軟體手臂剛度特性分析
2017-06-27 08:12:06項超群郝麗娜郭少飛李存峰
農業機械學報 2017年6期
項超群 郝麗娜 張 穎 郭少飛 李存峰
(東北大學機械工程與自動化學院, 沈陽 110819)
軟體手臂剛度特性分析
項超群 郝麗娜 張 穎 郭少飛 李存峰
(東北大學機械工程與自動化學院, 沈陽 110819)
氣動肌肉驅動的軟體機器人具有質量輕、功率密度比高、人機交互安全性高等優點。提出了一種由伸長型及收縮型氣動肌肉組成的變剛度軟體機器人手臂,能夠實現位置與剛度的解耦。針對單根收縮型及伸長型氣動肌肉進行了剛度測試實驗,利用最小二乘法建立了單根氣動肌肉氣壓、位移及剛度關系模型。基于所建立的單根氣動肌肉剛度模型,針對所設計的軟體手臂,建立了手臂剛度模型。搭建了手臂剛度測試實驗平臺,通過實驗驗證可知理論模型與實驗模型的剛度變化趨勢一致,平均相對誤差為3.60%,最大相對誤差為6.17%。
軟體機器人; 伸長型氣動肌肉; 收縮型氣動肌肉; 靜剛度模型; 實驗
引言
隨著機器人技術的迅猛發展,剛性機器人技術已經相當成熟,應用范圍也很廣泛,但其質量大,成本昂貴,與非結構化環境的兼容性差等缺點是不可避免的。軟體機器人具有質量輕、結構簡單、在非結構化的環境下適應性強、可通過改變身體形狀在復雜自然環境條件下高效運動以及人機交互安全性高等優點,因此適合應用在剛性機器人難以工作的環境中。
通常軟體機器人的驅動策略采用質輕及柔順類驅動器,軟體機器人的驅動方式有柔索驅動,形狀記憶合金驅動[1]或氣動驅動等。氣動驅動的有OctArm[2],是基于靜水骨骼結構設計,如章魚觸手、大象鼻子、哺乳動物舌頭等都是典型的靜水骨骼結構,均能產生伸長、收縮、彎曲和扭轉等基本運動[3]。趙志剛等[4]研究了基于氣動人工肌肉和纜繩組合驅動的三自由度柔性氣動連續體機器人關節。2016年,中國科學技術大學課題組基于氣動網格結構[5],研制了一種氣動驅動的軟體手臂HPN(Honeycomb pneumatic networks),HPN由若干六角形的內腔組成,長度為0.63 m,最大能承受2.8 N負載,最大充氣壓力為90 kPa,質量為1.5 kg。
CHEN等[6]研制了一種單段連續機器人(Clobot),由硅橡膠材料制作而成,其內部圓周上均布有6個通道,當Clobot在0.2 MPa氣壓驅動下,可以實現120°任意方向彎曲。德國費斯托公司(Festo)的仿生助力手(BHA)[7],根據大象鼻子的特點設計出新型仿生機器,原理在于它的每一節椎骨可以通過氣囊的壓縮和充氣進行擴展和收縮。鮑官軍等[8]應用自制的氣動柔性球關節研制了氣動柔性象鼻型連續機器人。但是這些氣動驅動的軟體手臂,無法實現負載不變及位置不變情況下剛度的改變。
提高機器人的靈活性,實現其變剛度特性,減輕機器人質量等是提高人機合作安全性的有效解決方案[9]。根據VANDERBORGHT等[10]的研究結果表明降低機器人與人發生碰撞時的撞擊點的接觸剛度能有效提高機器人的安全性。因此研究氣動肌肉驅動的軟體機器人剛度特性,對于實現其剛度可變可控,提高人機協作的安全性具有重要意義。
國內外對氣動肌肉驅動結構剛度特性進行了很多研究[11-17],如建立氣動肌肉驅動的機器人的剛度模型,主要是針對拮抗、并聯和串聯等機構,結構本體主要由剛性件組成,而不是建立氣動肌肉驅動的軟體機器人的剛度模型。
本文選用氣動人工肌肉(PAM)作為機器人手臂的驅動器。初始編織角φ是氣動肌肉的一個極
其重要的參數,當φ>55°44′時PAM為伸長型氣動肌肉,當φ<55°44′時PAM為收縮型氣動肌肉[18]。當氣動肌肉充氣時,第1種氣動肌肉產生軸向伸長運動,第2種氣動肌肉產生軸向收縮運動。本文設計由伸長型及收縮型氣動肌肉組成的軟體手臂,首先對軟體手臂進行結構設計,然后建立軟體手臂的剛度模型,最后對該模型進行實驗驗證。
1 軟體手臂結構原理
1.1 結構設計
一般情況下,當氣動肌肉充入0.3 MPa壓力的氣體時,收縮型氣動肌肉的收縮率可達25%,伸長型氣動肌肉伸長率可達40%。但在相同幾何尺寸下,收縮型氣動肌肉的輸出力是伸長型氣動肌肉的3倍左右。
軟體手臂一共由4根氣動肌肉組成:圓周均布3根收縮型氣動肌肉及中間布置1根伸長型氣動肌肉。目的是通過圓周方向布置的收縮型氣動肌肉增加手臂的承載能力,通過收縮型與伸長型的工作長度差增大軟體手臂的彎曲角度。文獻[19]中的軟體手臂也將氣動肌肉安裝在中間位置,但手臂的彎曲運動依靠電動機帶動繩索驅動而不是通過氣動肌肉驅動,存在靈活性差、承載能力低、柔順性差等問題。3根收縮型氣動肌肉距離中心35 mm,圓周120°均布。為保持3根收縮型氣動肌肉與中心位置等距,通過打死結扣并通過固體膠固定的方式使收縮型與伸長型氣動肌肉相連接,結扣的材料為尼龍。結扣保持收縮型氣動肌肉與伸長型氣動肌肉連接在一起,在軸向方向上每2個結扣之間距離約為25 mm,圖1為軟體手臂結扣位置示意圖。手臂的主要結構尺寸如表1所示。

圖1 手臂結構示意圖Fig.1 Schematic of arm structure

表1 手臂尺寸及氣動肌肉參數
1.2 工作原理
機構具有結構對稱性,4個氣動肌肉中分別通入不同壓力的壓縮空氣,手臂發生伸長、彎曲、偏轉等組合變形運動,并能在運動中根據實際需求改變自身剛度。
軟體手臂的變剛度原理為:當手臂到達某一位置,同時調節伸長型及收縮型氣動肌肉內部氣壓,使伸長型氣動肌肉與收縮型氣動肌肉產生的力相互平衡,實現手臂剛度與位置的解耦。
如圖2所示,在保證手臂長度相同情況下,圖2a對中間氣動肌肉充氣,其余3根氣動肌肉不充氣,實現手臂低剛度工作狀態;圖2b增加中間氣動肌肉的壓力,同時對其余3根收縮型氣動肌肉充入一定壓力的氣體,產生一定的收縮力,保持位置不變,而實現手臂高剛度工作狀態。同樣,手臂彎曲運動時,通過調節3根收縮型氣動肌肉內部壓力及伸長型氣動肌肉內部壓力實現剛度的調節。

圖2 軟體手臂變剛度原理圖Fig.2 Schematics of variable stiffness theory for soft arm
2 軟體手臂剛度模型的建立
2.1 單根氣動肌肉的力學模型實驗辨識
由文獻[20]可知,可以將氣動肌肉視為變初始長度、變彈性系數的彈簧,則氣動肌肉的輸出力為
Fci=Kci(pci)(Li-Lci(pci)) (i=1,2,3)
(1)
Fe=Ke(pe)(Le(pe)-L)
(2)
式中pci、pe——3根收縮型及伸長型氣動肌肉內部壓力,MPa
Lci(pci)、Le(pe)——pci及pe壓力下3根收縮型及伸長型氣動肌肉無負載情況下的長度,m
Kci(pci)、Ke(pe)——3根收縮型及伸長型氣動肌肉剛度,N/m
Li、L——3根收縮型及伸長型氣動肌肉實時長度,m
2.1.1 實驗搭建
本實驗分別對收縮型及伸長型氣動肌肉進行了測試,這2種氣動肌肉的參數如表1所示。圖3為實驗測試系統簡圖,其中包括氣動肌肉、SPCU(英國Shadow Robot公司的兩位兩通電磁閥)、氣動三聯件、空氣壓縮機、拉繩傳感器、氣缸、計算機及支架等。空氣壓縮機主要為氣動肌肉及氣缸供氣,通過氣動三聯件進行調壓及穩壓。氣缸為氣動肌肉提供一定的負載,型號為SC32×75-S型,工作氣壓范圍為0~1 MPa,氣缸輸出力為
式中D——氣缸的活塞直徑d——氣缸活塞桿直徑p——氣缸內部壓力
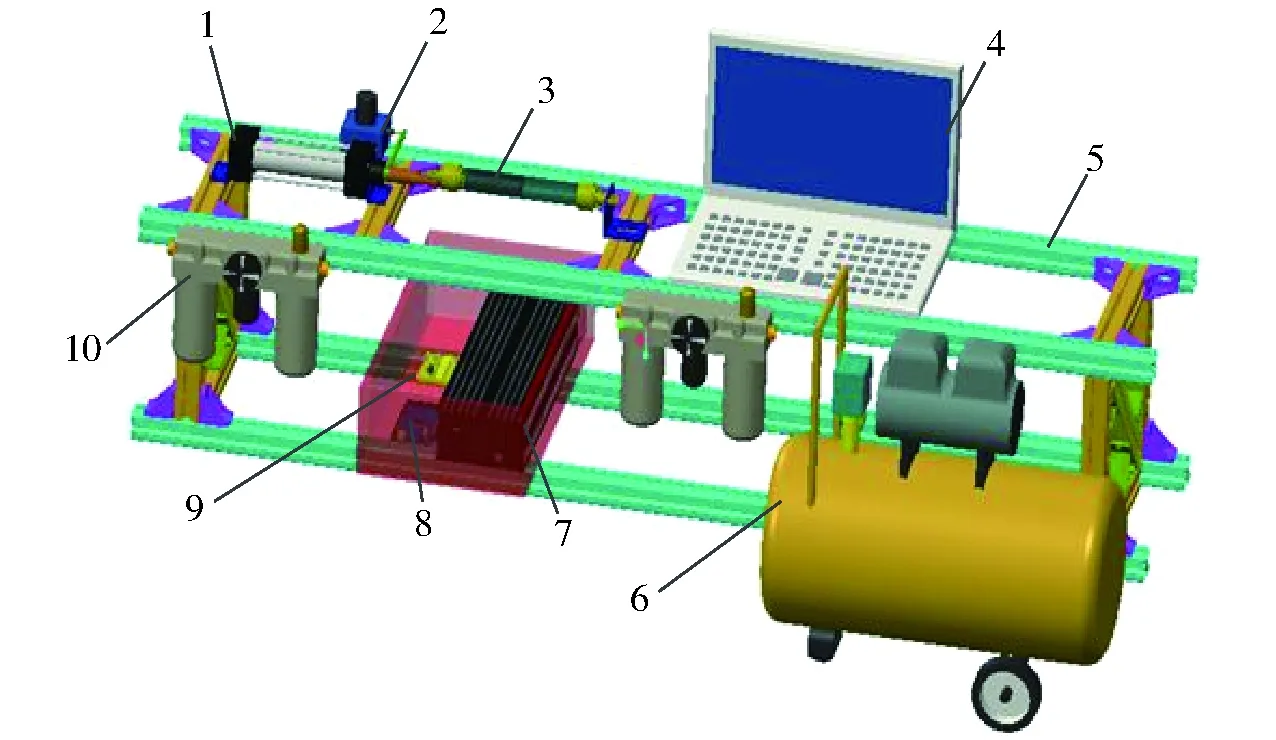
圖3 單根氣動肌肉實驗測試系統圖Fig.3 Schematic of experimental measurement system for pneumatic artificial muscle1.氣缸 2.位移傳感器 3.氣動肌肉 4.計算機 5.支架 6.氣動三聯件 7.壓力傳感器 8.Arduino 9.SPCU 10.空氣壓縮機
氣缸活塞桿前端與氣動肌肉及拉線式位移傳感器相連,用于測量氣動肌肉的輸出位移。氣動肌肉通氣端連接40PC150G2A型氣壓傳感器(美國HONEYWELL公司),用來實時檢查其內部壓力。實驗中,通過開源電子原型平臺Arduino采集氣壓傳感器及位移傳感器數據,實時記錄氣動肌肉的壓力及氣動肌肉的時刻長度,并向SPCU發送PWM(脈沖寬度調制)信號來調節氣缸及氣動肌肉內部壓力。
2.1.2 模型辨識
根據上述內容,氣動肌肉可視為變初始長度及變彈性系數的彈簧。首先利用圖3所示實驗測試系統測試2種氣動肌肉無負載時在不同壓力下的長度,將氣缸的內部壓力設置為零,通過SPCU緩慢調節氣動肌肉內部氣壓從零變化到0.3 MPa,每次增加0.02 MPa。實驗過程中氣動肌肉內部氣壓緩慢變化,整個測量呈現準靜態過程。通過實驗得出2種氣動肌肉在不同壓力下的長度,利用Matlab曲線擬合工具箱(cftool)對這2種氣動肌肉的長度進行擬合。其擬合方程為
(0 MPa (3) (0 MPa (4) 其中a1=0.021 2,a2=-0.070 4,a3=-0.006 89,a4=0.628 44;b1=-0.038 93,b2=0.242 1,b3=-0.527,b4=0.47,b5=0.625。然后,利用圖3所示實驗測試系統測試2種氣動肌肉不同壓力下的剛度。通過氣動三聯件依次調節氣動肌肉的內部壓力從零變化到0.3 MPa,每次增加0.02 MPa,整個測量呈現準靜態過程。通過實驗得出2種氣動肌肉在不同壓力、不同負載下的長度變化,再次利用Matlab曲線擬合工具箱(cftool)分析,擬合的2種氣動肌肉剛度方程為 (5) (6) 2.2 軟體手臂剛度模型 根據氣動肌肉的結構布局,假定軟體氣動手臂的彎曲運動能完全描述成一變曲率的均勻圓弧[21]。手臂的簡化模型如圖4所示,位置可由3個變量表示:曲率半徑λ、偏轉角θ和彎曲角度φ,則中間伸長型氣動肌肉的長度為L=λ。上下2個圓盤分別為頂端圓盤和底部圓盤,O1為底部運動端圓盤圓心,O2為頂部固定端圓盤圓心,Oc為手臂彎曲的圓弧圓心,3根收縮型氣動肌肉與頂端圓盤的交點分別為A1、A2、A3,與底端圓盤的交點為B1、B2、B3。在頂端圓盤中心處建立整體坐標系,坐標原點位于O2處,A1點位于x軸的正方向,z軸和頂端圓盤垂直。4根氣動肌肉均未充氣時的長度相等,為L0=625 mm。軟體氣動手臂主要靠氣壓進行工作,通過調節通入手臂的氣壓,實現其在空間各個方位的運動。根據手臂的對稱性可知中間氣動肌肉長度L為 (7) 圖4為手臂空間位置及受力示意圖,在任何位置,氣動肌肉末端始終垂直于底端圓盤。圖4b為取手臂底端圓盤為受力對象,分別對x1軸及y1軸取矩并根據受力的平衡關系得 (8) 圖4 軟體手臂幾何位置及受力示意圖Fig.4 Schematics of geometric position and force analysis 將式(1)、(7)分別代入式(8)并化簡整理,得 (9) (10) (11) 將式(9)、(11)代入式(7)并整理,得 (12) 其中 A=Kc1Kc2Kc3 B=Kc1Kc2+Kc1Kc3+Kc3Kc2 在充氣壓力不變的情況下,軟體手臂的剛度可表示為 (13) 由式(12)、(13)可得軟體手臂的靜態剛度表達式 (14) 3.1 實驗裝置 為驗證所建立的軟體手臂剛度與壓強關系的模型,搭建了如圖5所示實驗裝置,實驗裝置主要包括:軟體手臂、Arduino Mega2560、氣泵、氣動三聯件、1 kg砝碼、電位計、滑輪、細繩、復位彈簧。實驗中,通過氣泵為4根氣動肌肉提供氣源,并通過氣動三聯件調節氣動肌肉內部壓力。細繩一端與復位彈簧相連,另一端通過打結的方式固定在軟體手臂中間氣動肌肉上,當軟體手臂發生形變時,中間氣動肌肉長度的變化通過細繩帶動滑輪旋轉改變電位計的阻值,利用Arduino采集手臂實時長度并將數據傳遞給上位機,利用砝碼為手臂提供一定負載。 圖5 實驗裝置圖Fig.5 Test rig1.氣缸 2.氣動三聯件 3.Arduino Mega2560 4.變剛度軟體手臂 5.砝碼 6.電位計 7.滑輪 8.細繩 9.復位彈簧 3.2 實驗驗證 在實驗中,加砝碼前,維持手臂長度為610 mm。先將伸長型氣動肌肉充入一定氣體,手臂會產生軸向伸長。然后對3根縮短型氣動肌肉充入氣體,以確保手臂長度保持610 mm。中間氣動肌肉分別充入0、0.05、0.10、0.15、0.20、0.25 MPa氣體。其所對應的3根收縮型氣動肌肉充入的氣體壓力為0.080、0.090、0.100、0.120、0.140、0.145 MPa。保持手臂長度不變,然后在底端懸掛質量1 kg砝碼,并通過Arduino讀取手臂的長度變化量。本實驗重復進行3次,通過胡克定律算出每次手臂的剛度,并取其平均值。圖6為手臂剛度實驗值與理論值對比。 圖6 實驗值與理論值對比Fig.6 Comparison of experiment and theoretical values 從圖6可看出,理論值與實驗值的整體變化趨勢一致,其平均相對誤差為3.60%,最大相對誤差為6.17%。分析該模型產生誤差的原因是模型沒有將氣動肌肉之間結扣的影響考慮進去,且其忽略了伸長型及收縮型氣動肌肉中間的摩擦等因素。 (1)設計了一種軟體手臂,該手臂由收縮型氣動肌肉及伸長型氣動肌肉組成。其具有較高的柔順性,并且運動靈活,能夠根據不同的使用需求實現剛度調節,該手臂具有良好的柔順性和安全性。 (2)基于伸長型及收縮型氣動肌肉的靜剛度模型,建立了軟體手臂的剛度模型,通過實驗對比可知理論模型與實驗模型的整體剛度變化趨勢一致,其平均相對誤差為3.60%,最大相對誤差為6.17%。 1 LASCHI C, MATTEO C, BARBARA M, et al. Soft robot arm inspired by the octopus[J]. Advanced Robotics, 2012, 26(7): 709-727. 2 MCMAHAN W, CHITRAKARAN V, CSENCSITS M,et al. Field trials and testing of the OctArm continuum manipulator[C]∥Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006: 2336-2341. 3 KIER W M, SMITH K K. Tongues, tentacles and trunks: the biomechanics of movement in muscular-hydrostats[J]. Zoological Journal of the Linnean Society, 1985, 83(4): 307-324. 4 趙志剛, 陳志剛. 柔性氣動連續體機器人關節結構設計與運動學分析[J]. 機械科學與技術, 2015, 34(2): 184-187. ZHAO Zhigang, CHEN Zhigang. Mechanism design and kinematics analysis of pneumatic soft continuum robot joint[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(2): 184-187.(in Chinese) 5 JIANG H, LIU X, CHEN X, et al. Design and simulation analysis of a soft manipulator based on honeycomb pneumatic networks[C]∥2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2016: 350-356. 6 CHEN G, PHAM M T, REDARCE T. Sensor-based guidance control of a continuum robot for a semi-autonomous colonoscopy[J]. Robotics and Autonomous Systems, 2009, 57(6):712-722. 7 FESTO. Bionic handling assistant[J]. Information Brochure. Festo, 2010. 8 鮑官軍, 邵鐵鋒, 李尚會,等. 氣動柔性擺動關節靜態模型[J]. 農業機械學報, 2011, 42(6):198-202. BAO Guanjun, SHAO Tiefeng, LI Shanghui, et al. Static model of flexible pneumatic swaying joint[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6):198-202.(in Chinese) 11 CHOI T Y, LEE J Y, LEE J J. Control of artificial pneumatic muscle for robot application[C]∥IEEE 2006 International Conference on Intelligent Robots and Systems, 2006:4896-4901. 12 IWAKI M, HASEGAWA Y, SANKAI Y. Study on wearable system for daily life support using McKibben pneumatic artificial muscle[C]∥ IEEE/RSJ International Conference on Intelligent Robots & Systems, 2010:3670-3675. 13 UGURLU B, FORNI P, DOPPMANN C, et al. Torque and variable stiffness control for antagonistically driven pneumatic muscle actuators via a stable force feedback controller[C]∥IEEE 2015 International Conference on Intelligent Robots and Systems, 2015:1633-1639. 14 隋立明, 王祖溫, 包鋼. 氣動肌肉的剛度特性分析[J]. 中國機械工程, 2004, 15(3):242-244. SUI Liming, WANG Zuwen, BAO Gang. Analysis of stiffness characteristics of the pneumatic muscle actuator[J]. China Mechanical Engineering, 2004, 15(3):242-244.(in Chinese) 15 傅曉云, 方敏, 李寶仁. 氣動人工肌肉剛度特性的分析[J]. 機床與液壓, 2007, 35(2):109-111. FU Xiaoyun, FANG Min, LI Baoren. Theoretic analysis of stiffness characteristics of the pneumatic muscle actuator[J]. Machine Tool & Hydraulics, 2007, 35(2):109-111.(in Chinese) 16 劉延斌, 李志松, 底復龑. 基于氣動人工肌肉變剛度并聯減振系統模型及特性研究[J]. 液壓與氣動, 2013(11):52-56. LIU Yanbin, LI Zhisong, DI Fuyan. The model and characteristics research of variable stiffness parallel vibration system based on pneumatic artificial muscle[J]. Chinese Hydraulics & Pneumatics, 2013(11):52-56.(in Chinese) 17 朱笑叢. 氣動肌肉并聯關節高精度位姿控制研究[D]. 杭州:浙江大學, 2007. ZHU Xiaocong. Research on the high precision posture control of parallel manipulator driven by pneumatic muscles[D]. Hangzhou: Zhejiang University, 2007.(in Chinese) 18 CHOU C P, HANNAFORD B. Static and dynamic characteristics of McKibben pneumatic artificial muscles[C]∥Proceedings of IEEE International Conference on Robotics and Automation, 1994,1:281-286. 19 NEPPALLI S, JONES B A. Design, construction, and analysis of a continuum robot[C]∥2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007: 1503-1507. 20 TSAGARAKIS N, CALDWELL D G, MEDRANO-CERDA G A. A 7-DOF pneumatic muscle actuator (PMA) powered exoskeleton[C]∥Proceedings of IEEE International Workshop on Robot and Human Interaction, 1999:327-333. 21 DEYLE T. Amoeba-like whole-skin locomotion robots ooze right on by[EB/OL] (2010-02-10)[2016-09-01].http:∥www.hizook.com/blog/2010/01/31/amoeba-whole-skinlocomotion-robots-ooze-right. Analysis of Stiffness Characteristics of Soft Arm XIANG Chaoqun HAO Li’na ZHANG Ying GUO Shaofei LI Cunfeng (SchoolofMechanicalEngineeringandAutomation,NortheasternUniversity,Shenyang110819,China) Soft robot arm driven by pneumatic artificial muscles can possess the ability of high ratio of power to weight, important for performance and light weight, and a vital component of the inherent safety approach to physical human-robot interaction. One of the main drawbacks of pneumatically actuated soft arm is that their stiffness cannot be varied independently from their position in space. Based on these reasons, a novel variable stiffness soft robotic arm composed of both three contractile and one extensor pneumatic artificial muscles was presented. This arm combined the light weight, high ratio of power to weight and robustness of pneumatic actuation with the adaptability and versatility, and stiffness can be adjusted independently of its length. Experiment platform of single contractile and extensor pneumatic artificial muscles was setup, and the static characteristic was identified for contractile and extensor pneumatic artificial muscles through quasi-static experiments. By using the least square method, the relational model of pressure, distance and stiffness for single contractile and extensor pneumatic artificial muscles was established. In order to analyze the stiffness characteristic of this arm, stiffness model of the designed soft arm was established. Stiffness experiment platform of this soft arm was setup. Experiment data was compared with theoretical model, and they possessed the same trend, the mean relative error was 3.60%, and the maximum relative error was 6.17%. soft robot; expansive PAM; contractile PAM; static stiffness model; experiment 10.6041/j.issn.1000-1298.2017.06.054 2016-09-21 2016-10-10 國家自然科學基金面上項目(61573093)、國家高技術研究發展計劃(863計劃)項目(2015AA042302)和中央高校基本科研業務費專項資金項目(N150308001) 項超群(1986—),男,博士生,主要從事軟體機器人研究,E-mail: 23476614@qq.com 郝麗娜(1968—),女,教授,博士生導師,主要從事機器人建模與智能控制研究,E-mail: haolina@me.neu.edu.cn TP242.3 A 1000-1298(2017)06-0407-06

3 實驗驗證


4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42中學生數理化·中考版(2022年11期)2022-02-16 07:01:20中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50光學精密工程(2016年6期)2016-11-07 09:07:19發明與創新(2016年38期)2016-08-22 03:02:52太空探索(2016年5期)2016-07-12 15:17:55核科學與工程(2015年4期)2015-09-26 11:59:03
