電渦流傳感器在火箭滑橇實驗中的應用
2017-07-03 16:01:50龐春橋周曉軍袁書強
兵器裝備工程學報 2017年6期
龐春橋,陶 鋼,周曉軍,聞 鵬,袁書強
(1.南京理工大學 能源與動力工程學院, 南京 210094; 2.中國兵器工業集團第52研究所,浙江 寧波 315000)
?
【裝備理論與裝備技術】
電渦流傳感器在火箭滑橇實驗中的應用
龐春橋1,陶 鋼1,周曉軍1,聞 鵬1,袁書強2
(1.南京理工大學 能源與動力工程學院, 南京 210094; 2.中國兵器工業集團第52研究所,浙江 寧波 315000)
為了方便準確地測量相關的力學數據,不斷完善火箭滑橇設計的科學性、安全性和可靠性,根據火箭滑橇的實踐,給出電渦流傳感器在火箭滑橇中的一些應用。通過安裝電渦流傳感器可以得到滑橇的全程運動位移曲線,與其他方法相比,操作簡單、價格便宜、性能可靠。對原始數據進行簡單的微分運算即可得到滑橇的運動速度、加速度,可以為火箭滑橇車體強度的設計提供參考。同時,通過與車體運動加速度振動數據比較,可以得到滑橇運動振動幅度與運動速度之間的關系,有助于解決火箭滑橇,被試品的力學環境適應性問題。
火箭滑橇;電渦流傳感器;振動;力學
火箭滑橇已經是一個重要的,可以完成諸多特殊任務的專用實驗設備[1-6]。實驗人員可以根據不同任務類型,設計出滿足不同要求的滑橇[7]。設計者依據測量的相關力學數據,可以完善設計的科學性、安全性和可靠性[8]。例如,根據火箭滑橇高速運動下測試的車體振動數據,分析其所包含的物理內涵,得到有用的信息,有助于解決火箭滑橇設計中,被試品的力學環境適應性問題。以往采用的火箭滑橇運動參數測試方法,很難精確得到有關滑橇運動位置—時間信息,因此難以深入認識實驗中存在潛在問題。文獻[1,9-10]介紹了諸多測試相應位置速度的方法,如采用光纖傳感器、區截靶和光學裝置等方法,可以測量滑橇運動的局部位移—時間關系,但都無法覆蓋全程,即使是光電傳感器測試方法,也存在不足,如易受到干擾等問題。
本研究引入的電渦流傳感器,能有效地測量火箭滑橇運動的全程位移,適應性非常好、使用簡單、價格便宜和可靠性高,同時與火箭滑橇實驗中的振動數據相結合,可以得到更加有用的結果,如滑橇運動振動幅度與運動速度之間的關系。這對科學、合理地設計高速滑橇,保證安全性,使被試品滿足滑橇運動力學環境要求,具有更加科學和現實的意義。通過相關試驗案例,給出一些典型數據的處理方法和結果。
1 實驗測試傳感器
1.1 加速度傳感器
火箭橇車體運動振動參數測量采用MEMS加速度傳感器,傳感器測量精度:① 加速度傳感器測量分辨率:<1 mg;② 加速度傳感器線性度:≤1.0%F·S;③ 加速度的測量精度在±2%以內;④ 頻率響應(5%)>1 000 Hz;⑤ 工作范圍±50 g。加速度傳感器安裝布置在滑橇的桁架上。
1.2 電渦流傳感器
選用電渦流傳感器測量裝置測量滑車的位移,在滑車桁架側面安裝一個電渦流傳感器。當傳感器經過軌道側面的扣件螺釘上方時,會產生電渦流,從而產生磁場。由于磁場的變化,會在傳感器的測量繞組中產生電壓信號u(t),通過對電壓信號u(t)進行整形,得到規整脈沖信號,使用計數電路對脈沖信號進行計數儲存,因軌道固定扣件本身的間距是已知的,因此可以得到精確的滑橇運動位移—時間數據。
電渦流式傳感器具有很高的靈敏度、良好的線性度和極強的抗干擾能力、測量范圍大、不易受油污、水等介質的影響,結構簡單、安裝方便和價格低廉,能實現不接觸測量,其原理見圖1。電渦流傳感器主要技術參數:
1) 探頭直徑:Φ8 mm;
2) 線性度:系統誤差≤±1%;
3) 時間響應:最高為0.1 ms;
4) 環境溫度:探頭 -40 ℃~+100 ℃(相對濕度:≤90%);
5) 可以抗1 000 g以上的沖擊加速度。
圖1 電渦流傳感器安裝
2 火箭橇試驗及相關數據分析
圖2為常規火箭橇試驗場景,圖3為火箭發動機推力時間曲線。
圖2 試驗場景

圖3 火箭發動機推力時間曲線
2.1 電渦流傳感器的位移—時間數據
電渦流傳感器得到的火箭滑橇的運動位移曲線(見圖4),經過對時間的微分,得到滑橇運動速度曲線(見圖5、圖6)。
由曲線圖可知,滑橇運動基本經歷了3個過程:① 加速過程,速度不斷升高;② 短暫的滑行過程;③ 剎車減速過程。
對原始位移數據進行二次微分,可以得到滑橇運動加速度與距離的關系(見圖7)和加速度曲線(見圖8)。
圖4 位移曲線

圖5 速度與距離的關系
圖6 速度曲線
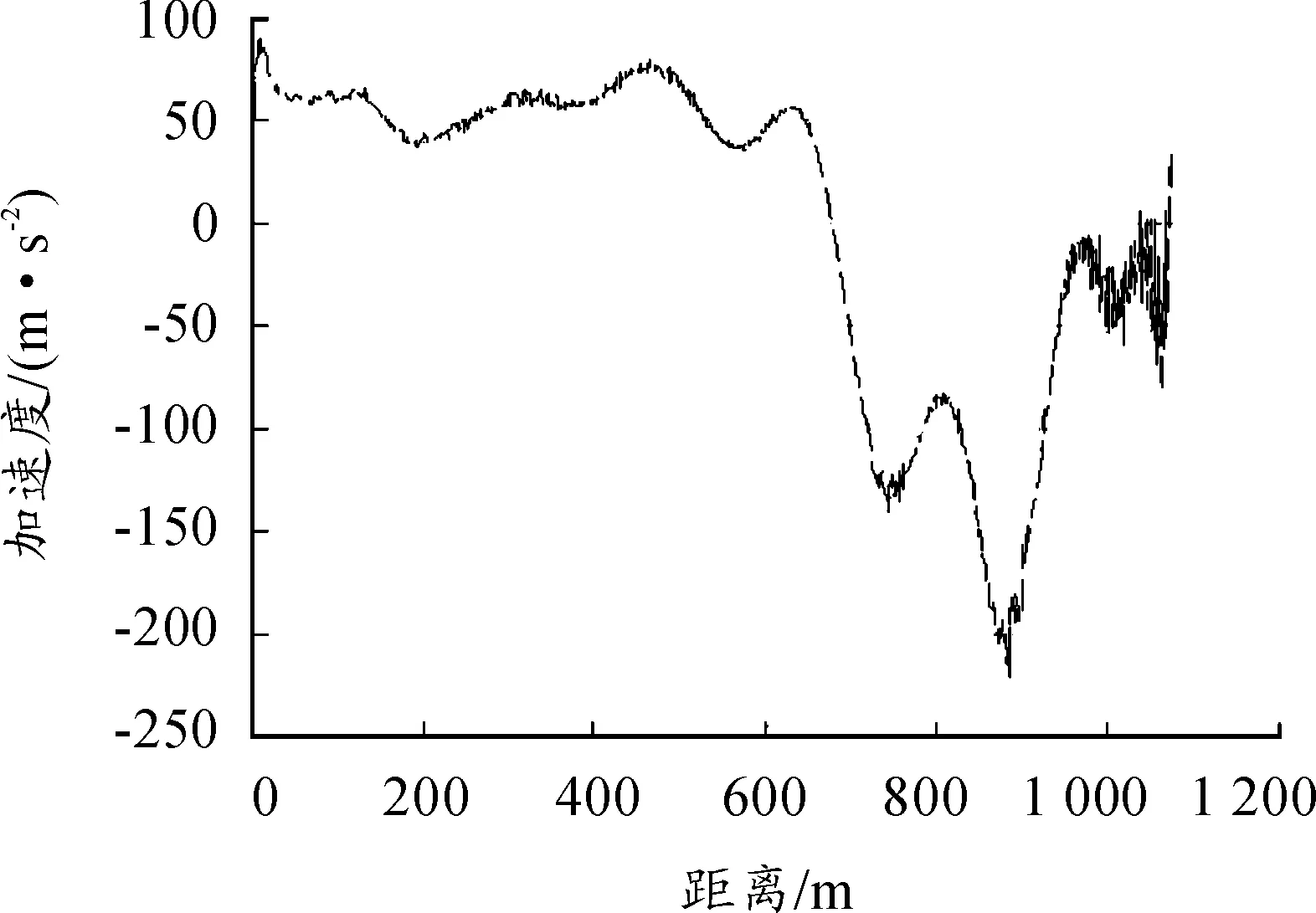
圖7 加速度與距離的關系
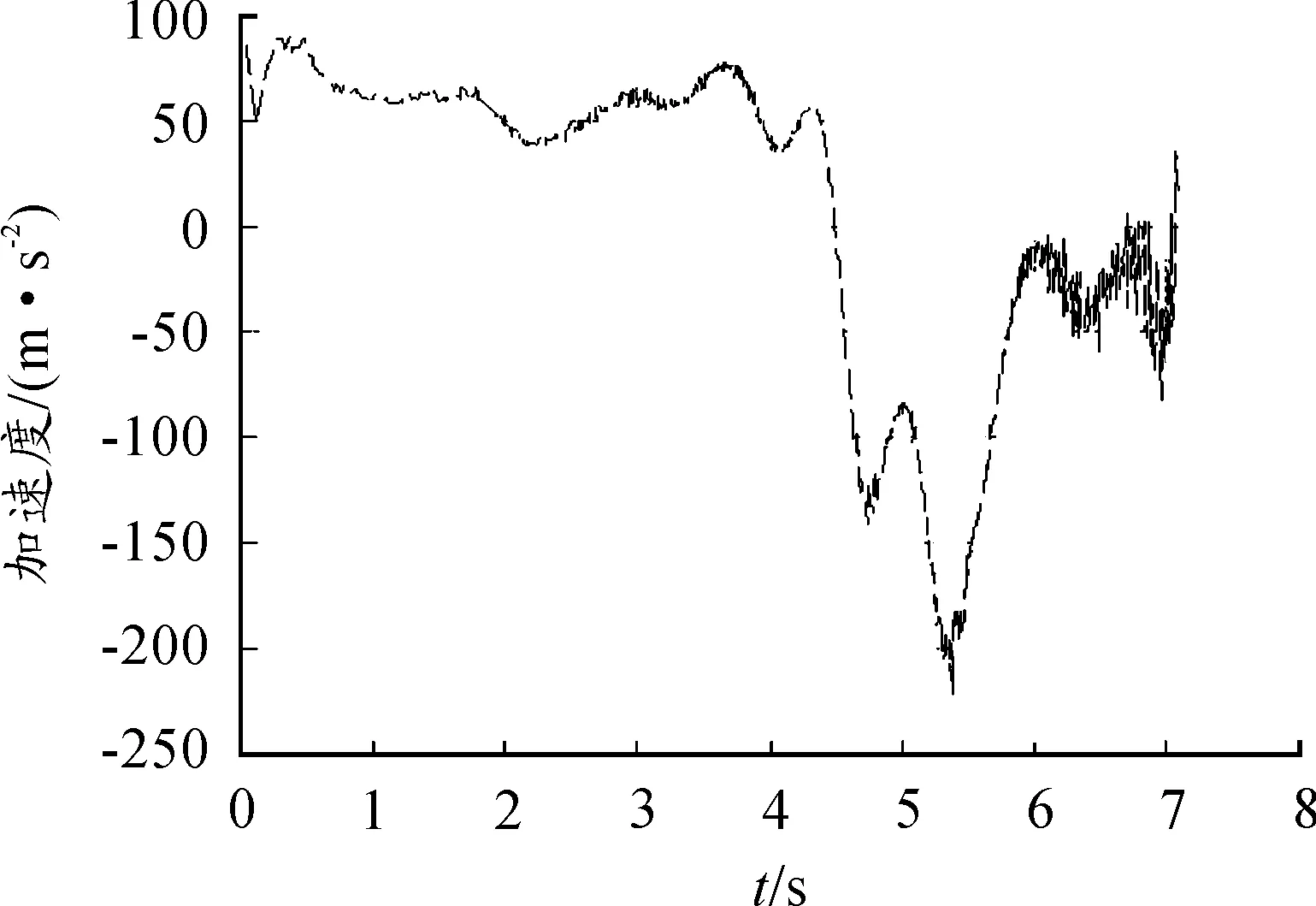
圖8 加速度曲線
2.2 加速度傳感器的X方向振動數據
本試驗安裝在滑車的靠近滑靴的桁架上三軸加速度傳感器,其X軸方向為滑車的運動方向。圖9中的深色實線為振動加速度曲線。對該曲線做多項式擬合,可以得到其中的淺色實線。對其擬合曲線進行單獨放大處理得到圖10。由此可得到滑車的實際平均加速度值(約為:72 m/s2),加速度擬合曲線反映出火箭橇的加速過程實際上是不均勻的。

圖9 X方向加速度振動隨時間變化
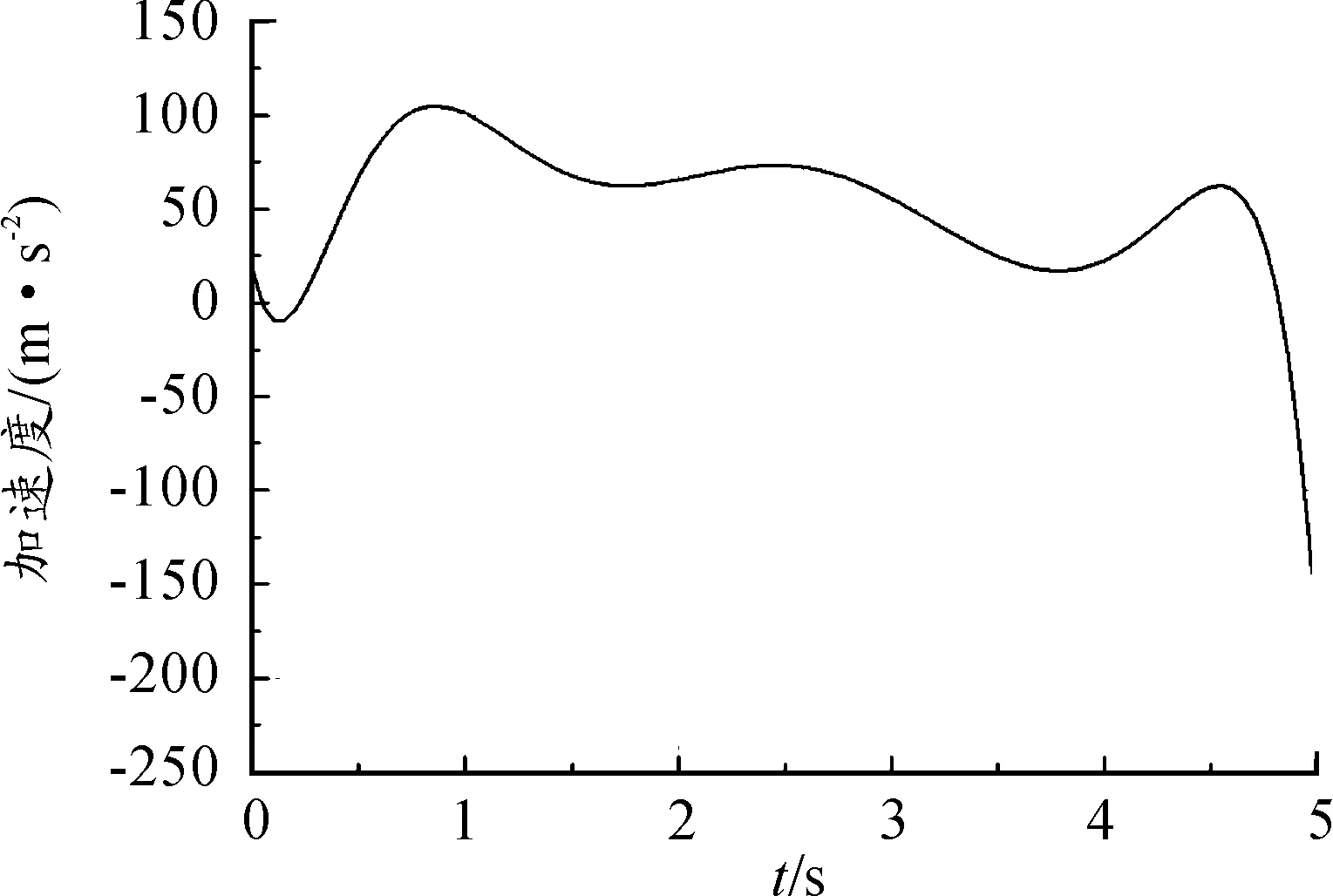
圖10 X方向加速度振動隨時間變化
參考發動機推力曲線,比較電渦流傳感器的加速度曲線(見圖8)和三軸加速度傳感器的加速度擬合曲線(圖10),可見前者得到的加速度曲線更能反映實際情況。這主要是因為車體的振動頻率范圍很大,對其產生主要影響的頻率范圍在100 Hz左右,三軸加速度傳感器的頻響在1 000 Hz以上,導致噪聲大,信號處理困難,不同的處理方法得到的結果會有很大差異。三軸加速度傳感器測得的加速段基本能夠反映火箭橇的加速度,但是在剎車段時問題就比較嚴重了,由于火箭橇水剎車段振動加強,導致局部噪聲增強,這就給信號處理增加了難度,很難保證加速度傳感器減速段的正確性。而電渦流傳感器直接測量位移,得到的是最基礎的數據,誤差很小,由其得到速度和加速度可以很好地解決以上問題。因此,采用電渦流傳感器能夠準確地給出剎車段的減加速度情況,可為車體的強度設計提供依據。
2.3 加速度傳感器的Y和Z方向振動數據
加速度傳感器布置的Y方向為滑橇側向的左右振動,Z方向為上下振動。實驗記錄的加速度傳感器的Y和Z方向振動數據如圖11和圖12所示。
2.4 三向加速度振幅與滑橇運動速度的關系分析
雖然三軸加速度傳感器在火箭橇加速度測試方面不理想,但是在測量車體振動方面起著不可替代的作用。因此有必要對三軸加速度的振動數據進行分析。由上述加速度曲線可知,滑橇的振幅隨滑車速度增加存在一定的關系。于是,可以對3個方向的振動數據做以下數據處理,即進行標準差數據分析(MSE),同時進行多項式擬合,如圖13中的平滑曲線,該曲線實際反映了車體所受到的沖擊振動值。由圖中曲線可知:X、Y、Z方向的MSE曲線具有一致的趨勢,同時,在剎車處存在局部振動幅度增大的趨勢。
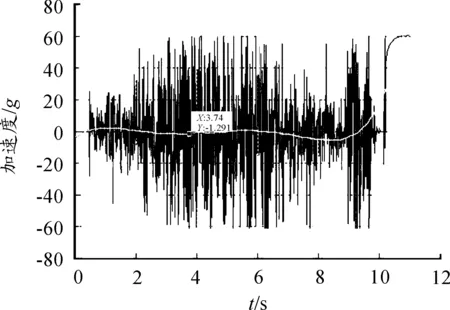
圖11 Y方向振動加速度曲線和擬合曲線
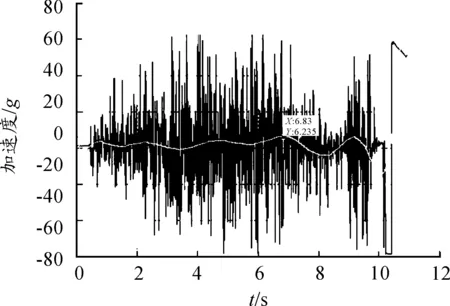
圖12 Z方向振動加速度曲線和擬合曲線
3個方向的MSE曲線的最大值順序:Y>Z>X,反映出Y方向的縫隙對振動貢獻最大,設計時應注意。火箭發動機和水剎車對加速度振動幅度有較大影響,但僅限于局部。
將圖13的MSE數據的多項式擬合曲線與電渦流方法得到的滑車v-t曲線(見圖6)相比較,可見這兩條曲線趨勢非常一致,基本上呈線性關系,如乘以系數,即可預測三項振動幅值。這種定量關系可用于火箭滑橇運動振動幅值的預測,指導滑橇實驗的設計。
3 結論
1) 電渦流傳感器可以精確的測量滑橇的運動位移曲線。該測量方法簡單、成本低、數據可靠。相比加速度傳感器復雜的振動信號,并考慮到其信號處理難度及噪聲影響,電渦流傳感器只需對原始數據進行簡單的微分運算即可得到的滑橇速度和加速度,基本消除了信號處理時的誤差,因此采用電渦流傳感器得到的速度和加速度數據更加準確;2) 電渦流傳感器測量的數據結合滑橇桁架上的三軸振動傳感器得到的數據,進行分析可以清晰的得到滑橇三向加速度振動數據的標準差數據(MSE)擬合曲線和滑橇運動速度曲線之間存在非常一致的線性相關性,而MSE曲線實際反映了車體所受到的沖擊振動值大小,因此,這種關系可用于指導滑橇實驗的設計,同時對于建立滑橇設計的振動數據庫具有很好的參考價值。
[1] HOLLOMAN.Holloman High Speed Test Track Design Manual-46th Test Group[Z].Holloman AFB,NM 88330-7714,2005.
[2] 王健,吳軍基,陶鋼.火箭橇軌道不平順功率譜密度分析[J].彈道學報,2008,20(4):81-83.
[3] 鄒偉紅.火箭滑撬空氣動力的數值模擬[D].南京:南京理工大學,2008.
[4] 余元元.雙軌火箭滑車高速水剎裝置研究[D].南京:南京航空航天大學,2008.
[5] ANDREW J L.Computational aerodynamic analysis of the flow field about a hypervelocity test sled[D].Air Force Institute of Technology Graduate School of Engineering and Management,2002.
[6] 王健.高速火箭橇—軌道系統耦合動力學研究[D].南京:南京理工大學,2011.
[7] JAMES L LAMB.Critical velocities for rocket sled excitation of rail resonance[J].Johns Hopkins APL Technical Digest,2000,21(3):448-458.
[8] 王軍評,毛勇建,董龍雷,等.火箭橇試驗推力測量方法研究[J].振動與沖擊,2013(18):59-62,69.
[9] 李菊葉,紀留利.光電測速裝置的設計[J].海南大學學報:自然科學版,2012(1):66-70.
[10]唐瑞.GPS技術在高速火箭橇試驗測速系統中的應用[J].儀器儀表與分析監測,2013(4):14-16.
(責任編輯 周江川)
Application of Eddy Current Sensor in the Experiment of Rocket Sled
PANG Chun-qiao1, TAO Gang1, ZHOU Xiao-jun1, WEN Peng1, YUAN Shu-qiang2
(1.School of Energy and Power Engineering, Nanjing University of Science and Technology, Nanjing 210094,China;2.No.52 Institute of China Ordnance Industry Group, Ningbo 315000, China)
In order to measure the related mechanical data conveniently and precisely, and constantly improve the scientific, security and reliability of the rocket sled design. Based on the practice of the rocket sled, this paper gives some application of the eddy current sensor in rocket sled. Through setting up the eddy current sensor, it can get the displacement curve of rocket sled motion. Compared with other methods, it is simple, cheap and reliable. The velocity and acceleration of rocket sled can be obtained by the simple differential operation of the initial data, which can be used as a reference for the design of the rocked sled body strength. At the same time, through comparing with vehicle vibration acceleration data, we can get the relationship between the amplitude and velocity of the sled motion. This helps to solve the problem of the mechanical environment adaptability of the tested product in the rocket sled.
rocket sled; eddy current sensor; vibration; mechanical
2017-02-15;
2017-03-25
龐春橋(1990—),男,博士,主要從事終點彈道毀傷研究。
陶鋼(1962—),男,博士,研究員,主要從事終點彈道毀傷研究,E-mail:taogang@njust.edu.cn。
10.11809/scbgxb2017.06.006
format:PANG Chun-qiao,TAO Gang,ZHOU Xiao-jun,et al.Application of Eddy Current Sensor in the Experiment of Rocket Sled[J].Journal of Ordnance Equipment Engineering,2017(6):29-32.
V416.6
A
2096-2304(2017)06-0029-04
本文引用格式:龐春橋,陶鋼,周曉軍,等.電渦流傳感器在火箭滑橇實驗中的應用[J].兵器裝備工程學報,2017(6):29-32.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
