雙聲納探頭差動掃描的掛舷式船舶吃水測量方法*
2017-06-09 08:53:29舒岳階周遠航
傳感器與微系統(tǒng) 2017年6期
吳 俊, 舒岳階, 周遠航
(1.重慶交通大學 西南水運工程科學研究所,重慶 400016; 2.重慶交通大學 內(nèi)河航道整治技術交通運輸行業(yè)重點實驗室,重慶 400074)
雙聲納探頭差動掃描的掛舷式船舶吃水測量方法*
吳 俊1,2, 舒岳階1, 周遠航1
(1.重慶交通大學 西南水運工程科學研究所,重慶 400016; 2.重慶交通大學 內(nèi)河航道整治技術交通運輸行業(yè)重點實驗室,重慶 400074)
針對現(xiàn)有船載式船舶吃水測量方法的局限,提出了一種基于雙聲納探頭差動掃描的掛舷式船舶吃水測量方法。在詳細分析船舶弧形輪廓外形基礎上,利用雙聲納探頭差動掃描技術,建立測量船舶吃水量的數(shù)學模型,設計了一種船舶吃水測量方法。設計了實驗方案,搭建了小比尺船模吃水深度實驗系統(tǒng),獲取了小比尺船模吃水深度,通過對5組吃水測量結果的統(tǒng)計分析發(fā)現(xiàn),小比尺船模吃水深度測量最大相對誤差為4.87 %,精度較高,滿足實際工程誤差要求,驗證了該設計方案的可行性。
船舶工程; 超吃水; 超聲波; 回波; 船舶吃水
0 引 言
大型船舶的“超吃水”問題已經(jīng)成為航道主管部門關注的重大問題[1]。現(xiàn)有船舶吃水深度檢測方法主要可分為兩類:1)固定式,主要包含側壁聲吶陣列固定測量法、水底聲吶陣列固定測量法與雙測深儀檢測法。該類方法需將測量裝置固定在航道某個位置,安裝和維護麻煩,而且由于枯水期危險淺灘具有分散性,固定安裝方式不能靈活地對航道中疑似超吃水船舶進行隨機抽查[2~7]。2)船載式,主要為圖像法與多波束側掃聲吶,該類裝置可安裝在執(zhí)法船上,靈活對船舶進行吃水深度測量,但是圖像法受限條件較多,測量精度不高,多波束側掃聲吶完全依賴進口,價格極為昂貴,且在寬淺河道使用時易受混響信號影響,所以,多波束聲吶側掃測量方法難以在內(nèi)河航道推廣使用[8~10]。
通過比較固定式與船載式兩種測量方法,不難發(fā)現(xiàn)船載式船舶吃水測量方法靈活、方便,直接搭載在執(zhí)法船上即可流動測量,代表了船舶吃水測量技術的發(fā)展方向。本文針對現(xiàn)有船載式船舶吃水測量方法的局限,提出了一種結構簡單、成本較低的搭載式船舶吃水測量新方法。實驗結果表明,測量最大相對誤差為4.87 %,滿足工程應用要求。
1 船舶吃水測量基本原理
基于雙超聲探頭差動掃描的掛舷式船舶吃水測量方法如圖1所示,測量裝置直接安裝固定在執(zhí)法船的船舷上,包含電機、豎向?qū)к墶⑹瞻l(fā)式超聲探頭、接收型超聲探頭、控制部件與信號處理部分。以水面作為船舶吃水測量的基準面,收發(fā)式超聲探頭與接收型超聲探頭可在軟件控制下沿導軌豎向差動掃描測量,實現(xiàn)對船舶吃水深度的測量。
如圖1(a)所示,當超聲波波束以水平方向投射在其垂直區(qū)域上時,僅收發(fā)式超聲波探頭即可獲取到有效回波信號;當掃描階段進入船舶殼體下部弧面區(qū)域后,如圖1(b)所示,由于回波信號與超聲波波束信號之間存在夾角,當夾角達到一定數(shù)值后,收發(fā)式超聲波探頭無法獲取到有效回波信號,此時,通過使收發(fā)式超聲波探頭駐停在信號跳變位置,同時控制接收型超聲波探頭向下移動以尋找有效回波信號,當接收型超聲波探頭尋找到有效回波信號后,根據(jù)超聲波定位原理以及簡單的幾何關系,確定出反射面的位置,最終根據(jù)掃描過程中記錄到的反射面位置復原出船舶的外壁輪廓,進而檢測出船舶的吃水深度。
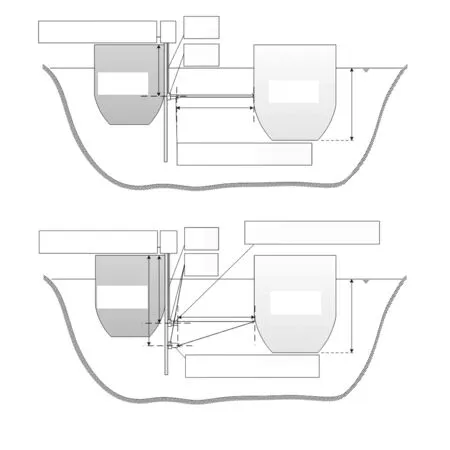
圖1 測量原理
當收發(fā)式超聲波探頭工作在被測船弧形區(qū)域時,由于超聲波反射平面為弧形,因此,收發(fā)式超聲波探頭、接收型超聲波探頭和反射面三者的位置構成直角三角形[11]。
設絲杠對應步進電動機行程為l0/脈沖,信號控制器向收發(fā)式超聲波探頭滑塊發(fā)出脈沖數(shù)為n1,則收發(fā)式超聲波探頭距離執(zhí)法船面距離h1為
h1=l0n1
(1)
設絲杠對應步進電動機行程為l0/脈沖,信號控制器向接收型超聲波探頭滑塊發(fā)出脈沖數(shù)為n2,則接收型超聲波探頭距離執(zhí)法船面距離h2為
h2=l0n2
(2)
設超聲波波速為v1,發(fā)射和接收超聲波時間差為t2,則超聲波的行程s為
s=v1t2
(3)
根據(jù)圖1(b)所示形成的三角關系可得
(s-L)2=L2+(h2-h1)2
(4)
化解式(4)可得收發(fā)式超聲波探頭與超聲波反射面之間的水平距離L為
(5)
根據(jù)圖1以及式(1)、式(5)可以實時計算出被測船相對于執(zhí)法船的輪廓點,其每一時刻輪廓點坐標值為(L(t),h1(t));根據(jù)實時輪廓點繪制出被測船輪廓線,并且找出輪廓線最低點,計算出被測船舶吃水深度h1(n1)。
2 船舶吃水測量系統(tǒng)組成及算法研究
2.1 船舶吃水測量系統(tǒng)組成
船舶吃水測量系統(tǒng)主要由信號處理控制器、步進電機、導軌、絲杠、滑塊、收發(fā)式超聲波探頭、接收型超聲波探頭組成,具體船舶吃水測量系統(tǒng)如圖2所示。
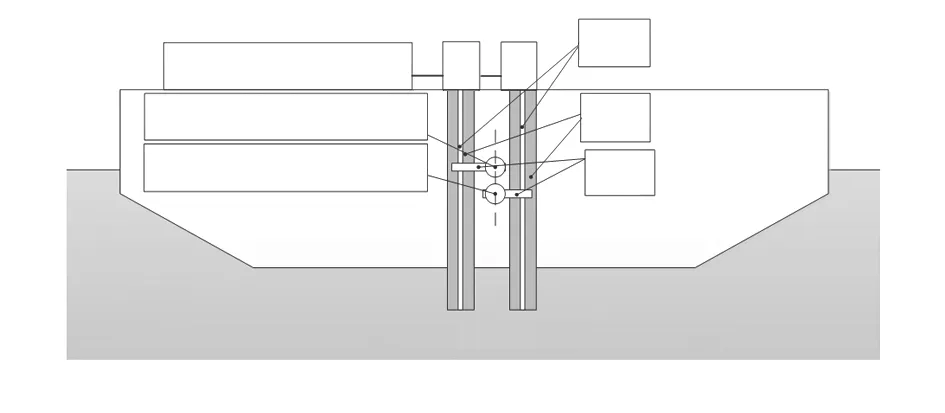
圖2 船舶吃水深度測量系統(tǒng)組成示意
傳動裝置和滑塊均設置于支架外側面上,支架內(nèi)側面與執(zhí)法船側舷連接;傳動裝置與滑塊通過絲杠副連接,并且2個滑塊的運動范圍相同;收發(fā)式超聲波探頭設置于一個滑塊上,接收型超聲波探頭設置于另一個滑塊上;收發(fā)式超聲波探頭和接收型超聲波探頭運動軌跡同軸線如圖3所示。步進電動機通過絲杠副將轉動轉換為滑塊直線運動從而實現(xiàn)滑塊的往復直線運動。
2.2 船舶吃水測量算法研究
執(zhí)法船檢測被測船吃水深度的具體方法如圖3。
1)檢測開始,收發(fā)式超聲波探頭發(fā)射超聲波并獲取回波信號,同時,收發(fā)式超聲波探頭下移并且記錄脈沖數(shù)n1。
2)若收發(fā)式超聲波探頭始終能收到回波信號并且其下移至最大行程位置處,則根據(jù)式(1)計算吃水深度;若在下移過程中收發(fā)式超聲波探頭回波信號消失則駐停,并且啟動接收型超聲波探頭下移,若接收型超聲波探頭下移至最大行程位置處時仍無法收到回波信號,則根據(jù)式(1)計算吃水深度;若接收型超聲波探頭下移過程中收到了回波信號,則接收型超聲波探頭在該位置處駐停。
3)收發(fā)式超聲波探頭繼續(xù)下移,若其下移至最低處時,接收型超聲波探頭仍能接收到回波信號,則根據(jù)式(1)計算吃水深度;收發(fā)式超聲波探頭在下移過程中若接收型超聲波探頭回波信號消失,則收發(fā)式超聲波探頭駐停,接收型超聲波探頭繼續(xù)下移;若接收型超聲波探頭下移至最低處時仍無法收到其回波信號,則根據(jù)式(1)計算吃水深度;若接收型超聲波探頭下移過程中接收型超聲波探頭收到回波信號,則接收型超聲波探頭駐停,返回步驟(3)。
4)檢測過程結束,收發(fā)式超聲波探頭和接收型超聲波探頭關閉并回到初始位置處。
3 實驗研究與結果分析
實驗系統(tǒng)結構如圖4所示,控制器控制收發(fā)式超聲波探頭發(fā)射接收超聲波、步進電機運動以及接收型超聲波探頭接收超聲波。
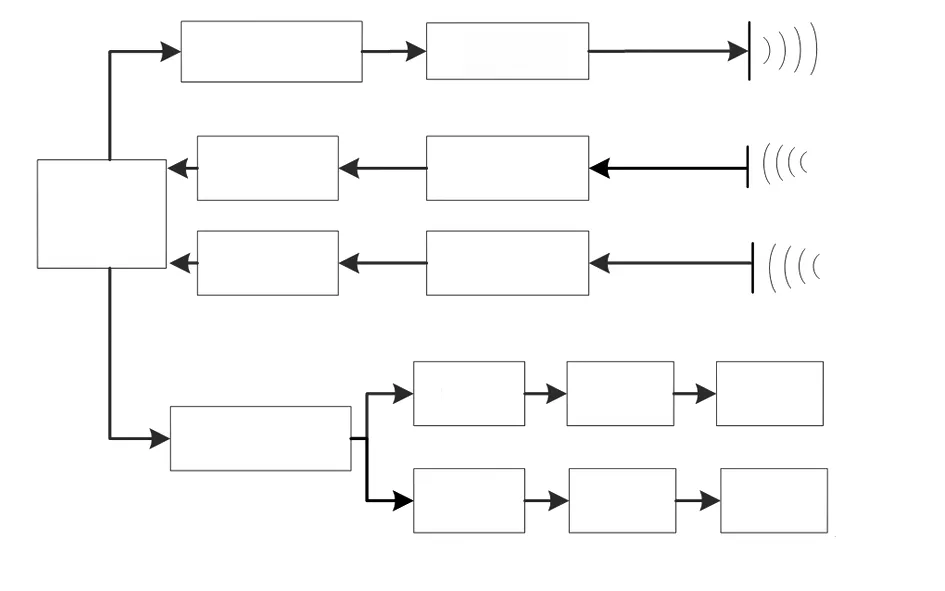
圖4 實驗系統(tǒng)
實驗中,選用主頻為100kHz的收發(fā)式超聲波探頭,其水下有效傳播距離為100m,測量組件的線性掃描精度為0.5mm/脈沖,豎直方向往復掃描量程為25cm。實驗船舶選用川江3 000t級典型船舶,利用其1∶50比尺船模進行實驗,實驗僅在靜水條件下進行。
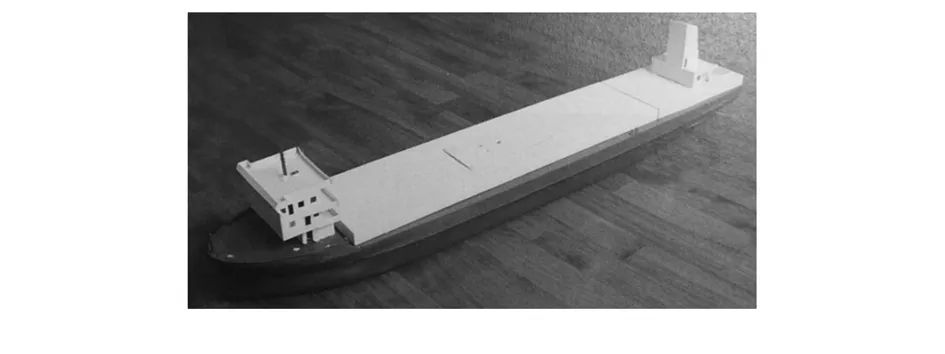
圖5 小比尺船模
實驗以水面作為基準面,掃描脈沖數(shù)等于控制器脈沖累計計數(shù)器數(shù)值,根據(jù)h1=nll0計算船舶吃水深度。對船舶共進行了5次吃水深度測量,實驗結果如表1所示。其中,導軌滑塊運動距離為0.5 mm/脈沖,實際吃水深度為15.4 cm。

表1 測量結果
從實驗結果可以看出,最大相對誤差為4.87 %,滿足實際工程船舶吃水深度測量要求。
4 結束語
本文提出了一種成本較低、安裝簡便、可搭載在執(zhí)法船上進行實時檢測船舶吃水深度的測量系統(tǒng)。對測量系統(tǒng)進行了硬件設計以及測量算法分析,并且設計了小比尺船舶吃水測量實驗獲取了實驗數(shù)據(jù),通過對5組吃水測量結果的統(tǒng)計分析發(fā)現(xiàn),吃水深度測量最大相對誤差為4.87 %,其精度較高可以滿足工程實踐要求,驗證了本文設計方案的可行性。
[1] 童 飛,曾 文.“超吃水”航行管理問題研究[J].中國水運,2008(7):32-33.
[2] 駱國強,朱漢華,陳一奇,等.手持式智能船舶吃水及載重測量儀研制[J].航海工程,2007,36(6):27-29.
[3] 陳文煒,俞 汲,徐 杰,等.一種船舶吃水測量系統(tǒng)[J].中國造船,2013,54(1):166-171.
[4] 吳 俊,丁甡奇,余 葵,等.內(nèi)河離港船舶吃水在線動態(tài)掃描檢測方法[J].水利水運工程學報,2013(5):83-88.
[5] 吳 俊,丁甡奇,余 葵,等.船舶底部縱剖輪廓線掃描測量方法[J].交通運輸工程學報,2014,14(2):62-67.
[6] 孫國元,毛奇凰.自動檢測船舶吃水和穩(wěn)性參數(shù)的方法探討[J].中國航海,2002(2):28-30.
[7] 王 勇,顏昌平.船舶吃水現(xiàn)場檢測技術及方法探討[J].中國水運報,2008(8):44-45.
[8] 熊木地,朱四印,李 祿,等.通航船舶吃水實時檢測系統(tǒng)數(shù)據(jù)處理方法研究[J].儀器儀表學報,2012,33(1):173-180.
[9] 羅 寧.內(nèi)河船舶吃水自動檢測裝置研究及應用前景[J].中國水運,2012,12(2):86-88.
[10] 畢方全,梁 山.船舶“超吃水”航行動態(tài)檢測方法研究[J].中國水運,2011,11(7):1-3.
[11] 閆其年,王 旭.簡易超聲水聽傳感器的設計與制作方法[J].傳感器與微系統(tǒng),2010,29(11):117-119.
Ship’s draft measurement method based on double probe differential scanning sonar for hanging type side ship*
WU Jun1,2, SHU Yue-jie1, ZHOU Yuan-hang1
(1.Southwestert Research Institute of Waterway Engineering,Chongqing Jiaotong University,Chongqing 400016,China; 2.Key Laboratory for Inland Waterway Engineering of Ministry of Transport,Chongqing Jiaotong University, Chongqing 400074,China)
In view of the limitation of the existing ship’s draft measurement methods.A hanging side ship method based on double sonar probe differential scanning is presented to detect the depth of ship’s draft.On the basis of detailed analysis on ship’s curved contour shape,use double sonar differential scanning technology,mathematical model for ship’s draft measurement is set up,design a draught measurement method of ship.Through statistical analysis on 5 groups of draft measurement results,it is found that the maximum relative error is only 4.87 %,and the precision is higher than the actual engineering error,which verifies the feasibility of the design scheme.
ship engineering; super draft; ultrasonic; echo; ship’s draft
2016—07—05
重慶市基礎與前沿計劃資助項目(CSTS 2014JCYJA70006);重慶市教委科學技術研究項目(KJ1500514)
10.13873/J.1000—9787(2017)06—0032—03
U 666
A
1000—9787(2017)06—0032—03
吳 俊(1981-),男,工學博士,副研究員,主要從事水運航道工程相關測量技術研究工作,E—mail:wujun_gd@126.com。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數(shù)理化·七年級數(shù)學人教版(2020年11期)2020-12-14 06:59:52
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
