基于RV減速器有限元裝配模型的擺線輪受力分析
2017-06-06 11:57:49吳鑫輝劉珂熒馮長建李文龍
大連民族大學學報 2017年3期
吳鑫輝,劉珂熒,馮長建,李文龍
(1.大連民族大學 機電工程學院,遼寧 大連 116605;2. 大連工業大學 機械工程與自動化學院,遼寧 大連 116034)
基于RV減速器有限元裝配模型的擺線輪受力分析
吳鑫輝1,劉珂熒2,馮長建1,李文龍1
(1.大連民族大學 機電工程學院,遼寧 大連 116605;2. 大連工業大學 機械工程與自動化學院,遼寧 大連 116034)
以工業機器人普遍采用的RV減速器為研究對象,通過考慮RV減速器第一級傳動中太陽輪和行星輪變形,第二級傳動中針齒殼、針齒、擺線輪、曲柄軸承滾子和曲柄軸變形,針齒和針齒孔加工誤差,曲柄軸承間隙及擺線輪與針齒間嚙合側隙,基于有限元法,利用ANSYS APDL建立RV減速器參數化有限元裝配模型。通過有限元仿真分析得出各因素綜合作用下擺線輪齒受力分布及各齒受力大小,總結出擺線輪輪輻結構變形對擺線輪受力的影響規律,為RV減速器擺線輪結構參數優化提供依據。
RV減速器;有限元裝配模型;對擺線輪受力的影響規律;擺線輪;受力分析
隨著工業機器人用RV(Rotate Vector)減速器朝著輕量化的方向發展,擺線輪重量更輕,尺寸更小,輪輻結構柔性更大。現有關于RV減速器擺線輪受力分析的理論大部分都是假設擺線輪為剛體,根據赫茲接觸理論計算擺線輪齒接觸齒數和各齒受力大小[1]。據RV減速器的有限元分析結果顯示,擺線輪的最大變形量達到十幾微米,因此為了準確分析擺線輪受力,必須考慮擺線輪變形。孫宇[2]通過Pro/E進行擺線輪實體建模,利用ANSYS進行有限元分析,分析中將三維模型簡化為平面模型,對擺線輪單獨進行有限元分析;張東生[3]基于傳統受力分析理論,通過MARC軟件對一片擺線輪和針齒殼進行二維接觸分析;吳素珍[4]基于擺線針輪行星傳動的嚙合原理,采用有限元法建立了RV減速器中擺線針輪傳動的有限元模型,分析擺線輪接觸應力;戴文婷[5]在SolidWorks軟件環境下,建立了擺線輪的有限元模型,分析了擺線輪與針輪在輸出軸回轉一周的過程中接觸應力的變化規律。Shuting Li[6]利用有限元方法進行負載工況下擺線輪接觸分析,以解決擺線針輪減速器受力分析與評價的問題,并基于這個模型開發了有限元軟件,從而可以很好地分析擺線輪齒、軸承滾子和柱銷的接觸力和接觸應力分布,也能分析擺線輪的彎曲應力。Blagojevic′ M.和Marjanovic′ N.等[7]利用有限元法分析擺線針輪減速器的應力和應變情況。Thube S.V. 和Bobak T.R.[8]采用有限元法對包含針齒、單片擺線輪和行星架的簡單擺線針輪減速器進行分析,研究擺線輪上的應力和變形在一定仿真時間內的變化規律。RV減速器中擺線輪結構與傳統擺線針輪減速器中擺線輪結構不同,本文考慮關鍵零部件變形、加工誤差和軸承間隙三個因素,通過ANSYS APDL建立RV減速器參數化有限元裝配模型,從而分析擺線輪受力情況。
1 建立有限元模型
1.1 基本參數
RV減速器基本參數見表1,零件材料屬性見表2。
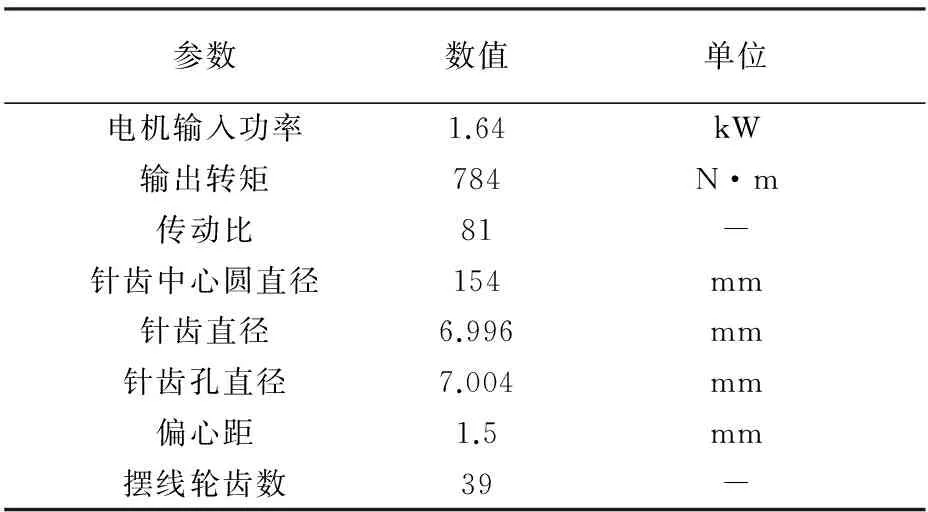
表1 RV減速器基本參數
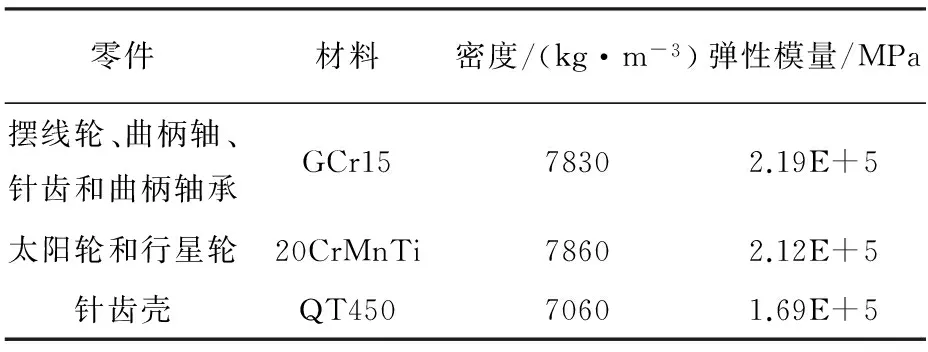
表2 零件材料屬性
1.2 擺線輪模型建立及裝配
機器人用RV減速器是高精密減速器,對建模精度要求很高,本文建模時對擺線齒形曲線進行了精確計算,使其齒形曲線誤差保持在0.3 μm以下,模型如圖1。

圖1 擺線輪齒形曲線
為將擺線輪齒網格劃分為六面體,分別建立擺線輪齒與擺線輪輪輻模型,擺線輪齒網格模型如圖2。由于擺線輪的齒緣較薄,變形比較大,對擺線輪受力有直接影響,因此按圖紙尺寸準確建立擺線輪輪輻實體模型,網格模型如圖3。
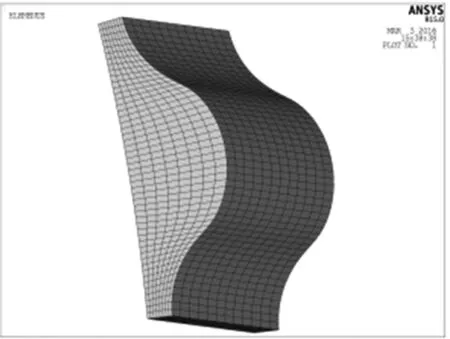
圖2 擺線輪齒網格模型
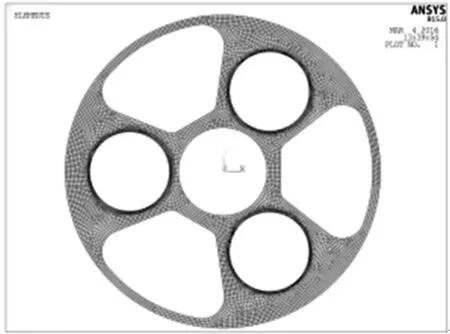
圖3 擺線輪輪輻網格模型
由于擺線輪輪輻與擺線輪齒有限元模型是分別建立的,網格節點不連續,本文采用耦合和約束方程的方法將兩個具有不同網格特征的區域連接起來,如圖4。在輪齒接觸區域內按最大接觸跨齒數(14個)設計擺線齒,兩片擺線輪裝配模型如圖5。
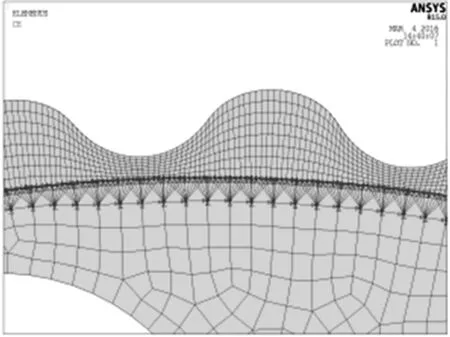
圖4 擺線輪齒與輪輻耦合模型

圖5 兩片擺線輪裝配模型
1.3 針齒殼及針齒模型建立及裝配
為了在不影響計算精度的前提下盡量減少計算時間,把針齒殼簡化成為一個圓柱體,其中針齒孔的直徑為(7+0.004)mm,在輪齒接觸區域內按最大接觸跨齒數設計14個針齒孔。按平均誤差選取針齒直徑為(7-0.004)mm。為了更好地觀察擺線輪的變形等對接觸狀態的影響,建模時沒有計入針齒的綜合周節誤差[9]。針齒與針齒孔接觸區域為復雜應力梯度區域,網格需要細化。采用約束方程將針齒和針齒孔連接起來如圖6,針齒殼與擺線輪裝配模型如圖7。
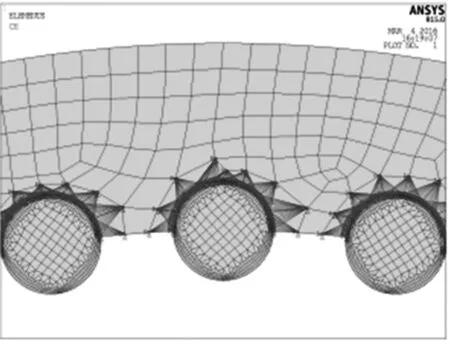
圖6 針齒殼和針齒耦合模型
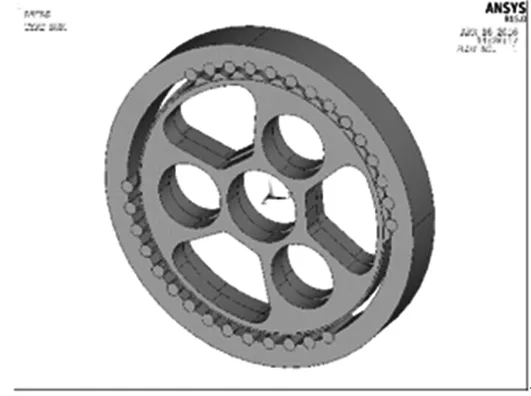
圖7 針齒殼和擺線輪裝配模型
1.4 曲柄軸承模型建立
曲柄軸承的滾柱直徑為5 mm,寬度為8 mm,14個滾柱均勻分布,軸承徑向間隙取0.012 mm(按平均誤差估計半徑間隙0.006 mm),如圖8。
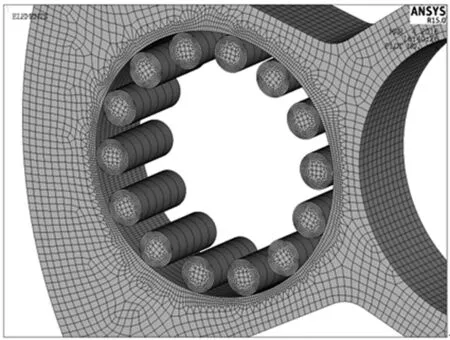
圖8 曲柄軸承滾子網格模型
1.5 曲柄軸模型建立及裝配
曲柄軸為3個,兩偏心凸輪用約束方程約束在曲柄軸上。曲柄軸的網格模型如圖9,裝配后模型如圖10。
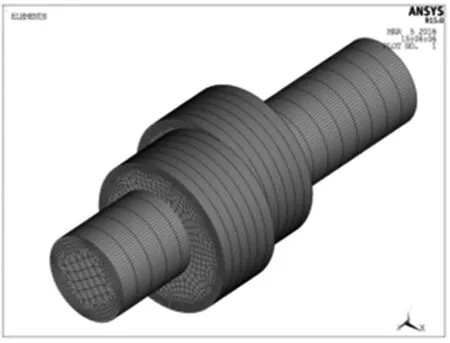
圖9 曲柄軸網格模型
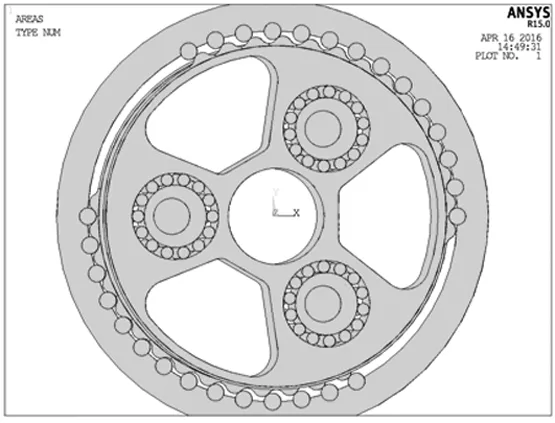
圖10 裝配模型
1.6 第一級漸開線齒輪模型建立
第一級由一個太陽輪軸和三個行星輪構成,為盡量壓縮運算時間,太陽輪只建立16個齒中的9個,每個行星輪只建立32個齒中的3個,太陽輪軸截掉軸段,行星輪通過約束方程固連在曲柄軸上。第一級齒輪網格模型如圖11,裝配后模型如圖12。
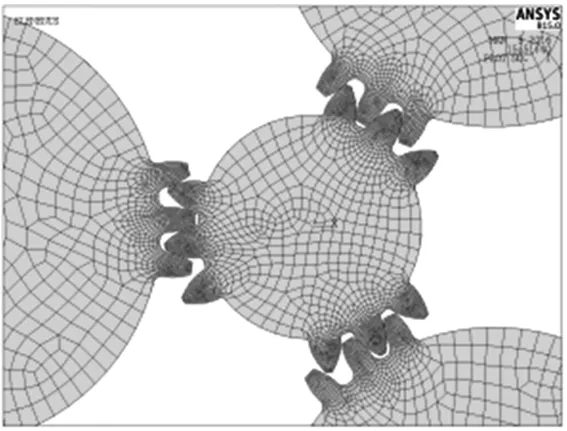
圖11 太陽輪和行星輪網格劃分
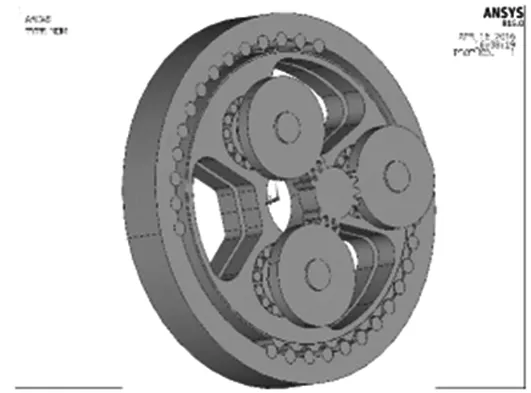
圖12 裝配模型
1.7 RV減速器有限元裝配模型建立
由于行星架剛性較大,將行星架作為一個剛性點,點的單元屬性為MASS21,并用CERIG命令將該點與偏心軸中心各節點剛性連接以代替行星架。RV減速器有限元裝配模型各部件約束關系見表3,零部件接觸關系見表4。
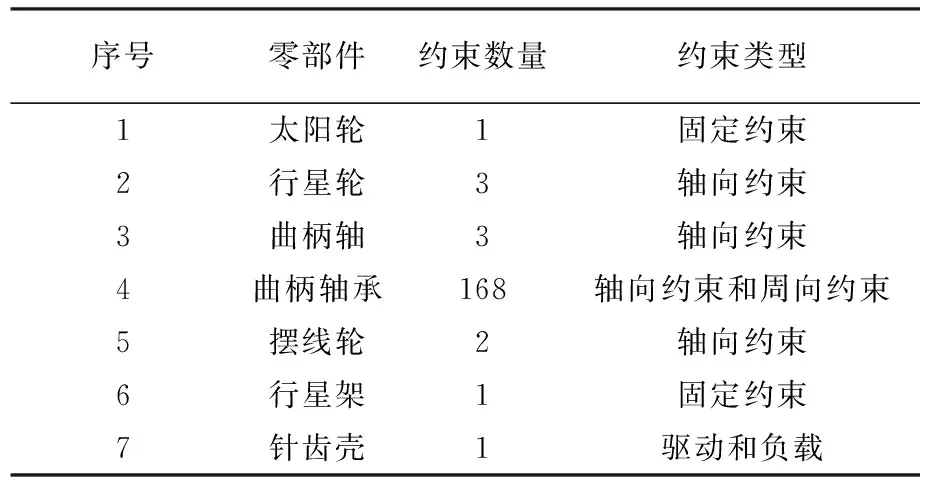
表3 RV減速器有限元裝配模型各部件約束關系
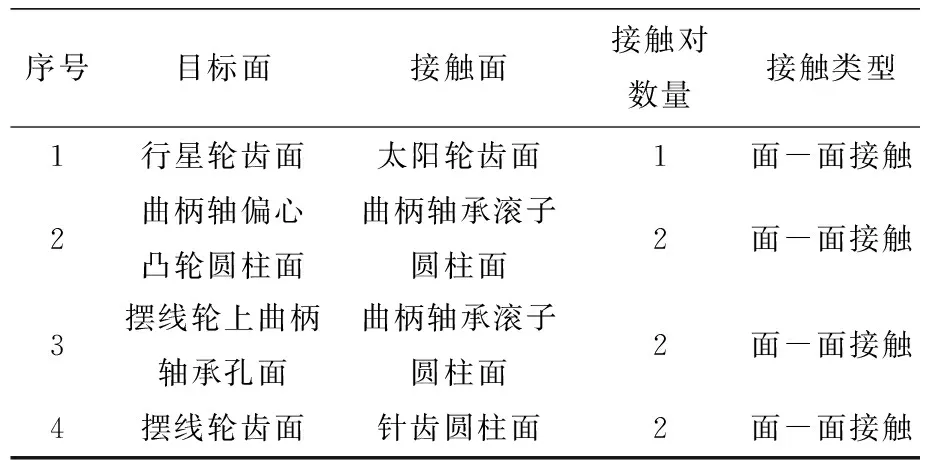
表4 RV減速器有限元裝配模型零部件接觸關系
RV減速器有限元裝配模型共包含158個實體,1 227 915個節點,1 006 668個單元,如圖13。
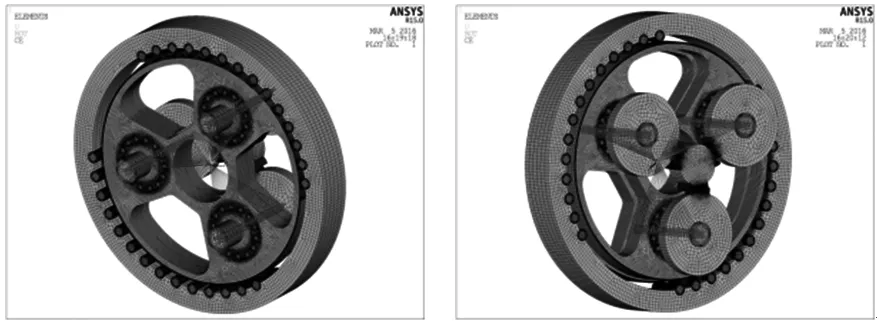
圖13 RV減速器有限元裝配模型
2 RV減速器擺線輪受力分析
通過有限元分析得出輸入端擺線輪和輸出端擺線輪的傳遞轉矩見表5。
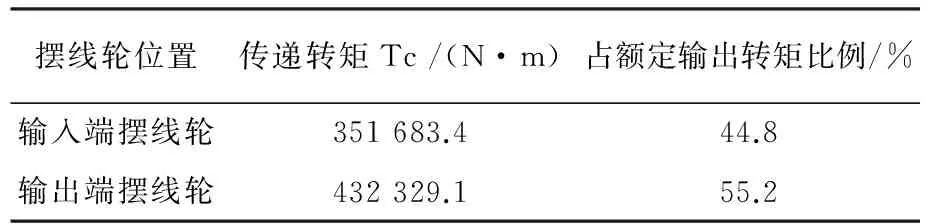
表5 兩片擺線輪分別傳遞的轉矩
輸入端擺線輪與輸出端擺線輪所傳遞轉矩不相同,這是由于針齒和針齒孔加工誤差及軸承間隙等因素影響的結果,與工程實際相符。選取輸出端擺線輪作為研究對象,擺線輪接觸應力分布如圖14,各齒所受接觸力大小見表6。
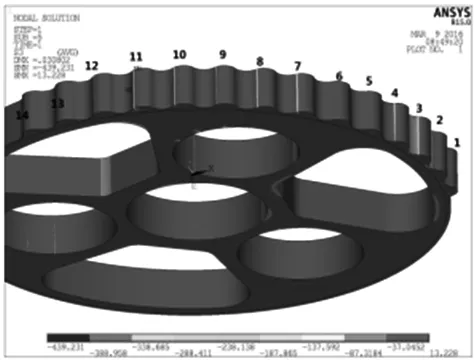
圖14 擺線輪接觸應力分布圖
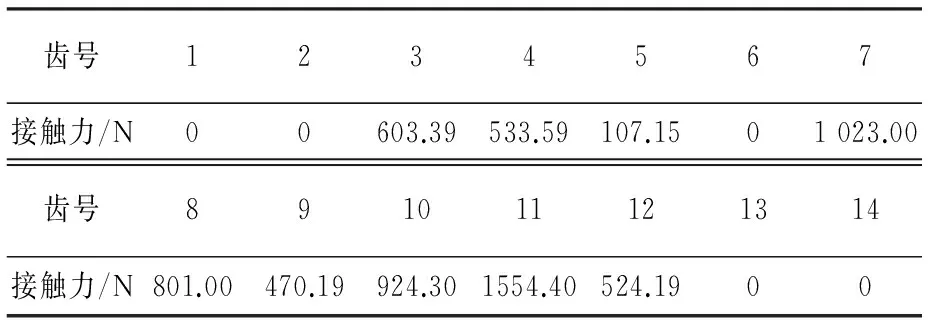
齒號1234567接觸力/N00603.39533.59107.1501023.00齒號891011121314接觸力/N801.00470.19924.301554.40524.1900
提取2、5、6號齒在1 s內所受嚙合力隨時間變化曲線,如圖15。
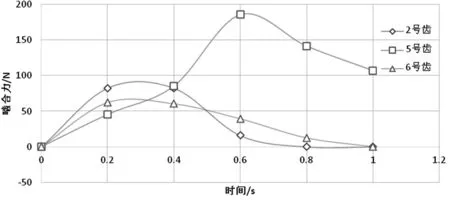
圖15 2、5、6號齒嚙合力時變曲線圖
2、5、6號齒嚙合位置所處的齒廓段采用負等距修形,補償了由于針齒和針齒銷孔加工誤差及曲柄軸承間隙引起的針齒與擺線輪齒之間的間隙。開始時嚙合力為零,在0.3 s前,2號齒所處的擺線輪輪緣未產生變形,隨著加載時間的增加,嚙合力隨著齒面變形量的增大而增大;當加載到0.3 s時,齒面變形量達到最大值,同時擺線輪輪緣開始變形,此時2號齒與針齒之間的間隙隨著輪緣的變形而逐漸增大,2號齒的嚙合力隨之減小;當加載到0.8 s時,輪緣的變形使得2號齒與針齒脫離接觸,2號齒嚙合力為零。6號齒受力規律與2號齒基本相同,但5號齒由于所處的輪緣剛度大于2號齒,在加載0.6 s時,5號齒所處的輪緣開始產生變形,使得5號齒與針齒間的間隙增大,齒面變形量減小,嚙合力減小。由于2、5、6號齒的嚙合位置位于靠近齒根處,接觸壓力角大,嚙合力較小。
提取10、11、12號齒在1 s內所受嚙合力隨時間變化曲線,如圖16。
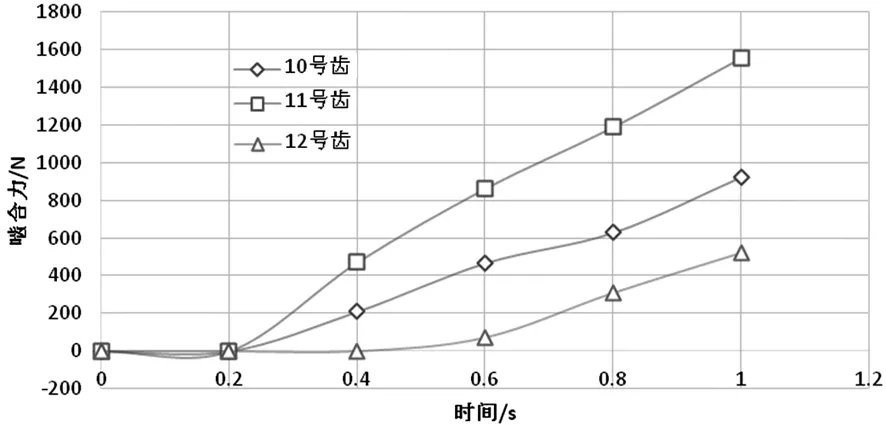
圖16 10、11、12號齒嚙合力時變曲線圖
由于針齒及針齒銷孔加工誤差及曲柄軸承間隙的影響,10、11、12號齒在開始時與針齒間存在間隙,當加載到0.2 s時,10、11、12號齒與針齒接觸,隨著加載時間的增加,齒面變形量增大,嚙合力增大。這三個齒的嚙合力變化規律基本相同。
為了方便說明,定義擺線輪梯形孔上方區域為柔性區,因為該區域比較薄弱,轉臂軸承孔兩側由于有類似加強筋的結構,所以剛性大,將此區域定義為剛性區,如圖17。
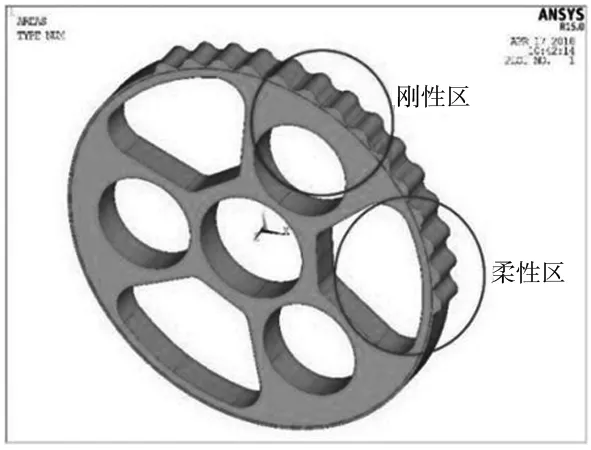
圖17 剛性區和柔性區的定義
將擺線輪變形放大300倍,如圖18。
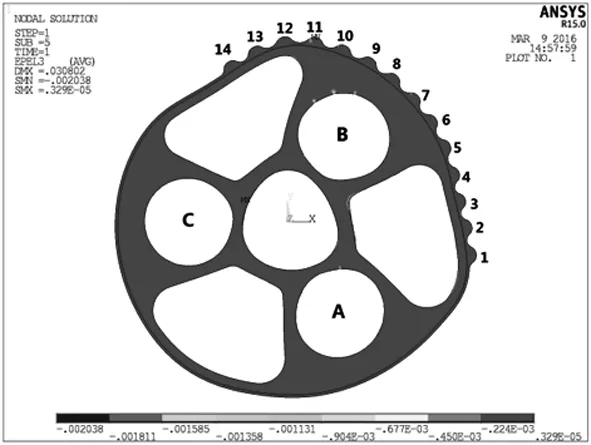
圖18 擺線輪變形放大300倍圖
由圖中可以看出:1、2、3、4號齒分布在柔性區,在針輪及A、B、C三處曲柄軸的共同作用下,該柔性區相對于剛性B區沿順時針方向被拉伸,產生凹陷變形,柔性區1、2、3、4號齒及鄰近的5、6號齒與針齒間嚙合間隙增大,嚙合力減小;12、13、14號齒所在的柔性區相對于剛性B區沿順時針方向被壓縮,也產生凹陷變形;7、8、9、10、11號齒所在的剛性B區相對于12、13、14號齒所在的柔性區沿逆時針方向被壓縮,整個剛性區產生外凸變形,其中11號齒作為柔性區和剛性區的過渡齒,外凸變形最大,受力最大,與11號齒相鄰的10號齒和12號齒隨著外凸變形的增大,嚙合力逐漸增大。這樣剛性區的齒承受主要載荷,柔性區的齒受力較小或不受力,從而降低擺線輪柔性區的疲勞破壞。
3 結 論
(1)本文建立了考慮針齒及針齒孔加工誤差和曲柄軸承間隙的RV減速器有限元裝配模型,利用該模型可以高效、準確地分析擺線輪的受力情況。
(2)歸納總結出擺線輪變形對擺線輪齒受力的影響規律,受力最大的齒是相互壓縮的剛性區和柔性區的過渡齒,剛性區分布的齒承受主要載荷,柔性區分布的齒受力較小或不受力,以降低擺線輪柔性區的疲勞破壞。
[1] 李力行.擺線針輪行星傳動的齒形修正與受力分析[J].機械工程學報,1986(1):18-23.
[2] 孫宇.擺線針輪行星減速器的有限元分析研究[D].陜西:西北農林科技大學,2008.
[3] 張東生.FA傳動齒形優化和齒面接觸狀態有限元分析[D].大連:大連鐵道學院,2004.
[4] 吳素珍,何衛東.RV針擺傳動齒面接觸強度非線性分析[J].鄭州大學學報,2015,36(4):100-104.
[5] 戴文婷.擺線針輪減速器實體建模和嚙合特性分析[D]. 天津:天津大學,2013.
[6] SHUTING L. Design and strength analysis methods of the trochoidal gear reducers[J]. Mechanism and Machine Theory, 2014, 81:140-154.
[7] BLAGOJEVIC′ M , MARJANOVIC′ N , DJORDJEVIC′ Z , et al. Stress and strain state of cycloid discs[C]. 1st International Scientific Conference on Mechanical Engineering Technologies and Applications, Jahorina, 2012: 367-374.
[8] THUBE S V,BOBAK T R. Dynamic analysis of a cycloidal gearbox using finite element method[J]. AGMA Technical Paper, Sumitomo Drive Technologies, 2012.
[9] 何衛東,吳鑫輝,盧琦.RV傳動中擺線輪及曲柄軸承有限元分析[J].大連交通大學學報,2016(4):67-71.
(責任編輯 趙環宇)
Force Analysis of Cycloidal Gear based on the Finite Element Assembly Model of the RV Reducer
WU Xin-hui1, LIU Ke-ying2, FENG Chang-jian1, LI Wen-long1
(1.School of Electromechanical Engineering, Dalian Minzu University, Dalian Liaoning 116605, China;2.School of Mechanical Engineering and Automation, Dalian Polytechnic University, Dalian Liaoning 116034, China)
Taking the RV reducer which is widely used in industrial robots as the research object, considering the deformation of the sun gear and planetary gears in the first stage, the deformation of the needle shell, needle, cycloidal gears, crank bearing rollers and crankshaft in the second stage, machining errors of the needle and needle hole, crank bearing clearance and meshing backlash between cycloidal gear and pin gear, ANSYS APDL was used to establish the parametric finite element assembly model of the RV reducer based on the finite element method. Through the finite element simulation analysis, the force distribution of the cycloidal gear teeth and the force of each tooth are obtained under the combined effects of each factor, and the influence of the deformation of the cycloidal spoke on the force of the cycloidal gear is summarized, which provides the basis for the optimization of the structural parameters of the cycloidal gear in the RV reducer.
RV reducer; finite element assembly model; influence on the force of the cycloidal gear; cycloidal gear; force analysis
2017-03-13;最后
2017-03-26
國家自然科學基金項目(51375064)。
吳鑫輝(1987-),男,山西運城人,講師,博士研究生,主要從事現代機械傳動研究。
2096-1383(2017)03-0222-05
TH132.41
A
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
