一種六自由度分離體機構運動學分析及仿真
2017-06-29 12:01:58緱雙雙蹇開林
重慶理工大學學報(自然科學) 2017年5期
關鍵詞:模型
緱雙雙,蹇開林
(重慶大學 航空航天學院,重慶 400044)
?
一種六自由度分離體機構運動學分析及仿真
緱雙雙,蹇開林
(重慶大學 航空航天學院,重慶 400044)
針對風洞捕獲軌跡試驗六自由度分離體機構的結構和運動特點,以機器人D-H方法理論為基礎,得到分離體機構的連桿坐標簡圖和運動學參數(shù),建立了該分離體機構的運動學模型。采用矩陣變換得到運動學正解,并將正解得到的尾支桿處坐標系和分離體機構基坐標系的位姿關系通過變換矩陣轉換成末端外掛物模型理論質(zhì)心坐標系和風洞固定坐標系的位姿關系,然后利用變量分離法得到運動學逆解。最后,通過Matlab軟件編寫程序,所得結果與ADAMS軟件運動學仿真結果進行比較,驗證了理論推導的正確性。
分離體機構;運動學;正逆解;D-H變換;仿真分析
風洞捕獲軌跡試驗(captive trajectory system,CTS)又稱可控軌跡試驗。在飛行器的研制過程中,為解決外掛物從其母機上分離之后不至于撞擊到母機或其他鄰近外掛物而危及母機的安全問題,迫切地需要了解和確定外掛物在離開母機初始階段的運動軌跡特性,為外掛物在其母機上的合適布局和投放參數(shù)控制提供可靠的依據(jù)[1]。因此,捕獲軌跡試驗是飛行器研制過程中一項必不可少的實驗項目。美國從20世紀50年代開始了該技術的應用,英國、法國從20世紀70年代開始該實驗技術的研究與應用。中國空氣動力研究與發(fā)展中心于1980年利用1.2 m跨超聲速風洞研制了第1套高速風洞捕獲軌跡試驗系統(tǒng),并于1988年投入使用,完成了大量型號試驗,對我國飛行器的研制做出了重要貢獻[2]。
捕獲軌跡系統(tǒng)的主體機構是一個由計算機系統(tǒng)控制的支撐外掛物模型的六自由度分離體機構。外掛物模型內(nèi)裝有六分量應變天平,主機模型由風洞內(nèi)的主支撐系統(tǒng)支撐,獨立于主機支撐系統(tǒng)的外掛物模型支撐桿從屬于CTS機構做六自由度運動。由于分離體機構是外掛物模型的支撐裝置及其運動的執(zhí)行機構[3],是整個系統(tǒng)的核心,因此對其運動學的研究也是捕獲軌跡試驗能夠順利進行的前提。本文首先用D-H方法建立了分離體機構的運動學模型,求出了該機構的運動學正逆解[4],并用Matlab編寫正逆解程序,將計算結果與ADAMS中的運動學仿真結果進行對比,驗證了理論推導過程的正確性,為捕獲軌跡試驗的順利進行提供保障。
1 分離體機構運動學分析
1.1 分離體機構簡介
分離體機構是一個串聯(lián)六自由度機構,由Z向運動機構、X向運動機構、偏航機構、Y向運動機構、俯仰運動機構、滾轉機構6層子機構構成。尾支桿末端能實現(xiàn)沿著X、Y、Z的平移和俯仰、偏航、滾轉[4]。其中機構的3個平移自由度和俯仰、偏航兩個轉動自由度在風場之外,滾轉自由度在風場之內(nèi)。
分離體機構中有1個伺服電機驅動和5個滾轉絲杠驅動,其中X、Y、Z向的平移自由度直接由滾珠絲杠驅動實現(xiàn)。偏航自由度和俯仰自由度由滾珠絲杠的驅動通過圓弧導軌轉換到旋轉驅動[5],最終實現(xiàn)機構的偏航和俯仰。滾轉自由度由伺服電機的驅動直接實現(xiàn)。
1.2 分離體機構運動學正解
在分離體機構中,偏航和俯仰通過直線變圓弧的方式實現(xiàn),可簡化成直線驅動和旋轉驅動的一個關系式,不影響后續(xù)機構的運動學分析,本文不做詳述,直接將偏航和俯仰按照旋轉驅動來考慮。
給定分離體機構的6個關節(jié)位移,其中包括3個線位移、3個角位移,然后求解外掛物模型理論質(zhì)心在風洞固定坐標系中的位置,這是求運動學正解的過程。根據(jù)分離體機構的結構特征,將其簡化,得到的分離體簡化模型如圖1所示。按照D-H表示法[6]可以建立分離體的連桿坐標系,各連桿參數(shù)[7]和關節(jié)變量如表1所示。

圖1 分離體機構簡圖

連桿iai/mmαi/(°)di/mmθi/(°)運動范圍/(mm/°)1a190°d1(變量)90°-350~3502a2-90°d2(變量)-90°-400~4003a30°0θ1(變量)-15~154a490°d4(變量)180°-α-350~6005a5-90°d5θ5(變量)-25~25600°0θ6(變量)-300~300
表1中:ai為連桿長度;αi為連桿轉角;di為偏距;θi為關節(jié)扭角。那么,由D-H變換原則可知坐標系{i}相對于{i-1}系的變換矩陣為
(1)
式中si=sinθi,ci=cosθi,sαi=sinαi,cαi=cosαi。
將表1中的參數(shù)代入式(1)中,得到各連桿坐標的變換矩陣:
因此,尾支桿處坐標系{6}相對于分離體機構基坐標系{0}的變換矩陣為
上述D-H變換得到的0T6是分離體機構基坐標系到尾支桿坐標系的轉換矩陣。捕獲軌跡試驗最終需要得到外掛物模型理論質(zhì)心在風洞固定坐標系中的位姿,所以還需要建立外掛物模型理論坐標系{w}和風洞固定坐標系{g},見圖2。
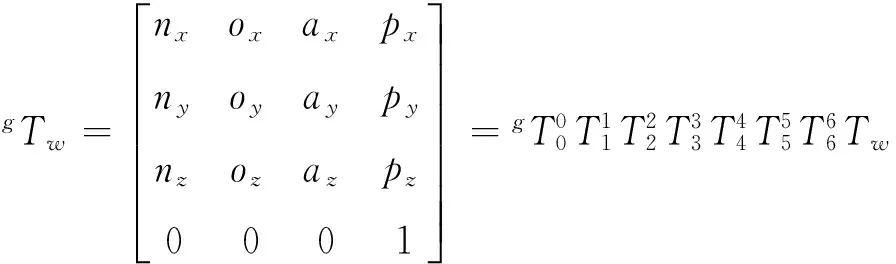
分離體基座標系相對于風洞固定坐標系的轉換矩陣為gT0,外掛物模型理論質(zhì)心坐標系相對于尾支桿末端坐標系的轉換矩陣為6Tw,根據(jù)坐標系之間的關系,可得到
式中:(x0,y0,z0)表示{0}系原點在{g}系中的位置;(x1,y1,z1)表示{w}系原點在{6}系中的位置。則外掛物模型理論質(zhì)心坐標系{w}相對于風洞固定坐標系{g}的變換矩陣
(2)
將式(2)中參數(shù)進一步整理,有
nx=-s5s3-α,ox=-s6c3-α-c5c6s3-α
ax=c5s6s3-α-c6c3-α
px=d2+x0+x1s6c3-α+c5c6s3-α+y1c6c3-α-c5s6s3-α-d5c3-α-a3s3-z1s5s3-α+a4s3-α+a5c5s3-α
ny=c5,oy=-s5c6,ay=s5s6
py=a1+d4+y0+a5s5+z1c5+x1s5c6-y1s5s6
nz=-s5c3-α,oz=s6s3-α-c5c6c3-α
az=c6s3-α+c5s6c3-α
pz=d1-a2+z0-x1s6s3-α-c5c6c3-α-y1c6s3-α+c5s6c3-α+d5s3-α-a3c3-z1s5c3-α+a4c3-α+a5c5c3-α
其中:s3-α=sin(θ3-α),c3-α=cos(θ3-α),si=sinθi,ci=cosθi,(i=3,5,6)
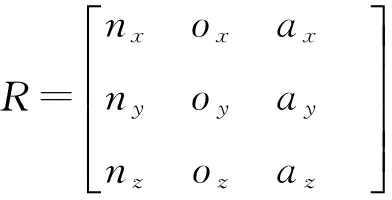
gTw描述了{w}相對于{g}的位姿。該矩陣中:n、o、a代表了外掛物模型理論質(zhì)心相對于風洞固定坐標系的姿態(tài);p則代表了外掛物模型理論質(zhì)心在風洞固定坐標系中的位置。
姿態(tài)廣義坐標有多種描述方法[8],在風洞捕獲實驗中采用的是y-z-x歐拉角,得到的姿態(tài)矩陣為
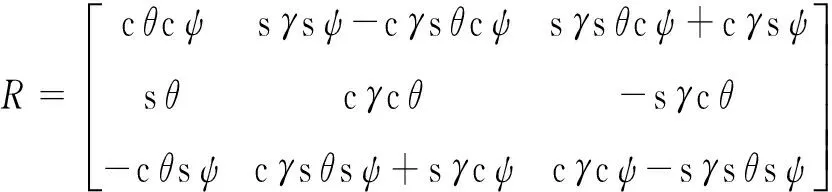
(3)
式中:cθ=cosθ,sθ=sinθ,cψ=cosψ,sψ=sinψ,cγ=cosγ,sγ=sinγ。
由此可見,給定歐拉角也可以求旋轉矩陣,同樣,給定旋轉矩陣可以求出相應的歐拉角。
ψ=atan2(-nz,nx)
(4)
所以,給定任意關節(jié)位移(d1,d2,θ3,d4,θ5,θ6),可以唯一確定gTw,則外掛物模型在風洞中的位置r=(px,py,pz),姿態(tài)采用y-z-x歐拉角表示,φ=(ψ,θ,γ)。
1.3 分離體機構運動學逆解
捕獲軌跡實驗,需要根據(jù)末端外掛物模型的位姿來求解六自由度分離體機構各關節(jié)的位置,然后由電機驅動機構運動,最終使得末端外掛物模型到達指定的位姿,這屬于運動學求逆問題[9]。實驗時,由程序快速計算出捕獲軌跡的位姿,此時模型的姿態(tài)矩陣n、o、a和位置向量p已知,因此有位姿矩陣:
(5)
令式(6)、(7)中對應元素相等,有:
(8)
d4=py-a1-y0+a2y1+oyx1-nyz1-a5s5
(9)

(10)
(11)
d1=pz-z0+azy1+ozx1-nzz1-d5s3-α+a2+a3c3-a4c3-α-a5c5c3-α
(12)
d2=px-x0+axy1+oxx1-nxz1+d5c3-α+a3s3-a4s3-α-a5c5s3-α
(13)
從式(8)~(13)可以看出:分離體機構的3個轉角的角位移只與模型的姿態(tài)有關,而線位移既跟模型的位置有關也與模型的姿態(tài)有關。逆解中,除了θ5有2個解,其他關節(jié)位移都有唯一解,如果對θ5取值范圍做出規(guī)定,那么就可以唯一確定位姿和關節(jié)位移的對應關系。
2 分離體機構運動學仿真
分離體機構初始時刻處于零位狀態(tài),該位置的關節(jié)位移值為分離體機構各關節(jié)變量的初始值,取值為(517,-407,90,1302,-90,0)。在運動過程中,分離體機構的各關節(jié)實際位移是各個關節(jié)變量在初始值上的增加,所以代入矩陣運算中的位移值是分離體機構在各個位置相對于零位的位移加上零位時的初始值。因此,分離體機構關節(jié)1至關節(jié)6的位移值分別為(517+d1,-407+d2,90+θ3,1302+d4,-90+θ5,θ6)。
使用Matlab編寫分離體機構運動學程序,其中連桿參數(shù)取值如下:a1=279,a2=622,a3=658,a4=637,a5=0,d5=165,α=arctan(165/658),(x0,y0,z0)=(-1 000, 1 023, 105),(x1,y1,z1)=(0,0,100)。
關節(jié)輸入中變量取值如下:
(14)
利用Matlab編寫運動學程序仿真,仿真時間為12 s,仿真結果見圖2、3。

圖2 Matlab下外掛物位置
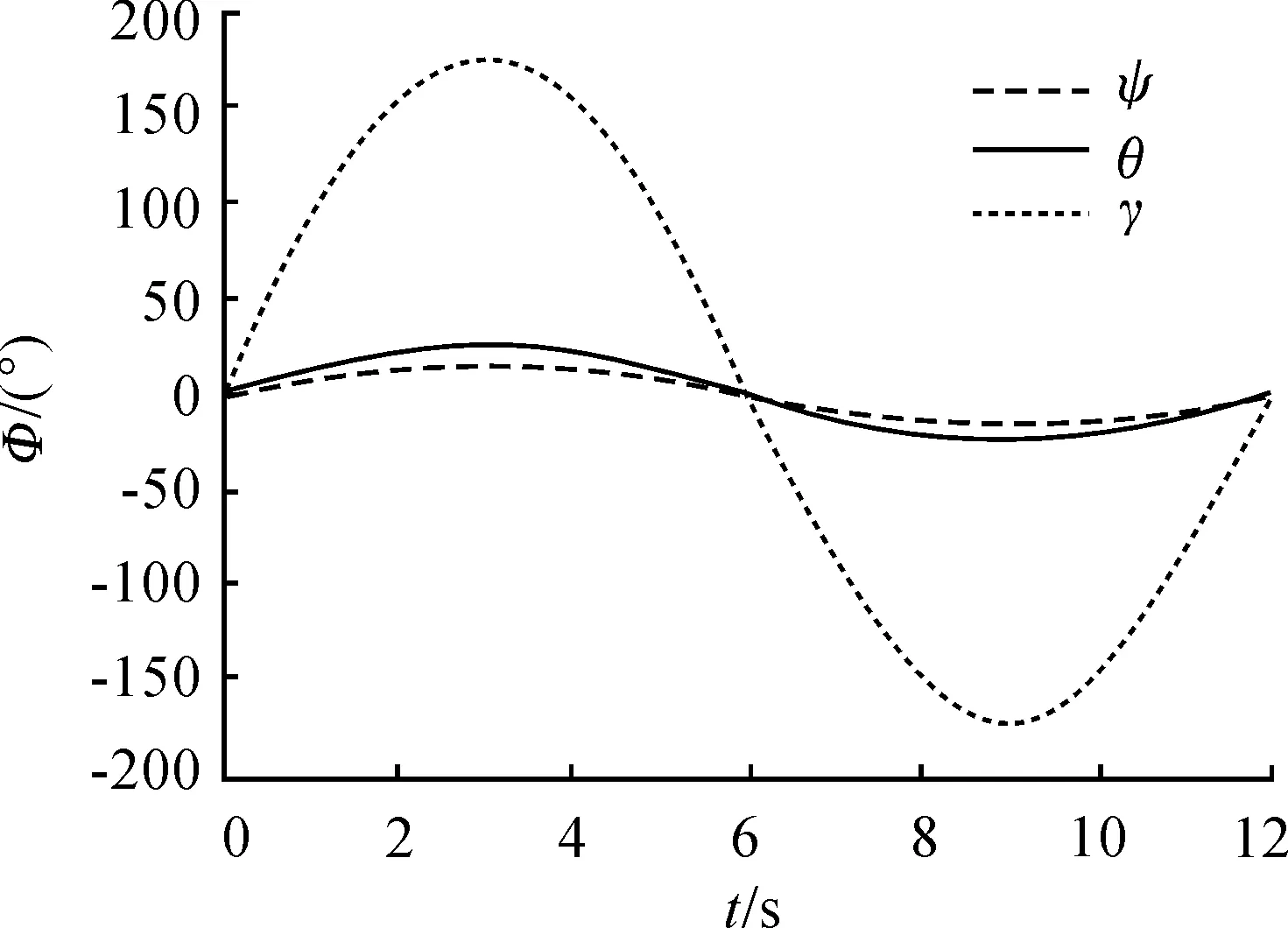
圖3 Matlab下外掛物姿態(tài)
將模型導入ADAMS,利用ADAMS進行運動學仿真[10],驅動輸入值同式(14),仿真時間為12s,仿真結果見圖4、5。
對比Matlab和ADAMS得到的位移、姿態(tài)曲線圖可發(fā)現(xiàn):兩種計算所得結果十分吻合。
此外,為驗證正逆解運算過程是否可逆,在Matlab軟件GUI中,分別編寫運動學正逆解界面。正解給定任意一組關節(jié)位移作為輸入,計算外掛物模型理論質(zhì)心在風動固定坐標系中的位姿,逆解輸入正解所得位姿,計算各關節(jié)位移,結果見圖6、7。

圖4 ADAMS下外掛物位置
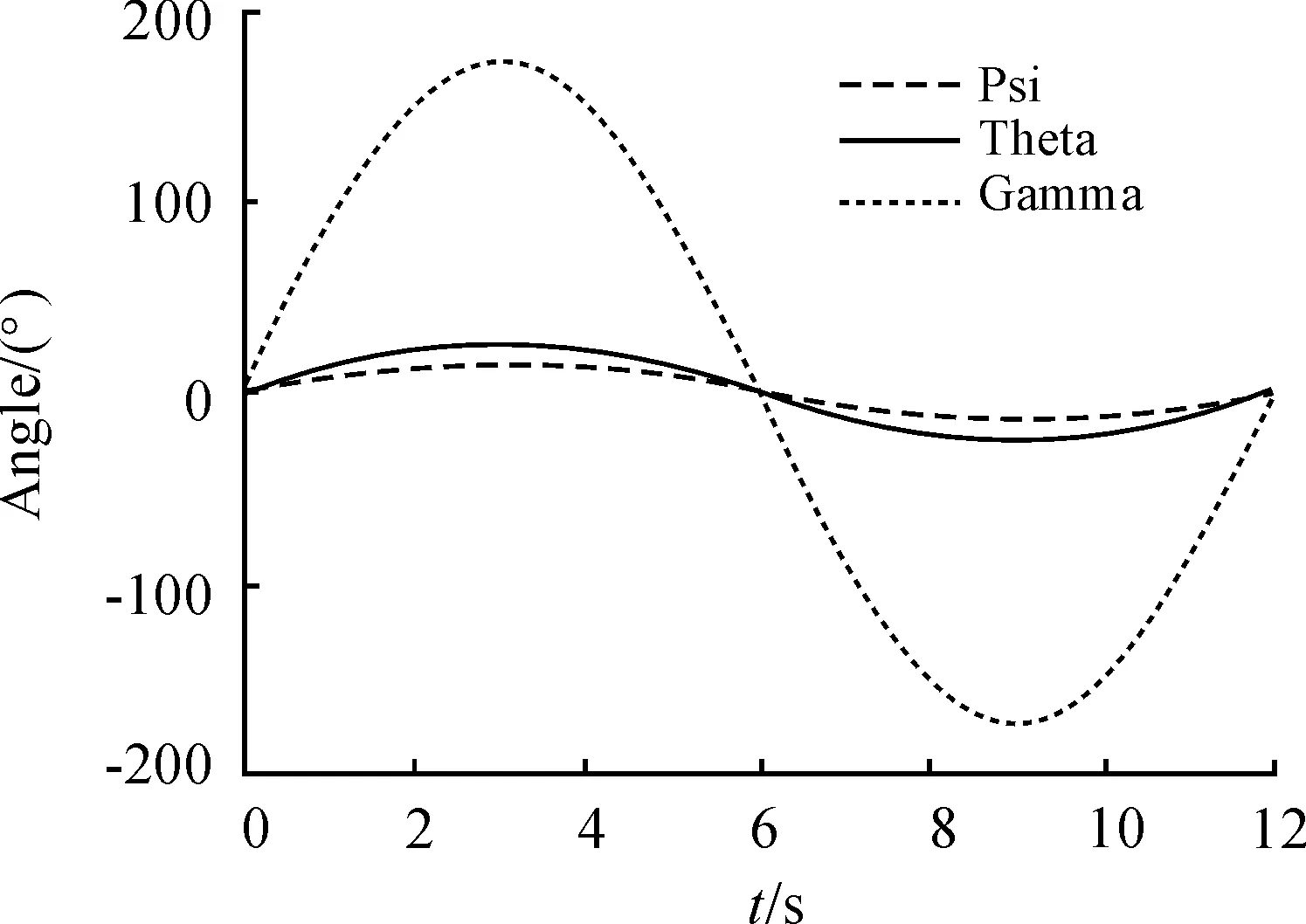
圖5 ADAMS下外掛物姿態(tài)

圖6 運動學正解
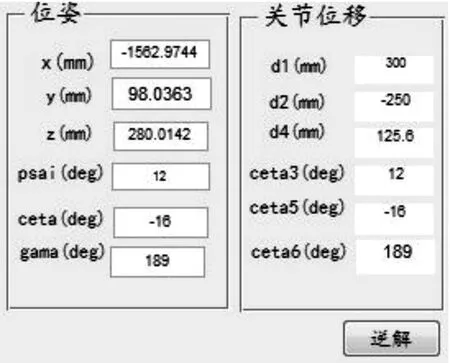
圖7 運動學逆解
由圖7可見:逆解得到的關節(jié)位移與正解輸入的關節(jié)位移完全相同,證明正逆解運算過程是可逆的。
3 結束語
本文利用D-H方法,建立了六自由度分離體機構的連桿簡圖,得到D-H參數(shù),通過矩陣變換得到運動學正解,并利用變量分離法得到運動學逆解。最后利用Matlab編程計算,并與在ADAMS中運動學仿真得到的結果進行比較,驗證了理論推導的正確性,確保了計算結果的準確性和可靠性。風洞捕獲軌跡試驗需要給定末端外掛物模型的位姿,然后由逆解計算關節(jié)位移,驅動機構運動,最終使得機構到達給定的位姿。因此,本文運動學分析為捕獲軌跡試驗的順利進行提供了保障,也為后續(xù)工作空間的規(guī)劃和機構的誤差補償工作奠定了基礎。
[1] 譚興強,謝志江,岳茂雄.CTS實驗六自由度機械手快速跟蹤插補控制方法研究[J].現(xiàn)代科學儀器,2012(3):25-29.
[2] 黃敘輝,龐旭東,宋斌.1.2 m跨超聲速風洞新型捕獲軌跡系統(tǒng)研制[J].實驗流體力學,2008,22(2):95-98.
[3] 李周復.風洞特種試驗技術[M].北京:航空工業(yè)出版社,2010.
[4] 董生權,丁亮,尤波,等.基于PMAC的SCARA機器人運動控制研究[J].重慶工學院學報,2005,19(11):51-54.
[5] 黃志杰.分離體機構運動學和動力學分析[D].重慶:重慶大學,2014.
[6] 蘇豪,薛方正.關節(jié)型機器人通用仿真平臺設計[J].重慶理工大學學報(自然科學),2012,26(6):82-88.
[7] 程立艷,費凌,蘇澤郎.基于MATLAB五自由度機械手運動學仿真分析[J].機械研究與應用,2011(4):12-14.
[8] 龔星如.六自由度工業(yè)機器人運動學標定的研究[D].南京:南京航空航天大學,2012.
[9] 趙獻丹,趙虎.六自由度串聯(lián)機械手運動學逆解研究[J].現(xiàn)代制造技術與裝備2010(3):11.
[10]余曉流,劉進福,汪麗芳,等.基于ADAMS的六自由度焊接機器人運動學分析及仿真[J].安徽工業(yè)大學學報(自然科學版),2012,29(1):49-53.
(責任編輯 陳 艷)
Kinematics Analysis and Simulation of a 6-DOF Separation Mechanism
GOU Shuang-shuang, JIAN Kai-lin
(College of Aerospace Engineering, Chongqing University, Chongqing 400044, China)
According to the structure and motion features of the 6-DOF separation mechanism of the Captive Trajectory System, based on the theory of robot D-H method, the link frames and the kinematic parameters of separation mechanism were gotten and the kinematic model was built. The forward kinematics solution was derived by using matrix transformation method, and the pose relation between the tail sting coordinate system and base coordinate system of the separation mechanism was changed into the pose relation between the store coordinate system and the wind tunnel fixed coordinate system by using transformation matrix, and then the separation of variable was used to solve the inverse kinematics solution. Finally, through the Matlab software program, the results obtained with the ADAMS software kinematics simulation results were compared to verify the correctness of the theoretical derivation.
separation mechanism; kinematics; forward and inverse solution; D-H transform; simulation analysis
2017-01-03 基金項目:國家自然科學基金委員會和中國工程物理研究院聯(lián)合基金資助項目(11176035)
緱雙雙(1991—),女,陜西渭南人,碩士研究生,主要從事結構設計及其優(yōu)化研究,E-mail:goushuangs@163.com。
緱雙雙,蹇開林.一種六自由度分離體機構運動學分析及仿真[J].重慶理工大學學報(自然科學),2017(5):43-48.
format:GOU Shuang-shuang,JIAN Kai-lin.Kinematics Analysis and Simulation of a 6-DOF Separation Mechanism[J].Journal of Chongqing University of Technology(Natural Science),2017(5):43-48.
10.3969/j.issn.1674-8425(z).2017.05.008
V211.72;TH113.2+2
A
1674-8425(2017)05-0043-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
