車道偏離預警系統專利技術綜述
2017-06-03 15:52:18王翠亭王聰
科學與財富 2017年15期
關鍵詞:綜述
王翠亭+王聰


(國家知識產權局專利局專利審查協作湖北中心 湖北省 武漢市 430070)
摘 要: 車道偏離預警系統是安全輔助駕駛系統的重要組成部分,系統的研究對提高交通安全,降低人員和經濟損失具有重大意義,文章結合現有技術和專利,從國內外專利申請量、重要申請人分析等方面分析了車道偏離預警系統的研究現狀,并對車道偏離預警系統的重要技術分支的演變進行了梳理,該研究對國內車道偏離預警系統的發展方向有一定指導作用。
關鍵詞: 車道;偏離;綜述;預警
1車道偏離預警系統技術概述
車道偏離預警系統是安全輔助駕駛技術中必不可少的系統,是智能交通系統的重要組成部分。它的功能是輔助駕駛員在正確車道中行駛,當駕駛員因疲勞、疏忽和注意力不集中等原因導致車輛跨越車道邊界行駛時,系統會及時向駕駛員發生警告信號,避免車道偏離事件的發生[1]。目前,世界上很多國家已經就如何防止防止車道偏離研制出一些各具特色的車道偏離警告系統,如LDW系統、AWS系統、AutoVue系統等[2],車道偏離系統能夠有效防止駕駛員疏忽造成的車道偏離事故發生,因此車道偏離預警系統的研究對提高道路交通安全有重大意義。 2車道偏離預警系統國內外發展概況
如圖1所示,是國外歷年來車道偏離預警系統專利申請量,其可以分成三個階段。第一階段是車道偏離預警系統的起步階段是在(2000年以前),車道偏離預警系統處于研究的階段,第二階段是穩步發展階段(2000年-2004年),專利申請保持者穩步的增長,從2000年的19件增長到2004年的88件,增長速度比較穩定。然而從2004年到2014年,出現了急速增長的趨勢,到了2014年已經到了438件,可以看出最近幾年是該申請方向研究比較熱門的時間。
相對于國外的發展,從圖1中可以看,國內發展情況起步比較晚,當2004年全球進入迅速發展時期時,在中國才有相關的專利申請,通過閱讀發現2004年的10件專利申請均是國外公司的申請,其中9件來自于日產自動車株式會社,可見,在國外市場的帶動下,中國關于車道偏離預警方向的專利申請才開始有了初始的發展,直到2008年開始了比較迅速的發展并一直到現在,這與全球重要技術原創國對中國市場的重視以及中國申請人對該方向研發的重視有很大的關系。
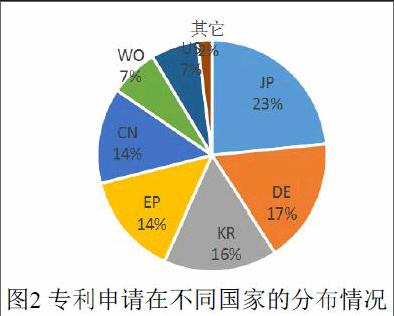
如圖2所示,是車道偏離預警系統在日本、德國、韓國、美國以及中國的總體分布情況。從圖中可以看出,歐洲、韓國、日本、美國是專利申請的主要目標地區,這說明上述全球車道偏離預警系統的申請人對上述地區的專利市場比較重視。
3 車道偏離預警系統重要申請人研究
3.1日產專利技術分析
日產作為車道偏離預警系統國內及全球范圍內的重要申請人,在該領域具有舉足輕重的地位。該國的申請文獻在車道偏離預警的方向上主要是在控制方法方面的改進,根據控制目的,則該國又偏重于協調車道偏離預警與駕駛員感覺之間的關系的研究,如“防止偏離行車線裝置”(申請號:CN200510132065)提供了一種防止偏離行車線裝置,其車道偏離預警與行車線橫擺角無關,避免使駕駛者早期產生動作感而產生的不適感;而“車道偏離防止裝置及方法”(申請號:CN200710097301)則是通過對車道偏離預警系統控制感時間的控制來防止駕駛員的不適感;對于精確控制方面的研究,也有相關文獻,如“車輛動力學控制設備”(申請號:CN200410004874)是通過平衡車輛穩定性控制與車道偏離控制之間的關系來實現精確控制,根據研究發現,日本大多數的申請是關于車道偏離預警方向中控制策略方面的。
3.2通用環球專利技術分析
通用汽車環球科技運作公司作為在中國市場的重要申請人,在該領域具有重要地位。通過研究相關文獻發現,該申請人在車道偏離預警研究的行為環境感知和車道偏離預警控制方法兩個方面都有相關研究,行車環境感知技術主要分為視覺系統的改進和數據融合兩個方面,視覺系統改進主要是從傳感器的布置,如“使用前視和后視攝像機的車道融合系統”(申請號:CN201110258002)以及“具有前攝像機和后攝像機的穩健的車輛側向控制”(申請號:CN201110257988)中通過直接使用前和后攝像機圖像作為輸入,與道路曲率的指示器一起來通過多向輸入源來進行更可靠和穩定的控制;而“提供環繞車輛的圖像的多個照相機”(申請號:CN201310158018 )則提供環繞車輛的多個照相機來確保數據的精度,而“車道追蹤系統”(申請號:CN201210509802)則是通過改變攝像頭的配置,將攝像頭配置為從寬角度視野接收道路圖像,從而避免前方車輛太靠近時前方車輛會阻擋攝像頭對車道標記的觀察從而造成邊界車道線難以識別或不可識別的問題;除了對攝像頭方面的改進,通用汽車還側重傳感器融合技術的研發,如“通過用于車道居中/保持的對象車輛信息的車道感測增強”(申請號 :CN201210187902)中通過多個傳感器的組合,從而防止單一視覺系統的準確性不高的問題,而“在道路改變情境中使用導航輸入的錨車道選擇方法”(申請號:CN201210187902)中,則融合了數字地圖和前方車輛信息以及機器視覺,從而可以更精確的估計車道。
對于控制方法的研究,通用汽車主要是從事了駕駛員開啟和關閉車道偏離預警系統的方便性和駕駛員在操作時的舒適性研究,對于駕駛員使用方便性研究,如“可選擇的車道偏離警告系統及方法”(申請號CN200680035400)中可以基于操作者的喜好調整車道偏離警告系統,而“用于自動車道居中和車道變換控制系統的路徑生成算法”(申請號:CN200980123295)一種旨在使乘客獲得舒適感的自主或半自主車輛中的為車道居中和車道變換提供平穩操作的系統和方法。相對于日本而言,美國更加側重行為環境感知方面的研究。
4 技術路線
行為環境感知是車道偏離預警技術的基礎,目的是為系統提供必要的輸入參數,本章對車道偏離預警系統中的重要技術分支-行為環境感知技術做了進一步詳細的分析,主要從技術發展路線方面進行分析。
如圖3所示,其為行為環境感知技術的演變史,主要表現形式為時間軸,橫坐標表示申請日,文件號以申請號的形式表現。
從圖3中可知,最初的行為環境感知檢測模塊是基于道路基礎的,通過埋設標志物如磁鐵等來進行道路路線識別,然而這種方式對道路的改造成本高、周期長,自從機器視覺技術的發展,從1997年起,關于車道保持大量的研究采用的傳感器均是相機,并且采用的是前視相機,即通過將相機安裝在車輛的前方來探測前方路線特征,在近距離處的阻擋大部分攝像機視野的領先車輛、以及使攝像機圖像模糊的低能見度天氣情況,例如雨和霧。在這些情況下,當不能從前視攝像機獲取可用的圖像時,依賴于攝像機的圖像作為輸入的系統不能運行,于是有了添加后視相機以及側視相機等多種方式進行輔助的技術的發展,從而確保系統的精度以及可靠性。為了能夠檢測前方障礙物,防止碰撞,也有一部分研究將雷達技術融合進車道偏離預警中,而從2013年起車道偏離預警系統則側重與多傳感器技術融合的發展,將GPS導航技術、無線通信技術以及磁導航技術融合進來,現有的車道偏離預警正向著智能化、人性化的方向發展。
5結束語
本文針對國內和國外的專利申請量進行了分析,通過分析發現,我國在車道偏離預警領域已經有所發展,國內申請量也占有一定比例,然而,由于起步較晚,相較于國外申請還有所差距,且存在申請人分散、未形成清晰、完整的技術脈絡的問題,對于專利市場,國內目前還沒有足夠的重視,在后續的研究過程中,可以通過對國外重要申請人申請方向的研究來合理專利布局,減少和發達國家之間的差距。
參考文獻
[1]羅強,面向高速公路行車安全預警的車道偏離及換道模型研究[D].華南理工大學,2014.
[2]賈立山,體現駕駛員特性的車道偏離預警系統關鍵技術研究[D].華中科技大學,2011.
猜你喜歡
話語研究論叢(2022年0期)2022-11-02 09:29:02
文化創新比較研究(2020年8期)2021-01-22 00:38:10
裝備制造技術(2020年2期)2020-12-14 03:09:44
鐵道通信信號(2020年8期)2020-02-06 09:13:18
電子制作(2019年10期)2019-06-17 11:45:16
石油瀝青(2018年6期)2018-12-29 12:07:04
NBA特刊(2018年21期)2018-11-24 02:47:52
自動化學報(2017年11期)2017-04-04 02:52:28
功能高分子學報(2016年1期)2016-04-26 01:39:05
法醫學雜志(2015年2期)2015-04-17 09:58:45