球齒輪在車載雷達(dá)中的應(yīng)用分析
2017-06-07 10:22:13王白王譚曉明馬鵬
科技與創(chuàng)新 2017年10期
王白王++譚曉明++馬鵬
摘 要:以漸開線球齒輪齒盤機(jī)構(gòu)為研究對(duì)象,對(duì)其運(yùn)動(dòng)規(guī)律進(jìn)行了理論分析。通過SolidWorks建模,基于ADMAS仿真環(huán)境,對(duì)該機(jī)構(gòu)的運(yùn)動(dòng)進(jìn)行了仿真分析,驗(yàn)證了該機(jī)構(gòu)的運(yùn)動(dòng)規(guī)律。研究了車載雷達(dá)的相關(guān)理論,提出了將球齒輪應(yīng)用在車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)上的新思路,分析了可能產(chǎn)生誤差的原因,為提高車載雷達(dá)運(yùn)動(dòng)精度提供了新思路,對(duì)球齒輪齒盤機(jī)構(gòu)在其他領(lǐng)域的應(yīng)用也有一定的參考價(jià)值。
關(guān)鍵詞:球齒輪;齒盤;車載雷達(dá);轉(zhuǎn)動(dòng)機(jī)構(gòu)
中圖分類號(hào):TH132.4 文獻(xiàn)標(biāo)識(shí)碼:A DOI:10.15913/j.cnki.kjycx.2017.10.036
20世紀(jì)90年代,國(guó)防科技大學(xué)潘存云教授發(fā)明了一種新型的雙自由度齒輪傳動(dòng)機(jī)構(gòu)——漸開線球齒輪機(jī)構(gòu),它可以實(shí)現(xiàn)連續(xù)傳動(dòng),解決了離散齒球齒輪存在的傳動(dòng)原理誤差和難以加工的問題。該機(jī)構(gòu)是一種具有2個(gè)傳動(dòng)自由度,可用來傳遞二維回轉(zhuǎn)運(yùn)動(dòng)的新型齒輪機(jī)構(gòu),在改變機(jī)構(gòu)傳動(dòng)方向上有獨(dú)特的優(yōu)勢(shì)。當(dāng)一個(gè)球齒輪齒數(shù)為無窮多時(shí),其分度球半徑將趨于無窮大,球齒輪機(jī)構(gòu)就演變成了球齒輪齒盤機(jī)構(gòu),實(shí)現(xiàn)球面運(yùn)動(dòng)與平面運(yùn)動(dòng)之間的轉(zhuǎn)換。球齒輪齒盤機(jī)構(gòu)的運(yùn)動(dòng)特性滿足車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)的要求,因此,本文將該機(jī)構(gòu)應(yīng)用在車載雷達(dá)上,以滿足車載雷達(dá)對(duì)運(yùn)動(dòng)的要求。
雷達(dá)在飛機(jī)、艦艇、戰(zhàn)車等武器裝備中廣泛應(yīng)用,因此,提高我國(guó)雷達(dá)的性能,對(duì)增強(qiáng)我國(guó)的偵查、預(yù)警、識(shí)別能力等有重大意義。為了獲取信息,雷達(dá)需要發(fā)出并接收反饋的信號(hào),這對(duì)雷達(dá)的俯仰角和旋轉(zhuǎn)角有一定的技術(shù)要求。球齒輪齒盤機(jī)構(gòu)的傳動(dòng)形式比較簡(jiǎn)單,只需要對(duì)齒盤進(jìn)行2個(gè)方向的輸入,就可以輸出相應(yīng)的球齒輪的轉(zhuǎn)動(dòng),且傳動(dòng)平穩(wěn)、精度高,有利于提高其動(dòng)態(tài)性能。
本文通過SolidWorks建模、ADAMS仿真,研究球齒輪齒盤機(jī)構(gòu)的運(yùn)動(dòng)形式和規(guī)律;然后在仿真環(huán)境中向球齒輪輸入設(shè)定的軌跡,以觀察齒盤的運(yùn)動(dòng)規(guī)律;最后將齒盤的運(yùn)動(dòng)參數(shù)轉(zhuǎn)
化為電機(jī)的轉(zhuǎn)動(dòng)參數(shù),用C語言編程,控制該機(jī)構(gòu)按照設(shè)定軌跡運(yùn)動(dòng)。
1 車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)原理分析
車載雷達(dá)要求雷達(dá)在使用的過程中能夠快速展開,需要準(zhǔn)確、及時(shí)地調(diào)整天線的角度,這就對(duì)轉(zhuǎn)動(dòng)機(jī)構(gòu)提出了比較高的要求。本文采用的球齒輪齒盤機(jī)構(gòu)有大范圍的俯仰角,可以實(shí)現(xiàn)360°無死角轉(zhuǎn)動(dòng)。該機(jī)構(gòu)所需部件少、傳動(dòng)形式簡(jiǎn)單、精度高,可以很好地滿足這一性能指標(biāo)。
1.1 漸開線球齒輪形成原理
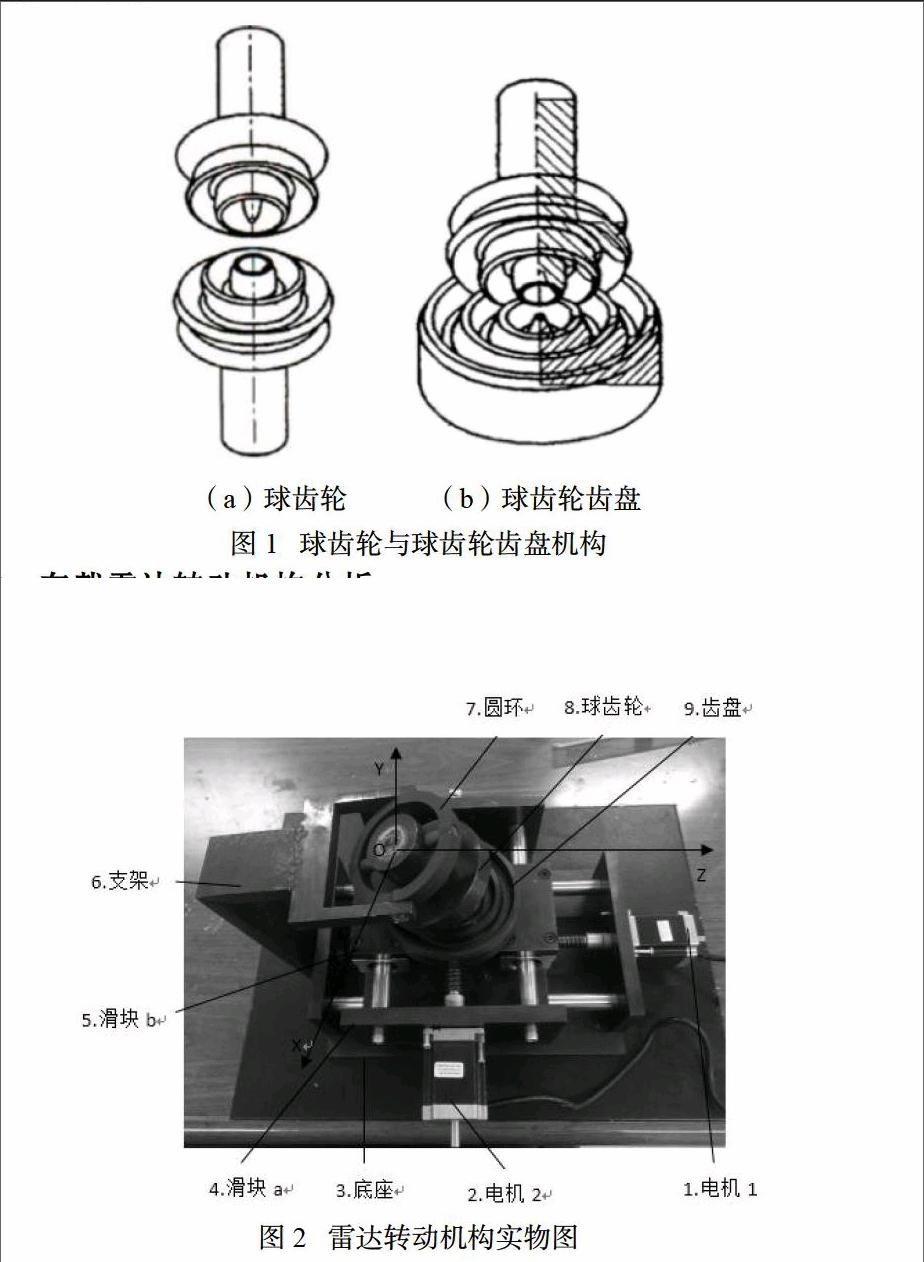
圖1(a)為一對(duì)圓柱齒輪嚙合,在圖示位置時(shí),兩齒輪中心連線剛好與兩齒輪的極軸重合。將這一對(duì)相互嚙合的圓柱齒輪剖面所在的平面齒輪繞極軸旋轉(zhuǎn)360°,便得到一對(duì)相互嚙合的球齒輪。對(duì)于圓柱齒輪中有關(guān)的各種圓,此時(shí)全部演變?yōu)橄鄳?yīng)的球。如圖1(b)所示,當(dāng)其中一個(gè)球齒輪的齒數(shù)無窮多時(shí),其分度球半徑也將會(huì)趨于無窮大,則球齒輪演變成齒盤,球齒輪機(jī)構(gòu)演變成球齒輪齒盤機(jī)構(gòu)。其中,齒盤做平面運(yùn)動(dòng),球齒輪做球面運(yùn)動(dòng)。該機(jī)構(gòu)可以實(shí)現(xiàn)平面運(yùn)動(dòng)與球面運(yùn)動(dòng)之間的相互轉(zhuǎn)換。
1.2 車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)分析
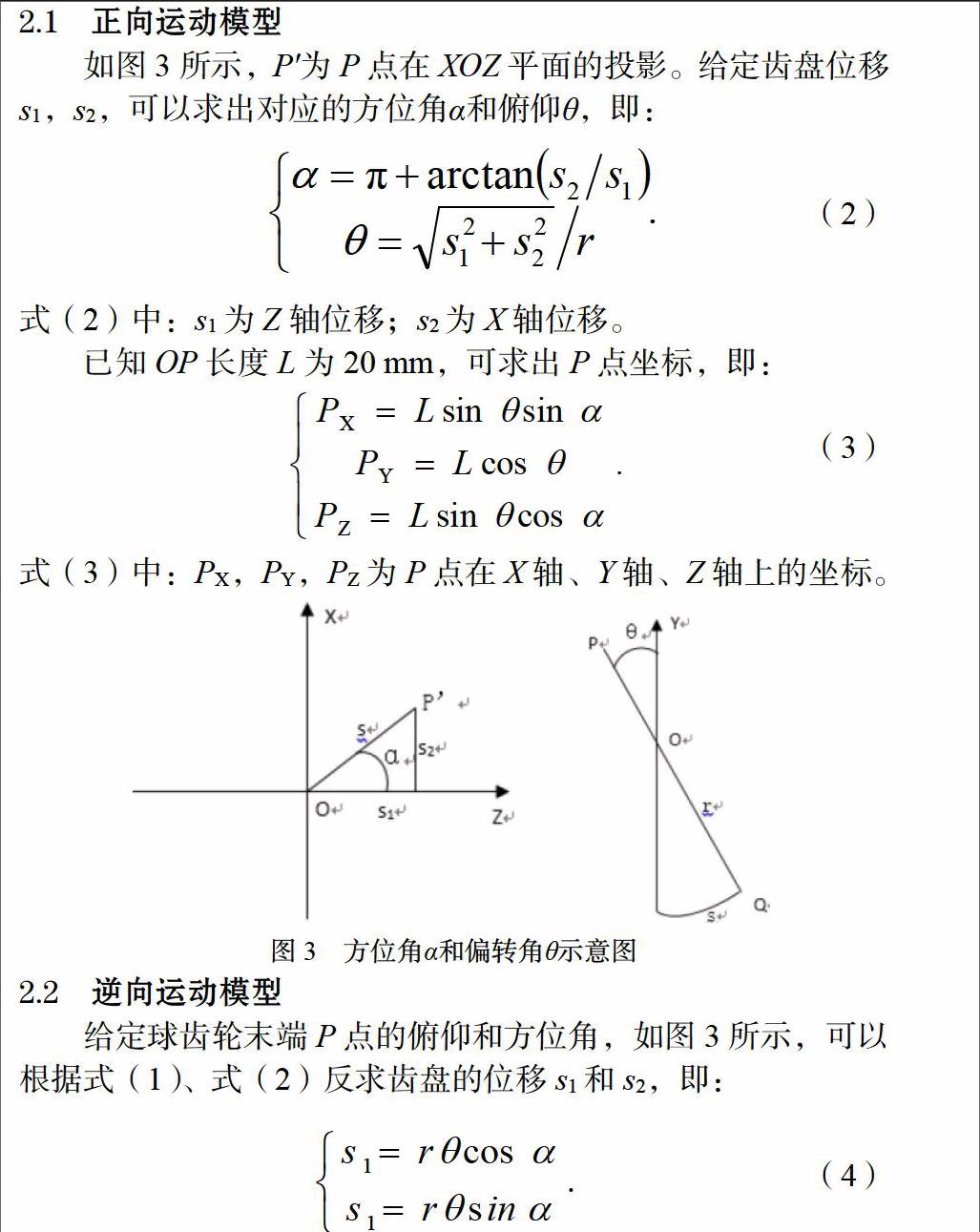
圖2為車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)的實(shí)物圖,以圓環(huán)中心為原點(diǎn)建立空間直角坐標(biāo)系。1和2為驅(qū)動(dòng)電機(jī),3為噴泉機(jī)的底座,4為滑塊a,5為滑塊b,6為支架,7為圓環(huán),8為球齒輪,9為齒盤。電機(jī)1驅(qū)動(dòng)滑塊a在底座上沿X軸運(yùn)動(dòng),電機(jī)2驅(qū)動(dòng)滑塊b在滑塊a上沿Z軸運(yùn)動(dòng)。圓環(huán)與支架鉸接,球齒輪通過橫軸與圓環(huán)鉸接,球齒輪可以在空間內(nèi)做兩自由度的轉(zhuǎn)動(dòng),且轉(zhuǎn)動(dòng)中心位于圓環(huán)的中心位置。齒盤與球齒輪嚙合,且齒盤通過螺絲固連在滑塊b上,齒盤隨滑塊b在XOZ平面內(nèi)做兩自由度的平動(dòng)。球齒輪頂部可以加裝雷達(dá)天線,跟隨球齒輪一起轉(zhuǎn)動(dòng)。
電機(jī)通過絲杠滾珠機(jī)構(gòu)驅(qū)動(dòng)滑塊帶動(dòng)齒盤與球齒輪嚙合運(yùn)動(dòng),將齒盤的平動(dòng)轉(zhuǎn)化成球齒輪的轉(zhuǎn)動(dòng)。向電機(jī)輸入給定的參數(shù),球齒輪帶動(dòng)雷達(dá)天線按照設(shè)計(jì)的軌跡運(yùn)動(dòng),從而對(duì)不同方向的信號(hào)作出反饋。
1.3 雷達(dá)控制原理分析
由于車載雷達(dá)體積比較小,質(zhì)量比較輕,對(duì)控制精度的要求比較高,所以,雷達(dá)收放系統(tǒng)、升降系統(tǒng)、轉(zhuǎn)動(dòng)系統(tǒng)等都可以用機(jī)電控制,使雷達(dá)在接收到信號(hào)后可以及時(shí)、準(zhǔn)確作出反應(yīng)。以智能電機(jī)伺服驅(qū)動(dòng)控制器為核心的主控制單元,結(jié)合C語言編寫相關(guān)控制程序,在車載雷達(dá)的操作界面設(shè)置驅(qū)動(dòng)參數(shù)來控制整個(gè)雷達(dá)系統(tǒng)的運(yùn)轉(zhuǎn)。
3 車載雷達(dá)驅(qū)動(dòng)機(jī)構(gòu)建模
漸開線球齒輪和齒盤在ADAMS的數(shù)據(jù)庫里沒有標(biāo)準(zhǔn)件,直接制作比較困難,因此,可先通過SOLIDWORKS軟件生成各個(gè)零部件后進(jìn)行裝配,然后導(dǎo)入到ADAMS中。
3.1 SolidWorks生成球齒輪
在具體工作中,先生成球齒輪。從設(shè)計(jì)庫中選取Gb、動(dòng)力傳動(dòng)和正齒輪設(shè)置參數(shù),生成極薄的標(biāo)準(zhǔn)齒輪;選取其中連續(xù)的齒進(jìn)行拉伸切除,截取輪齒部分再進(jìn)行拉伸切除。在中間齒的標(biāo)示中心線,以中心線為軸進(jìn)行旋轉(zhuǎn)拉伸,在末端圓面拉伸,生成球齒輪三維模型圖。同理,可以生成齒盤。然后,依次生成其他零部件,比如支架、圓環(huán)、滑塊、底座和雷達(dá)天線等。
3.2 ADAMS添加約束
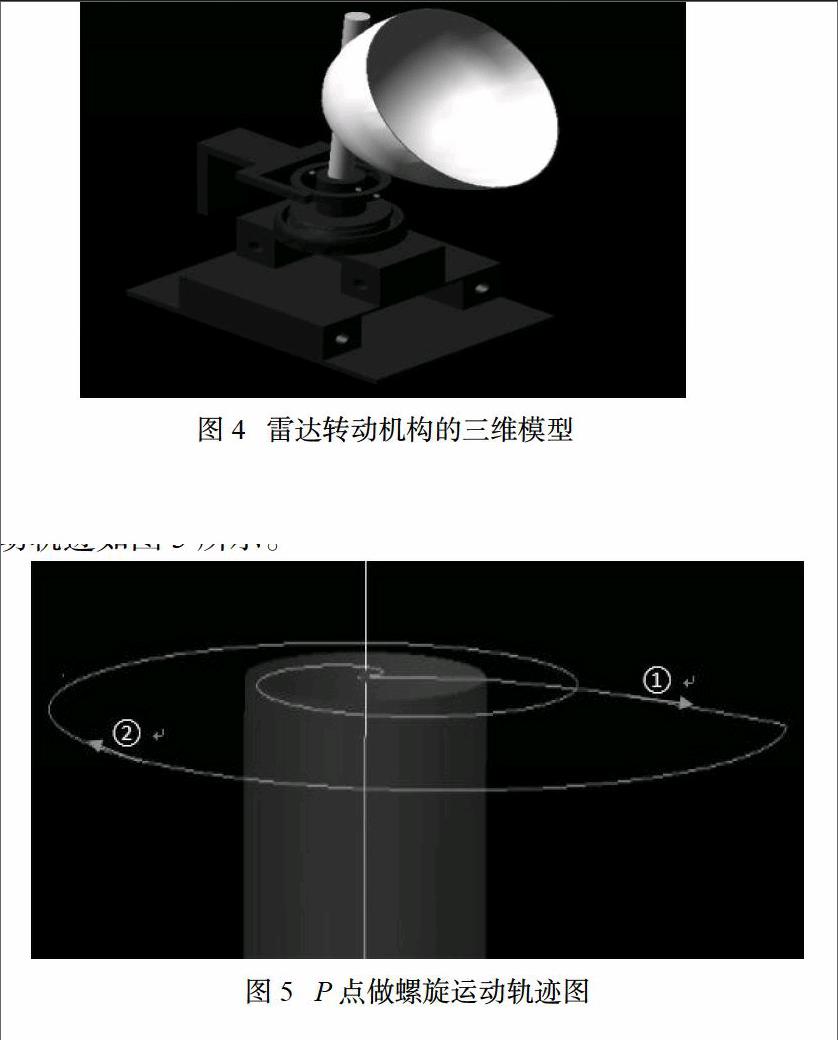
將SolidWorks生成的零件保存為Parasolid格式,然后導(dǎo)入到ADAMS中,修改各個(gè)零部件的材料屬性為”Steel”。然后對(duì)零部件進(jìn)行連接,添加相應(yīng)約束關(guān)系:底座與大地是固定副連接,滑塊a與底座是移動(dòng)副連接,滑塊b與滑塊a是移動(dòng)副連接,球齒輪和齒盤是接觸力連接,球齒輪和雷達(dá)天線是固定副連接,球齒輪和圓環(huán)是旋轉(zhuǎn)副連接,圓環(huán)和機(jī)架是旋轉(zhuǎn)副連接,機(jī)架和大地是固定副連接。圖4為雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu)的三維模型。
4 仿真分析
由式(1)可知,球齒輪齒盤機(jī)構(gòu)的俯仰角的取值范圍與齒盤的位移有關(guān)。根據(jù)式(2)、式(3),可以設(shè)計(jì)出球齒輪末端P點(diǎn)的軌跡,然后將運(yùn)動(dòng)參數(shù)輸入ADAMS仿真環(huán)境進(jìn)行仿真,可以得出齒盤的運(yùn)動(dòng)規(guī)律,繼而求出電機(jī)的變化規(guī)律,用C語言進(jìn)行編程控制。
4.1 螺旋運(yùn)動(dòng)仿真設(shè)計(jì)
設(shè)計(jì)球齒輪的運(yùn)動(dòng)軌跡為:①球齒輪極軸沿X軸正向偏轉(zhuǎn)30°,運(yùn)行2 s;②繞OY軸順時(shí)針轉(zhuǎn)動(dòng)2周,同時(shí),P點(diǎn)沿Y軸正方向上做勻速直線運(yùn)動(dòng),最后回到原點(diǎn),運(yùn)行20 s。P點(diǎn)運(yùn)動(dòng)軌跡如圖5所示。
用ADAMS輸入P點(diǎn)的運(yùn)動(dòng)軌跡,采用一般驅(qū)動(dòng)進(jìn)行仿真運(yùn)動(dòng),可以得到齒盤在X軸和Z軸上的運(yùn)動(dòng)軌跡曲線。
圖6和圖7分別是齒盤在X軸和Z軸上的運(yùn)動(dòng)軌跡仿真曲線和理論計(jì)算曲線,其中,一條曲線是理論值,一條曲線是仿真值。
4.2 仿真結(jié)果分析
從圖6和圖7中可以看出,齒盤在X軸和Z軸上軌跡的理論曲線與仿真曲線幾乎重合。這說明,兩者偏差比較小。經(jīng)過計(jì)算,X軸上理論值與仿真值最大偏差為0.56 mm,Z軸上最大偏差為0.71 mm,滿足車載雷達(dá)運(yùn)動(dòng)控制精度要求。因此,本文所建立的模型是有效的,驗(yàn)證了該機(jī)構(gòu)應(yīng)用在車載雷達(dá)上可以滿足雷達(dá)轉(zhuǎn)動(dòng)時(shí)的俯仰角和方位角要求。在此過程中,出現(xiàn)誤差可能是因?yàn)锳DAMS的裝配過程中產(chǎn)生了誤差,也可能是對(duì)球齒輪和球齒盤相關(guān)數(shù)據(jù)錄入時(shí)不夠精確導(dǎo)致的。因此,基于本文的模型,通過更改相應(yīng)的模型參數(shù),能夠設(shè)計(jì)出不同尺寸的雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu),并將其應(yīng)用在車載雷達(dá)上。
5 結(jié)束語
本文提出了一種基于球齒輪齒盤傳動(dòng)的車載雷達(dá)轉(zhuǎn)動(dòng)機(jī)構(gòu),建立了該機(jī)構(gòu)的運(yùn)動(dòng)學(xué)模型,求出了球齒輪齒盤機(jī)構(gòu)的運(yùn)動(dòng)規(guī)律。通過ADAMS仿真實(shí)驗(yàn),驗(yàn)證了模型的有效性,為車載雷達(dá)運(yùn)動(dòng)控制提供了理論基礎(chǔ)。結(jié)合實(shí)體雷達(dá)的相關(guān)參數(shù),設(shè)計(jì)雷達(dá)天線軌跡,反求出了伺服電機(jī)的變化規(guī)律,為C語言編程控制電機(jī)驅(qū)動(dòng)雷達(dá)轉(zhuǎn)動(dòng)提供了依據(jù)。
參考文獻(xiàn)
[1]潘存云,尚建忠,楊昂岳,等.球齒輪機(jī)構(gòu)及其應(yīng)用[J].機(jī)械科學(xué)與技術(shù),1997(01):43-45.
[2]潘存云,溫熙森.漸開線環(huán)形齒球齒輪傳動(dòng)原理與運(yùn)動(dòng)分析[J].機(jī)械工程學(xué)報(bào),2005(05):1-9.
[3]陳蜻.車載火控雷達(dá)結(jié)構(gòu)造型設(shè)計(jì)[J].火控雷達(dá)技術(shù),2010(04):14-18.
[4]刁世倫,王鵬飛.基于車載雷達(dá)天窗與升降機(jī)構(gòu)機(jī)電控制系統(tǒng)設(shè)計(jì)[J].電子技術(shù)與軟件工程,2015(08):170.
[5]李強(qiáng),潘存云,徐小軍,等.基于球齒輪傳動(dòng)的星載天線定位機(jī)構(gòu)星間通信運(yùn)動(dòng)學(xué)研究[J].國(guó)防科技大學(xué)學(xué)報(bào),2011(06):145-149.
〔編輯:白潔〕