氣動伺服系統全局穩定快速收斂負載獨立壓力觀測器
2017-06-05 15:00:30錢鵬飛任旭東張連仁陶國良
農業機械學報 2017年4期
錢鵬飛 任旭東 張連仁 陶國良
(1.江蘇大學機械工程學院, 鎮江 212013; 2.無錫氣動技術研究所有限公司, 無錫 214072;3.浙江大學流體動力與機電系統國家重點實驗室, 杭州 310027)
氣動伺服系統全局穩定快速收斂負載獨立壓力觀測器
錢鵬飛1任旭東1張連仁2陶國良3
(1.江蘇大學機械工程學院, 鎮江 212013; 2.無錫氣動技術研究所有限公司, 無錫 214072;3.浙江大學流體動力與機電系統國家重點實驗室, 杭州 310027)
在氣動伺服系統中實現高精度控制,通常需要采用要求全狀態信息的基于模型的非線性控制算法。鑒于輕量化的設計要求或者出于成本的考慮,構建壓力觀測器來代替壓力傳感器。首先,采用李雅普諾夫穩定性理論來論證所設計的壓力觀測器的全局穩定性。其次,通過試驗研究,選取滿足試驗要求的多變指數值。然后,任意設定偏離實際值的壓力觀測器初值,以證實該壓力觀測器收斂迅速且不斷逼近真實值。另外,通過作用一個變剛度的載荷于系統,以證明該壓力觀測器是負載獨立的。最后,試驗表明采用所設計的壓力觀測器來實現氣動系統的伺服控制是有效的、可行的。
壓力觀測器; 氣動伺服系統; 快速收斂; 負載獨立; 全局穩定
引言
氣動伺服系統具有結構簡單、電磁兼容性好、功率-質量比大、可實行柔順控制等優點,在工業和機器人領域應用前景十分廣泛。然而,氣壓驅動系統由于氣體本身固有的可壓縮性、低阻尼特性以及氣動系統的參數時變性、模型不確定性和強非線性問題,導致氣動系統可控性差、控制精度低。近年來隨著研究的不斷深入,高精度的氣動伺服控制技術需要采用要求全狀態信息的基于模型的非線性控制算法[1-7],氣缸腔內實時的壓力信息是必需的。目前,諸多系統都要求輕量化的設計,例如移動機器人系統,同時為了節約成本,采用非線性壓力觀測器代替壓力傳感器來獲取壓力信息,以實現系統高精度氣動伺服控制。
目前,國內外針對觀測器理論已有很多應用研究,其中壓力觀測器也有一些研究[8-15],但這些研究中有的將腔內熱力學過程進行了簡化假設,有的則沒有完全拋開壓力傳感器。為了獲得高成本效益及減輕系統的質量,本文在之前的電控機械式自動變速箱氣動伺服控制研究[16-17]基礎上,設計全局穩定快速收斂負載獨立的壓力觀測器,完全拋開壓力傳感器,同時獨立地觀測兩腔的氣壓,以期實現閥控缸氣動系統的高精度伺服控制。
1 試驗系統和方法
采用圖1所示的離合器氣動執行裝置為試驗平臺,以其閥控缸氣動執行系統為研究對象,4個電磁閥兩兩一組分別獨立控制氣缸每個腔體的進氣和排氣,2個壓力傳感器僅用于觀察氣缸兩腔體內壓力的變化,此壓力信息不參與回路控制。
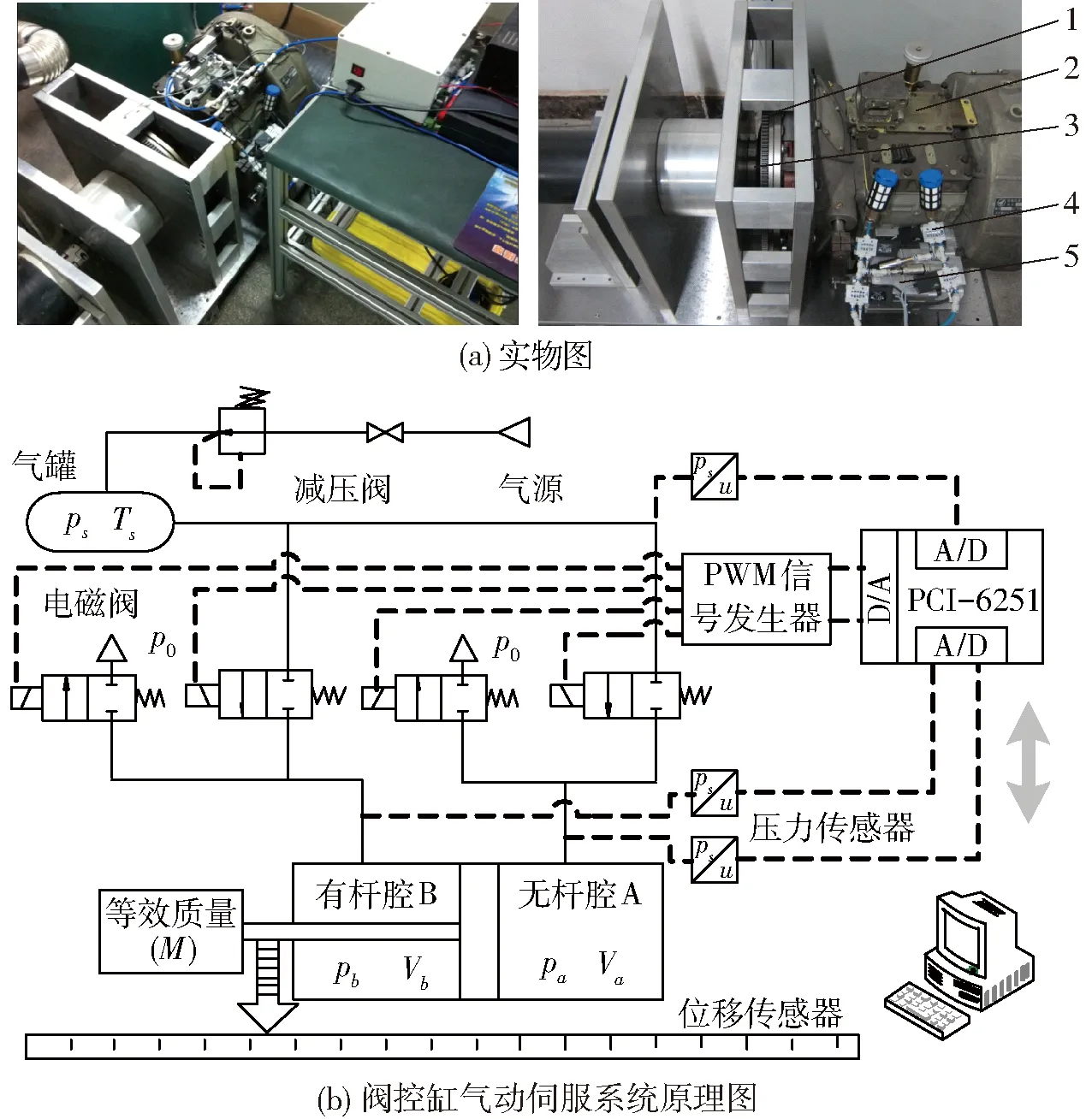
圖1 試驗裝置Fig.1 Experimental set-up1.離合器總成 2.變速箱 3.飛輪 4.電磁閥 5.離合器執行氣缸
首先,根據理想氣體狀態方程和壓縮氣體的熱力學特性推導了壓力觀測器的數學模型;隨后,在理論上對其穩定性進行論證;最后,為獲得較高的軌跡跟蹤精度并驗證所設計壓力觀測器有效性,采用基于模型的滑模算法[17],試驗驗證其快速收斂性和負載獨立性。
2 壓力觀測器設計
在通常情況下,不是高壓狀態或低溫狀態的壓縮氣體都可以考慮被當作理想氣體[18]處理。理想氣體狀態方程是基于如下假說的:氣體分子是完全有彈性的,分子的大小與它們間的平均自由程相比可以忽略,且相互之間無力的作用[19]。由于試驗所使用的壓縮氣體是常溫下的且近似為6個大氣壓,故可以看作為理想氣體。理想氣體狀態方程可以精確地描述壓縮氣體的熱力學特性,表示為
p=ρRT
(1)
式中p——壓縮氣體絕對壓力ρ——氣體密度T——壓縮氣體的絕對溫度R——通用氣體常數
實際情況下,氣體發生的熱力學過程都可以表示為多變過程
(2)
式中c——常數n——多變指數(等溫過程情況下n=1.0,絕熱過程情況下n=1.4)
對式(2)兩邊進行微分,結合式(1)可推導出

(3)
壓縮氣體的質量流量可以表示為

(4)
式中m——壓縮氣體質量
V——壓縮氣體體積
將式(4)代入式(3)可得
(5)
式(5)中,等號右邊第1項可表示為由充、放氣所引起的氣缸腔內的壓力變化,等號右邊第2項可表示為由活塞運動而引起的氣缸腔內體積變化所造成的腔內壓力變化。故式(5)可表示為
(6)
式中n0——由充、放氣過程所引起腔內熱力學變化的多變指數
n1——由活塞運動所引起腔內熱力學變化的多變指數

(7)
氣缸腔內閉環壓力觀測器可以表示為
(8)

其中,i=a,b,分別指氣缸的無桿腔和有桿腔。
選擇一個正定候選李雅普諾夫函數
(9)
其中

對式(9)進行微分,結果為
(10)
將式(7)和式(8)代入式(10)中,可得
(11)








圖2 歸一化的質量流量Fig.2 Normalized mass flow rate
綜上所述,當閥控缸系統運行時,一腔充氣并且另一腔排氣,亦或兩腔都關閉。兩腔同時考慮則會產生一個負半定的等式(11),經證明兩腔的壓力觀測器對于估計得到的壓力誤差來說是全局李雅普諾夫穩定的。另外,若兩腔分開考慮,氣缸的各氣腔都可以被證明至少是負半定的并且獨立于另一腔。采用上述同樣的方法分別對兩腔定義李雅普諾夫函數,則各腔體也能被證明是李雅普諾夫穩定的。
3 壓力觀測器試驗
為驗證所設計的壓力觀測器的性能,以圖1所示的電磁閥控缸氣動系統為試驗裝置,進行相關的可行性驗證。采用基于模型的滑模控制算法,以250 Hz的控制頻率執行氣缸的位置伺服控制。試驗中只有通過壓力觀測器觀測到氣壓力才可以進入控制器運算,壓力傳感器測得的壓力信息只用于離線對比。
3.1 無負載力試驗
閥控缸系統的活塞桿上無任何外界負載力作用,只承受氣體壓力和氣缸的摩擦力,系統跟蹤正弦參考軌跡x=17.5sin(πt),表1所示為試驗系統的主要物理參數。
由于氣缸腔內充、放氣的過程屬于多變過程,其多變指數的具體數值無法確定,但是必定介于1.0~1.4之間。故首先假設,氣缸腔體內氣體的充、放氣過程都是等溫過程,即n0=1.0。系統跟蹤參考軌跡的試驗結果如圖3所示,可知當活塞運動至氣缸兩端時,相比于實際測量氣壓,觀測壓力出現了較大的峰值。經過分析,峰值現象可能是由于壓力觀測器選用了不準確的多變指數,使得當活塞處于端部位置時小容腔體積放大了觀測誤差所致。經過多次調整多變指數值進行的試驗,發現壓力觀測器中多變指數值設置在1.1附近時,觀測壓力的尖峰現象消失。圖4所示即為n0=1.1時系統跟蹤相同的參考軌跡時氣缸腔內壓力的情況。
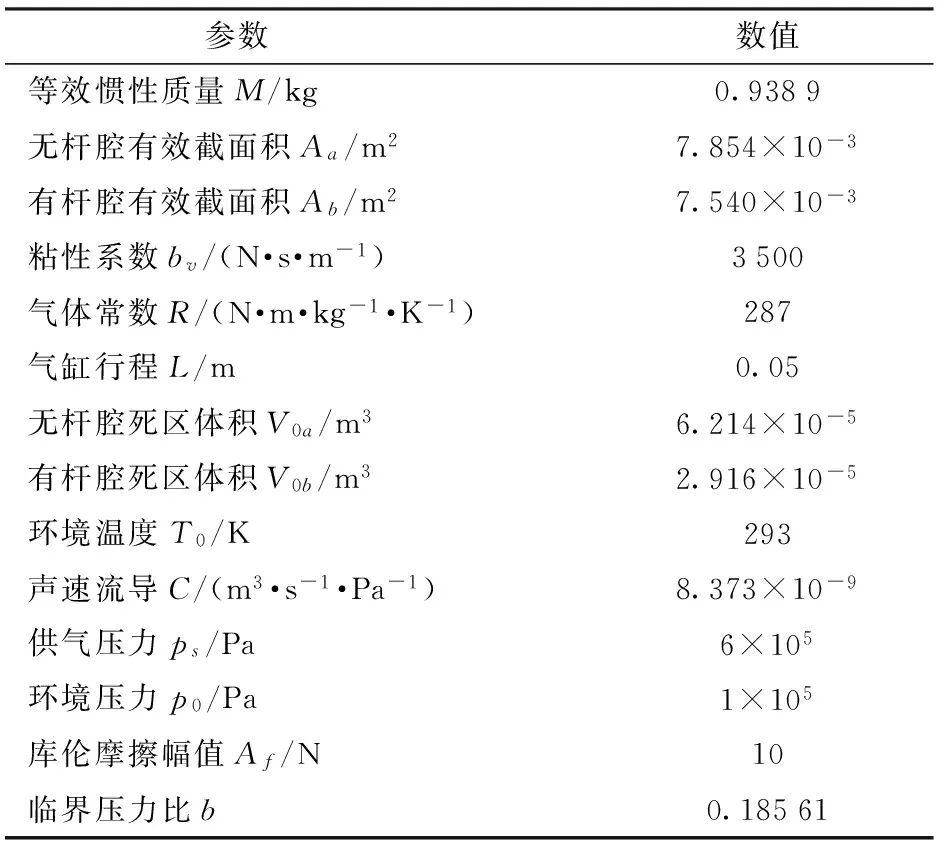
表1 試驗系統主要物理參數

圖3 壓力觀測器中n0=1.0時試驗結果Fig.3 Experiment results for proposed pressure observer (n0=1.0)

圖4 壓力觀測器中n0=1.1時兩腔的壓力情況Fig.4 Observed and measured pressures of both chambers for proposed pressure observer (n0=1.1)
為驗證所設計的壓力觀測器的快速收斂性,設定壓力觀測器的初始值遠遠偏離腔內氣壓的真實值,同時在先前試驗結束后氣缸腔不對外排氣使腔內處于保壓狀態。圖5所示為壓力觀測器初始值設為1個大氣壓時系統跟蹤相同參考軌跡的試驗結果,可見壓力觀測值快速向實際壓力收斂,初始時由于觀測壓力大幅偏離實際值,故瞬態跟蹤誤差較大為1.5 mm,最終的最大絕對軌跡跟蹤誤差為0.39 mm。圖6所示為采用壓力傳感器在同樣的試驗條件下系統跟蹤一樣的參考軌跡時所得到的軌跡跟蹤情況,其初始瞬時跟蹤誤差為1.2 mm,最終最大的穩態跟蹤誤差為0.38 mm。對比圖5和圖6軌跡跟蹤情況可知,采用壓力觀測器所獲得的軌跡跟蹤精度與使用壓力傳感器的結果基本一致。

圖5 壓力觀測器(n0=1.1)初始值為1個大氣壓時試驗結果Fig.5 Experiment results when initial conditions of proposed pressure observer (n0=1.1) were set as one bar pressure
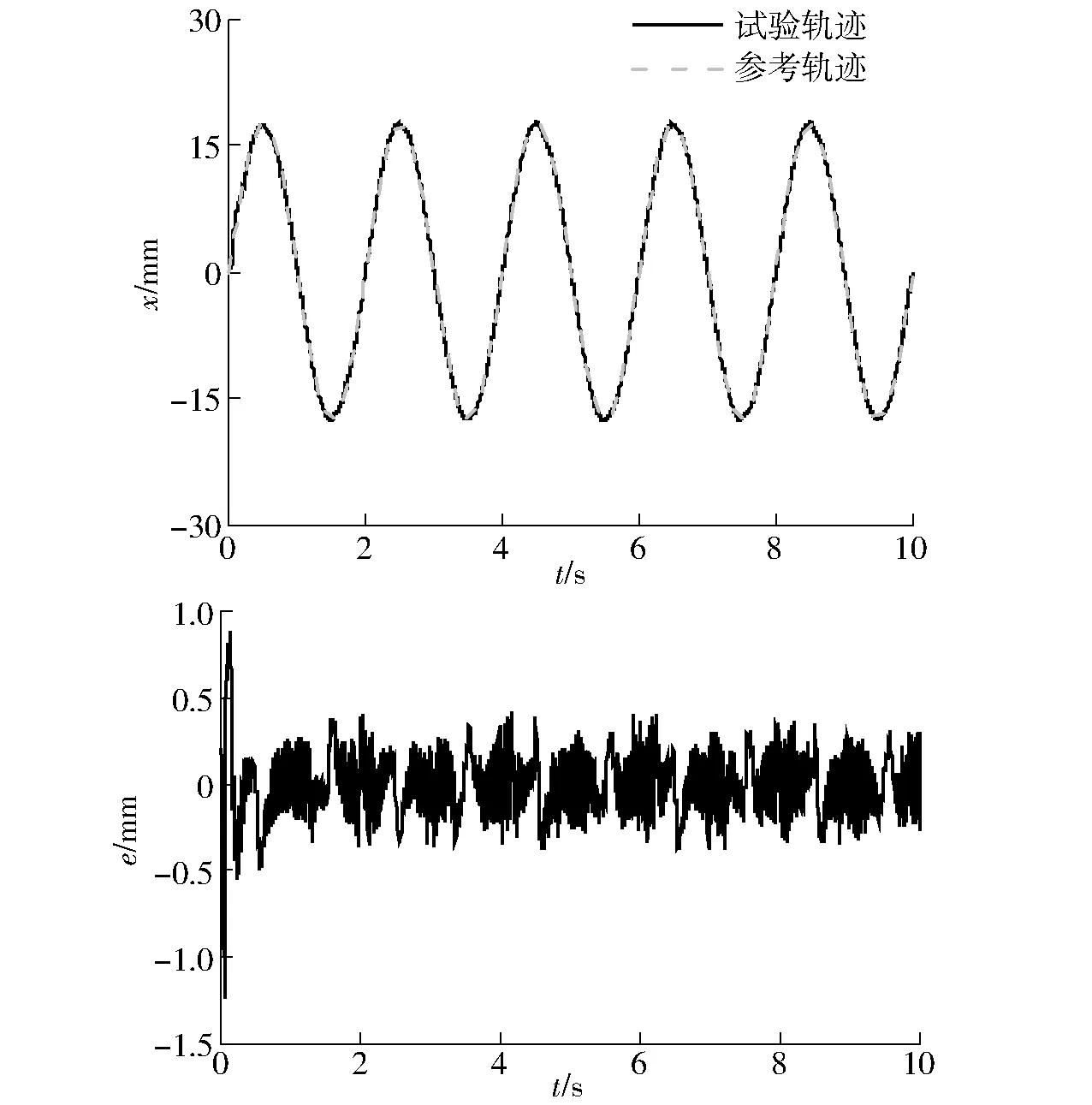
圖6 使用壓力傳感器軌跡跟蹤試驗情況Fig.6 Experiment results of trajectory tracking with pressure sensors
3.2 加負載力試驗

圖7 高度非線性變剛度的外界負載力Fig.7 Highly nonlinear external loading force with variable stiffness
閥控缸氣動系統的活塞桿上作用高度非線性且存在負剛度階段的外界變負載力(離合器負載特性),如圖7所示。原先設置的零點向右移動17.5 mm,同樣采用原先的閥控缸系統使用所設計的壓力觀測器(n0=1.1)進行參考軌跡x=17.5sin(πt)+17.5的跟蹤試驗。試驗結果如圖8所示,壓力觀測器(n0=1.1)在軌跡跟蹤試驗中能快速收斂且能比較準確地估計出氣缸腔內的實際壓力情況,其最大絕對軌跡跟蹤誤差為0.46 mm,表現出良好的軌跡跟蹤性能,表明所設計的壓力觀測器不受外加負載力的影響,故是負載獨立的。圖9所示為使用壓力傳感器的加載負載力系統進行同一參考軌跡的跟蹤試驗情況,其最大絕對軌跡跟蹤誤差為0.48 mm。圖8和圖9再次表明所設計的壓力觀測器可以獲得和壓力傳感器近乎一致的軌跡跟蹤精度。

圖8 壓力觀測器(n0=1.1)負載獨立性試驗Fig.8 Load-independent experiment verification results for proposed pressure observer (n0=1.1)
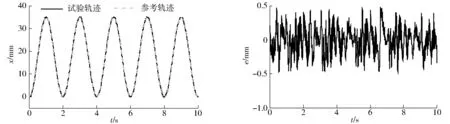
圖9 使用壓力傳感器的加載負載力系統軌跡跟蹤試驗Fig.9 Experiment results with pressure sensors for loaded system
4 結束語
針對閥控缸氣動伺服系統設計了氣缸腔內的壓力觀測器,并在理論上證明了其是全局李雅普諾夫穩定的。通過試驗方式選定了能夠較為準確地表征由于充、放氣而造成的氣缸腔內熱力學變化的多變指數,n0=1.1。采用加載負載力的方式驗證了所設計的壓力觀測器是快速收斂且負載獨立的;在任意設定壓力觀測器的初始條件下,通過試驗表明所設計的壓力觀測器是快速收斂的。綜合上述軌跡跟蹤試驗結果表明,采用所設計的壓力觀測器代替壓力傳感器來實現氣動系統的輕量化設計及高精度伺服控制是可行的。
1 MENG D Y, TAO G L, ZHU X C. Integrated direct/indirect adaptive robust motion trajectory tracking control of pneumatic cylinders[J]. International Journal of Control, 2013, 86(9): 1620-1633.
2 QIAN P F, TAO G L, MENG D Y, et al. A modified direct adaptive robust motion trajectory tracking controller of a pneumatic system[J]. Journal of Zhejiang University—Science C (Computer & Electronics), 2014, 15(10): 878-891.
3 ZHU X C, TAO G L, YAO B, et al. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles[J]. Automatica, 2008, 44(9): 2248-2257.
4 SHANG C, TAO G L, MENG D Y. Adaptive robust trajectory tracking control of a parallel manipulator driven by pneumatic cylinders[J]. Advances in Mechanical Engineering, 2016, 8(4): 1-15.
5 MENG D Y, TAO G L, LI A M, et al. Motion synchronization of dual-cylinder pneumatic servo systems with integration of adaptive robust control and cross-coupling approach[J]. Journal of Zhejiang University—Science C (Computer & Electronics), 2014, 15(8): 651-663.
6 QIAN P F, REN X D, TAO G L, et al. Compound sliding mode motion trajectory tracking control of an electro-pneumatic clutch actuator while maximizing its stiffness[J]. Journal of the Chinese Society of Mechanical Engineers, 2016, 37(6): 515-524.
7 孟德遠, 陶國良, 朱笑叢, 等. 氣動位置伺服系統運動軌跡跟蹤控制[J/OL]. 農業機械學報, 2013, 44(4):268-274, 279. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130446&flag=1. DOI:10.6041/j.issn.1000-1298.2013.04.046. MENG D Y, TAO G L, ZHU X C, et al. Motion trajectory tracking control of pneumatic position servo systems[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 268-274, 279.(in Chinese)
8 BIGRAS P, KHAYATI K. Nonlinear observer for pneumatic system with non-negligible connection port restriction [C]∥Proceedings of the 2002 American Control Conference, IEEE, 2002, 4: 3191-3195.
9 PANDIAN S R, TAKEMURA F, HAYAKAWA Y, et al. Pressure observer-controller design for pneumatic cylinder actuators[J]. IEEE/ASME Transaction on Mechatronics, 2002, 7(4): 490-499.
10 WU J, GOLDFARB M, BARTH E. On the observability of pressure in a pneumatic servo actuator[J]. ASME Journal of Dynamic Systems, Measurement, and Control, 2005, 125(4): 921-924.
11 GULATI N, BARTH E J. A globally stable, load-independent pressure observer for the servo control of pneumatic actuators[J]. IEEE/ASME Transactions on Mechatronics, 2009, 14(3): 295-306.
12 SZABO T, BUCHHOLZ M, DIETMAYER K. A feedback linearization based observer for an electropneumatic clutch actuated by on/off solenoid valves [C]∥2010 IEEE International Conference on Control Applications (CCA), 2010: 1445-1450.
13 LANGJORD H, KAASA G O, JOHANSEN T A. Nonlinear observer and parameter estimation for electropneumatic clutch actuator [C]∥Proceedings of IFAC Symposium on Nonlinear Control Systems, IFAC Proceedings Volumes,2010, 43(14):789-794.
14 LANGJORD H, KAASA G, JOHANSEN T A. Adaptive nonlinear observer for electropneumatic clutch actuator with position sensor[J]. IEEE Transactions on Control System Technology, 2012, 20(4): 1033-1040.
15 ASCHEMANN H, SCHINDELE D, PRABEL R. Observer-based control of an electro-pneumatic clutch using extended linearization techniques [C]∥2012 17th International Conference on Methods and Models in Automation and Robotics (MMAR), 2012: 493-498.
16 錢鵬飛, 陶國良, 孟德遠, 等. 電控氣動離合器執行器滑模軌跡跟蹤控制[J]. 浙江大學學報:工學版, 2014, 48(6):1102-1106, 1113. QIAN P F, TAO G L, MENG D Y, et al. Sliding mode trajectory tracking control of electro-pneumatic clutch actuator[J]. Journal of Zhejiang University: Engineering Science, 2014, 48(6): 1102-1106, 1113. (in Chinese)
17 錢鵬飛, 陶國良, 孟德遠, 等. 基于非線性模型的電氣離合器執行系統位置伺服控制[J/OL]. 農業機械學報, 2014, 45(3):1-6. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140301&flag=1. DOI:10.6041/j.issn.1000-1298.2014.03.001. QIAN P F, TAO G L, MENG D Y, et al. Nonlinear model-based position servo control of electro-pneumatic clutch actuator[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(3): 1-6.(in Chinese)
18 王積偉, 章宏甲, 黃誼. 液壓與氣壓傳動[M]. 2版. 北京:機械工業出版社, 2005: 34-35.
19 BEATER P. Pneumatic drives-system design, modelling and control [M]. New York: Springer-Verlag Berlin Heidelberg, 2007.
20 QIAN P F, TAO G L, LIU H, et al. Globally stable pressure-observer-based servo control of an electropneumatic clutch actuator[J]. Proc. IMech E, Part D: Journal of Automobile Engineering, 2015, 229(11): 1483-1493.
Globally Stable, Fast Convergent and Load-independent Pressure Observer for Pneumatic Servo Systems
QIAN Pengfei1REN Xudong1ZHANG Lianren2TAO Guoliang3
(1.SchoolofMechanicalEngineering,JiangsuUniversity,Zhenjiang212013,China2.WuxiPneumaticTechnicalResearchInstituteCo.,Ltd.,Wuxi214072,China3.StateKeyLaboratoryofFluidPowerTransmissionandControl,ZhejiangUniversity,Hangzhou310027,China)
High-accuracy servo control of pneumatic systems requires nonlinear model-based control techniques based on full-state knowledge of the system. For the consideration of cost or light-weight design, non-linear pressure observers in place of pressure sensors were constructed to acquire the pressure states in the chambers of the pneumatic cylinder. Firstly, the global stability of the proposed pressure observer was demonstrated based on Lyapunov-stability theory. Secondly, the pressure observer’s polytropic exponent was analyzed and determined experimentally. Moreover, to check the fast convergence of the proposed pressure observer, a set of experiments for tracking a 0.5 Hz sinusoidal trajectory were performed under condition that the initial states of both chambers should be pressurized and the initial values of the observed pressures were intentionally set different from the actual values. Furthermore, to verify the load-independent of the presented pressure observer, the valve-controlled pneumatic cylinder system acted upon by a variable-stiffness loading force was adopted to carry out pneumatic servo control. A three-way on-off solenoid value was configured as two-way valve. Thus, four two-way on-off solenoid valves controlled with pulse width modulation (PWM) in lieu of one or two proportional valves were employed to govern the pneumatic cylinder for achieving the pneumatic servo control. Finally, extensive experiments validated the effectiveness and feasibility of the proposed pressure observer for high-accuracy pneumatic servo control of the valve-controlled pneumatic cylinder system.
pressure observer; pneumatic servo system; fast convergence; load-independent; global stability
10.6041/j.issn.1000-1298.2017.04.053
2016-07-22
2016-10-22
國家自然科學基金項目(51605194)、中國博士后基金項目(2016M591921)、江蘇省自然科學基金項目(BK20160531)和江蘇大學高級人才科研啟動基金項目(15JDG152)
錢鵬飛(1987—),男,講師,博士,主要從事氣動伺服控制和非線性控制理論與應用研究,E-mail: pengfeiqian@ujs.edu.cn
TH138.51; TM921.54+1
A
1000-1298(2017)04-0399-07
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
