電軌智能小車設計
2017-06-21 11:10:25德州學院機電工程學院王浩然崔慶福呂波漾陳潔
河北農機 2017年6期
德州學院機電工程學院 王浩然 崔慶福 呂波漾 陳潔
電軌智能小車設計
德州學院機電工程學院 王浩然 崔慶福 呂波漾 陳潔
該小車采用通電導線讓金屬在交變磁場中感應渦流對車進行引導,讓車沿一定軌跡行走,通過對線圈得到的信號進行調節放大,控制小車舵機運行的電路,并根據方案實際制作了小車,優點主要體現在交變磁場中感應渦流良好的環境適應性。
電軌智能車;金屬;線圈;交變磁場;感應渦流
1 引言
本設計以第十一屆全國大學生“恩智浦”杯智能汽車競賽為背景,提出了一種利用金屬在交變磁場感應渦流的特性引導小車循跡行駛的方案。本文介紹了這一方案的基本思想、所依據的物理原理,設計了對線圈得到的信號進行調節放大、控制小車舵機運行的電路,并根據方案實際制作了小車。實踐證明,該方案是可行的。以往的智能車競賽分為光電組、攝像頭組和電磁組,其中光電組主要是使用光電傳感器如紅外傳感器采集路徑信息;攝像頭組主要通過采集圖像信息識別路徑;電磁組主要是電通電導線產生的電磁場探測路徑,而電軌不受光線、溫度、濕度、磁場等環境因素的影響。
2 設計原理
由于鋁膜膠帶的顏色是銀色的,與賽道表面的顏色相近,所以使用普通的攝像頭檢測鋁膜膠帶的位置比較困難。可以利用鋁膜的金屬特性,即利用金屬在交變磁場產生感應渦流的特性來檢測鋁膜的位置,進而引導小車的行駛。這種檢測方式應用比較廣泛,從安檢過程中使用的手持金屬探測儀到工業生產中渦流距離傳感器,都是運用類似的原理。
當通有交變電流(頻率小于一定數值)的線圈靠近金屬物體的時候,線圈周圍的交變磁場會在金屬物體中感應出渦流。渦流所產生的二次磁場疊加在原來的磁場中則會改變原有線圈中的感應電動勢,進而可以等效改變原線圈的電抗(圖1)。
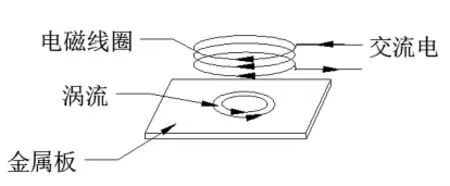
圖1 扁平線圈在導電板中感應渦流示意圖
線圈電抗改變的大小與線圈的形狀、振蕩頻率、線圈與金屬相對位置以及金屬的電導率、磁導率有關系。如果在線圈形狀、振蕩頻率以及金屬種類都確定的情況下,線圈電抗的變化則能夠反映線圈與金屬之間的相對位置。

圖2 矩形線圈與金屬平板之間測相對位置
檢測線圈與金屬之間的相對位置參數主要包括距離和重合面積,圖2顯示的是一個矩形線圈與金屬平板之間的相對位置,如果距離不變,則相對位置主要由線圈與金屬平板之間的重合距離決定。本文所給出的參考方案就是利用這個特點來測量線圈與金屬之間的相對重合距離,進而反映了車模與賽道的偏移量。
3 設計方案
3.1 總體方案設計
賽車的位置信號由車體前方的電軌傳感器采集,經內部脈沖計數和DMA采集后,輸入到控制核心,用于賽車的運動控制決策。通過編碼器測速模塊來檢測車速,并采用K60的輸入捕捉功能進行脈沖計數,計算速度和路程。電機轉速控制采用PID控制,通過PWM控制驅動電路調整電機的轉速,完成智能車速度的閉環控制,此外鍵盤作為輸入輸出設備,用于智能車的速度控制,液晶屏時刻顯示車的狀態以實現車模穩定高速地運行。
3.2 機械結構設計
智能車系統的控制是在一定機械結構的基礎上實現的,軟件控制硬件,而硬件卻依賴于機械結構,合理優良的機械結構能讓智能車在直道和彎道上高速穩定地通過,而且轉彎靈巧、快速,可見機械結構的設計質量直接影響系統的整體性能。
賽車機械結構只使用競賽提供車模的底盤部分及轉向和驅動部分,控制采用前輪轉向,后輪驅動的方案。小車在轉向時,彎道內側的前輪會比外側的前輪位置低,會造成內側底盤更高,這樣使得彎道內側前輪壓力更大,利于轉向,但會造成四個輪子高度不一,使得底盤平衡改變,造成高速轉彎時不穩定。最終采用了反應較為敏捷的硬連接結構。
傳感器的采集寬度對車模行駛有較大影響,寬度越寬檢測的賽道信息越寬,在彎道不容易發生偏離太多而沖出賽道的情況,一般傳感器越長,車模前瞻越好,在彎道更容易及時判斷入彎,但是傳感器過長會使車模轉動慣量變大,車模重心靠前,使車模轉向困難。在多急彎、有坡道的環境中,為了順利通過急彎賽道,綜合車模的前瞻與轉動慣量及重心的影響,經過多次嘗試,采用了雙桿支架和三線圈結構,保證傳感器在運動中的采集穩定性。為了能順利通過坡道,在前瞻支架最遠端兩側和中部線圈兩側安放輔助導輪且不在車模上固定傳感器,以保證順利過坡。傳感器的安裝結構如圖3所示。
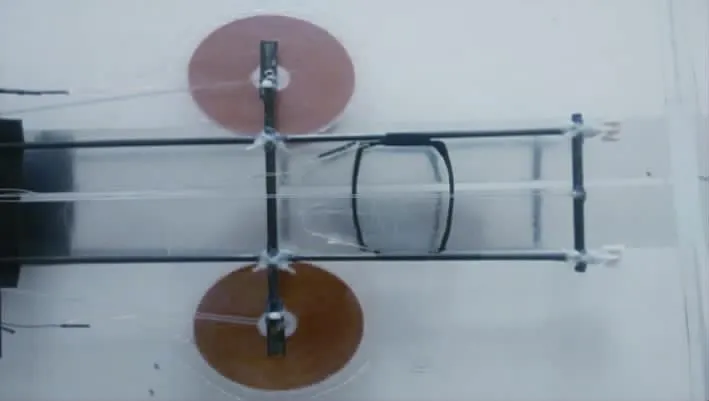
圖3 傳感器線圈安裝方式示意圖
3.3 系統電路設計
系統電路的設計目標是可靠、高效、簡潔,在整個系統設計過程中嚴格按照規范進行。可靠性是系統設計的第一要求,本團隊對電路的所有環節都進行了電磁兼容性設計,做好各部分的接地、屏蔽、濾波等工作,將高速數字電路與模擬電路分開,使本系統工作的可靠性達到了設計要求。高效是指本系統的性能要足夠強勁,在此前提下還要優化電路結構,盡量做到簡潔。系統主控電路如圖4所示。
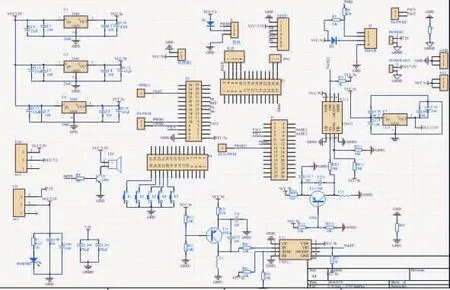
圖4 主控電路圖
3.4 控制算法分析
首先是位置判斷,通過計算定方向差值即左邊線圈減右邊線圈所獲值,線圈所獲的值均為定值脈寬采集到的脈沖數。最初我們采用的是直接通過差值來確定車的偏移量,經過一段時間的測試,發現采集范圍有限,車速慢,提速極易沖出賽道。于是開始嘗試尋找突破,最終通過運用DMA增加一路傳感器采集,使其成為三線圈結構。但是如果繼續提高速度,賽車還是會丟線沖出賽道,因此開始嘗試運用三線圈寫出丟線。所謂三線圈丟線,就是當三線圈獲得的值都小于它們都檢測不到金屬鋁膜所得的值時,此時判定丟線,賽車取上一次狀態。
4 總結
在充分查閱資料、進行理論分析的基礎上,對電軌智能汽車的機械結構、硬件電路和控制軟件分別進行了設計。在機械結構方面,綜合考慮到系統的穩定性與簡便性,并通過反復實踐確定了傳感器的數量和位置,采用雙桿支架和三線圈結構,保證傳感器在運動中的采集穩定性,為了能順利通過坡道,在前瞻支架最遠端兩側和中部線圈兩側安放輔助導輪且不在車模上固定傳感器,以保證順利過坡。在控制軟件方面,利用組委會推薦的開發工具編寫調試程序,經過團隊成員不斷討論、改進,終于設計出一套通用、穩定的程序,實現根據路況調整車速與轉向,并在最短時間內跑完全程。經過反復測試、校賽與省賽的檢驗,證明了該設計方案的可靠、穩定與高效。
[1]卓晴,黃開勝,邵貝貝.學做智能車[M].北京:北京航空航天大學出版社,2007.
[2]邵貝貝.單片機嵌入式應用的在線開發方法[M].北京:清華大學出版社,2004年10月第1版.
[3]競賽組秘書處.路徑檢測設計參考方案[M].2015.12.
[4]童詩白,華成英.模擬電子技術基礎[M].北京.高等教育出版社,2000.
[5]余志生.汽車理論[M].北京:機械工業出版社,2006.05.
[6]胡壽松.自動控制原理[M].北京:科學出版社,2001年2月第4版.
[7]http://www.freescale.com.cn/.
王浩然,男,1995年出生,山東省聊城市人,本科在讀,研究方向:機械設計制造及其自動化。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
