蕩越式巡檢機器人的設計與越障機理
2017-06-29 09:02:34北京聯合大學朱永林閆貴琴楊志成
電子世界 2017年11期
北京聯合大學 朱永林 閆貴琴 楊志成 劉 茜
蕩越式巡檢機器人的設計與越障機理
北京聯合大學 朱永林 閆貴琴 楊志成 劉 茜
針對現有巡檢機器人越障速度低,提出了一種由機體和雙臂結構組成的蕩越式巡檢機器人,可使越障時間縮短為單擺周期。并在總體設計、行走機構設計和越障機理等方面進行了研究。為了驗證機器人結構的合理性,根據機器人機械特性,對其在越障時動力學進行了數學建模分析。利用MATLAB軟件對機器人進行動力學仿真,說明了蕩越式機器人具備越障速度快、所需電機轉矩小的優點。為了進一步驗證理論的正確性,制作了樣機。通過對機器人試驗,機器人能夠蕩越式越障,證明了設計的正確性。
蕩越式;快速搭線脫線;結構設計;越障速度;運動學;仿真

圖1 機器人結構示意圖
架空電纜需要長期的保護和維護,人工維護勞動強度大、工作環境危險、工作效率低。因此,我國主管單位對巡檢機器人的研究非常重視,陸續推出了多款巡檢機器人,并在電力部門獲得一定程度的應用[1-3]。
但是,就目前推出的機器人系統而言,研究重點大多圍繞越障控制問題、障礙自動識別等問題。與實際的應用要求相比,越障過程質心位移平衡式機器人調整時間過長。
1.蕩越式電纜巡檢機器人總體設計
1.1 機器人總體設計及機體自平衡原理
機器人有一個正四棱柱型的機體,機體的兩端各有一條手臂。機器人結構簡圖如圖1所示,每條手臂設計了3個回轉關節、1個平移關節和1個旋轉關節,回轉關節分別是肩部電機、肘部電機、腕部電機;平移關節是電磁閥;旋轉關節是行走輪,行走輪安裝在行走機構中。機器人越障過程中,一般前臂作為吊掛臂,承擔整個身體的重量。同時機體調整姿態也是以前臂動作趨勢提前調整。后臂作為工作臂,調節肩關節、肘關節和腕關節的電機轉動角度,用于調節手臂的姿態,定位行走輪的搭線角度和位置。=
1.2 行走機構的設計
能過快速實現搭線、脫線是蕩越式機器人成功的關鍵,設計能夠快速搭線脫線的機器手尤為重要。行走機構的快速搭線和脫線,在做越障運動時,在動勢能轉化中減少能量損耗,還可提高越障速度[11]。此裝置可以使行走輪從電纜下方直接搭線;從電纜上方直接脫線。它克服了常規電纜機器人在越障時,行走輪需從側方繞過電纜,才能實現搭線和脫線的繁瑣程序。
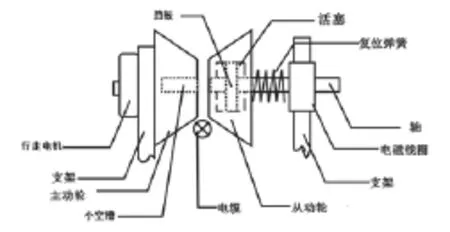
圖2 行走機構結構圖
2.機器人越障機理
機器人無障礙行走時,兩個手臂承受了機器人的重量,機器人機體始終保持水平。其余各關節均處于待命狀態,當行走至坡路時,調整一個肘關節夾角就可以很好地控制機器人的身體姿勢,該機器人有了較好的適應性。
機器人遇到障礙物時,陀螺儀和加速度傳感器測量出機體與地平線的夾角,就可判斷機器人的位姿,通過調整肩關節的角度,就可保持機體水平。并以此為參照,控制另一個機器臂的肩關節、肘關節、腕關節和行走機構協調運動,完成其行走輪脫線、越障、搭線等動作。
圖中“▇”代表左臂行走機構;“□”代表右臂行走機構。

圖3 越障機理過程示意圖
如圖3(A)所示,機器人遇到障礙物停止前行,此時,兩個機器臂均受力。圖3(B)所示,左手臂指關節機構脫線,機器人的兩個肘關節逐步伸直,機器人的質心下移,整個機器人以右手機構為圓心,以兩臂長為半徑做半圓周轉動。圖3(C)右臂回轉關節轉動,當左臂末端行走輪到達電纜下方時,電磁閥開、合運動,指關節完成搭線動作。如圖3(D)所示,機器人完成單臂越障行動。圖3(EF)重復圖3(BC)運動,區別左右手動作順序交換。最后,機器人還原初始狀態,完成越障過程。與文獻[1]蠕動式越障對比,將分解的7個簡單動作,組合成3個復合動作,提高了越障速度。
3.機器人受力仿真
從圖3所示的巡線機器人越障過程可以看出,由于機器人減少了用于平衡機體的質心機構,手臂的各關節承受的轉矩將大大減小。即便如此,為了提高機器人在越障過程中安全性,仍保留兩種不同的越障方式,即傳統方式越障和蕩越方式越障。
設置仿真過程中機器人各部分質量如下: m0=7.63 kg(因為減少了配重模塊等),m1=2kg ,m2=l kg,m3= 0.5kg, m4= 1kg,m5=2kg;l1=250mm,l2=350mm,l3=200mm,l4=350mm,l5=250mm。
巡線機器人在蕩越障礙物時,由于慣性的存在,手臂從脫線到搭線過程中,機器人由勢能轉化成動能,再由動能轉化為勢能。根據機械能守恒定律,機器人越障過程幾乎不需要外加動能。現實來說,各個電機的力矩輸出也會較小。下面詳細分析機器人在越障時各個階段,雙臂各關節的受力情況。
腦,需要讀取物資信息時,掃描該物資的身份二維碼,即可讀取到所需的數據。
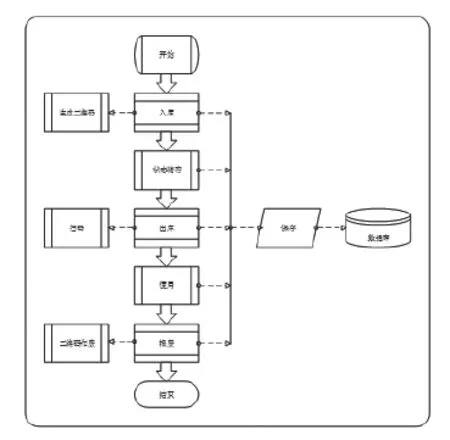
圖2 系統工作流程圖
3.2 系統工作流程
系統工作流程如圖2,物資入庫時,用戶通過軟件客戶端錄入相關信息,并由二維碼生成模塊生成該物資唯一的二維碼,此時數據全部存入數據庫作為初始數據;在儲存過程中物資的狀態發生改變時,需要在數據庫中記錄該物資狀態變化的信息;物資出庫投入使用時可用掃碼設備對其掃碼識別,以讀取初始數據信息;在使用過程中隨著使用時間的推移,其對應信息均由系統自動保存入數據庫;物資達到使用年限,需報廢處理時,在數據庫中刪除其信息,同時其對應的二維碼也隨之作廢。
4.結束語
二維碼技術的興起和其在購物、支付、信息追蹤等各方面的廣泛應用,極大的便利了現代人的生活。本文根據基層臺站物資管理的特點以及二維碼在信息儲存等方面的優點和使用的便捷性,論述了二維碼技術應用于基層臺站物資管理中的可行性和實現方法,為后續基于二維碼技術的臺站物資管理系統開發提供參考。
[1]劉志海、萬麗榮、宋作玲.條碼技術及應用技術標準.化學工業出版社.
[2]BarTender具體功能描述. BarTender官網.