基于一種新混合群算法(MOHO—SA)的結構主動控制多目標優(yōu)化研究
2017-06-19 19:22:53潘兆東譚平周福霖
湖南大學學報·自然科學版 2017年5期
潘兆東+譚平+周福霖

摘 要:基于粒子群(PSO)算法和差分進化(DE)算法提出了一種新的多目標混合群優(yōu)化算法,對結構主動控制系統(tǒng)的作動器位置、數量與控制器參數進行同步優(yōu)化.首先,分別采用PSO算法與DE算法進行對應種群的進化,使用莊家法則構造非支配解集,并引入邊界點幾何中心leader選擇機制,同時利用模擬退火算法完成個體進化的二級局部搜索;以隨機地震激勵下反映結構振動控制效果和控制策略優(yōu)劣的雙指標作為優(yōu)化目標函數.最后,針對ASCE 9層benchmark模型,采用本文提出的具有二級搜索功能的多目標混合群算法(MOHO-SA)對其主動控制系統(tǒng)進行優(yōu)化設計,并分別與多目標差分進化算法(MODE)、多目標粒子群算法(MOPSO)、普通多目標混合群算法(MOHA)的優(yōu)化結果進行對比分析,表明其Pareto解集具有更優(yōu)的收斂曲線及分布性.
關鍵詞:主動控制;混合群算法;二級搜索;多目標優(yōu)化;莊家法則;幾何中心leader
中圖分類號:TU375.3 文獻標志碼:A
文章編號:1674-2974(2017)05-0020-07
Abstract:This paper proposes a new multi-objective hybrid swarm optimization method for active control system based on particle swarm algorithm and differential evolution algorithm, in which the parameters of controller, and the number of and allocation of actuator are synchronously optimized. The basic idea is as follows: The different algorithms are used to complete the evolution of corresponding population, the non-dominated solution set is achieved based on the dealer principle, and the leader selection based on boundary point geometry center is adopted. Meanwhile, the simulated annealing algorithm is used for the secondary local search, the two indexes reflecting the structural vibration control effect and performance of control strategy are used as the optimization objective function. Finally, a ASCE 9-story benchmark model is used as a numerical example to validate the effectiveness of the proposed method. Compared with the conventional MODE, MOPSO, and MOHA algorithm, the MOHO-SA algorithm has better convergence curve and distribution of the pareto solution sets.
Key words: active control;hybrid swarm algorithm; two level search; multi-objective optimization; dealer principle; geometric center leader selection
在土木工程結構主動控制研究領域中,作動器數量、位置及控制器參數的優(yōu)化一直是研究熱點之一.面對規(guī)模宏大、結構復雜、功能多樣的超限工程結構,振動控制系統(tǒng)若采用傳統(tǒng)的優(yōu)化方法進行設計必然很難得到最優(yōu)解.隨機類搜索方法如模擬退火法(SA)、遺傳算法(GA)及群算法為全局優(yōu)化算法且可用于離散優(yōu)化問題,因而被廣泛地用于控制裝置的位置優(yōu)化研究[1-10].但以往的研究多是基于特定的外界激勵、優(yōu)化準則及單一優(yōu)化目標進行優(yōu)化設計,優(yōu)化方法不具備普遍適用性,優(yōu)化結果也往往只是次優(yōu)解.文獻[11]在限定作動器數量的前提下,利用多目標遺傳算法對一6層平面框架進行了作動器位置與控制器的一體化設計,同時得到多組相對較優(yōu)解.但文獻[12]指出NSGA-II算法會存在收斂慢和局部搜索能力不足的問題,還有待結合具體問題的特點加以改進.
本文提出一種新的多目標混合群優(yōu)化算法,同時采用粒子群(PSO)算法[13]與差分進化(DE)算法[14]進行對應種群的進化,使用莊家法則構造[15]非支配解集,并利用模擬退火算法[16]完成個體進化的二級局部搜索;文中結合土木工程結構控制特點(有較好的控制效果)及實現性(較低的控制能量),建立邊界點幾何中心leader選擇機制,在滿足種群進化多樣性要求的同時保證了收斂速度;在平穩(wěn)隨機地震激勵下,以反映結構振動控制效果和控制策略優(yōu)劣的雙指標作為優(yōu)化目標函數對控制系統(tǒng)的作動器位置、數量與控制器參數進行同步優(yōu)化.最后,以ASCE 9層benchmark模型為例進行優(yōu)化設計,結果表明,所提出的新混合群算法能有效地解決主動控制系統(tǒng)優(yōu)化問題.
3.1 基于莊家法則構造Pareto最優(yōu)解
研究如何構造一個多目標優(yōu)化問題的Pareto最優(yōu)解集,實際上就是研究如何構造進化群體的非支配集,因而構造非支配集的效率將直接影響算法的運行效率.莊家法則是構造非支配集的常用方法之一,該方法具有速度快、效率高的特點,其本質上是一種非回溯的方法.使用這種方法,在每次構造新的非支配個體時不需要與已有的非支配個體進行比較,每一輪比較在構造集中選出一個個體出任莊家(一般為當前構造集的第一個個體),由莊家依次與構造集中的其它個體進行比較,并將莊家所支配的個體淘汰出局;一輪比較后,若莊家個體不被任何其它個體所支配,則莊家個體即為非支配個體,否則莊家個體在該輪比較結束時也被淘汰出局.按照這種方法進行下一輪比較,直至構造集為空.
3.2 最優(yōu)解邊界點幾何中心leader選擇策略
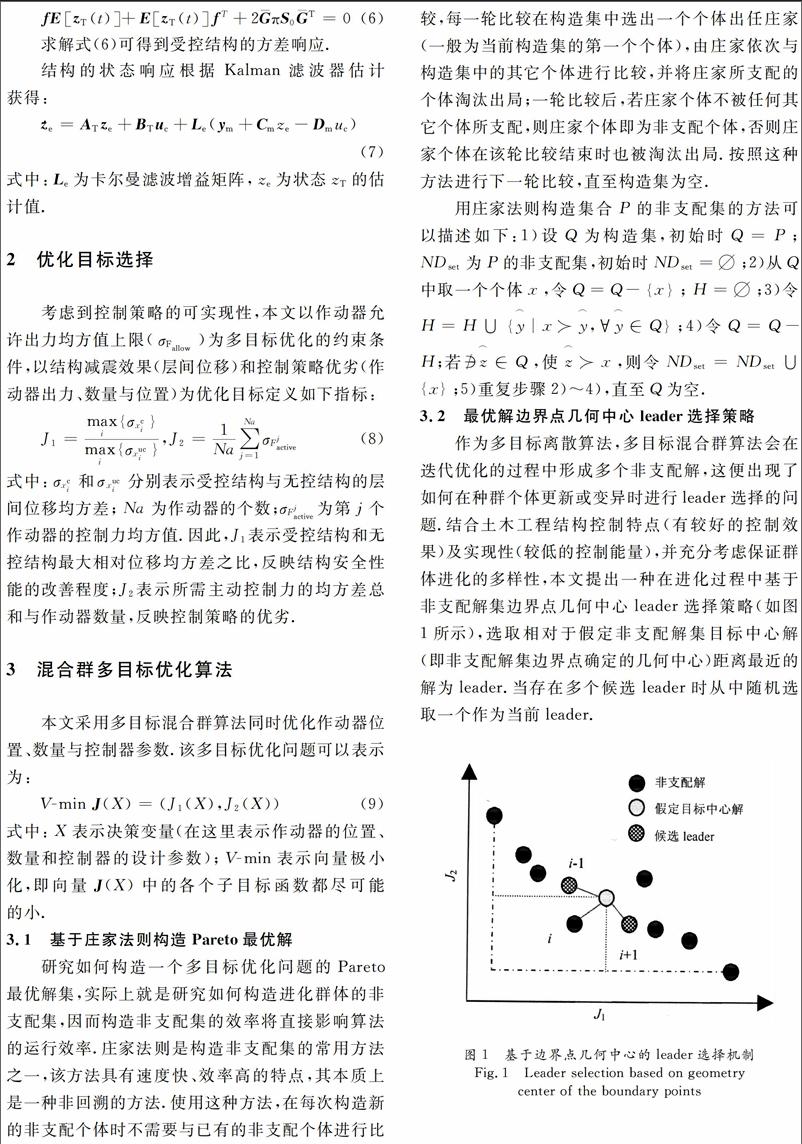
作為多目標離散算法,多目標混合群算法會在迭代優(yōu)化的過程中形成多個非支配解,這便出現了如何在種群個體更新或變異時進行l(wèi)eader選擇的問題.結合土木工程結構控制特點(有較好的控制效果)及實現性(較低的控制能量),并充分考慮保證群體進化的多樣性,本文提出一種在進化過程中基于非支配解集邊界點幾何中心leader選擇策略(如圖1所示),選取相對于假定非支配解集目標中心解(即非支配解集邊界點確定的幾何中心)距離最近的解為leader.當存在多個候選leader時從中隨機選取一個作為當前l(fā)eader.
3.3 混合群算法進化策略
進化策略是任何基于種群算法的關鍵環(huán)節(jié),在進化過程中,種群中的個體通過不斷的更新和選擇,直到達到終止準則,本文采用兩種進化策略:差分進化算法和粒子群算法.其中,關于作動器位置和數量的種群個體更新采用粒子群算法,而控制器參數的種群個體位置進化則采取差分進化算法.
3.4 模擬退火二級局部搜索
文獻[11]研究表明,當控制效果降低到某一范圍之內時,作動器的最優(yōu)位置基本不變,此時,主動控制效果僅與控制增益有關.因此本文在優(yōu)化過程中針對每一次個體變異、交叉后的位置(即控制器參數)進行一次局部隨機搜索,通過全局和局部相結合的二級搜索,可以避免由于種群個體敏感度不同而引起的搜索振蕩,從而優(yōu)化Pareto解集的搜索.這里采用基于固體退火原理和概率理論的模擬退火算法[16],其將優(yōu)化問題類比為退火過程中能量的最低狀態(tài),也就是溫度達到最低點時,概率分布中具有最大概率(概率1)的狀態(tài).
圖2即為引入局部模擬退火搜索算法后的多目標混合群優(yōu)化算法流程圖.
4 混合群多目標優(yōu)化算法
選取ASCE設計的9層鋼結構Benchmark模型[18](圖3)作為仿真算例.采用靜力凝聚法對原有限元模型進行降階后僅保留9個平動自由度.每一層作動器數量少于結構跨數的2/3,單個作動器最大允許控制力均方值為1 000 kN,控制器權矩陣Q=10αI18×18,R=INa×Na.地震激勵參數[19]:S0=3.23 cm2/s3,wg=17.95 rad/s,ξg=0.64.多目標混合群優(yōu)化算法參數見表1.
圖4為利用MODE方法進行優(yōu)化時獲得的初始種群解、最終非劣解以及整個優(yōu)化過程中選擇的所有l(wèi)eader.可以看出,依據本文提出的邊界點幾何中心leader選擇機制所確定的leader能很好地覆蓋結構振動控制策略感興趣的范圍,不會產生過多的不可實現解(J1無限趨于小值)和無意義解(J1無限趨于1),其在滿足了種群進化多樣性要求的同時也加快了收斂速度.圖5給出了采用不同優(yōu)化算法時的收斂曲線對比(為了便于比較,僅繪出保證曲線趨向的部分點),圖中橫坐標為進化代數,縱坐標為代表收斂性的控制力方差值.可以看出,具有二級搜索功能的新混合群算法較早地進行了局部搜索,相較其他3種算法,具有更好的穩(wěn)定性和收斂性.
為了說明混合群算法的優(yōu)越性,在同一初始種群下,本文同時將一般多目標混合群算法(MOHO)、多目標粒子群算法(MOPSO)及多目標差分進化算法(MODE)應用于該模型控制系統(tǒng)的優(yōu)化設計中,圖6為以上3種多目標算法的最終非劣解集.由結果可知:MODE算法與MOPSO算法均會不同程度地遺失最優(yōu)解,而基于雙進化策略的MOHO算法最優(yōu)解集則表現出很好的連續(xù)性和分布性;注意到,雖然MODE算法解集分布過于分散,但在等幅最大控制力均方差總和下(J2),其部分解對應的(J1)較MOHO算法更小,這說明MOHO算法局部搜索能力仍然不夠,因此,有必要引入二級搜索功能以加強其搜索能力.
圖7為引入局部模擬退火搜索算法后多目標混合群優(yōu)化算法(MOHO-SA)獲得的控制系統(tǒng)最終非劣解集曲線,為了便于比較,這里僅繪出最終最優(yōu)解集維數的一半.將其與MOHO最終非劣解集曲線對比,不難發(fā)現,在相同優(yōu)化目標J2下,MOHO-SA算法可以獲得更好的控制效果(J1較小),使控制策略進一步趨于優(yōu)化.表2列出了從Pareto最優(yōu)前沿曲線中選擇的一些最優(yōu)個體所對應的控制裝置數量、位置和相應的控制器參數.可以發(fā)現,四組優(yōu)化結果的作動器總數大致相同,作動器的位置也主要集中在結構中下層;其中,控制策略1可以更高效地發(fā)揮所有作動器的作用.
仿真分析結果充分驗證了本文所提出的具有二級搜索功能的新混合群算法的正確性與優(yōu)越性.究其原因,首先MOHO-SA算法在迭代過程中引入了邊界點幾何中心leader機制改善解集的分布性;其次進化過程中采用兩種不同進化策略,并在MOHO算法基礎上利用模擬退火算法加入局部二級搜索功能,從而改善了非劣解集最優(yōu)前沿曲線的分布.
5 結 論
1)本文基于粒子群(PSO)算法和差分進化(DE)算法提出的多目標混合群算法能有效地解決主動控制系統(tǒng)作動器數量、位置及控制器參數的同步優(yōu)化問題,驗證了本文所提出邊界點幾何中心leader選擇機制的實用性.
2)對于主動控制系統(tǒng),一般混合群算法較單一進化策略的多目標優(yōu)化算法而言,其最優(yōu)解前沿線具有更好的連續(xù)性和分布性,保證了針對每一設計性能要求都有對應解,便于設計者選擇.
3)具有二級搜索功能的新多目標混合群算法有效地改善了傳統(tǒng)多目標優(yōu)化算法局部搜索能力不強的缺陷,可以獲得更加合理的控制策略.
參考文獻
[1] 劉福強,張令彌.作動器/傳感器優(yōu)化配置的研究進展[J].力學進展,2000,30(4):506-516.
LIU Fuqiang, ZHANG Lingmi. Advances in optimal placement of actuators and sensors[J]. Advances in Mechanics, 2000,30(4):506-516.(In Chinese)
[2] CHEN G S, BRUNO R J, SALAMA M. Optimal placement of active/passive members in truss structures using simulated annealing[J]. AIAA Journal, 1991,29(8):1327-1334.
[3] LIU X, BEGG D W, MATRAVERS D R. Optimal topology∕actuator placement design of structures using SA[J]. Journal of Aerospace Engineering, 1997,10(3):119-125.
[4] ABDULLAH M M, RICHARDSON A, HANIF J. Placement of sensors/actuators on civil structures using genetic algorithms[J]. Earthquake Engineering & Structural Dynamics, 2001, 30(8):1167-1184.
[5] LIU D K, YANG Y L, LI Q S. Optimum positioning of actuators in tall buildings using genetic algorithm[J]. Computers & Structures, 2003, 81(32):2823-2827.
[6] 郭惠勇, 蔣健, 張陵. 改進遺傳算法在MRFD半主動控制系統(tǒng)優(yōu)化配置中的應用[J]. 工程力學, 2004, 21(2):145-151.
GUO Huiyong, JIANG Jian, ZHANG Ling. Optimal placement of MRFD using improved genetic algorithms[J]. Engineering Mechanics, 2004, 21(2):145-151.(In Chinese)
[7] LI Q S, LIU D K, TANG J, et al. Combinatorial optimal design of number and positions of actuators in actively controlled structures using genetic algorithm[J]. Journal of Sound & Vibration, 2004, 270(4/5):611-624.
[8] TAN P, DYKE S J, RICHARDSON A, et al. Integrated device placement and control design in civil structures using genetic algorithms[J]. Journal of Structural Engineering, 2005, 131(10):1489-1496.
[9] 吳亮紅,王耀南,袁小芳,等.多目標優(yōu)化問題的差分進化算法研究[J].湖南大學學報:自然科學版,2009,36(2):53-57.
WU Lianghong, WANG Yaonan, YUAN Xiaofang, et al. Research on differential evolution algorithm for mops[J]. Journal of Hunan University: Natural Sciences, 2009,36(2):53-57.(In Chinese)
[10]黃偉, 徐建, 朱大勇,等. 基于粒子群算法的隔振體系參數優(yōu)化研究[J]. 湖南大學學報:自然科學版, 2014, 41(11):58-66.
HUANG Wei, XU Jian, ZHU Dayong,et al. Parameters optimization on particle swarm of vibration isolation system based optimization (PSO) algorithm[J]. Journal of Hunan University: Natural Sciences, 2014,41(11):58-66.(In Chinese)
[11]譚平, 寧響亮, 卜國雄,等. 結構主動控制的一體化多目標優(yōu)化研究[J]. 振動工程學報, 2009, 22(6):638-644.
TAN Ping, NING Xiangliang, BU Guoxiong, et al. Integrated design and mult-objective optimization method for active control system[J]. Journal of Vibration Engineering, 2009,22(6):638-644.(In Chinese)
[12]MERZ P, FREISLEBEN B. Fitness landscapes, memetic algorithms, and greedy operators for graph bipartitioning[J]. Evolutionary Computation, 2000,8(1):61-91.
[13]KENNEDY J, EBERHART R. Particle swarm optimization[C]//Proceedings of IEEE International Conference on Neural Networks. New York: IEEE, 1995:1942-1948.
[14]STORN R, PRICE K. Differential evolution: a simple and efficient adaptive scheme for global optimization over continuous spaces[J]. Journal of Global Optimization, 1995,23(4):341-359.
[15]鄭金華.多目標進化算法及其應用[M].北京:科學出版社, 2007:81-82.
ZHENG Jinhua. Multi objective evolutionary algorithm and its application[M]. Beijing: Science Press, 2007:81-82. (In Chinese)
[16]KIRKPATRICK S, GELATT C D, VECCHI M P. Optimization by simulated annealing[J]. Science, 1983,220(4598):671-680.
[17]李麗,牛奔.粒子群優(yōu)化算法[M].北京:冶金工業(yè)出版社, 2009:34-36.
LI Li, NIU Ben. Particle swarm optimization algorithm[M]. Beijing: Metallurgical Industry Press, 2009:34-36.(In Chinese)
[18]OHTORI Y, CHRISTENSON R E, SPENCER JR B F, et al. Benchmark control problems for seismically excited nonlinear buildings[J]. Journal of Engineering Mechanics, 2004,130(4): 366-385.
[19]薛素鐸,王雪生,曹資.基于新抗震規(guī)范的地震動隨機模型參數研究[J].土木工程學報,2003,36(5):5-10.
XUE Suduo, WANG Xuesheng, CAO Zi. Parameters study on seismic random model based on the new seismic code[J]. China Civil Engineering Journal, 2003,36(5):5-10.(In Chinese)