計算機視覺技術(shù)在目標航拍定位中的應用
2017-06-01 12:19:01石紅巖王江濤
長春大學學報 2017年4期
石紅巖, 王江濤
(仰恩大學 a.數(shù)學系; b.工程技術(shù)學院,福建 泉州 362014)
計算機視覺技術(shù)在目標航拍定位中的應用
石紅巖a, 王江濤b
(仰恩大學 a.數(shù)學系; b.工程技術(shù)學院,福建 泉州 362014)
目標航拍定位通過航拍采集圖像信息,運用計算機視覺技術(shù)對采集的圖像信息進行處理,從而實現(xiàn)目標的定位。根據(jù)定位所需的信息,提出了數(shù)據(jù)的采集內(nèi)容以及實現(xiàn)目標定位的方法,同時,為目標航拍定位工程的實現(xiàn)提出了目標航拍定位的硬件方案。仿真驗證了提出的數(shù)據(jù)采集內(nèi)容、目標定位方法的有效性。海上救援部門,可以利用航拍設備,對所轄海域進行巡邏,一旦發(fā)現(xiàn)船只事故可以立刻掌握其位置信息,展開搜救行動。
計算機視覺技術(shù);航拍定位;硬件方案
0 引言
建設執(zhí)法部門稽查違章建筑、交警追巡逃逸車輛、海上救援行動等等,很多都需要對目標進行定位。常用的目標定位方法有派遣人員巡視、通過監(jiān)控系統(tǒng)進行大致觀測等手段。這些手段有效率低下、存在盲區(qū)、定位不準等缺點。目前,隨著計算機視覺技術(shù)的快速發(fā)展,通過圖像或者視頻數(shù)據(jù)對目標進行快速拍攝與快速定位處理成為可能[1]。空中拍攝(航拍)具有“站得高、看得遠”的優(yōu)點[2],而且飛行設備具有行動迅速、不容易遭受破壞干擾等優(yōu)點。如果將計算機視覺技術(shù)與航拍技術(shù)相結(jié)合用于目標的定位將具有重要的實際意義。例如建設執(zhí)法部門可以采用遙控航拍設備,利用計算機視覺定位技術(shù),快速尋找在建或者已存在的違章建筑,視野寬廣全覆蓋,巡邏效率高;交警可以在發(fā)現(xiàn)可疑車輛的時候迅速使用遙控航拍設備對可疑車輛進行跟蹤、定位,避免因為行動反應較慢、交通堵塞、路口監(jiān)控設備破壞而造成可疑車輛逃逸情況的發(fā)生,讓可疑車輛無處遁形。鑒于基于計算機視覺技術(shù)與航拍技術(shù)對于目標定位的重要現(xiàn)實意義,非常有必要研究一種采用計算機視覺技術(shù)的目標航拍定位方法。
1 計算機視覺定位原理
計算機視覺定位技術(shù)越來越受到國內(nèi)外專家學者的重視。從攝像設備的幾何模型建立視覺圖像與地球坐標系的幾何關系。首先,輸入想定位的目標信息,然后通過視覺系統(tǒng)對采集的圖像進行識別與匹配,計算出圖像中目標的位置,運用視覺圖像與地球坐標系的幾何關系,最后計算出目標在地球坐標系中的絕對位置。
輸入的目標信息主要是圖像特征參數(shù),包括顏色、形狀等[3]。特征點是圖像的重要局部特征之一,它確定了圖像中目標的顏色與形狀,對采集的圖像進行特征點提取是計算機視覺定位中非常重要的一項工作。
計算機視覺處理模塊需要把圖像中提取的特征點與輸入目標信息進行匹配才能進行目標的識別。圖像匹配也是計算機視覺定位中非常重要的工作之一。由于點特征相對于線特征以及其他特征更容易提取與使用,所以通常圖像匹配都采用點特征匹配的方法[4]。
圖像中目標絕對位置與目標在地球上絕對位置的幾何模型,不同的攝像設備存在差異,但是基本都有一個固定的幾何模型,通過該模型可以方便地根據(jù)目標在圖像中的位置計算出目標在實際空間相對于圖像坐標系原點的相對位置。只擁有該位置還不足以得到目標的絕對位置。GPS定位技術(shù)是目前使用最為廣泛的地球坐標絕對位置獲取方法之一[5],通過在攝像設備上加裝GPS可以簡單快速地得到攝像機的絕對位置。通過圖像坐標系、攝像機坐標系與地球坐標系之間的關系,可以方便地得出拍攝某圖片時,圖像坐標系原點的絕對位置。圖像坐標系的原點坐標與目標實際在圖像坐標系上的空間相對位置相加便可得到目標在地球坐標系上的絕對位置。
2 目標航拍定位硬件方案
為了實現(xiàn)目標的航拍定位,需要使用計算機視覺處理模塊、信息傳輸模塊、遙控模塊、GPS模塊、圖像采集模塊、飛行平臺等功能模塊。計算機視覺處理模塊的作用為:目標信息的輸入、圖像處理、GPS位置修正與導入、目標定位。常用硬件為單片機或者嵌入式系統(tǒng)[6-7]。信息傳輸模塊分為控制臺端信息傳輸模塊與飛行端信息傳輸模塊,其主要負責信息的發(fā)送與傳輸。遙控模塊分為控制臺遙控模塊與飛行端控制模塊。控制臺遙控模塊負責遙控指令發(fā)送;飛行端遙控模塊負責遙控指令的接收與執(zhí)行。GPS天線的作用是對圖像采集裝置位置進行定位,安裝的時候應安裝與艏艉連線上[8],最好在圖像采集裝置的正上方。圖像采集模塊負責圖像的采集,常用設備是攝像機與照相機,安裝在飛行平臺的艏艉連線上,最好安裝與GPS天線正下方。飛行平臺可以是無人機、無人飛艇等設備。
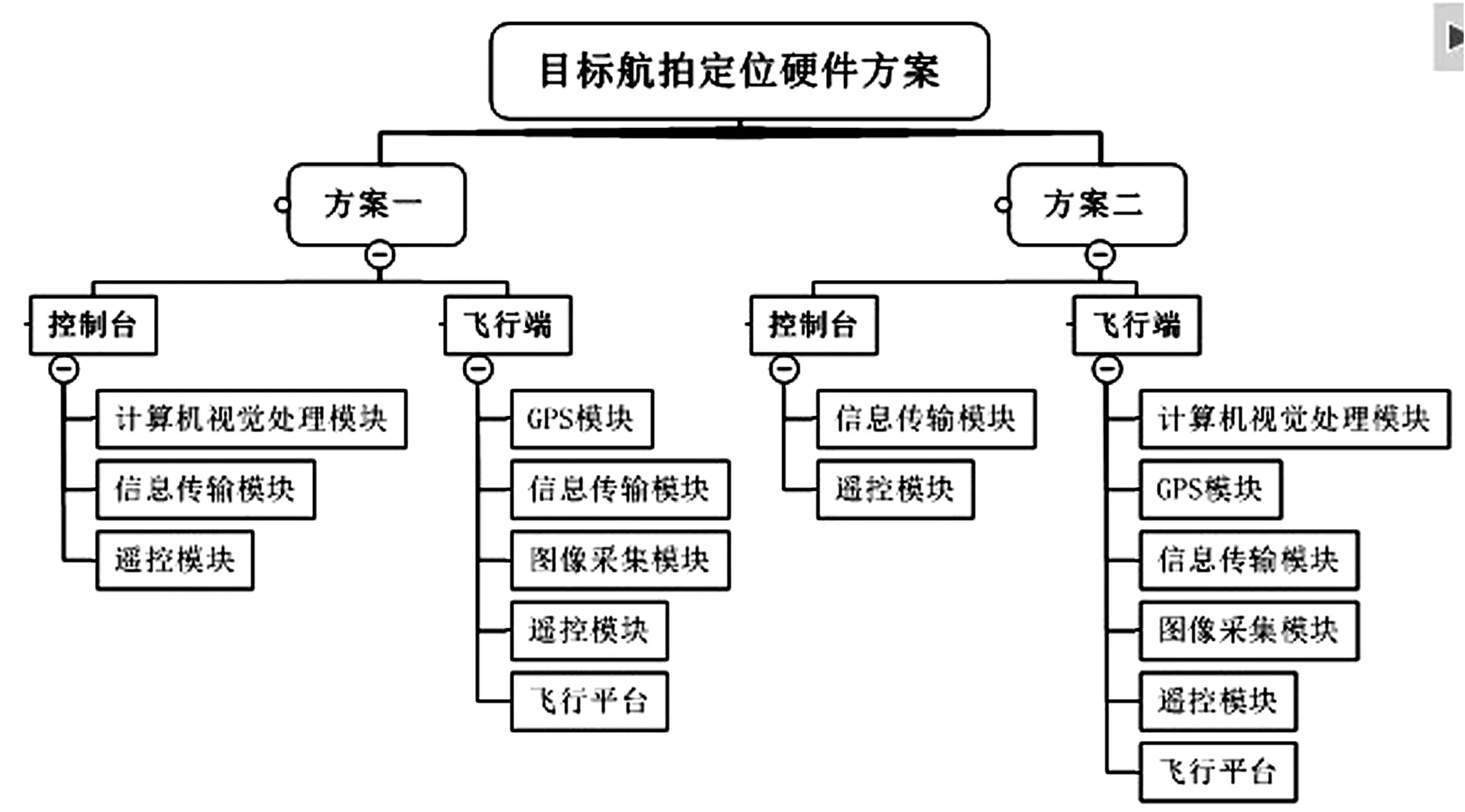
圖1 目標航拍定位硬件方案
目標航拍定位硬件可以有兩種結(jié)構(gòu)方案,如圖1所示。方案一為:控制臺由計算機視覺處理模塊、信息傳輸模塊以及遙控模塊組成;飛行端由GPS模塊、信息傳輸模塊、圖像采集模塊、遙控模塊及飛行平臺組成。方案一的優(yōu)點為飛行端結(jié)構(gòu)相對簡單,且任務較少,圖像的處理目標的定位都交由地面控制臺完成,處理速度快速,人機交互方便,成本較低;缺點是圖像傳輸工作量大,容易受干擾,信息傳輸模塊負擔較重。方案二為:控制臺由信息傳輸模塊與遙控模塊組成,飛行端由計算機視覺處理模塊、GPS模塊、信息傳輸模塊、圖像采集模塊、遙控模塊及飛行平臺組成。方案二的優(yōu)點為信息傳輸模塊工作量少,不容易受干擾,圖像可以不用全部傳輸,可以只傳輸一些相對敏感的圖像,除了控制臺還可以發(fā)展多終端接收設備,接收目標定位的結(jié)果信息,可擴展性強;缺點為飛行端結(jié)構(gòu)復雜,工作量大,成本較高。兩種硬件方案各具優(yōu)缺點,在設計時可以根據(jù)實際需求確定采用何種方案,例如:違章建筑搜尋,需要頻繁的人機交互,采用方案一更加便捷;可疑車輛搜尋最終希望處于不同位置的不同人都能實時掌握信息,需要多接收終端,采用方案二更為適合。
使用時,第一步應該首先讓飛行端在標校飛行高度,對攝像頭角度進行調(diào)整,對圖像與實際距離的比例進行記錄。第二步,通過控制臺載入目標信息以及初始飛行參數(shù)等信息。第三步,放飛飛行端,通過控制臺控制飛行端的飛行,并通過控制臺或者其他接收終端接收飛行端傳輸過來的信息進行目標的定位,以此實現(xiàn)區(qū)域的巡查、追蹤或者搜救等目的。
3 航拍定位方法
3.1 坐標系的建立
研究基于計算機視覺技術(shù)的目標航拍定位,需要在大地上和圖像上建立坐標系。涉及到地球坐標系、攝像機坐標系與圖像坐標系,因為只考慮地面目標的定位,坐標系可以只采用水平面坐標系。 地球坐標系是目標空間位置的絕對坐標系統(tǒng),它是全局坐標系, 可以用來描述地球上的任何位置。 攝像機坐標系是以攝像機位置為坐標原點,以正北方向為Y軸的坐標系。圖像坐標系以圖像中心為原點,以飛行平臺艏向為Y軸。圖像坐標系可以由攝像機坐標系旋轉(zhuǎn)ψ(艏向角)得到。
3.2 目標相對航拍器的位置計算
通過航拍圖像標校,得到兩目標相距l(xiāng)0時,在h0的高度上,對應攝像頭圖像上面的距離為c0,當高度不變時有:
其中:l為兩目標相距距離,c為兩目標在航拍圖像上的距離。
當高度變?yōu)閔時則有兩目標距離l為:
設航行器的艏向為ψ,則有攝像頭坐標系中,目標在地面上實際的位置坐標(x,y)為:
即:
3.3 目標絕對位置計算

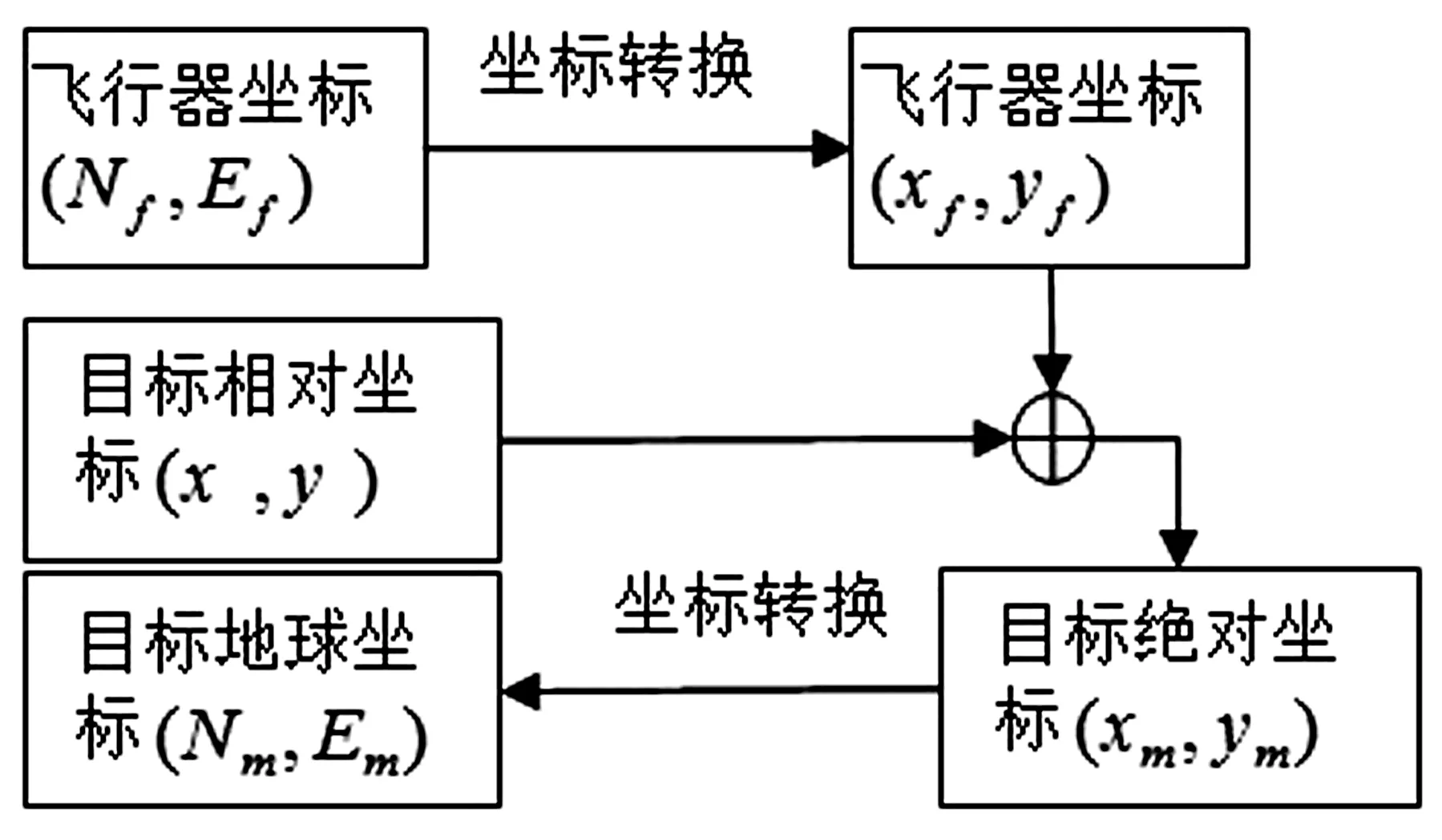
圖2 目標絕對位置計算

圖3 采用航拍器在高空中拍攝的圖像
4 仿真驗證
為了驗證該方法的有效性,在武漢某上空利用航拍器進行了實測檢驗。步驟如下: (1)調(diào)整攝像頭角度,使航拍器水平飛行時,攝像頭恰好位于拍攝區(qū)域正上方即最中心;(2)調(diào)整航拍器飛行姿態(tài),保持其在1米高度水平動態(tài)定位,拍攝水平面上1米長度標尺,得到的圖像中標尺長度為0.0165米并進行記錄;(3)采用航行器在2900米高空拍攝的圖像,并記錄拍攝該照片時航拍器的艏向與GPS獲取的位置坐標。其中黃色的坐標系標識為圖像坐標系標識,矩形框中心為待定位目標。圖像尺寸大小為(15cm*15cm),航拍器記錄拍攝圖片時飛行平臺艏向角為35deg,飛行端攝像頭的位置為(30°37′22.50″'N,114°17′43.43″)。計算機視覺處理模塊第一步處理得到目標在圖像中的位置為(-6.6688cm,2.8442cm),第二步處理得到目標在攝像頭坐標系中的位置坐標為(-1246.8466m,-262.7988m),第三步,對攝像頭位置坐標進行高斯坐標轉(zhuǎn)換并與目標在攝像頭坐標系中的位置坐標相加,并經(jīng)高斯坐標到地球坐標反變換,得到目標的位置為(30°37′36.99″N,114°16′58.69″E)。
5 結(jié)語
基于計算機視覺技術(shù)的目標定位技術(shù)研究在國內(nèi)還處于起步階段,在稽查違章建筑、交警追巡逃逸車輛、海上救援行動等領域均具有重要的現(xiàn)實意義。 由于地面或者海面上物體的位置與航拍圖像上的相點存在幾何對應關系,通過研究它們的對應關系,建立目標在圖像上的位置以及目標在攝像頭坐標系中的位置的幾何關系模型,并通過GPS導入攝像頭的絕對位置,通過坐標轉(zhuǎn)換的手段獲取目標較為精確的地球坐標位置。仿真實驗表明:應用計算機視覺技術(shù)的目標航拍定位方法切實可行,能夠通過航拍手段,快速、便捷、精確的實現(xiàn)目標的定位,可滿足稽查違章建筑、交警追巡逃逸車輛、海上救援行動等領域目標定位的需求。目前只研究了攝像頭位于待拍攝區(qū)域正上方拍攝圖像的定位方法,該種方法對于航拍器的飛行姿態(tài)要求較高,如果飛行姿態(tài)存在誤差,也會影響定位的精度。今后,還需要深入研究任意角度拍攝情況下的目標定位方法,并對定位誤差的來源進行優(yōu)化,降低對拍攝姿態(tài)的要求,使得對飛行平臺的控制性能降低,以期達到便捷、快速、簡單以及低成本的使用要求。
[1] 何林,柳林濤,許超鈐,等. 常見平面坐標系之間相互轉(zhuǎn)換的方法研究:以1954北京坐標系、1980西安坐標系、2000國家大地坐標系之間的平面坐標相互轉(zhuǎn)換為例[J]. 測繪通報,2014(9):6-11.
[2] 呂宇波. 基于航拍圖像的海上目標定位算法研究[D].廈門:集美大學,2012.
[3] 王紅軍,熊俊濤,黎鄒鄒,等. 基于機器視覺圖像特征參數(shù)的馬鈴薯質(zhì)量和形狀分級方法[J]. 農(nóng)業(yè)工程學報,2016(8):272-277.
[4] 李月龍,靳彥,汪劍鳴,等. 人臉特征點提取方法綜述[J]. 計算機學報,2016(7):1356-1374.
[5] 李建才,吳彩霞,羅人述. 基于GPS和GPSOne的雙定位技術(shù)在物流系統(tǒng)中的應用[J]. 物流工程與管理,2014(1):59-61.
[6] 李哲. 建筑領域低空信息采集技術(shù)基礎性研究[D].天津:天津大學,2009.
[7] 姜涌. 基于計算機視覺的導引系統(tǒng)中若干關鍵技術(shù)的研究與實現(xiàn)[D].南京:南京航空航天大學,2006.
[8] 閻肖鵬,王海濤. 基于兩臺雙天線GPS測向單元的靶船測姿方法[J]. 艦船電子工程,2012(5):65-67+106.
[9] 王福麗,陳雪松,韓靜.基于DWT和SVD的視頻水印算法研究[J].黑龍江八一農(nóng)墾大學學報,2014(4):83-86.
[10] 富爽,許杰,邵一峰,等.基于FPGA的實時圖像邊緣檢測器的設計[J].黑龍江八一農(nóng)墾大學學報,2014(4):76-79.
責任編輯:程艷艷
ApplicationofComputerVisionTechnologyinTargetAerialShotLocation
SHIHongyana,WANGJiangtaob
(a.DepartmentofMathematics;b.CollegeofEngineeringTechnology,Yang-EnUniversity,Quanzhou362014,China)
Target aerial shot positioning captures the image information by aerial shot, and then uses the computer vision technology to process the collected image information so as to achieve the target location. According to the information needed for positioning, this paper puts forward the method of data acquisition and target localization. At the same time, it gives the hardware scheme for the target aerial shot positioning. The simulation results verify the effectiveness of the contents of the collected data and the method of the target location. Maritime rescue departments can use the aerial equipment to patrol the waters within the jurisdiction and immediately grasp the location information of the ship to search and rescue if there is an accident happened.
computer vision technology; aerial positioning; hardware scheme
2017-03-12
福建省教育廳中青年教師教育科研項目(JA15581)
石紅巖(1983-),男,山東鄆城人,講師,碩士,主要從事密碼學、計算機視覺方面研究;王江濤(1980-),男 ,山東威海人,副教授,碩士,主要從事密碼學、計算機視覺方面研究。
TP391
A
1009-3907(2017)04-0008-04
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數(shù)學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
消費導刊(2017年20期)2018-01-03 06:26:40
中華手工(2017年2期)2017-06-06 23:00:31
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
