基于Bouc-Wen類遲滯模型的壓電微動臺建模*
2017-06-09 08:53:29楊曉京彭蕓浩
傳感器與微系統 2017年6期
楊曉京, 彭蕓浩, 李 堯
(昆明理工大學 機電工程學院,云南 昆明 650504)
基于Bouc-Wen類遲滯模型的壓電微動臺建模*
楊曉京, 彭蕓浩, 李 堯
(昆明理工大學 機電工程學院,云南 昆明 650504)
針對壓電微動臺驅動時,由壓電陶瓷產生的遲滯現象,提出了一種遲滯模型。基于Bouc-Wen遲滯模型的基本思想,并針對Bouc-Wen遲滯模型進行了優化改進,大大降低了模型參數的辨識難度,縮短了運算時間,保證了模型的較高精度要求。為了驗證模型的正確性,運用相關的實驗設備對模型進行了實驗驗證。結果表明:改進后的模型定位誤差為0.186 6 μm,最大相對誤差為0.467 %,驗證了模型具有較高的精度以及該遲滯模型的可行性,為后續壓電微動臺控制器的設計提供了一種可行方案。
壓電微動臺; Bouc-Wen模型; 壓電遲滯建模
0 引 言
隨著超精密加工制造技術、微納定位技術等技術的發展,與之對應的微機電系統(MEMS)技術也取得了較快的進步。基于壓電陶瓷驅動器的壓電微動臺便是其中的典型代表。壓電微動臺是由柔性鉸鏈機構構成,由壓電陶瓷提供驅動力的微定位精密機構,具有分辨率高、無摩擦、響應快、無噪音等優點。但由于壓電陶瓷本身具有遲滯特性,使得壓電微動臺的定位精度大大降低。為了提高其控制精度,就必須對遲滯特性進行數學建模。在現有的研究中,建模的方式主要集中在Preisach模型[1]、Prandtle-Ishlinskii模型[2]、Maxwell模型[3]等模型上,但由于數學理論發展的限制,使得這些模型的精度也達到了極限。近年來,一些學者引入了一些新興的遲滯模型,如Bouc-Wen模型[4]、LuGre模型[5]等,并取得了較好的效果。
本文以Bouc-Wen模型為基礎,對該模型進行了改進,在不降低模型精度的情況下,大大降低了模型參數的辨識難度,縮短了運算的時間,為壓電陶瓷遲滯模型的建立提供了一種模型參考。
1 Bouc-Wen類遲滯模型基本原理
壓電微動臺主要由壓電驅動器和柔性鉸鏈組成,其特性主要有遲滯性與蠕變性。為了減小遲滯性與蠕變性對平臺定位精度的影響,提高平臺的定位精度,需要對壓電微動臺的遲滯曲線進行數學建模。
如圖1所示,為壓電微動臺的遲滯曲線。圖中虛線為遲滯曲線最低點與最高點的連線。Bouc-Wen模型認為,遲滯曲線由線性部分與遲滯分量部分組成,其中線性部分為
XL=kvu(t)+x0
(1)
式中kv為待求參數;u(t)為輸入電壓;x0為初始位移。

圖1 壓電微動臺輸入電壓與輸出位移的遲滯曲線
遲滯部分為h(t),h(t)的一階導數如下[6]

(2)
式中 A,β,λ為待求參數。由此,即可得到壓電微動臺遲滯特性的Bouc-Wen模型表達式
X(t)=XL+h(t)=kvu(t)+x0+h(t)
(3)
由式(3)可見,Bouc-Wen模型的參數辨識比較復雜,運算量相對較大。因此,結合Bouc-Wen模型的基本思想,對模型進行改進。線性部分寫成
XL=au(t)+x0
(4)
線性部分可由Matlab線性擬合得到參數a。
遲滯分量如圖2所示,將遲滯分量曲線分為上升段與下降段,并分別用Fourier函數對其進行曲線擬合,其形式如下
h(t)=a0+a1cos[u(t)ω]+b1sin[u(t)ω]+…+ ancos[n·u(t)ω]+bnsin[n·u(t)ω]
(5)
式中的各個參數可由Matlab辨識。

圖2 遲滯分量曲線
將式(4)、式(5)相加,便可得到變換后的Bouc-Wen模型為
X(t)=au(t)+h(t)+x0
(6)
改進后的模型,大大降低了參數辨識的難度,提高了運算的速度。同時,改進后模型的逆模型也容易得到,為后續壓電微動臺控制器的設計提供了模型基礎。
2 模型參數辨識
實驗裝置由三維壓電微動臺XP—611.XYZ,XE—500/501 D系列壓電陶瓷控制器(由哈爾濱芯明天公司生產)組成。實驗時,以X軸為實驗對象。壓電微動平臺X軸的基本參數如下:輸入電壓為0~150 V;最大輸出位移為120×(1±20 %)μm;開環定位分辨率為0.2 nm;XE—500/501 D系列壓電陶瓷控制器由三部分組成,分別為:放大器模塊、傳感器控制模塊、顯示與接口模塊。實驗時,編寫基于LabVIEW的數據采集程序,并將壓電陶瓷控制器分別與計算機、壓電微動臺相連,進行壓電微動臺的控制及數據采集工作。

3 實驗驗證
為了驗證模型的正確性,將得到的遲滯模型與實際測量值進行對比,結果如圖3、圖4和圖5所示。
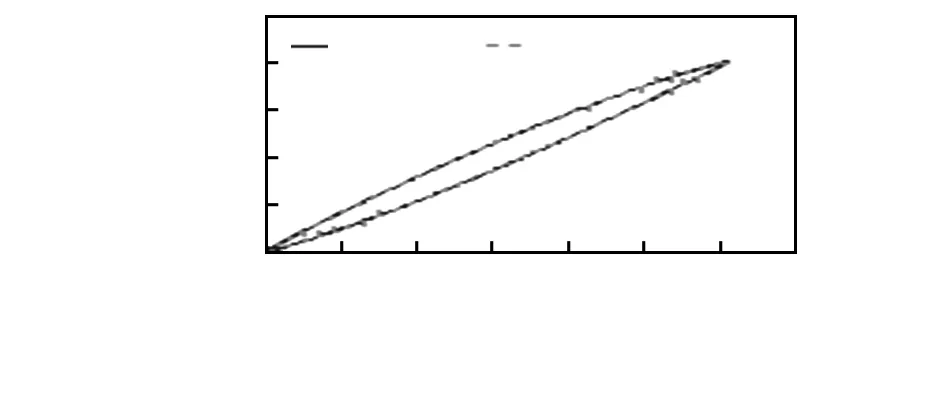
圖3 模型與實際遲滯環

圖4 模型遲滯分量與實際遲滯分量
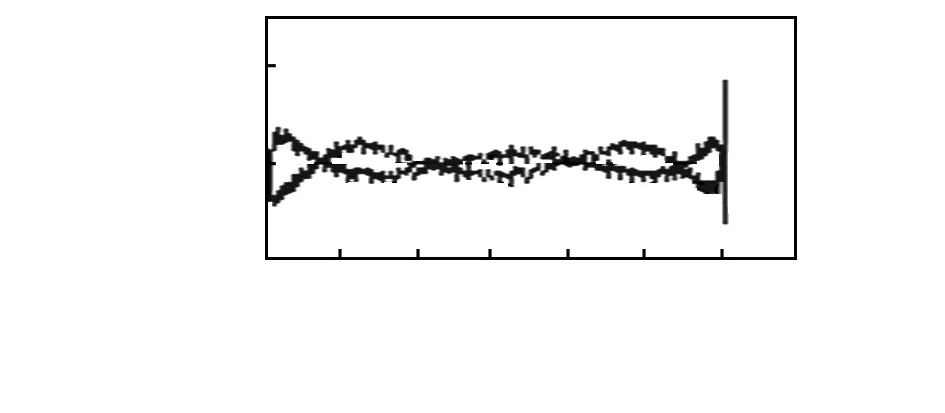
圖5 模型與實際位移的誤差
4 結 論
本文通過改進Bouc-Wen模型的建模方式,建立了一種遲滯模型,從而大大降低了原模型的參數辨識難度,減小了運算量。通過實驗可得,改進后的模型定位誤差為0.186 6 μm,最大相對誤差為0.467 %,驗證了模型的精確度,為后續壓電微動臺控制器的設計提供了一種基礎模型。
[1] 李 黎,劉向東,王 偉,等.壓電陶瓷執行器遲滯特性的廣義非線性Preisach模型及其數值實現[J].光學精密工程,2007,15(5):706-712.
[2] 方 凡,崔玉國,梁冬泰,等.壓電微動平臺的改進PI遲滯模型研究[J].壓電與聲光,2014,36(1):69-75.
[3] 秦月霞,胡德金.壓電驅動器的非線性建模[J].上海交通大學學報,2004,35(8):1334-1341.
[4] 袁 剛,張小波,王代華,等.壓電式快速控制反射鏡的遲滯特性及線性化[J].光學精密工程,2015,23(6):1650-1656.
[5] Canudas de Wit C,Olsson H,Astrom K J.A new model for control of systems with friction[J].IEEE Transactions on Automatic Control,1995,40(3):419-425.
[6] Bouc R.Forced vibration of mechanical systems with hystere-sis[C]∥Proceedings of the 4th Conference on Nonlinear Oscillations,Prague,Czechoslovakia,1967:315.
Modeling of piezoelectric micro machine based on Bouc-Wen hysteresis model*
YANG Xiao-jing, PENG Yun-hao, LI Yao
(School of Mechanical and Electrical Engineering,Kunming University of Science and Technology,Kunming 650504,China)
A hysteresis model is proposed,aiming at hysteresis of piezoelectric ceramic.The model is based on the basic idea of Bouc-Wen hysteresis model,and the optimization of Bouc-Wen hysteresis model is carried out.The identification difficulty of model parameters is greatly reduced, and the computation time is reduced.It also ensures the high precision of the model.In order to verify the correctness of the model,the model is validated by experiments.The results show that localization error of the improved model is 0.186 6 μm, and the maximum relative error is 0.467 %.The model is proved to has high precision and the feasibility of this model is verified,and a feasible scheme is provided for the design of the controller of the piezoelectric micro machine.
piezoelectric micro machine; Bouc-Wen model; piezoelectric hysteresis modeling
2016—06—13
國家自然科學基金資助項目(51365021)
10.13873/J.1000—9787(2017)06—0026—02
TP 271.4; TH 701
A
1000—9787(2017)06—0026—02
楊曉京(1971-),男,博士,博士后,教授,博士生導師,主要從事微機電系統、機電液精密驅動與傳動等研究工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
