水下GPS定位技術應用研究
2017-06-14 08:04:31伏天淑卞盼盼王英剛周立
環球人文地理·評論版 2017年3期
伏天淑+卞盼盼+王英剛+周立
(1.淮海工學院測繪與海洋信息學院,江蘇 連云港 222001;2.中國礦業大學環境與測繪學院,江蘇 徐州 221000)
摘要:傳統的水下定位系統在布設、維護、回收等方面都存在較大困難,水下GPS定位系統可將水上GPS定位向水下拓展的定位系統,通過GPS定位和水聲定位相組合,可實現靈活、高精度定位,為水下目標提供精準位置信息。
關鍵詞:水下定位;GPS浮標;基線
1、水下GPS定位技術發展
1.1 國外水下GPS定位技術發展
早在1989年,就有人提出了將長基線陣從水底搬到水面上的想法,建立浮標式水面長基線系統,該構想為浮標定位系統奠定了基礎,但當時的GPS系統還正在建設中,無法對浮動的浮標進行高精度實時定位。美國的James Youngberg在1992年初次提出水下GPS的構想。隨后H.THOMAS在1994年發表了“基于水面浮標的先進水下導航技術”一文,文中闡述了使用水下GPS的不同途徑,并提出另外一種水聲測量方,通過水下目標向水面浮標發射定位信號,水面浮標接收到水下信號后可進行位置解算,該方法具有很高的靈活性。1995年,法國ACSA公司研發了第一套GPS智能浮標并海試成功,其定位精度可達1-10m。2001年,該公司為美國海軍開發了全球第一套水下GPS目標跟蹤系統,對水下啞彈爆破、水雷對抗和水下搜救等任務起到很大作用。另外,德的國Arstech公司在2002年也研發了具有類似功能的GPS浮標陣水下定位系統。
1.2 國內水下GPS定位技術
在“十一五”計劃的支持下,我國成功研發了國內首套水下GPS高精度定位導航系統,該系統可實現從水上和水下對目標進行定位、跟蹤,但缺點是系統沒有高度原子鐘并且沒有聲線補償。隨后有人提出GPS定位與水聲定位組合的水下定位系統,該系統以系纜浮標作為中繼站,該系統可使水下目標在潛深狀態就可直接校準慣性導航系統,其測量精度可達到GPS水上定位同一量級;文獻[1]提出一種GPS定位與相對水聲定位系統相組合的水聲定位標校系統,該系統可為海上基準點提供精確大地坐標。總體來說,我國在水下定位技術方面無論是在測量精度,還是水下自動化程度都超過了國外水下GPS系統,研究成果也達到國際領先水平。
2 水下GPS定位模型
以往對浮標基元的定位必須搭載具有測相和測距的的相關設備,耗電大、精度不高,水下目標定位精度較差。而將GPS應用到水下定位,將安裝有GPS接收機的浮標作為基元獲取自身位置信息,通過球面或者雙曲面算法實時解算水下目標位置。按照工作原理水下GPS定位系統分為兩種:基于單個GPS浮標的水下相對定位系統和基于GPS浮標網絡的長基線水下定位系統,與此對應也有兩種定位模型。
2.1 基于單個GPS浮標的水下相對定位模型
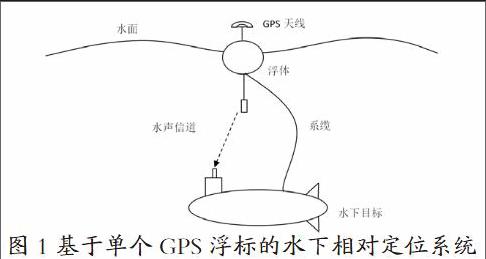
該定位模型工作方式為水下目標拖拽單個智能浮標(GIB),工作靈活且范圍廣[2]。測量浮標到達水下目標距離是在智能浮標和水下目標上分別安裝基線陣和和水聽器,集成GPS定位原理與水聲相對定位(短基線或超短基線定位)原理,水下相對定位系統大多以采用超短基線為主。該種模型可達到水面GPS定位同一量級。系統工作模型如圖1。
系統由搭載GPS接收機的浮體、系纜、水聲發射機和安裝有基線陣的水下目標組成。GPS接收機獲得浮標位置數據,通過系纜將浮標的位置、時間信息等數據實時傳送給水下目標,同時水下目標利用基線陣實時測得目標到浮標的相對位置,結合浮標的GPS定位數據解算出目標絕對位置,從而實現對水下目標的GPS定位。
2.2 基于GPS浮標網絡的長基線水下定位模型
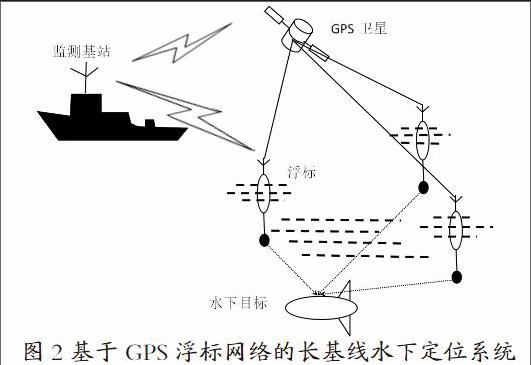
系統主要由GPS浮標陣、水下導航收發機、監測基站、水上無線電通信鏈路和水下水聲通信鏈路組成。該系統實際上可看成將水下長基線定位系統搬到水面上,各系統采用無線連接,水下采用水聲通信鏈路,水上采用無線電通信鏈路。水面浮標可看成GPS衛星,水聲信號可看成GPS無線電信號各浮標基元由其自身安裝的GPS接收機獲取位置,無需矯正。再通過水聲測量技術得到水下目標到各個浮標基元的距離,然后將相關數據通過無線數據鏈路發送給監測基站進行解算。該系統系統工作模型如圖2。
當系統工作時,監測基站將GPS浮標按照一定陣型投放到指定海域。浮標基元通過GPS進行自身定位,并測量出各個浮標基元到達水下目標的距離,將上述兩種數據通過無線鏈路發送至監測基站進行解算。
結語:與傳統水下定位系統相比,水下GPS定位系統可以較好的滿足高精度海洋活動的需求。系統精度主要依賴于高精度浮標定位技術、同步控制和實時定位解算,各國都在加緊對以上關鍵技術的的研究并已經在基元陣型設計、數據傳輸等方面取得些成果。今后的水下GPS定位系統將會向操作性強,精度高、作用范圍大的新一代水下定位系統發展。
參考文獻
[1] 劉百峰. 浮標式短基線定位系統設計[D].哈爾濱:哈爾濱工程大學,2012.
[2] 張加全,劉明雍,李聞白. 一種基于單移動GPS智能浮標的AUV導航方法[J]. 魚雷技術,2010,18(2):123-127.