基于AMESim和Matlab/Simulink的耦合振動臺建模仿真
2017-07-03 16:02:06段云龍
兵器裝備工程學報 2017年6期
段云龍
(駐某地區軍代室, 河北 張家口 075041)
?
【機械制造與檢測技術】
基于AMESim和Matlab/Simulink的耦合振動臺建模仿真
段云龍
(駐某地區軍代室, 河北 張家口 075041)
運用AMESim仿真軟件對液壓系統進行了建模,利用AMESim和Matlab/Simulink接口功能建立伺服系統的聯合仿真模型,進行了仿真試驗對比分析。仿真結果表明,該系統能夠在兩個自由度上譜再現車輛運輸過程中的隨機振動環境。
AMESim;Matlab/Simulink;二自由度耦合;振動臺;仿真
車輛在地面行駛中的實際振動是一種寬帶隨機振動[1],它可以分解為三個平動和三個轉動的六自由度振動。電液伺服道路模擬振動臺由一個或幾個液壓缸組成的振動臺面組成。試驗時,將被試零部件裝夾在臺面上,通過臺面振動,模擬路面不平度對零部件的激勵[2]。相關實驗可以通過設備進行,也可以通過計算機模擬,避免設備條件的限制。
實驗研究表明,車體在運輸過程中,六個自由度隨機振動的功率譜密度差別很大,其中上下振動與俯仰振動的功率譜密度遠大于其他四個自由度。從經濟性和實用性角度出發,本文結合某工程實際需要構思了一種可實現上下振動和俯仰振動的二自由度耦合電液振動臺,并運用AMESim和Matlab/Simulink接口功能建立了伺服系統的聯合仿真模型。仿真結果表明,該系統能夠在兩個自由度上譜再現車輛運輸過程中的隨機振動環境。
1 機構的組成與自由度分析
機構的原動件是兩個液壓缸,一個液壓缸底部固定在地面上,另一個液壓缸底部連接一個轉動副,兩缸的輸出端分別連接轉動副,共同支撐起振動臺面,通過兩液壓缸的不同輸出,實現臺面的上下振動和俯仰振動,結構示意圖如圖1。若將其視為平面機構,它的本質是一種平面連桿機構的演化形式,如圖2所示。OD為機架,搖桿OA與機架OD組成轉動副,桿DE垂直固定在機架上,A,B分別與桿OA和DE組成移動副。兩個移動副為機構的兩個驅動副,當機構的兩個移動副作為輸入時,連桿AB的位置發生變化[3]。
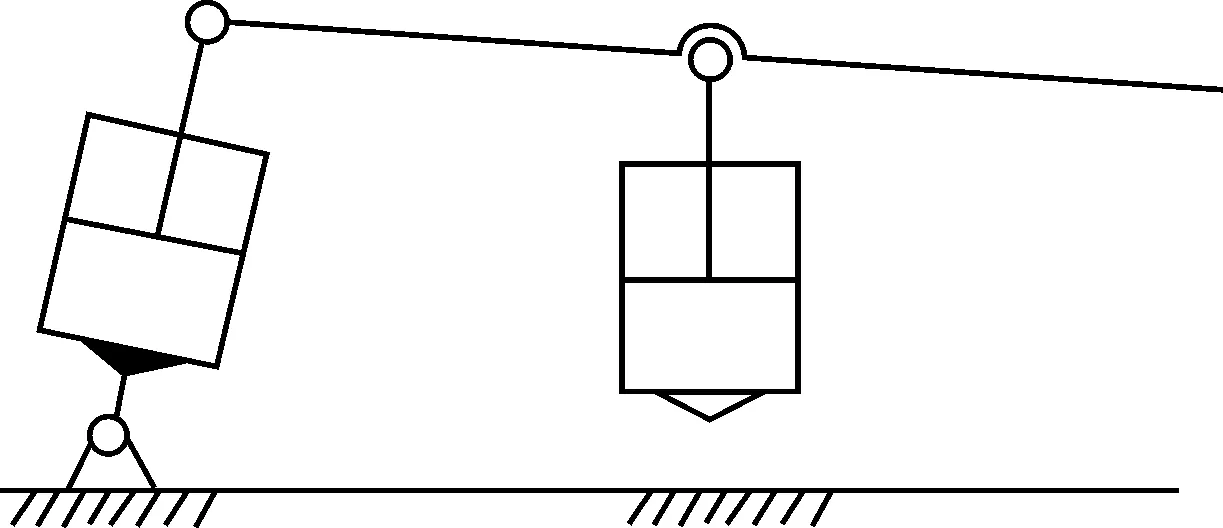
圖1 耦合機構示意圖
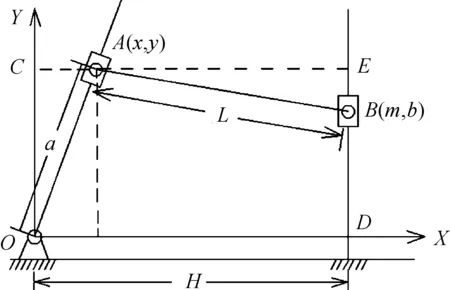
圖2 平面連桿機構原理圖
由圖2可知該機構活動構件數n=4,低副數p1=5,高副數ph=0,帶入平面機構的自由度計算公式,機構的自由度數F為
F=3n-2p1-ph=2
式中:n為機構的活動構件總數;p1為低副數目;ph為高副數目[4]。所以本機構為兩自由度機構,滿足上下振動和俯仰振動同時存在的設計目標。
在這個平面連桿機構中有兩個原動件,模擬得到二自由度振動的振幅小,搖桿OA和連桿AB不共線,不存在有效驅動力矩為零,因此在機構運動過程中不存在死點位置[5]。
2 耦合振動模擬系統的建模仿真
AMESim軟件提供了一個圖形化的時域仿真建模環境,用于工程系統建模、仿真和動態性能分析,適用于機械與液壓領域的設計[6]。針對控制系統,Matlab/Simulink擁有非常強大的控制系統建模能力,其中包括了模糊控制器的設計模塊。因此,利用AMESim軟件擁有的與Matlab/Simulink軟件的接口,建立伺服系統的聯合仿真模型。
針對耦合振動臺的雙液壓缸驅動的結構,利用AMESim軟件建立聯合仿真模型,對每個臺面都加一個隨機信號和階躍信號來仿真試驗過程中的不確定性干擾,如圖3所示。
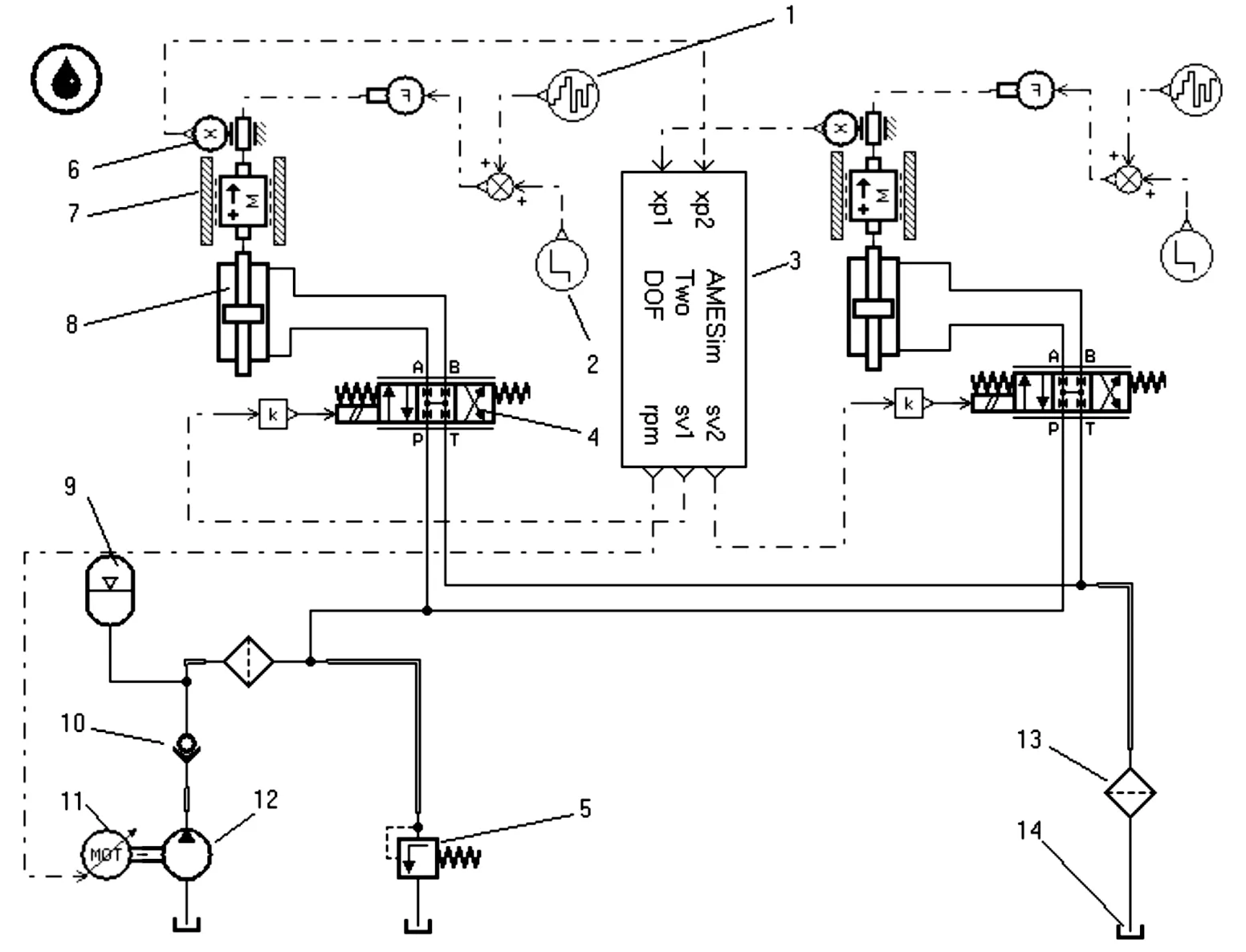
1.隨機干擾;2.階躍干擾;3.聯合仿真接口;4.比例伺服閥;5.溢流閥;6.位移傳感器;7.負載和臺面質量;8.油缸;9.蓄能器;10.單向閥;11.驅動電機;12.定量泵;13.濾油器;14.油箱
圖3 聯合仿真模型圖
Simulink整體仿真模型中作為控制元件的“Fuzzy PID Control”和執行元件的“Subsystem”都是通過“Create subsystem”功能建立封裝后的元件,其核心部分是根據臺面的運動方程編寫的兩個“S-Function”組件,如圖4所示。

圖4 系統聯合仿真
3 仿真結果分析
為了驗證計算機模擬實驗效果,進行仿真分析。如圖2所示,將振動臺演化成平面連桿機構形式,假設兩液壓缸不作動時,a與b的初始值均為1 m,振動臺面長L=3 m,兩液壓缸底端水平距離H=3 m。將解放牌運輸車在普通平板公路以30 km/h車速行駛時車廂的振動環境作為仿真對象,模擬車廂的俯仰和垂直上下兩個自由度的振動。通過真實環境下的實測數據計算出圖2中的液壓缸端點的輸入位移信號,作為仿真模型的輸入信號,設置聯合仿真終止時間為 5 s[7]。振動臺面的仿真信號與系統原始輸入信號對比如圖5和圖6所示。

圖5 垂直上下振動信號對比(m)
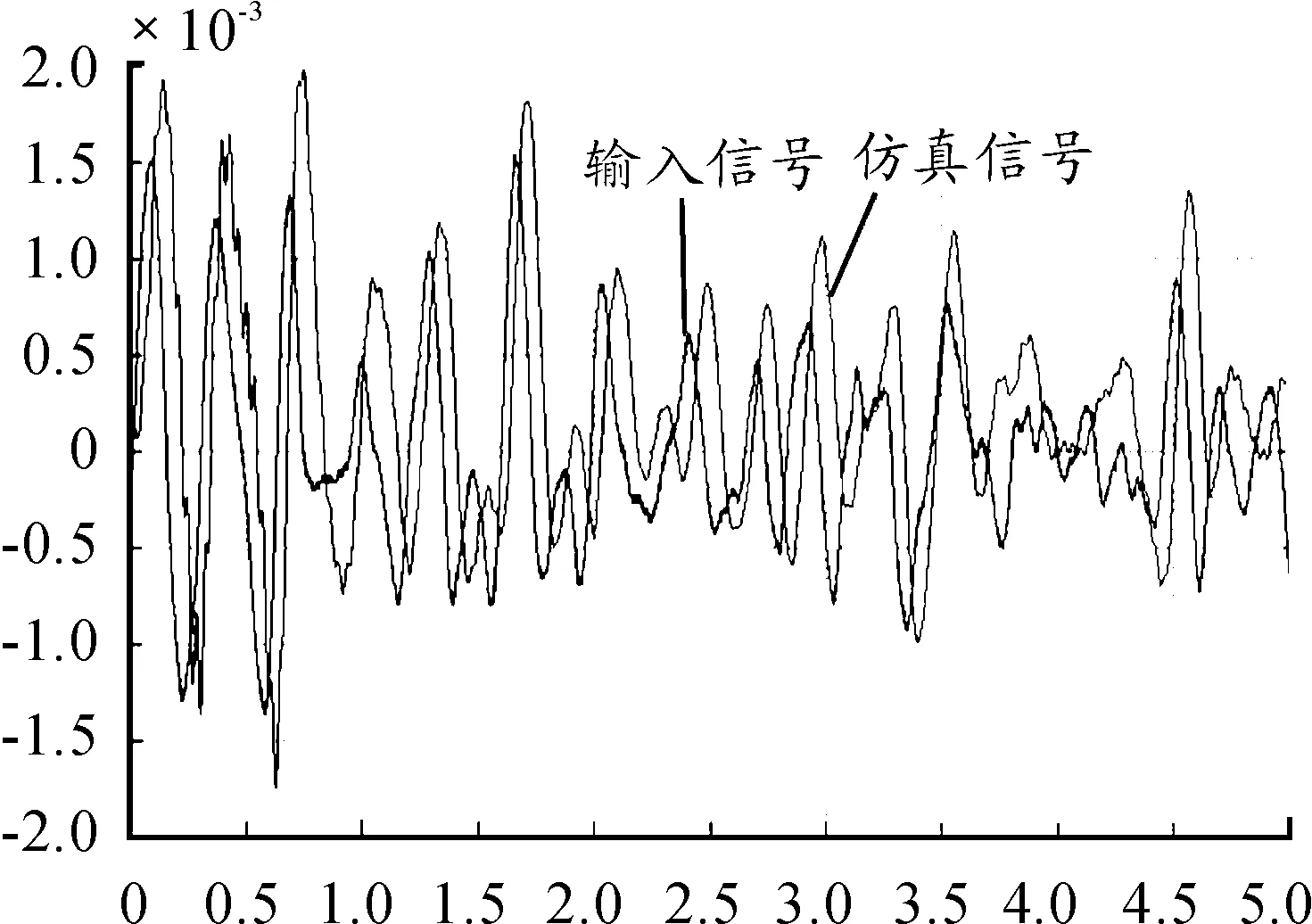
圖6 俯仰角信號對比(rad)
將原始輸入數據與仿真所得數據利用Matlab軟件編程計算,仿真環境下的臺面俯仰角和垂直上下位移的功率譜密度對比,如圖7所示。從功率譜曲線可以看出,原始信號與仿真信號的功率譜密度一致。
通過以上分析,可根據計算得到的臺面中點及端點位置的即時坐標數據,應用Matlab中的“drawnow”函數畫出振動臺面的動態示意圖,更加直觀表達二自由度振動臺面的運行形式。以仿真運輸車在普通平板公路行駛時的振動環境為例,如圖8至圖11為示意動畫中臺面運動到四個不同位置的截圖。
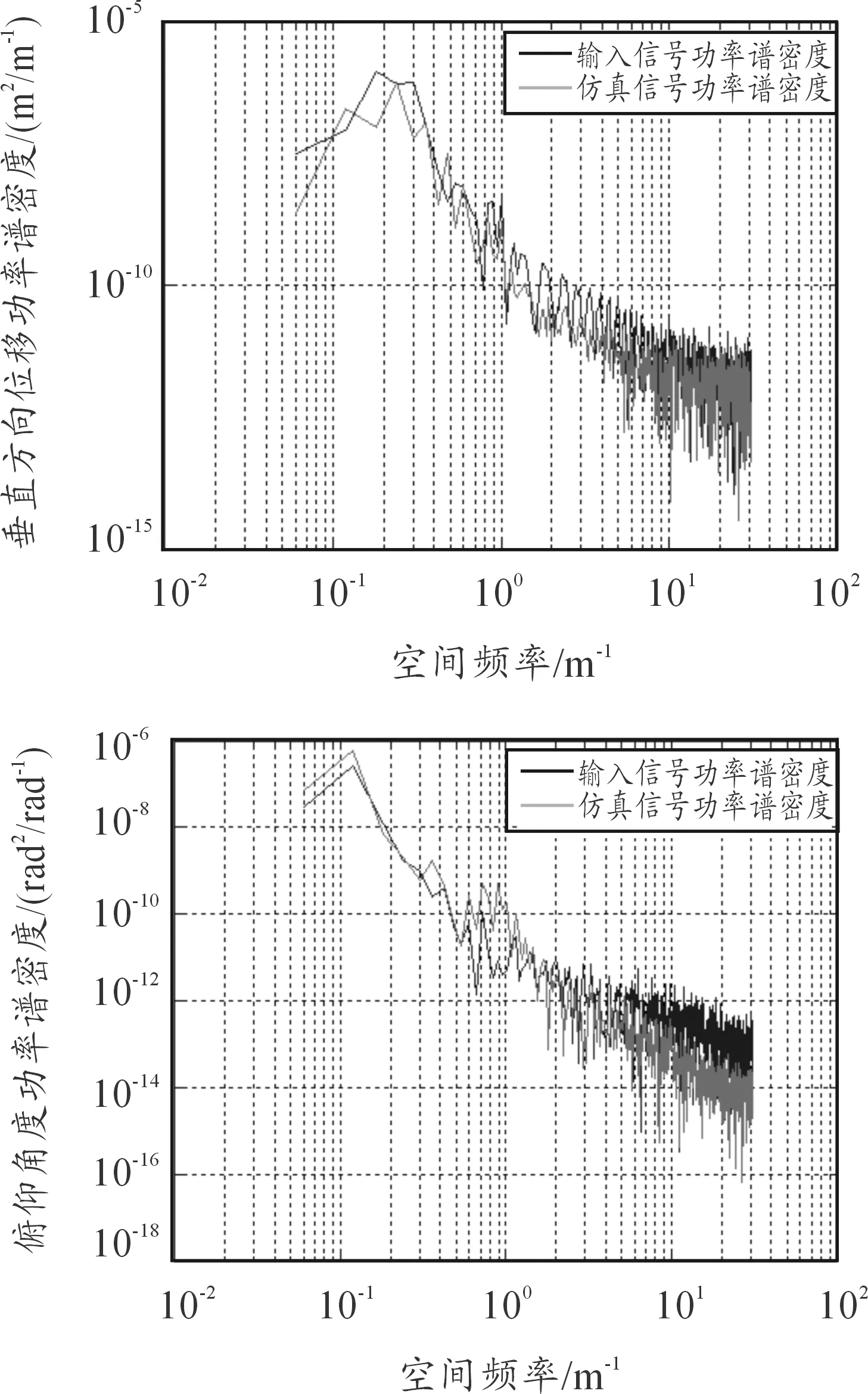
圖7 普通平板公路振動環境功率譜密度對比
圖8 (a)
圖9 (b)

圖10 (c)
圖11 (d)
4 結論
提出了一種適用于電液伺服道路模擬系統結構簡單和易于控制的二自由度耦合振動臺。該振動臺具有結構簡單和易于控制等優點,并且造價和使用費都較低,模擬實現的自由度數目少,可靠性較強;對其結構進行了初步分析,為進一步研究奠定了基礎。通過基于AMESim和Matlab/Simulink軟件的聯合仿真結果表明,該結構適用于公路運輸等振幅較小的振動模擬系統。
[1] 余志生.汽車理論[M].北京:機械工業出版社,2007:202-211.
[2] 楊云.電液道路模擬振動臺及功率譜再現控制的研究[D].西安:西安交通大學,2003:3-12.
[3] 李盛海.液壓機構及其組合[M].北京:清華大學出版社,1992:8-12.
[4] 安子軍.機械原理教程[M].北京:機械工業出版社,2004:10-14.
[5] 張靜,許忠華,臧文福.確定平面低副四桿機構死點位置的新方法[J].森林工程,2007,23(4):28-29.
[6] 秦家升,游善蘭.AMESim軟件的特征及其應用[J].工程機械,2004(12):6-8.
[7] 段云龍,韓保紅,馬英忱,等.一種二自由度并聯電液振動臺的機構和運動學研究[J].機械傳動,2011,35(6):34-36.
(責任編輯 唐定國)
Simulation for Coupled Shaking Table Based on AMESim and Matlab/Simulink
DUAN Yun-long
(The Military Representative Section in a Certain Area, Zhangjiakou 075041, China)
The hydraulic system of simulation is modeled by using software AMESim. The joint simulation model of servo system is established by using AMESim and Matlab/Simulink interface function, and then simulation test is analyzed in comparison. Co-simulating results show that the system can reproduce the random vibration environment of ammunition transportation in two degrees of freedom.
AMESim; Matlab/Simulink; two-DOF coupled; shaking table; simulation
2017-02-15;
2017-03-16
段云龍(1986—),男,碩士,工程師,主要從事振動測試研究。
10.11809/scbgxb2017.06.026
format:DUAN Yun-long.Simulation for Coupled Shaking Table Based on AMESim and Matlab/Simulink[J].Journal of Ordnance Equipment Engineering,2017(6):117-120.
TJ06
A
2096-2304(2017)06-0117-04
本文引用格式:段云龍.基于AMESim和Matlab/Simulink的耦合振動臺建模仿真[J].兵器裝備工程學報,2017(6):117-120.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
