3SCJ-2型水田行間除草機設計與試驗
2017-06-27 08:12:06王金峰王金武閆東偉周文琪
農業機械學報 2017年6期
王金峰 王金武 閆東偉 唐 漢 周文琪
(東北農業大學工程學院, 哈爾濱 150030)
3SCJ-2型水田行間除草機設計與試驗
王金峰 王金武 閆東偉 唐 漢 周文琪
(東北農業大學工程學院, 哈爾濱 150030)
為減少除草劑對稻米品質的影響和解決人工除草勞動強度大的問題,設計了一種水田行間除草機。除草機采用主、被動除草輪旋轉將雜草埋壓和挑出。建立關鍵部件結構模型,通過對水稻秧苗和雜草根系特點進行分析,得出主動除草輪半徑、寬度、轉速、耙齒等結構參數的計算公式,得出被動除草輪和限深板結構參數的設計依據;建立主動除草輪、被動除草輪、機架和限深板的力學模型,推導出主動除草輪的驅動力矩。根據結構模型、力學模型的分析結果和農藝技術指標要求,確定了主動除草輪半徑為0.15 m,被動除草輪半徑為0.1 m,主動除草輪轉速為0.6 r/s,耙齒數量為6,耙齒長度為0.12 m,驅動力矩為27 N·m。 對設計的水田行間除草機進行田間試驗和性能檢測,結果表明,除草率為78%,達到農藝技術指標的要求。
水田; 行間除草機; 除草輪; 設計; 試驗
引言
在水稻種植過程中,減少除草劑和農藥的使用量,是提高水稻品質和保證水稻安全的主要途徑。為減少除草劑的使用,采用機械除草是最省時省力的方式[1]。
對于機械除草技術的研究,日本處于領先水平,除草機具可分為乘坐式和步進式:乘坐式除草機工作時通過動力驅動高速轉動的耘鋤或耙齒除去行間雜草,沿機具前進方向左右擺動的梳齒或驅動對轉的株間除草器除去株間雜草;步進式除草機通過行走輪或行間隨動除草輪除去行間雜草,通過株間對轉式除草器完成株間雜草的去除工作[2-8]。中國在機械除草方面起步較晚,東北農業大學研制并通過行間隨動除草輥除去行間雜草,驅動鋼絲軟軸帶動彈齒爪盤除去株間雜草的除草機[9]。華南農業大學研制了靠耙齒式除草輪的高速旋轉除掉行間雜草的除草機[10-11]。目前,中國的一些中小企業也進行除草機的研制,主要形式是驅動行走除草輪除去行間雜草,但除草效果并不理想。
中國和日本的土質不同,中國不同省份和地區的土質差別也很大[12],另外,中國水田邊緣處不具有除草機轉向的區域,日本的乘坐式除草機和寬幅步進式除草機在轉向時會出現不同程度的壓苗現象,因此,日本的水田除草機并不適合在中國各地區作業,而結構緊湊、質量輕的單行和雙行除草機更適合在中國作業。隨著優質米需求量的日益增加,水稻種植戶對水田除草機的需求也增加,亟需研制適合中國不同地區和不同土壤作業的水田除草機具[13]。本文以黑龍江省黑土為作業對象,進行水田除草機主要參數的確定,設計適合黑龍江省作業的除草機具。
1 除草的農藝要求
黑龍江省種植水稻為一季稻,根據積溫不同,種植時間略有不同。第三、四積溫帶在5月10日左右,氣溫12℃以上時進行插秧,插秧后返青期長,可在插秧后10~20 d進行除草作業;第一、二積溫帶可在5月中下旬,氣溫15℃以上時進行插秧,插秧后氣溫高,光照足,雜草生長迅速,最佳除草時間為插秧后7~20 d。除草時,泥土深度0.18~0.20 m,返青后控水,泥漿層深度0.02~0.05 m,水稻行間間距0.3 m,株間間距0.12 m,行間除草作業速度低于0.67 m/s,除草率大于75%[14]。
2 整機結構與工作原理
雙行水田除草機是一種專門用于水田行間除草作業的輕簡化農業機械,結構緊湊,質量輕,可以單手拉起,主要由發動機、主變速箱、側傳動箱、主動除草輪、被動除草輪、限深板和機架等組成。其中主動除草輪和被動除草輪為主要工作部件,結構如圖1所示。
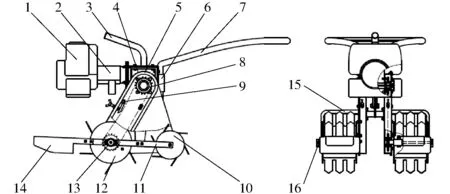
圖1 雙行水田除草機結構簡圖Fig.1 Structure diagram of double row weeding machine for paddy field1.發動機 2.發動機變速箱 3.提拉手柄 4.主變速箱 5.側傳動箱 6.機架 7.扶手 8.上鏈輪 9.張緊機構 10.被動除草輪 11.連接板 12.主動除草輪 13.下鏈輪 14.限深板 15.支撐板 16.菱形軸承座
發動機和發動機變速箱與主變速箱連接,主變速箱的左右兩側分別安裝側傳動箱,側傳動箱由等齒數的上鏈輪和下鏈輪通過鏈條構成。主動除草輪一端與下鏈輪輪軸通過螺栓連接,另一端與菱形軸承座鉸接,菱形軸承座安裝在連接板上,連接板與焊接在側傳動箱上的支撐板固結。被動除草輪和限深板兩端分別與連接板和機架連接。主變速箱、側傳動箱、提拉手柄、扶手均與機架連接。
工作時,除草機動力由發動機提供,通過發動機變速箱和蝸輪蝸桿主變速箱將動力傳到側傳動箱,經側傳動箱的鏈傳動帶動主動除草輪工作。轉動張緊輪的調節螺母可調節傳動鏈條的松緊程度。主動除草輪在轉動時除去行間雜草,并帶動除草機行走,被動除草輪在泥土摩擦力的作業下轉動,進一步除去行間雜草。
3 關鍵部件設計
3.1 關鍵部件工作機理
水稻秧苗根系由主根和次生根組成,形成橢圓狀的粗壯根系,受到外力時變形較小,插秧7~20 d根部深度0.07~0.15 m,寬度0.1~0.2 m;雜草沒有分蘗,根系只有主根,插秧7~20 d根部深度僅有0.03~0.05 m[9]。圖2中的水稻秧苗和雜草為插秧后7~10 d時的狀態,此時可進行除草作業。如圖2所示,雙行除草機關鍵部件包括主動除草輪、被動除草輪和限深板。主動除草輪的除草耙齒入土和出土時,能夠壓實和挑動土壤,將行間雜草埋壓于土壤之中或挑出于土壤之外,使雜草無法光合作用或扎根,達到除草目的。被動除草輪的除草耙齒作用與主動除草輪除草耙齒相同,具有輔助除草和限制主動除草輪工作位置作用。限深板能夠碾壓雜草,限制主動除草輪位置,具有防止機具下陷和保持機具行走穩定的作用[15-18]。在除草作業時,增加了水稻苗側土壤的疏松程度,有利于滲水和透氣,促進水稻生長發育。
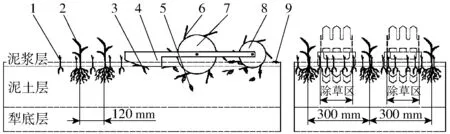
圖2 關鍵部件工作狀態Fig.2 Working state of key components1.雜草 2.水稻秧苗 3.被碾壓的雜草 4.限深板 5.被埋壓的雜草 6.除草耙齒 7.主動除草輪 8.被動除草輪 9.被挑出的雜草
3.2 主動除草輪結構設計
主動除草輪由耙齒、除草輪軸和輪盤鉚接而成,如圖3所示。由于主動除草輪承擔大部分的除草作業,為獲得較好的除草效果,本文對主動除草輪的半徑、寬度、轉速以及除草耙齒長度、數量、安裝位置進行設計。
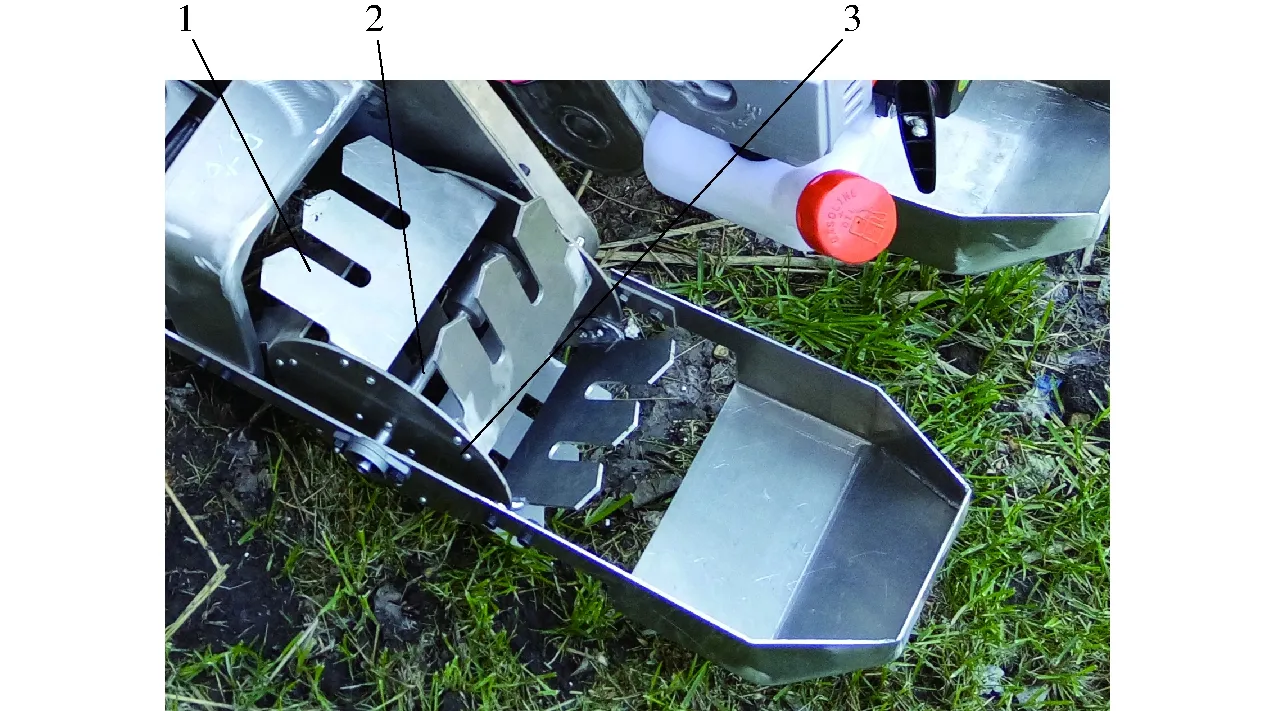
圖3 主動除草輪實物圖Fig.3 Photo of driving weeding wheel1.耙齒 2.除草輪軸 3.輪盤
3.2.1 主動除草輪半徑
主動除草輪動力由鏈傳動傳遞,設計的主動除草輪半徑既要保證有效除去雜草,又要防止側傳動箱底部與泥土接觸而增大阻力,如圖4所示。

圖4 主動除草輪結構Fig.4 Structure of driving weeding wheel
設計主動除草輪回轉軸線與側傳動箱底部距離為a,限深板和被動除草輪限定主動除草輪除草深度,并使側傳動箱底部與泥面的距離為c,主動除草輪泥面以下部分長度為h,則主動除草輪無滑轉時的滾動半徑rw為
rw=a+c+h
(1)
為保證傳動平穩,鏈輪直徑不宜過小,設計a為0.05 m,c為0.01~0.02 m。根據雜草根系的長度0.03~0.05 m,為有效除去雜草,減小滑轉,主動除草輪在泥面以下部分長度應大于雜草根系的長度,設計h為0.07~0.08 m,由式(1)確定rw為0.13~0.15 m。
3.2.2 耙齒長度、數量和安裝位置
主動除草輪在田間作業時,為減少磨損與功率消耗,保證作業質量,應該使主動除草輪處于純滾動狀態,但由于泥土條件變化,主動除草輪不可避免地會出現滑轉[19]。主動除草輪的滑轉程度用滑轉率δ表示,為
(2)
其中
vl=rwω
(3)
v=rω
(4)
式中vl——主動除草輪的理論速度,m/sv——主動除草輪的實際速度(主動除草輪輪心平移的速度),m/s
ω——主動除草輪角速度,rad/s
r——主動除草輪滾動半徑,m
S——主動除草輪旋轉一周機具行走距離
由式(2)~(4)可得
S=2πrw(1-δ)
(5)
如圖4所示,若作業時不漏除草,除草輪所有耙齒長度之和應大于或等于除草輪旋轉一周機具行走距離,即
bZ≥2πrw(1-δ)
(6)
式中b——耙齒長度,mZ——耙齒數量
為保證主動除草輪在工作時不被泥土堵住,耙齒不能太多,由式(6)可知,耙齒多,耙齒長度可以變短,但滑轉率會增加;耙齒少,除草機工作平穩性變差。綜合考慮,選取耙齒數量Z為6,耙齒長度b為
(7)
為保證整片耙齒完全工作,耙齒入土時應與泥面完全貼合,如圖4所示AB段的耙齒。耙齒和輪盤鉚接而成,設計時要確定耙齒和輪盤的位置,即確定OC和BC的長度。
在△OAC中,lOC=a+c。由
(8)
(9)
得
(10)
3.2.3 主動除草輪的寬度和轉速
水稻秧苗行距0.3 m,插秧7~10 d除草期間,水稻秧苗的根系寬度為0.1 m。為減少除草機在緩苗后對水稻秧苗的損傷,同時考慮主變速箱和側傳動箱的設計寬度,主動除草輪的設計寬度為0.15~0.18 m。
主動除草輪的動力由發動機提供,為選擇發動機類型和主變速箱的傳動比,需要確定除草輪的轉速,根據農藝要求,除草機的作業速度(主動除草輪輪心平移的速度)v低于0.67 m/s,由式(4)、(5)可知主動除草輪的角速度ω為
(11)
主動除草輪的轉速n為
(12)
3.3 被動除草輪和限深板結構設計
被動除草輪是靠泥土對耙齒的摩擦力驅動除草輪旋轉,具有輔助除草和限制主動除草輪工作位置的作用,其結構與主動除草輪相似。工作時,被動除草輪回轉軸線與主動除草輪回轉軸線在同一平面上,并與泥面平行,在泥面以下的設計長度l與雜草長度相等。被動除草輪(無滑轉、無滑移)的滾動半徑rv為
rv=a+c+l
(13)
被動除草輪寬度與主動除草輪寬度相同,被動除草輪轉速與其運動狀態相關,被動除草輪耙齒的數量和安裝角度設計方法與主動除草輪相似,耙齒長度在保證滾動半徑rv以及入土時與泥面完全貼合的前提下,可適當調整。
限深板能夠碾壓雜草,限制主動除草輪位置,起到防止機具下陷和保持機具行走穩定的作用。限深板底面與泥面接觸,限深板上面與主動除草輪和被動除草輪回轉軸線在同一平面即可。限深板寬度與主動除草輪寬度相同。為減小除草機的工作阻力,限深板設計長度和限深板的寬度相同,與泥面接觸長度為限深板長度的1/2即可。
4 除草機受力分析
除草機與泥土接觸的部件為主動除草輪、被動除草輪和限深板。為選擇發動機和主變速箱的類型,還需要確定除草機的驅動力矩,因此,本文將對主動除草輪、被動除草輪、機架和限深板(發動機、發動機變速箱、主變速箱、側傳動箱、機架、限深板作為一個整體為研究對象,簡稱“機架和限深板”)進行受力分析,如圖5所示。
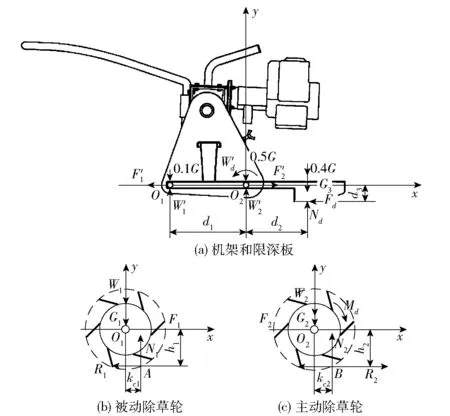
圖5 關鍵部件受力分析Fig.5 Force analysis of key components
設除草機前行走方向與x軸正方向相同,被動除草輪鉸鏈點O1與主動除草輪鉸鏈點O2的距離為d1,限深板質心點與主動除草輪鉸鏈點O2的距離為d2,機架(包括發動機、發動機變速箱、主變速箱、側傳動箱和機架)的重力為G,鉸鏈點O1、O2和限深板質心所分配的重力分別為0.1G、0.5G和0.4G,如圖5a所示。
主動除草輪和被動除草輪入土部分受到泥土法向力的作用,同時受到泥土摩擦力的作用。法向力和摩擦力隨泥土性能、除草輪形狀和位置不同而變化,合力作用點的位置也可能變化[19]。由于耙齒對泥面的垂直擠壓發生在第四象限,可以確定合力作用點是在第四象限某處。假設圖5b的A點和圖5c的B是合力的作用點,將此力分解為水平分力R和垂直分力N。
如圖5c所示,當主動除草輪做勻速運動時,力的平衡方程為
∑Fx=R2-F2=0
(14)
∑Fy=N2-W2-G2=0
(15)
∑MO2=N2kc2+R2h2-Md=0
(16)
式中R2——泥土合力對主動除草輪的作用力在x軸方向分力,N
F2——主動除草輪牽引的機架對主動除草輪的作用力,N
N2——泥土合力對主動除草輪的作用力在y軸方向分力,N
Md——驅動力矩,N·m
W2——機架和限深板對鉸鏈點O2的載荷,N
G2——主動除草輪的重力,N
kc2——合力作用點B與y軸的距離,mm
h2——合力作用點B與x軸的距離,mm
如圖5b所示,當被動除草輪做勻速運動時,力的平衡方程為
∑Fx=F1-R1=0
(17)
∑Fy=N1-W1-G1=0
(18)
∑MO1=N1kc1-R1h1=0
(19)
式中R1——泥土合力對被動除草輪的作用力在x軸方向分力,NF1——機架和限深板對被動除草輪的拉力,N
N1——泥土合力對被動除草輪的作用力在y軸方向分力,N
W1——機架和限深板對鉸鏈點O1的載荷,N
G1——被動除草輪的重力,N
kc1——合力作用點A與y軸的距離,mm
h1——合力作用點A與x軸的距離,mm
如圖5a所示,當機架和限深板做勻速運動時,力的平衡方程為
∑Fx=F′2-F′1-Fd=0
(20)
∑Fy=W′1+W′2+Nd-G3-G=0
(21)
∑MO2=0.1Gd1+Ndd2+M′d-
W′1d1-Fdd3-(G3+0.4G)d2=0
(22)
式中F′1——被動除草輪對機架的拉力,NF′2——主動除草輪牽引機架的作用力,N
Fd——泥土對限深板的摩擦力,N
W′1——被動除草輪對鉸鏈點O1的載荷,N
W′2——主動除草輪對鉸鏈點O2的載荷,N
Nd——泥土對限深板的載荷,N
G3——限深板重力,N
G——機架重力,N
M′d——驅動力矩對鉸鏈點O2的反作用力矩,N·m
式(14)~(22)中,W1=W′1,W2=W′2,F1=F′1,F2=F′2,R1=fr1N1,R2=fr2N2,Fd=μNd,fr1和fr2為滾動摩擦因數,μ為滑動摩擦因數。
選取R2最大時,設計除草機的驅動力矩。
假設fr1=fr2=μ=1,則R1=N1,R2=N2,Fd=Nd,將式(15)代入式(16)得
Md=(W2+G2)(kc2+h2)
(23)
由式(20)、(21)、(14)、(17)、(15)、(18)得
Fd=F′2-F′1=F2-F1=R2-R1=
N2-N1=G2+W2-(G1+W1)
(24)
Nd=G+G3-W′1-W′2=
G+G3-W1-W2
(25)
由于Fd=Nd,由式(24)、(25)解得
(26)
將式(26)代入式(23)得
(27)
(28)
式中,G+G1+G2+G3為除草機整機重力。
5 除草機主要參數確定
設計主動除草輪回轉軸線與側傳動箱底部距離a為0.05 m,側傳動箱底部與泥面距離c為0.02 m,主動除草輪泥面以下部分長度h為0.08 m,由式(1)可知,主動除草輪無滑轉時滾動半徑rw為0.15 m。被動除草輪泥面以下部分長度l為0.03 m,由式(13)可知,被動除草輪無滑轉、無滑移時的滾動半徑rv為0.1 m。
由于農業機械在田間作業時的行走輪滑轉率為3%~8%,水田作業機具主動輪滑轉率會超過15%,以致浪費動力[20-26]。設計最大滑轉率δ為20%,耙齒數量Z為6,由式(7)、(10)得出主動除草輪耙齒長度b為0.12 m,耙齒安裝位置OC長度為0.08 m,BC長度為0.01 m。
雙行除草機要求結構緊湊,質量輕,可以單手拉起,設計整機質量為26 kg,由式(28)可知,設計的驅動力矩Mdmax為27 N·m。
除草機由1.25 kW單缸二沖程發動機提供動力,發動機轉速120 r/s,發動機變速箱傳動比為1∶20,將農藝要求的最大作業速度代入式(12),確定主動除草輪的轉速,從而確定主變速箱的傳動比為1∶7.2。主變速箱采用RV40蝸輪蝸桿減速器,傳動比可選擇1∶7.5,1∶10,1∶20,…,1∶100,主變速箱選擇1∶7.5的傳動比,蝸輪輸出力矩小于27 N·m,不滿足設計要求,主變速箱選擇傳動比1∶10,蝸輪輸出力矩滿足設計要求。選擇傳動比1∶10的RV40蝸輪蝸桿減速器為主變速箱,除草機發動機在額定功率下工作時,主動除草輪的轉速n為0.6 r/s,由式(12)可知,當滑轉率δ為3%~20%,除草機的作業速度v為0.45~0.55 m/s,滿足農藝要求。
根據主動除草輪和被動除草輪的半徑,設計主動除草輪鉸鏈點O2與被動除草輪鉸鏈點O1的距離d1為0.28 m,限深板質心處與主動除草輪鉸鏈點O2的距離d2為0.28 m,則被動除草輪鉸鏈點O1處分配的機架重力和限深板質心處分配的機架重力應該相等。如圖5a所示,由于機架鉸鏈點O2處受到驅動力矩的反作用力矩M′d,使得機架在行走時有繞鉸鏈點O2向被動除草輪方向旋轉的趨勢,因此,設計時應保證限深板質心處分配的重力多一些,用于平衡M′d,即機架(包括發動機、發動機變速箱、主變速箱、側傳動箱和機架)的重心應在機架鉸鏈點O2與限深板質心之間。設計限深板質心處分配的重力為Gx,則M′d=Gxd2,求出Gx為96 N,約為0.4G。
雙行除草機采用鋁合金材料,設計整機質量為26 kg,主動除草輪質量0.9 kg,被動除草輪質量0.6 kg,限深板質量0.5 kg,機架質量22 kg(發動機和發動機變速箱質量約8 kg,主變速箱RV40質量3 kg,側傳動箱和機架質量10 kg)。
6 試驗結果與分析
2016年5月25日,在黑龍江省哈爾濱市新鄉試驗田進行田間試驗,同時黑龍江農墾農業機械試驗鑒定站對3SCJ-2型水田除草機除草效果進行田間檢測,如圖6所示。

圖6 雙行水田除草機田間作業性能檢測Fig.6 Performance test of double row paddy field weeding machine in field
試驗田塊面積約為0.1 hm2,泥漿層深度為0.03 m,泥土層深度0.15~0.18 m,水稻秧苗的平均高度為0.2 m,行距為0.3 m,株距為0.12 m。雜草的平均高度為0.04~0.06 m。試驗時選取田塊尺寸為1 m×1 m的區域為測試區域,各測試區域在田內均勻分布。
除草作業速度和主動除草輪轉速是影響除草效果的重要指標,而除草機是通過主動除草輪轉動驅動除草機行走,田間試驗時除草作業速度和主動除草輪轉速是同一個指標。除草率為已除雜草占雜草總數的百分比(測試區域內雜草根莖被拉斷、翻埋、飄起均為已除雜草,雜草根與泥面連接,可以繼續生長的雜草為未除雜草),除草前統計各測區雜草的數量,除草試驗完成后,用細繩將測試區圍住,統計已除雜草和未除雜草數量,每組數據采集3次,取平均值。通過測試區域的試驗指標估計整體指標[9]。田間試驗選擇除草作業速度為試驗因子,選擇除草率作為評價水田除草機除草效果的性能指標,分析除草作業速度對除草率的影響,試驗結果如表1所示。

表1 不同除草作業速度下的除草率
根據表1的試驗數據,應用Design-Expert得出除草率的方差分析結果如表2所示。
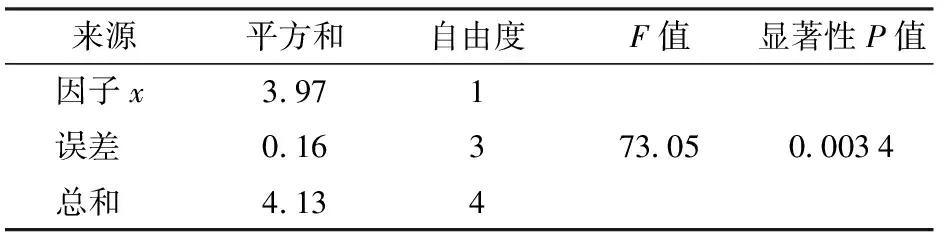
表2 除草作業速度對除草率影響的方差分析
由表2可知,顯著性P值小于0.05,說明模型顯著。在該情況下,x是有效的模型項。擬合出除草作業速度對除草率影響的回歸方程為
y=-12.6x+84.71
(29)
由圖7可知,除草率隨除草作業速度的增加有減小的趨勢。除草機發動機變速箱、主變速箱和側傳動箱傳動比已確定,當發動機轉速高于離合器結合轉速時開始工作,所以離合器結合時的速度是除草最低作業速度,該速度為0.35 m/s;當發動機在額定功率下工作時,除草作業速度為0.50 m/s;當發動機在最大功率工作時,除草作業速度為0.55 m/s。田間試驗結果表明:除草機的除草率為78.0%~80.5%。除草作業前后效果如圖8所示。
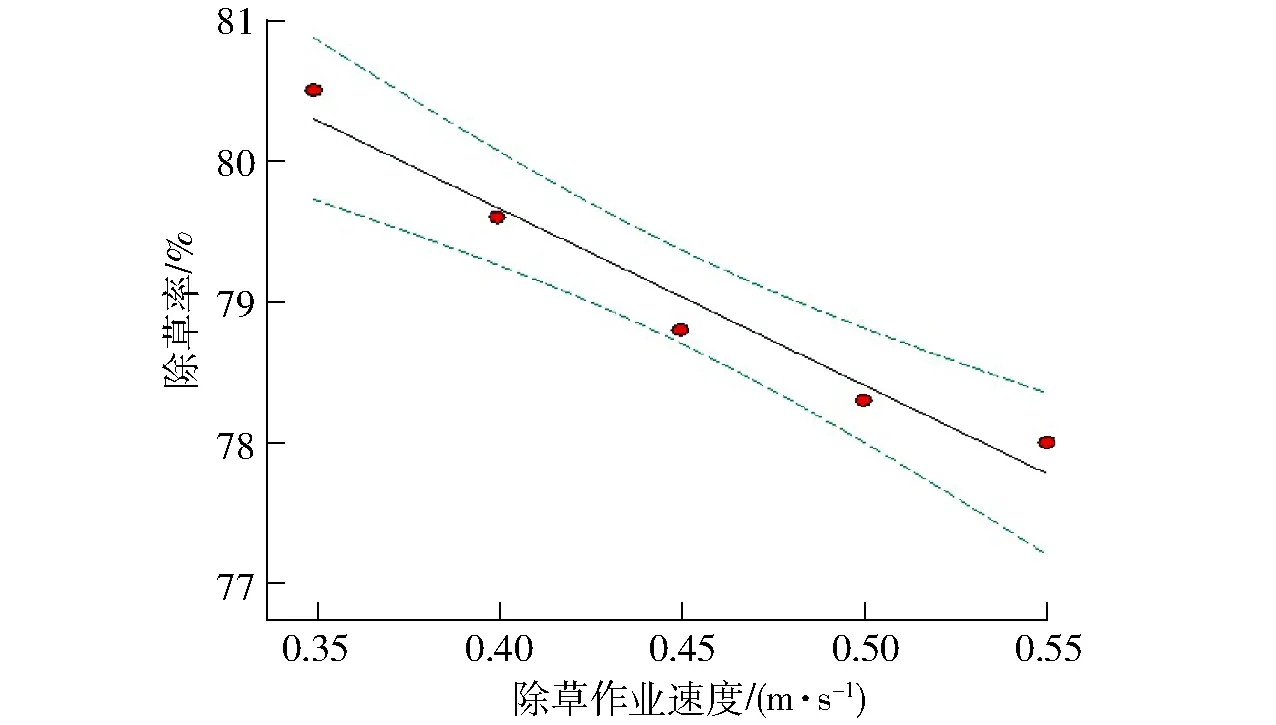
圖7 除草作業速度對除草率的影響Fig.7 Influence of forward velocity on weeding rate for weeding machine

圖8 除草作業前后對比Fig.8 Weeding contrast before and after operation in field1.除草前 2.除草后
黑龍江農墾農業機械試驗鑒定站對3SCJ-2型水田除草機除草效果進行田間檢測結果如表3所示。檢測結果表明,除草率達到農藝技術指標的要求。除草作業時,還應注意如下問題:
(1)除草機發動機轉速升到離合器結合轉速以上時開始工作,開、停、快、慢均由油門控制。除草作業時,一般油門控制在80%左右;行走到地頭時不需要控制除草機轉向,只需關閉油門,拉起提拉手柄,人工實現除草機轉向。
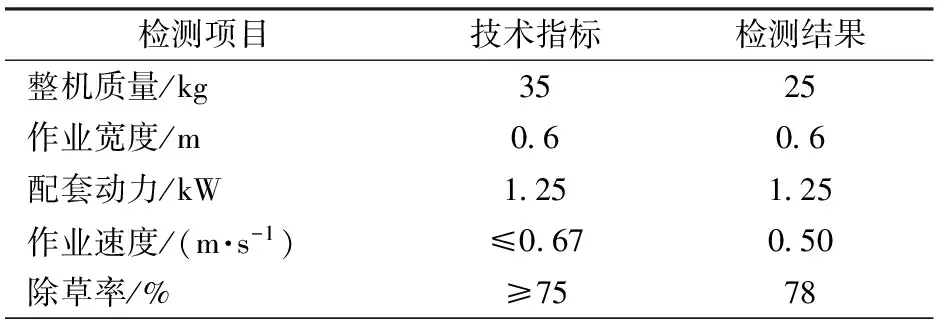
表3 雙行水田除草機田間作業性能檢測結果
(2)除草機的除草位置通過扶手來調整,當苗行不直時,可按壓扶手,翹起限深板,同時移動扶手位置,使得苗行重新對正。
(3)由于除草輪寬度為0.18 m,在除草作業時,通過調整除草機扶手,不會出現傷苗現象,但水稻秧苗株間附近的雜草無法除去。
(4)在水稻生長周期內,需要進行3次除草,插秧后7~10 d進行第1次除草,插秧后14 d進行第2次除草。本文設計的行間除草機可以滿足前兩次的除草要求,每次除草率為78%,已經達到農藝的技術指標,可以大大減小人工除草的勞動強度。在行間除草作業后,一般采用人工除去株間雜草。
7 結論
(1)設計了除草機主動除草輪,通過對水稻秧苗、雜草根系特點的分析和結構要求,確定了主動除草輪半徑、寬度、轉速和耙齒結構等參數。
(2)通過對除草機受力分析,推導出主動除草輪驅動力矩的簡化公式,為除草機的動力分配、發動機和主變速箱的選擇奠定了理論基礎。
(3)根據關鍵部件結構參數的計算公式、受力分析結果和農藝技術指標要求,確定了主動除草輪半徑為0.15 m,被動除草輪半徑為0.1 m,主動除草輪轉速為0.6 r/s,耙齒數量為6,耙齒長度為0.12 m,驅動力矩為27 N·m;選擇了發動機為1.25 kW單缸二沖程發動機,發動機自帶的齒輪變速箱傳動比為1∶20,選擇RV40蝸輪蝸桿減速器為主變速箱。
(4)由田間試驗和性能檢測結果可知,3SCJ-2型除草機作業質量良好,達到農藝技術指標的要求,可較好地完成行間除草作業。
1 胡煉,林潮興,楊偉偉,等.株間除草裝置的除草和避苗狀態切換控制系統設計[J].沈陽農業大學學報,2014,45(3):305-309. HU Lian,LIN Chaoxing,YANG Weiwei,et al.Design of switch controlling system between the state of weeding and avoiding for intra-row weed mechanical control device[J].Journal of Shenyang Agricultural University,2014,45(3):305-309.(in Chinese)
2 西脇健太郎,大谷隆二,中山壯一.機械除草と除草剤の部分散布を組み合わせたハイブリッド除草機[J].農業機械學會誌,2010,72(1):86-92.
3 臼井智彥,伊藤勝浩,大里達朗.水稲栽培における固定式タイン型除草機の除草効果[J].東北雑草研究會,2009(9):38-41.
4 HWANG J B, PARK S T, SONG S B.Variation of weed occurrence and rice yield by using the cultivating weeder for three years in paddy rice[J].Korean Journal of Weed Science,2007,27(4):334-340.
5 REMESAN R, ROOPESH M S, REMYA N, et al. Wet land paddy weeding—a comprehensive comparative study from south India[J].Agricultural Engineering International: the CIGR Journal,2007,9:1-21.
6 TAJUDDIN A A.Development of a power weeder for low landrice[J].Journal of the Institution of Engineers (India),2009,90(6):15-17.
7 TILLETT N D, HAGUE T,GRUNDY A C,et al. Mechanical within-row weed control for transplanted crops using computer vision[J].Biosystems Engineering,2007,99(2):171-178.
8 汪貞,席運官.國內外有機水稻發展現狀及有機稻米品質研究[J].上海農業學報,2014,30(1):103-107. WANG Zhen,XI Yunguan.The development status of organic rice at home and abroad and study on the quality of organic rice[J].Agricultural Shanghai,2014,30(1):103-107.(in Chinese)
9 陶桂香,王金武,周文琪,等.水田株間除草機械除草機理研究與關鍵部件設計[J/OL].農業機械學報,2015,46(11):58-63.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151109&flag=1&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.009. TAO Guixiang,WANG Jinwu,ZHOU Wenqi,et al.Herbicidal mechanism and key components design for paddy weeding device[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(11):58-63.(in Chinese)
10 馬旭,齊龍,梁柏,等.水稻田間機械除草裝備與技術研究現狀及發展趨勢[J].農業工程學報,2011,27(6):162-168. MA Xu,QI Long,LIANG Bai,et al.Present status and prospects of mechanical weeding equipment and technology in paddy field[J].Transactions of the CSAE, 2011, 27(6): 162-168.(in Chinese)
11 齊龍,梁仲維,馬旭,等.耙壓式除草輪與水田土壤作用的流固耦合仿真分析及驗證[J].農業工程學報,2015,31(5):29-36. QI Long,LIANG Zhongwei,MA Xu,et al.Validation and analysis of fluid-structure interaction between rotary harrow weeding roll and paddy soil[J]. Transactions of the CSAE,2015,31(5):29-36.(in Chinese)
12 王金武,唐漢,王金峰,等.指夾式玉米精量排種器導種投送運移機理分析與試驗[J/OL].農業機械學報,2017,48(1):29-37,46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170105&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.005. WANG Jinwu,TANG Han,WANG Jinfeng,et al.Analysis and experiment of guiding and dropping migratory mechanism on pickup finger precision feed metering device for corn[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):29-37,46.(in Chinese)
13 胡煉,羅錫文,林潮興,等.1PJ-4.0型水田激光平地機設計與試驗[J/OL].農業機械學報,2014,45(4):146-151.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140423&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.04.023. HU Lian,LUO Xiwen,LIN Chaoxing,et al.Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(4):146-151.(in Chinese)
14 曹萌萌,李俏,張立友,等.黑龍江省積溫時空變化及積溫帶的重新劃分[J].中國農業氣象,2014,35(5):492-496. CAO Mengmeng,LI Qiao,ZHANG Liyou,et al.Accumulated temperature variation and accumulated temperature rezone in Heilongjiang province[J].Chinese Journal of Agrometeorology,2014,35(5):492-496.(in Chinese)
15 陳振歆,王金武,牛春亮,等.彈齒式苗間除草裝置關鍵部件設計與試驗[J].農業機械學報,2010,41(6):81-86. CHEN Zhenxin, WANG Jinwu, NIU Chunliang,et al.Design and experiment of key components of trash cultivator’s working in paddy rice seeding linges[J].Transactions of the Chinese Society for Agricultural Engineering,2010,41(6):81-86.(in Chinese)
16 張春建,王金武,趙佳樂,等.水田行間除草裝置的設計與試驗[J].東北農業大學學報,2012,43(2):49-53. ZHANG Chunjian,WANG Jinwu,ZHAO Jiale,et al.Design and experimental research on device of weeding between seedlings from paddy fields[J]. Journal of Northeast Agricultural University,2012,43(2):49-53.(in Chinese)
17 魏從梅,王金武,張影微.水田除草關鍵部件扭矩測試試驗研究[J].東北農業大學學報,2012,43(5):87-91. WEI Congmei,WANG Jinwu,ZHANG Yingwei.Study on torque measurement of key components of weed in paddy field[J].Journal of Northeast Agricultural University,2012,43(5):87-91.(in Chinese)
18 王金武,牛春亮,張春建,等.3ZS-150型水稻中耕除草機設計與試驗[J].農業機械學報,2011,42(2):75-79. WANG Jinwu,NIU Chunliang,ZHANG Chunjian,et al.Design and experiment of 3ZS-150 paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(2):75-79.(in Chinese)
19 李西秦,劉冰,齊勁峰.車輪動力半徑與滑轉率的研究[J].拖拉機與農用運輸車,2003(2):17-20.
20 吳崇友,張敏,金誠謙,等.2BYS-6型水田中耕除草機設計與試驗[J].農業機械學報,2009,40(7):51-54. WU Chongyou,ZHANG Min,JIN Chengqian,et al.Design and experiment of 2BYS-6 type paddy weeding-cultivating machine[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(7):51-54.(in Chinese)
21 丁啟朔,葛雙洋,任駿,等.水稻土深松阻力與土壤擾動效果研究[J/OL].農業機械學報,2017,48(1):47-56,63.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170107&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.007. DING Qishuo,GE Shuangyang,REN Jun,et al.Characteristics of subsoiler traction and soil disturbance in paddy soil[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):47-56,63.(in Chinese)
22 張朋舉,張紋,陳樹人,等.八爪式株間機械除草裝置虛擬設計與運動仿[J].農業機械學報,2010,41(4):56-59. ZHANG Pengjun,ZHANG Wen,CHEN Shuren,et al.Design and kinetic simulation for eight claw intra-row mechanical weeding device[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(4):56-59.(in Chinese)23 孫中興,唐力偉,汪偉,等.考慮土壤滑轉流動的柔性履帶應力分布研究[J/OL].農業機械學報,2017,48(1):317-324.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170142&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.042. SUN Zhongxing,TANG Liwei,WANG Wei,et al.Flexible track stress distribution considering slip subsidence[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):317-324.(in Chinese)
24 陸華忠,羅錫文.水田驅動葉輪輪葉下土壤流動特性與動力性能研究[J].農業機械學報,2010,41(7):50-53. LU Huazhong,LUO Xiwen.Rule and dynamic performance under a paddy-field wheel lug[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(7):50-53.(in Chinese)
25 郭俊,姬長英,CHAUDHRY Arslan,等.稻麥秸稈旋耕作業中受力與位移分析[J/OL].農業機械學報,2016,47(10):11-18.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161002&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.10.002. GUO Jun,JI Changying,CHAUDHRY Arslan,et al.Stress and displacement analyses of rice and wheat straws in rotary tillage process[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(10):11-18.(in Chinese)
26 陳子文,張春龍,李偉,等.株間鋤草機器人刀苗信息優化系統設計與試驗[J/OL].農業機械學報,2015,46(9):62-67.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150909&flag=1&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.009. CHEN Ziwen,ZHANG Chunlong,LI Wei,et al.Design and experiment on hoe-crop-positioning optimization system for intra-row weeding robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(9):62-67. (in Chinese)
Design and Experiment of 3SCJ-2 Type Row Weeding Machine for Paddy Field
WANG Jinfeng WANG Jinwu YAN Dongwei TANG Han ZHOU Wenqi
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
With the improvement of people’s living standard, the requirement of rice quality becomes increasingly high. In the process of rice planting, the using amount of herbicide should be reduced. In order to reduce the using amount of herbicide, the mechanical weeding is the most time-saving and force-saving way. Japan is in the leading level for mechanical weeding technology, but the soil conditions are different between Japan and China, even in China, the soil is different for different provinces and areas. In addition, the edges of paddy field do not have steering areas for weeders in China. Therefore, single row and double row weeding machines with compact structure and light weight are more suitable for operation in China. The weeds were buried and picked out though the rotation of driving and driven weeding wheel for double row paddy field weeding machine. Structure model of driving weeding wheel was established, the design formulas of the structure parameters of the radius, width, speed, rake tooth and so on were developed for driving weeding wheel, and the design principles of the structural parameters for driven weeding wheel and limit deep plate were obtained through the analysis of characteristics of rice seedlings, grass root and structural requirements, which provided references for design of driven weeding wheel and limit deep plate. The mechanical models for driving weeding wheel, driven weeding wheel and the frame and limit deep plate were established, the driving moment of driving weeding wheel was deduced. According to the analysis of the structure model, mechanical model and agronomic technical parameters, the relevant parameters were determined as: the radius of driving weeding wheel was 0.15 m, the radius of driven weeding wheel was 0.1 m, the rotation speed of driving weeding wheel was 0.6 r/s, the number of rake tooth was 6, the length of rake tooth was 0.12 m, the driving moment was 27 N·m, the engine was 1.25 kW with single cylinder two stroke, the main-gear box was RV40 worm gear reducer. The field test and performance experiment were carried out for the developed double row paddy field weeding machine, the results showed that the weeding quality was good for double row paddy field weeding machine, which can meet the needs of agricultural technical indicators.
paddy field; inter-row weeding machine; weeding wheel; design; test
10.6041/j.issn.1000-1298.2017.06.009
2017-02-07
2017-04-10
國家自然科學基金項目(51205056)、國家重點研發計劃項目(2016YFD0300909-04)、東北農業大學學術骨干項目(16XG09)和東北農業大學青年才俊項目(14QC34)
王金峰(1981—),男,副教授,主要從事田間機械研究,E-mail: jinfeng_w@126.com
王金武(1968—),男,教授,博士生導師,主要從事田間機械及機械可靠性研究,E-mail: jinwuw@163.com
S224.1+5
A
1000-1298(2017)06-0071-08
猜你喜歡
科教新報(2022年22期)2022-07-02 12:34:28
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
現代農業(2015年5期)2015-02-28 18:40:49
兒童故事畫報(2013年3期)2013-06-24 05:40:30
雜草學報(2012年1期)2012-11-06 07:08:33
科技知識動漫(2011年5期)2011-05-11 08:17:22
