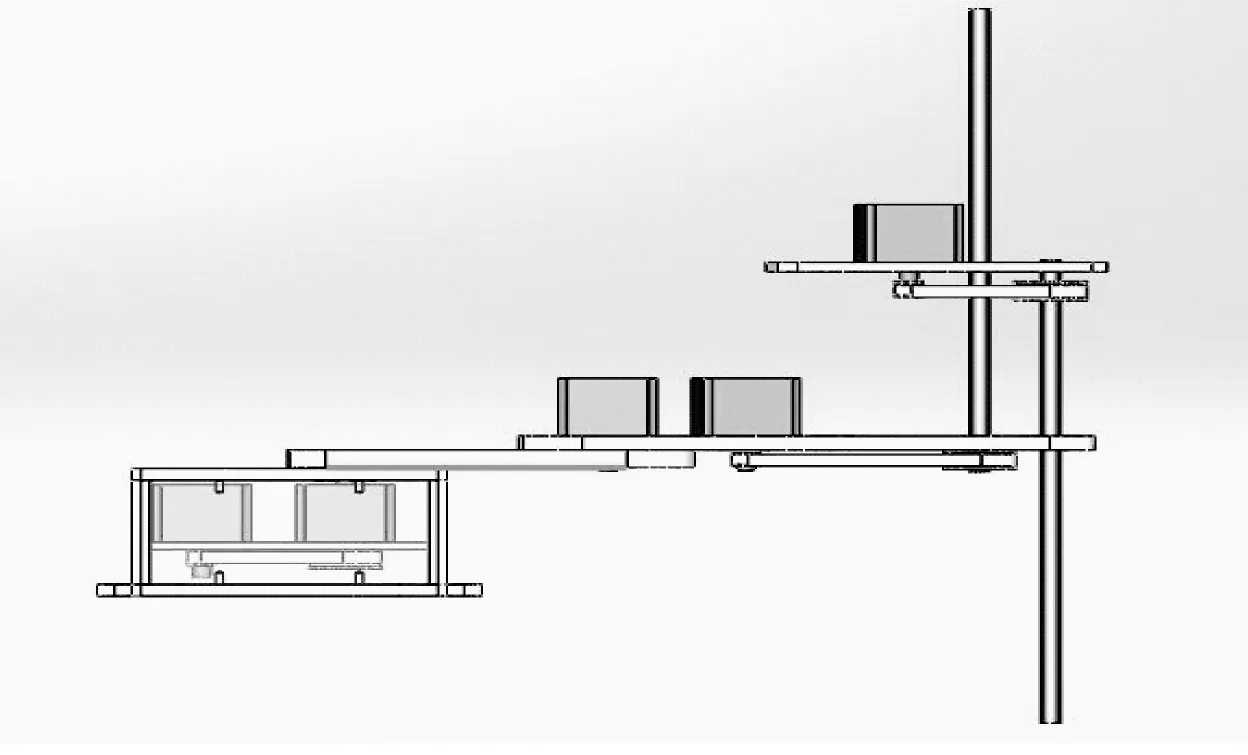
圖1 SCARA機械臂結構圖
對圖1的機械臂,建立連桿坐標系如圖2所示。每個連桿都可以通過用于描述連桿本身和用于描述連桿之間的連接關系的運動學參數描述[5],其分別為:單根連桿參數:ai(連桿長度)、αi(連桿扭腳);相鄰連桿之間的參數:di(連桿距離)、θi(連桿轉角)。
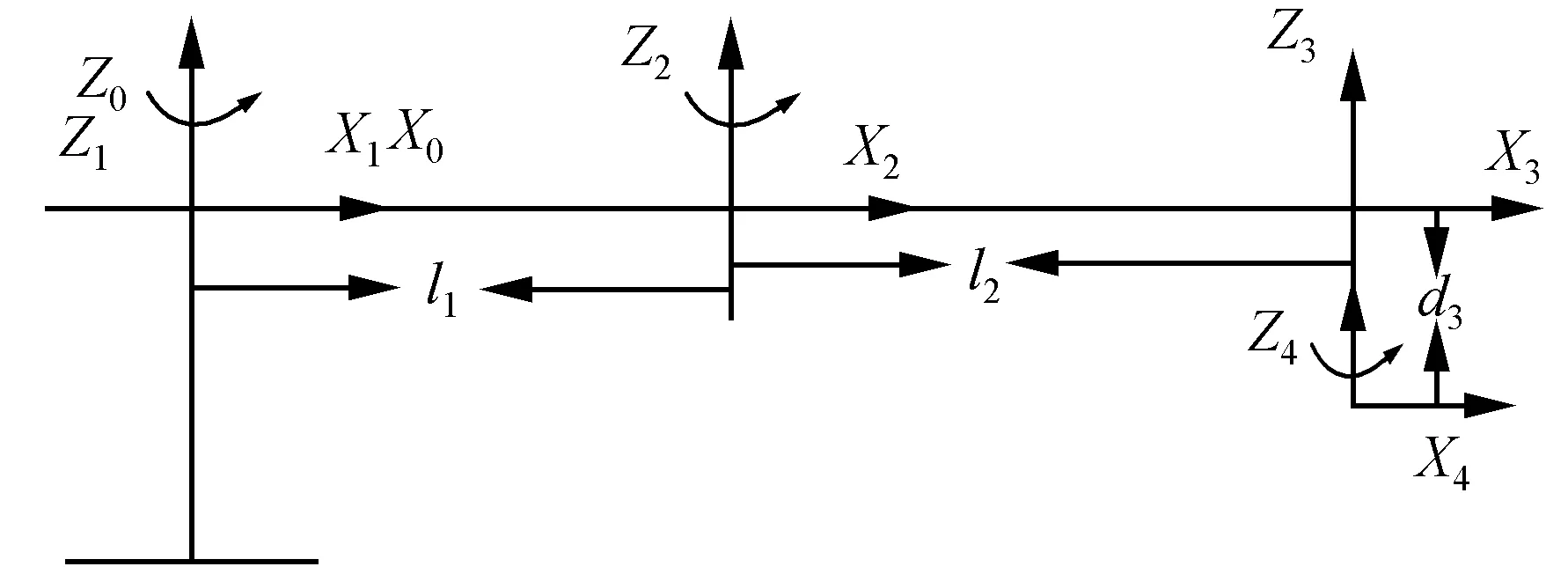
圖2 D-H法建立的坐標系
根據圖2坐標系可得出D-H參數,如表1所示。
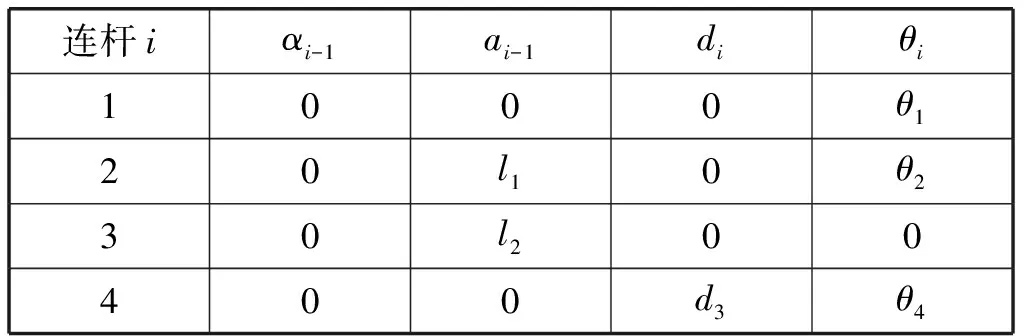
表1 D-H參數表
2 機械臂的控制算法
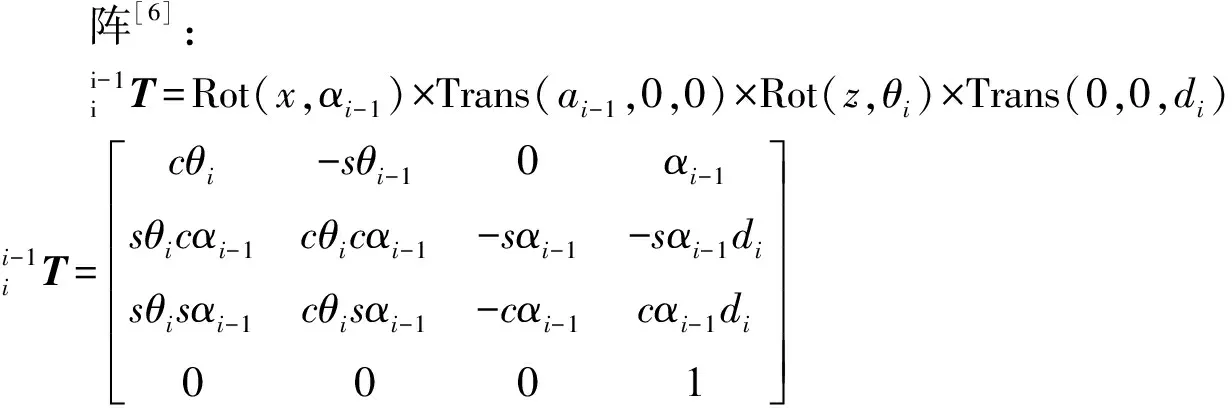
實現機械臂控制算法的整個過程是根據D-H法建立的坐標系寫出變換矩陣,根據變換矩陣寫出每個坐標系相對于基坐標系的齊次變換矩陣;再根據每個坐標系的齊次矩陣求出正、逆解,同時根據一定的任務尋求一條連接起點到終點的最優或次優有效路徑。
2.1 正運動學分析
(1)
(2)
因此,對于本文SCARA教學機械臂,i=4時,確定末端執行器坐標系相當于基坐標系的變換矩陣為:
通過各連桿變換矩陣相乘,可以得到SCARA機械臂末端執行的位姿方程:
(4)
通過式(4)得到末端位置矩陣:[pxpypz]T,
(5)
(6)
(7)
(8)
2.2 逆運動學分析
逆運動學的求解是指機械臂的末端執行器的笛卡爾空間到各個關節空間的映射關系。逆解求解比正解復雜,需要考慮解的存在性、多重解等問題[7]。
(9)
對式(9)兩邊乘上0T1的逆矩陣,并根據矩陣兩邊對應元素相等求解各個關節變量。
1) 求關節變量θ1為了分離變量,方程的兩邊同時左乘0T1(θ1),得:
0T1-1·0T4=1T22T33T4
(10)
即:
根據式(10)矩陣對應元素相等的:
L(1,4)=R(1,4):px·cosθ1+py·sinθ1=cosθ2·l2+l1
(11)L(2,4)=R(2,4):-px·sinθ1+py·cosθ1=sinθ2·l2
(12)
根據式(11)得:
2) 求關節變量θ2,根據式(12)得:
(13)
3) 求關節變量d3,根據左右兩邊第三行第四列對應元素相等得:
L(3,4)=R(3,4):d3=-pz
(14)
4) 求關節變量θ4,根據矩陣左右兩邊對應元素相等得:
L(1,1)=R(1,1):
nx.cosθ1+nysinθ1=cosθ2·cosθ4-sinθ2·sinθ4
(15)
L(2,1)=R(2,1):nx·-sinθ1+ny·cosθ1=sinθ2·cosθ4-cosθ2·sinθ4
(16)
根據式(15)、式(16)得:
(17)
2.3 軌跡規劃
軌跡是指每個自由度的位置、速度和加速度的時間歷程[8]。軌跡規劃就是規劃出具有平滑性和連續型的軌跡,從而保證實際工作中的機械臂在運動過程保持平穩無沖擊。本文以關節空間規劃對機械臂軌跡進行仿真并通過真實機械臂進行驗證。

θ(t)=a0+a1t+a2t2+a3t3
(18)
(19)
(20)
把四個約束條件代入式(18)-式(20)中可以得到含有四個未知量的四個方程:
θ0=a0
(21)
(22)
0=a1
(23)
(24)
解方程可以得到:
a0=θ0
(25)
a1=0
(26)
(27)
(28)
通過式(25)-式(28)可以求出從任何起始關節角位置到期望終止位置的三次多項式。
3 仿真設計
利用MATLAB平臺的機器人工具箱——Robotics Toolbox[9],采用改進D-H建模方法,改進的D-H建模方法可有效的彌補標準D-H建模與實物的偏差[10]。建立機械手運動學模型,代碼如下:
L1=link([0 0 0 0 0],′modified′);
L2=link([0 95 0 0 0],′modified′);
L3=link([0 100 0 0 1],′modified′);
L4=link([0 0 0 -40 0],′modified′);
r = robot({L1 L2 L3 L4});
r.name = ′SCARA′;
drivebot(r);
仿真結果如圖3所示。
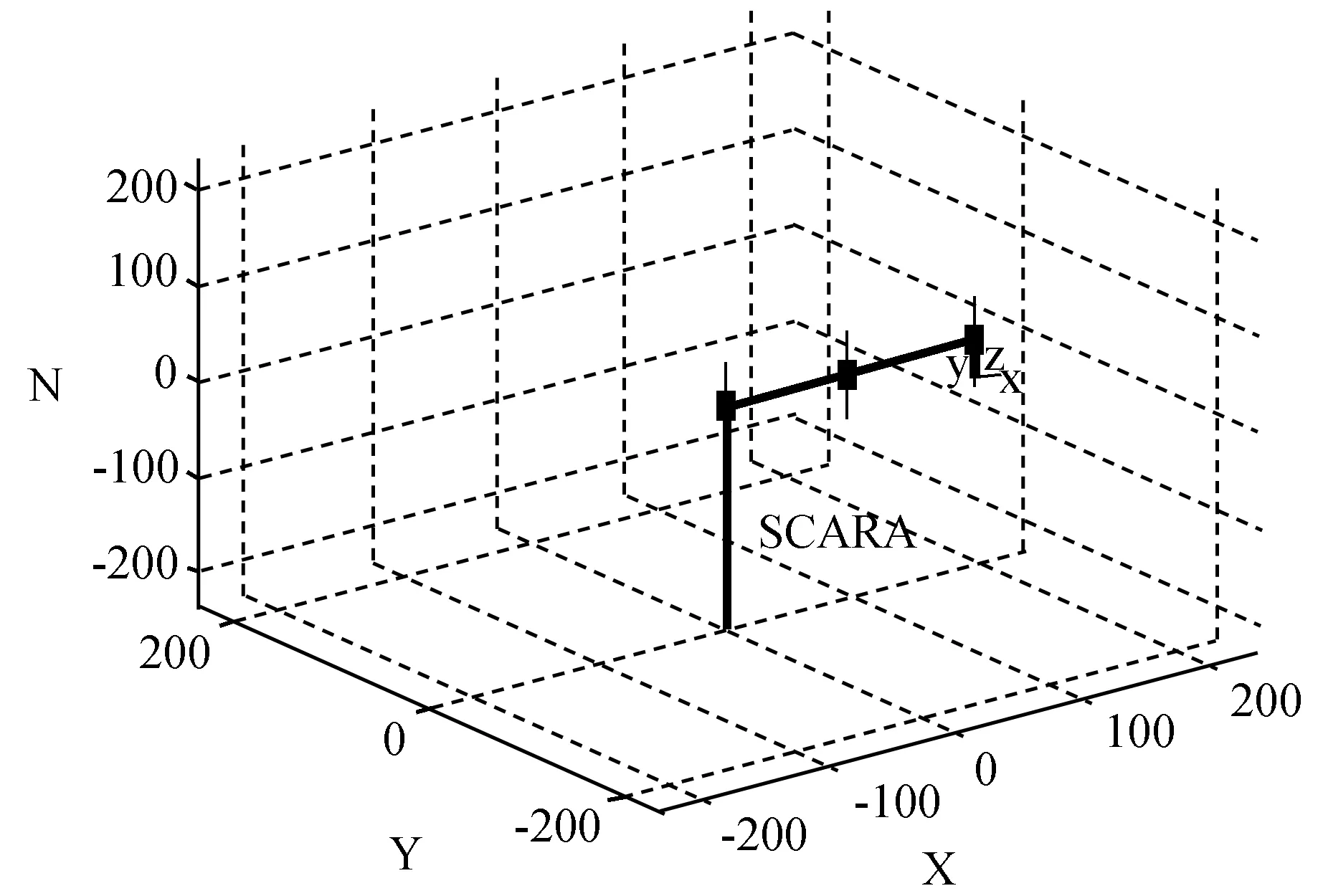
圖3 SCARA機械臂模型圖
根據上面軌跡規劃計算,應用MATLAB仿真[11],設置其由qa=[-0.000 062 0.000 178 0.000 000 -0.000 117]運動到qb=[-0.522 315 1.504 080 0.000 000 -0.981 765]。設置時間向量t=[0∶0.015∶1],可以觀察各個關節的運動情況如圖4-圖6所示。
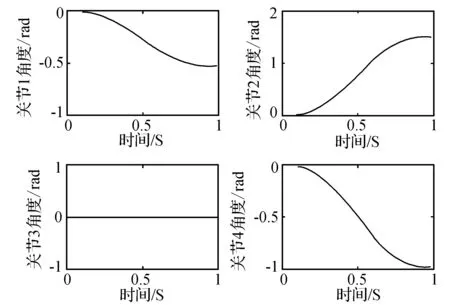
圖4 關節角度與時間的關系
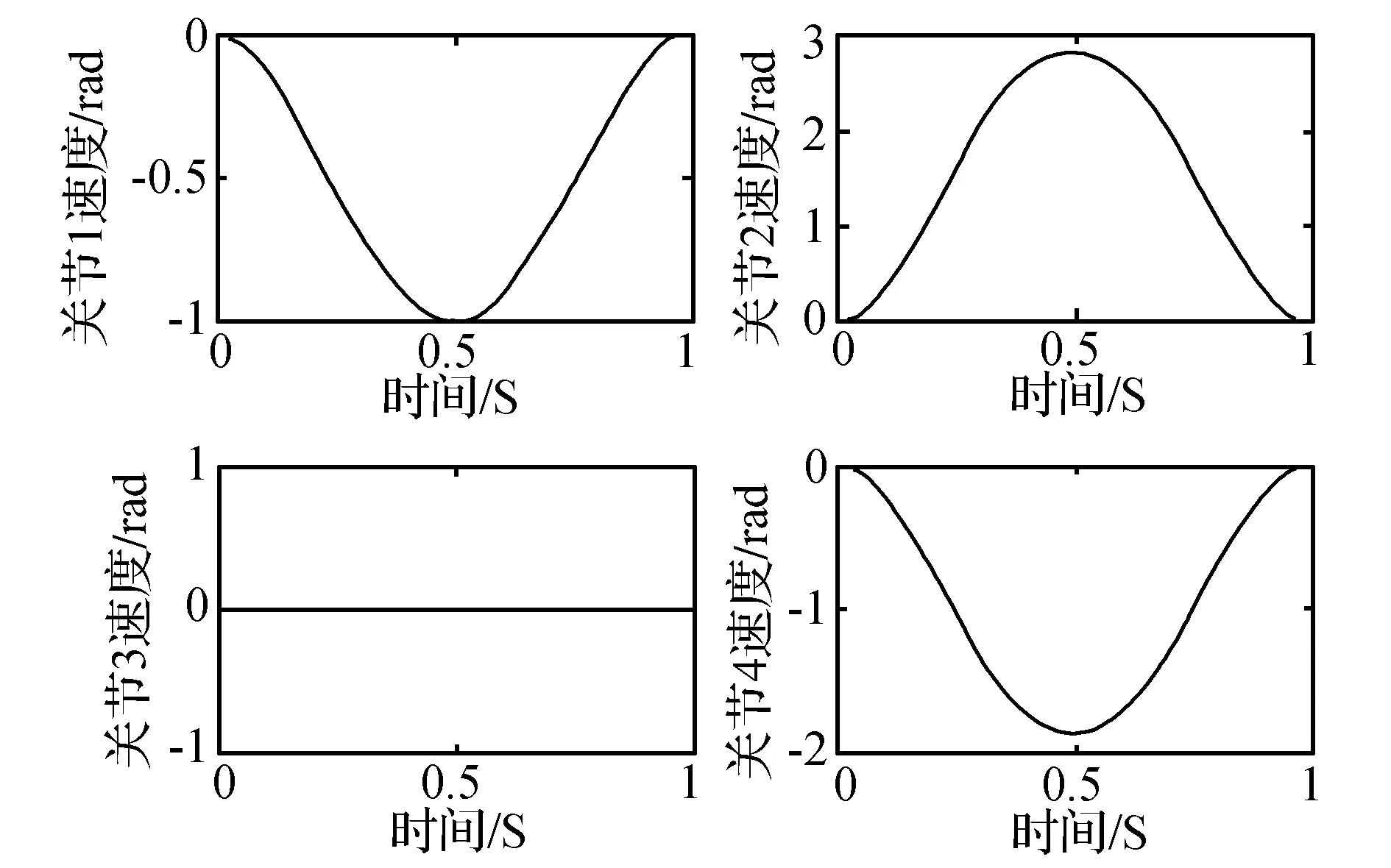
圖5 關節速度與時間的關系
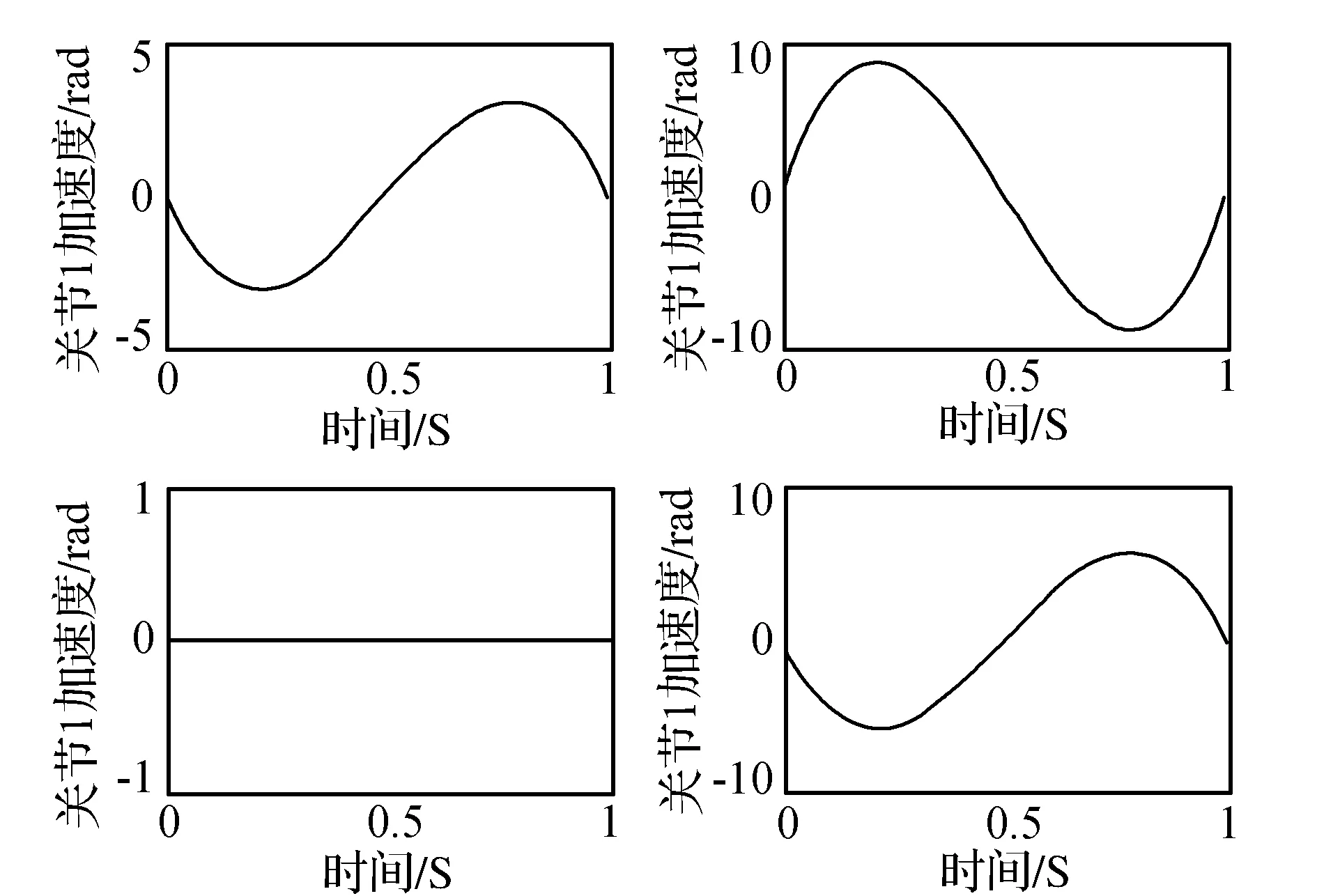
圖6 關節加速度與時間的關系
通過以上仿真結果,觀察每個關節的運動。通過觀察機械臂從qa運動qb過程中各個關節角度、速度、加速度隨時間的變化仿真結果,可以確定各連桿沒有運動錯位的情況,并且各個關節可以平穩地由起點運動到終點,從而確定規劃可以滿足運動要求。
4 機械臂實物設計
本文采用PC+控制卡方法,PC機完成運動規劃任務,運動控制卡完成運動控制功能,其成本較低,適合研究討論,驗證理論結果。
4.1 SCARA機械臂控制系統的組成
SCARA四自由度機械臂控制系統由工業機械臂、控制箱、計算機組成。由于平面機械臂主要實現速度快、精度高等特性,因此采用基于FPGA實現的多路步進電機控制[12]。FPGA擁有豐富的內部資源和大量的IP核,具有速度快、精度高、指令并行執行、硬件擴展方便等優點。實物如圖7、圖8所示。
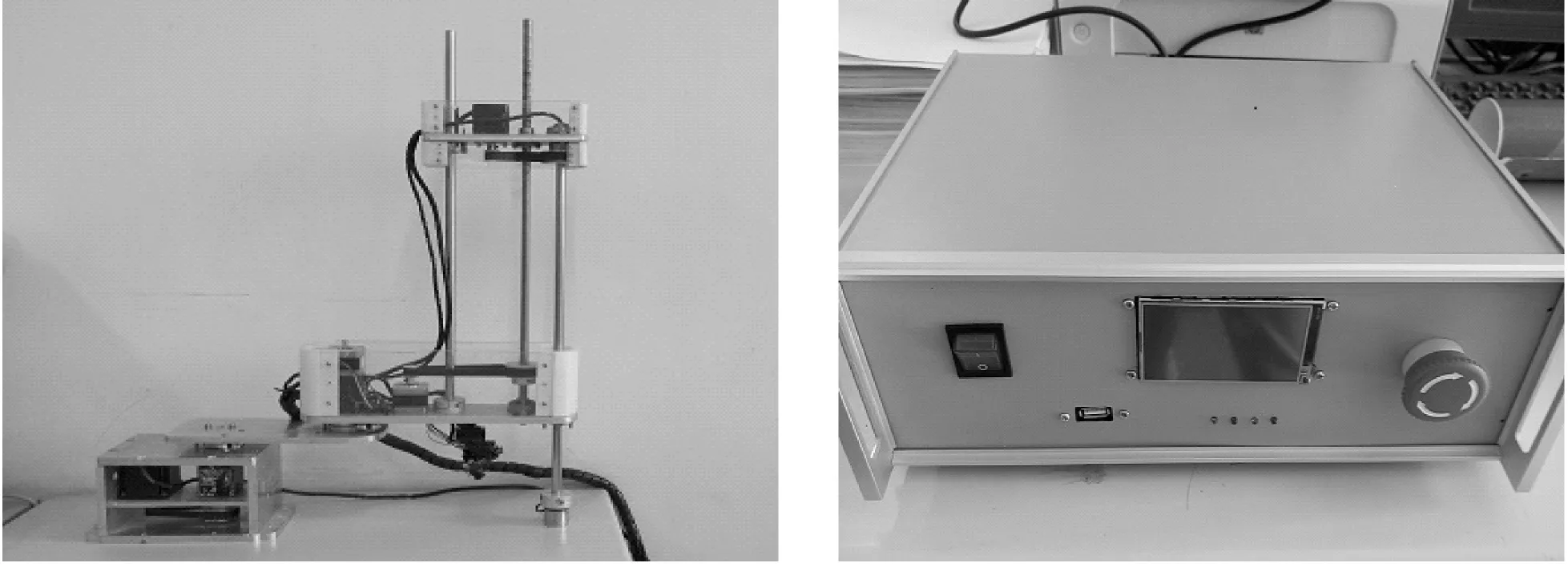
圖7 機械臂實物圖 圖8 控制箱實物圖
4.2 控制系統的軟件設計
本文設計了基于PC機USB總線的運動控制器,該控制器可以同時控制多個步進電機。開發了一套基于Windows具有交互式界面及開放式結構的控制軟件,該控制軟件利用Visual Studio 2013并且通過動態鏈接庫編寫運動控制函數,可以直接對硬件接口進行訪問,便于底層訪問控制。四自由度機械臂控制界面分為參數設置模塊、正運動學分析模塊、逆運動學分析模塊,運動控制模塊、結果顯示模塊。
如圖9所示上位機部分界面控制,包含對設備的打開,讓設備處于開始工作狀態;機械臂參數的設置,包含機械各個臂的長度。正運動學仿真,輸入兩點參數后,會把運動停止后的關節參數顯示出來。逆運動學仿真,當在末端抓持器的位姿編輯框中輸入位置時,關節角編輯框中會顯示對應角度的變化。另外為了更好實現對機械臂運動控制設置了控制末端按鈕,控制其對物體的“拿起”和“放下”,對突發事件發生設置“急停”。對機械臂的運動的次數設置,并可以隨時控制其“暫停”“開始”。下半部分界面主要是實現運動結果顯示,對機械臂運動的一下微調控制,可以設置機械臂的運動的方向,對每個軸分開控制。

圖9 界面整體圖
實驗測試結果:運行后設備打開,調用相應函數設置機械臂參數和機械臂算法參數,在測試時,起始點和終止點的關節角速度、加速度都默認設為零。上位機界面給出機械臂運動軌跡,實物機械臂可以到達預設的位置點并完成搬運動作。結果如圖10所示。

圖10 運行結果圖
算法實現如下:
1) 正解過程:
輸入參數:r_theta_move關節坐標(θ1,θ2,d3,θ4);
輸出參數:p_clamp_point機械臂夾具坐標。
bool flag;
flag=bool robot_forward(Rotational_struct
r_theta_move,
HPosition *p_clamp_point_ptr)
If(flag==TRUE)
{計算出p_clamp_point坐標}
2) 反解過程
輸入參數:HPosition p_clamp_point機械臂夾具末端坐標;
輸出參數:float clamp_theta夾具姿態角度θ。
bool flag;
Rotational_struct left_theta_move;左臂關節坐標(θ1,θ2,d3,θ4);
bool left_workspace; 左臂反解是否成功
Rotational_struct right_theta_move;左臂關節坐標(θ1,θ2,d3,θ4);
bool right_workspace;左臂反解是否成功
flag=bool robot _inverse (p_clamp_point,
clamp_theta,
r_left_theta_move,
left_workspace,
r_right_theta_move,
right_workspace)
if(left_workspace==TRUE)
{解出r_left_theta_move左臂姿態時的關節角}
else
{由p_clamp_point、clamp_theta確定夾具姿態不在機械臂左臂工作空間}
if(right_workspace==TRUE)
{解出r_right_theta_move右臂姿態時的關節角}
else
{由p_clamp_point、clamp_theta確定夾具姿態不在機械臂右臂工作空間}
5 結 語
通過利用D-H參數法建立了SCARA機械臂的模型,對SCARA教學機械臂的整體設計規劃與實現,能較好地完成預計的控制目標,完成動作和達到控制要求。通過不斷地對機械臂的調試和與對硬件的修改,實現了靈活的控制平臺。同時運用各種運行信息的實時傳輸,再與上位機的聯合調試,能夠很好地完成對各個關節的精確定位、各項功能都能較好地實現,并且可以支持遙控功能。此實驗教學機械臂控制平臺的設計與研究,能很好地滿足教學實驗需求,便于學生自主的安裝和調試,不僅鞏固了學生的理論知識,而且學生的創新意識和動手能力得到很好的培養和提高。
[1] 謝斌,蔡自興.基于MATLAB Robotics Toolbox的機器人學仿真實驗教學[J].計算機教育,2010(19):140-143.
[2] 馬如奇,郝雙輝,鄭偉峰,等.基于MATLAB與ADAMS的機械臂聯合仿真研究[J].機械設計與制造,2010(4):93-95.
[3] 高東強,楊磊,韓昆,等.SCARA機械手的軌跡規劃及運動學分析[J].機械設計與制造,2015(1):269-272S.
[4] 宋西平,李國琴,羅陸鋒.基于OpenGL的五自由度機械臂的運動學仿真[J].機械設計與制造工程,2015,44(12):18-21.
[5] Craig J J.機器人學導論[M].機械工業出版社,2006.
[6] 潘磊,錢煒,張志艷,等.四自由度機械臂運動學分析及Matlab仿真[J].機械科學與技術,2013,32(3):421-425.
[7] 郭發勇,梅濤,趙江梅.D-H法建立連桿坐標系存在的問題及改進[J].中國機械工程,2014,25(20):2710-2714.
[8] 劉磊.SCARA型四自由度機械臂軌跡規劃算法的設計與實現[D].安徽:安徽工程大學,2013.
[9] Corke P I.A robotics toolbox for Matlab[J].IEEE Robotics and Automation Magazine,1996,3(1):24-32.
[10] 臧慶凱,春貴,閏向磊.MATLAB分析與軌跡規劃仿真[J].工業控制計算機,2014,27(8):12-14.
[11] 張舒曼.基于Matlab的機器人運動學械臂控制系統研究[D].湖北:湖北工業大學,2014.
[12] 李遠重.基于FPGA的5自由度工業機的PUMA560機器人運動仿真研究[J].廣西科學院學報,2010,26(4):397-400.
RESEARCH AND IMPLEMENTATION OF SCARA MANIPULATOR CONTROL ALGORITHM IN EXPERIMENTAL TEACHING
Yao Xiaotong Pan Yingli Gao Yu
(CollegeofElectronicalandInformationEngineering,LanzhouJiaotongUniversity,Lanzhou730070,Gansu,China)
Aiming at the experimental teaching, an open SCARA teaching manipulator is designed, and the research on the control algorithm is the teaching key points. Simulation design and physical design are used for the first time, as the teaching of two main parts. According to the D-H parameter method, the kinematics equation is determined. The kinematics equation is used to analyse the forward and inverse kinematics of the manipulator, and the motion planning of manipulator is completed according to the trajectory planning. The model of the manipulator is established by MATLAB, and the accuracy of the pre control algorithm is validated by simulation model movement. The algorithm completes PC control system by using Visual Studio 2013, finally through the PC programming control the manipulator to complete object handling work. The manipulator can accurately realize the rotation and handling function to verify the correctness of the control algorithm and simulation design, and can better meet the needs of experimental teaching.
SCARA MATLAB Simulation Trajectory planning Motion control
2016-09-08。甘肅省蘭州市科技局資助項目(213188)。姚曉通,副教授,主研領域:計算機測控,智能識別應用開發,物聯網應用開發。潘影麗,碩士生。高宇,碩士生。
TP39
A
10.3969/j.issn.1000-386x.2017.06.019
猜你喜歡
科學與社會(2022年1期)2022-04-19 11:38:42
電腦報(2020年35期)2020-09-17 13:25:53
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
科技知識動漫(2016年8期)2016-07-29 20:40:09
