ADS—B與空管監視雷達數據的融合處理研究
2017-07-09 17:00:16嚴景謙
科學與財富 2017年18期
關鍵詞:融合
嚴景謙
摘 要: 隨著我國經濟的發展和人民生活水平的提高,民航運輸的壓力也在日益增長,與此同時,社會對航空事業發展的關注度也在隨之提升。因此,加快構建全新的飛機航行系統,通過ADS-B與空管監視雷達數據融合技術的應用,提高民航飛行軌跡的觀測精度,促進民航飛行安全穩定性的提升,就成為了值得研究的課題。本文主要從ADS-B與空管監視雷達的涵義入手,對ADS-B與空管監視雷達數據的融合處理進行了分析和研究,旨在為ADS-B與空管監視雷達數據的有效融合提供參考。
關鍵詞: 監視技術;空管;數據;融合
前言
隨著我國航空事業的快速發展,空中航班的交通流量也隨之增長,這就給空中交通管制帶來了全新的壓力與挑戰。新時期背景下,為了確保航班的交通安全,有效提升飛機的航行效率,就必須對空管系統加以升級和優化。目前,我國空中管制多依靠甚高頻通信與雷達監視,然而此模式存有明顯局限性,而ADS-B能夠對雷達覆蓋問題加以有效解決,因此,ADS-B信號與空管監視雷達信號的融合處理就成為了本文所要研究的內容。
1 ADS-B與空管監視雷達概述
1.1 ADS-B概述
ADS-B是自動相關監視與廣播式的英文縮寫,從字面含義來理解,自動指的是該設備無需人工操作;相關指的是信號數據信息內容全部源自機載設備;監視指的是設備主要用于對目標具體位置進行確認;廣播指的是數據傳輸的方式并非針對特定的用戶,而是對具有相關裝備的用戶進廣播通知。
1.2 ADS-B與空管監視雷達概述
數據融合指的是通過數據的綜合處理,實現對實體評估的目的。當前,我國的空中管制多采用雷達進行目標監視,然而雷達存在覆蓋面積有限的明顯缺陷。而通過采用ADS-B技術能夠實現對飛機空地與空空的全面監測,同時采取全向廣播的方式,對機載設備進行監控信息的自動發送與接收,其中,監控信息的內容包括了飛機飛行的經緯度、速度、高度、方向、識別信息等內容。因此,在航空系統中應用ADS-B技術能夠為飛機航行提供可靠的監控數據,同時快速進行地形、天氣等與飛行相關的關鍵性信息和內容的傳送,以此提高飛機飛行的安全性。此外,該項技術的投入成本較低,通常只占雷達系統資金投入的1/10,且具備無盲區、使用壽命長等優勢。因此,ADS-B在我國航空事業發展方面具有廣泛的應用前景。
2 ADS-B與空管監視雷達數據的融合處理
當前,ADS-B和空管監視雷達數據融合通常采用兩種方式,一是優選法,即在管制終端僅顯示ADS-B航跡或是雷達航跡,而非采取不同符號對ADS-B和雷達航跡予以區分,此類方法操作簡單,較為容易實現,它可對雷達覆蓋區域進行雷達航跡的顯示,對雷達未覆蓋區域進行ADS-B航跡的相關顯示。然而,它具有明顯缺陷,即無法對ADS-B和雷達所覆蓋區域進行航跡的及時告警,同時,由于ADS-B與雷達在進行目標相關位置計算時所采用的算法差異,致使目標跨越兩者交疊覆蓋區時常會產生嚴重跳點狀況等。第二種方法則為融合法,采用此法可對優選法所存在的漏洞進行有效彌補。
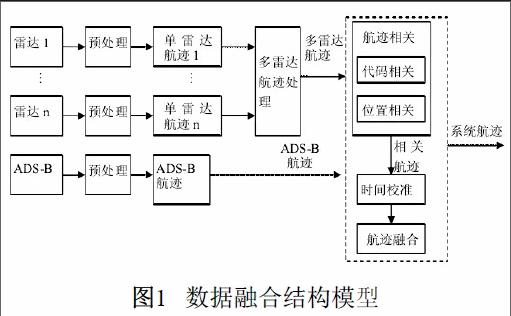
2.1 構建數據融合模型
通常來講,數據融合的功能主要包括了信息校準、識別、相關與估計等內容,其中,校準與相關主要是為接下來的目標識別與估計進行準備作業,而實際的融合正是在識別與估計當中進行的,圖1為ADS-B與多雷達數據進行融合的構建模型,通過ADS-B和雷達數據信息的有效融合,能夠實現對同一區域不同目標的實時監測。
2.2數據的融合方式
通常來講,數據融合系統可分為分布式、集中式與混合式。其中,分布式作為一種能夠有效避免信息數據出現損失的融合方式,在現有的空管監視系統當中得到了應用與推廣。
在分布式結構的融合系統中,首先會形成各個目標本身的本地航跡,然后將相關處理信息及結果傳遞至融合中心處,再在融合中心處加以融合,從而生成更加精準的系統航跡。
在ADS-B和多雷達的數據處理過程中,首先,需要將各雷達的輸入數據與ADS-B數據加以校驗;其次,對其中所包含的錯誤數據進行剔除,以此形成完整的航跡數據,并給出相關目標的狀態估計;然后,將相關數據信息傳送至多雷達的融合系統當中去,使雷達與ADS-B產生的本地航跡在進行坐標變換及時空校準后,再進行與系統航跡的關聯及融合;最后,實現ADS-B和空管監視雷達相關數據信息的高效融合。
(1)前端雷達的數據處理
由于傳送至航管中心的ADS-B和各雷達數據格式各有差異,且考慮到傳輸過程中的不確定性,極易出現數據信息錯誤的狀況發生,因此,需要對數據的格式進行分析,同時,還需依照預先設定的規則和標準對數據加以校驗,并將其中明顯出現錯誤的數據剔除,最后,才能對數據加以集中處理。
(2)單雷達與ADS-B的數據處理
首先,需進行ADS-B與各雷達數據的格式識別,在確認無誤后,再依照各自的數據格式,對所接收到的數據加以分析和解釋,同時,將數據內容轉換成系統內部所設置的統一數據格式,再采取經緯度坐標系對數據內容進行坐標的同步轉換,以便后續處理。
(3)多雷達與ADS-B的融合處理
由于各臺雷達均將各自所在的地理位置當作參照對象,進行實際目標運動路徑的具體探測,這就導致數據信息缺乏在時間、空間、參照對象及坐標系等方面內容的統一標準。因此,在單雷達和ADS-B將航跡傳送至后端展開多雷達數據的相關處理作業之前。必須對時間軸進行校準,對正北方向加以校正,同時對坐標變換進行系統性的統一處理,在以上預處理工作完成以后,方可進行自動化系統中時空參考坐標的統一化處理,以此降低數據融合過程中所產生的誤差。
在對單雷達數據進行處理后,使相關數據信息格式統一轉換成內部標準格式,經過上述操作,使系統接收到的雷達探測數據均為統一格式,然后再采取分布式傳感器進行融合系統的功能模型構建,同時,還需以各個單雷達所探測的航跡跟蹤為基礎,對源自不同雷達的不同航跡是否表示同一目標加以判斷,并依據下列條件對不同站點發送的目標信息進行合并處理:①速度相關;②位置相關;③高度相關;④24bit的地址碼及二次代碼相關。
由于系統于同一時間會對雷達與ADS-B所發送的兩種數據信息進行判斷,以此為空管中心提供誤差較小的系統航跡,從而確保航跡準確度。在這一過程中,主要通過多路傳感器的數據融合模塊(MST),并采取動態數據進行經度檢測的方式,對ADS-B及雷達數據信息加以平衡,同時,對一個目標相關聯的多個數據采用加權法進行計算,若某傳感器質量出現下降,則系統MST會自動將其權重予以降低,必要時,甚至會完全舍棄。
系統航跡一經產生,系統MST就會將該航跡同飛機現有飛行計劃加以關聯,若航跡內容中含有二次代碼,則此關聯需建立在二次代碼與飛行計劃基礎之上,此時,航跡標牌則會顯示與飛行計劃相關聯的具體航班號。
若系統航跡僅包括含有ADS-B數據信息的相關報告,則建立在飛行計劃與二次代碼相關的準則無法適用于此情況,此時,系統會依據飛行計劃中相應的飛機注冊號及航空公司來對24bit地址碼進行確認,在確認以后,系統MST會將二次代碼予以24bit地址碼的替換操作,之后再與飛行計劃加以相應關聯。
分布式系統能夠有效壓縮數據信息數量,從而降低傳感器與數據融合中心處二者間的信息通訊負荷,同時,中心處理器也能夠對相關航跡數據進行處理,以此降低融合中心的負擔,提高數據處理效率。
3 總結
綜上所述,通過對ADS-B技術的應用,能夠實現與傳統雷達系統的協同作業,以此提升空管中心對飛行目標的監控效率。本文主要對ADS-B與空管監視雷達數據的融合處理方法進行了分析和研究,從而確保飛機的安全穩定飛行。■
參考文獻
[1]劉軒宇. 淺析ADS-B與空管監視雷達的融合處理方式[J]. 通訊世界, 2015(16):246-247.
[2]陳霄. ADS-B與雷達組合監視數據融合方法研究[J]. 無線互聯科技, 2015(23):110-111.
[3]盧升云. 空管自動化系統的多雷達與ADS-B數據融合技術綜述[J]. 通訊世界, 2016(6):109-110.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
