高精度石英加速度計采集電路設計
2017-05-24 09:52:15郝鵬,張偉,陳銳
傳感技術學報 2017年5期
郝 鵬,張 偉,陳 銳
(1.西安飛行自動控制研究所,西安 710065;2.中國人民解放軍駐航天210所軍事代表室,西安 710065)
?
高精度石英加速度計采集電路設計
郝 鵬1*,張 偉2,陳 銳1
(1.西安飛行自動控制研究所,西安 710065;2.中國人民解放軍駐航天210所軍事代表室,西安 710065)
從高精度捷聯慣導系統加速度計信號采集需求出發,設計了一種高精度、低功耗、小型化的加速度計信號采集方案,采用數字補償方案對轉換電路的零位和標度因數溫度系數進行了補償校準,補償后其全溫指標提高了一個數量級。經實際電路測試驗證,其在-55 ℃~+85 ℃溫度范圍內的標度因數全溫變化小于0.5 ppm/℃,全溫零位小于10 μg,標度因數年重復性達到10 ppm,電路常溫功耗僅為1.8 W,測試結果表明該電路方案滿足高精度捷聯慣導系統應用需求。
捷聯慣導系統;加速度計信號采集;數字補償;標度因數
高精度、長航時、小型化、低功耗一直是捷聯慣導系統的發展趨勢[1],其對傳感器及其電子組件的綜合性能提出了更高的要求,而加速度計及其采集電路作為其關鍵組件直接影響慣導系統的精度性能[2]。石英撓性加速度計以其高精度、低功耗、良好的穩定性和溫度特性,一直作為高精度捷聯慣導系統的加速度計敏感組件[3]。其輸出模擬電流敏感加速度計變化,后端采集電路主要完成加速度計輸出電流的數字轉換,并提供給計算機進行慣性解算處理。
國外高精度石英撓性加速度計采集電路主要以Honeywell公司的電流/頻率轉換(I/F)方案和早期Litton公司的數字量化方案最具有代表性[4-6]。I/F轉換方案相比電壓/頻率轉換(V/F)方案、電壓/時間轉換(V/T)方案等少了前級電流/電壓轉換(I/V)誤差環節,并具有零位小、電路簡單、頻率輸出易于后端數字電路處理等優點,被廣泛應用于高精度加速度計采集電路中[7-8]。但由于I/F轉換電路采用恒流源反饋,其電路功耗大,啟動時間長,在高精度應用場合需配溫控電路,因此無法滿足小體積、低功耗的捷聯慣導系統應用需求。數字量化方案主要將加速度計輸入電流轉換為電壓量,通過對電壓量進行積分、采樣以及數字濾波和解算處理實現轉換功能,該方案具有啟動速度快、刻度系數大、電路集成度高等優點,雖增加了I/V轉換環節,但可通過數字濾波處理和數字補償方案提高電路零位和標度因數的全溫性能指標,適合于對于精度、體積、功耗綜合要求高的應用場合。
本文為實現高精度加速度計信號采集,同時解決低功耗、小型化等工程化應用問題,基于現場可編程門陣列(FPGA)+模數轉換器(ADC)構建了積分測斜式的數字量化方案。
1 原理方案分析
本文針對某型捷聯慣導系統設計需求,其前端石英撓性加速度計標度因數為(1.25±0.2)mA/g,量程±20gn,年重復性指標為2×10-5gn,根據系統指標分解要求采集電路的穩定性和重復性達到10 ppm,分辨率優于1 nA,零位全溫小于20 μg,標度因數非線性和溫度系數全溫均小于50 ppm,電路功耗小于2 W。
綜合考慮設計需求,建立積分測斜式量化方案的數學模型,分析關鍵電路設計指標,電路方案數學模型見圖1所示。
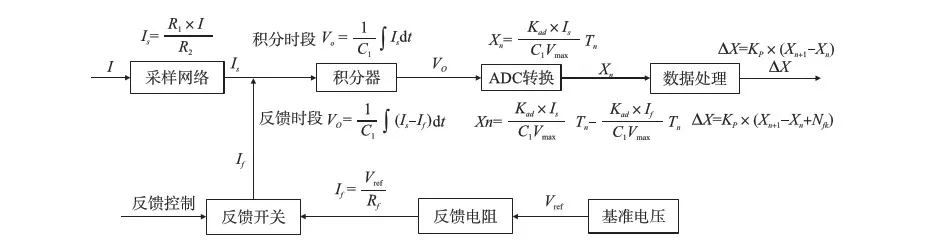
圖1 電路方案數學模型
加速度計輸出電流經過采樣網絡后進入積分器,積分后輸出電壓V0,V0通過ADC的定時采樣得到Xn,由Xn+1-Xn可以計算出積分器電壓斜率,斜率正比于輸入的加速度計電流,從而可以計算出加速度計的輸出電流。當積分器達到反饋門限電壓±Vmk時接入反向基準電壓,保證積分器工作在最優線性區,避免積分器飽和,積分器輸出和采樣波形見圖2所示。
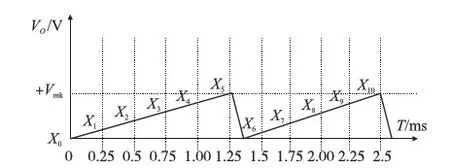
圖2 積分器輸出和采樣波形
采集電路采用積分測斜的數字量化方式,計算單位時間內的積分增量,則:
積分過程的量化斜率輸出為(小于積分門限,反饋未接入):
(1)
反饋過程的量化輸出為(大于積分門限,反饋接入):
(2)式中:R1為采樣電阻,R2為積分器輸入電阻,Rf為基準反饋電阻,C1為積分電容,ΔT為A/D采樣時間間隔,ΔTf為基準反饋時間,Vmax為A/D轉換器的滿量程電壓,Kad為A/D轉換器的滿量程電壓對應碼值,Kp為標度因數歸一化系數,Nfk為積分標定反饋量。
由圖1原理簡圖及式(1)、式(2)可知,數字量化器誤差源主要包括采樣電路誤差[9]、A/D轉換誤差、積分器誤差[10-11]、基準反饋誤差。因此為滿足整體量化指標需求,各子電路設計指標應滿足整體指標1個數量級的設計余量。其中模擬電路和模擬器件的設計和選型決定整個方案的性能基礎,電阻應選取低溫漂、高穩定性的合金箔電阻器,積分電容應選取長期穩定性好、溫度系數小的有機電容器,積分器和基準電路設計需兼顧電路直流特性指標和交流特性指標的綜合要求。數字電路部分主要為低功耗、小型化的設計核心,應最大程度簡化模擬電路設計復雜度,提高電路集成度。
2 電路方案設計
本文構建了基于FPGA+ADC的積分測斜式的量化方案,其功能框圖如圖3所示。
輸入電流通過采樣網絡轉換為輸入電壓,輸入電壓經積分器輸入同步采樣ADC進行模數轉換,FPGA通過并行總線獲取ADC量化值并檢測積分門限,控制反向電壓基準接入,避免積分器飽和,同時FPGA完成積分電壓信號的增量采樣,計算積分斜率從而獲得與加速度電流對應的數字量,解算數字量通過RS422總線發送給導航計算機。外部電可擦除存儲器(E2PROM)存儲采集電路標度因數溫度系數補償值,用于采集電路標度因數溫度系數自補償,溫度傳感器用于采集電路的實時溫度獲取,加速度計溫度采集用于提供系統傳感器補償的實時溫度數據。

圖3 原理方案功能框圖
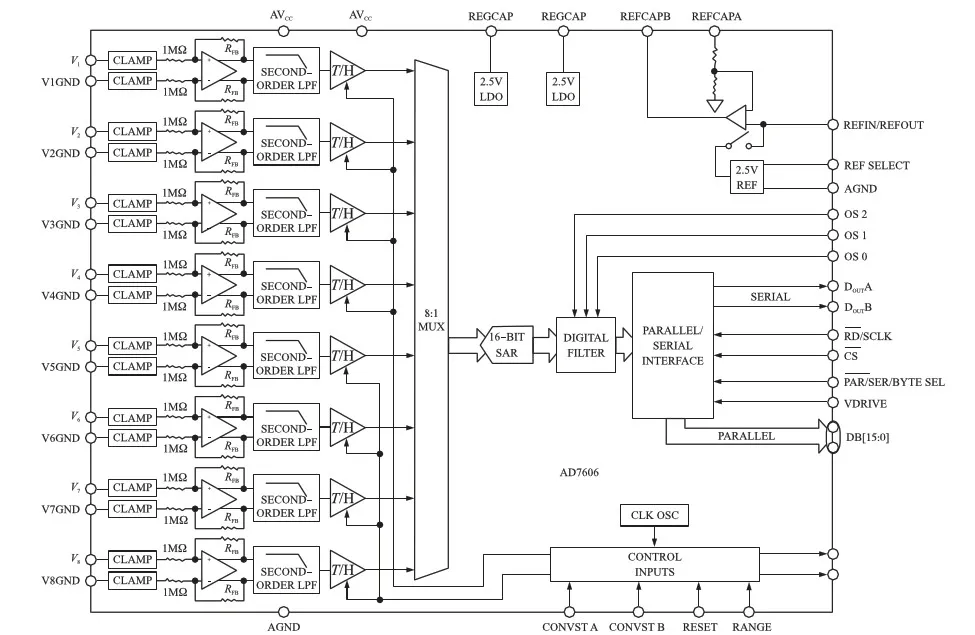
圖4 AD7606功能框圖
其中ADC芯片和FPGA為電路主要核心數字器件,其集成度和功耗直接決定整個采集電路能否滿足小型化低功耗設計需求。因此本設計中選用ActelProASIC3系列的A3P1000低功耗FPGA,其尺寸僅有13mm×13mm,100萬門邏輯資源,片上自帶Flash非易式存儲器,單片可完成所有采集電路的控制、解算、補償,實際采集電路使用邏輯資源90%,而實測動態功耗僅為0.2W。
ADC芯片選用ADI公司的8通道16位同步采樣ADC芯片AD7606[12],AD7606的功能框圖見圖4所示。該ADC芯片集成8路16位同步ADC,可滿足4路傳感器信號和4路溫度信號的采集量化,同步采樣可減低三路加速度計信號采集的通道延時,同時AD7606內部集成輸入緩沖器、嵌位保護電路、二階抗混疊模擬濾波器以及可與FPGA直接交聯的輸出驅動接口,大大減少外圍電路器件數量,同時其動態功耗小于0.15W,是理想的單片解決方案,采用該數字方案可在70mm×70mm電路板尺寸下實現完整采集電路功能。
3 補償方案設計
采集電路主要完成傳感器模擬電流信號的轉換,其電路靜態誤差模型與加速度計靜態模型相似[13],設輸入電流為變量x,輸出數字量為變量y,可得理想轉換式(3),考慮到電路誤差等影響因素,實際轉換結果見式(4)。
y=kx
(3)
y=k0+k1x+k2x2+…+kN-1xN-1+kNxN
(4)
而對于電路特性指標,一次項以上高階項可忽略,因此誤差源主要包括標度因數k1以及實際轉換電路的偏值誤差k0。電路常溫指標設計易于實現,但由于器件本身溫度系數影響,全溫指標難以滿足指標需求,因此必須對其全溫誤差進行補償,即全溫零位補償和標度因數溫度系數補償。
本文采用四通道校零方案消除全溫零位偏差,其電路原理見圖3所示。三軸加速度計電流信號流入采集電路校零開關,通過控制校零開關時序,在單位工作周期內將三路加速度計輸入電流分別切換到AIN通道,同時本通道輸入斷開用于測量通道零位,通過FPGA在每單位周期用測量值減去上一個周期的通道零位測量值以消除零位影響。
標度因數隨溫度變化,傳統溫度補償采用分點定溫建模和二階或多階線性擬合的溫度補償方式[14]。雖電路實現簡單,但需多個定溫保溫過程,其建模測試時間長,且與系統實際變溫的使用情況相差較大,補償模型的魯棒性差,特別是對于高低溫下非線性趨勢加劇的補償對象,難以保證補償效果的一致性。因此本文采用標度因數的查表補償法,首先對電路標度因數進行全溫下的慢變溫測試建模[15],為兼顧測試效率和補償效果選取1min1 ℃的升溫速率,分別施加正負激勵電流,實時采集-55 ℃~+85 ℃溫度變化范圍內標度因數輸出值,從-55 ℃開始取每(5.0±0.5)℃間隔的測試數據平均值計算該溫度點的刻度系數補償值,全溫共29個補償點。并通過上位機串口加載參數存儲于電路的E2PROM中,FPGA通過溫度傳感器實時獲取溫度測量值,查表獲得E2PROM對應溫度的標度因數補償值進行溫度補償,每5 ℃范圍內采用兩點間線性擬合,其補償參數標定和補償工作流程見圖5所示。溫度補償參數建模需結合系統使用環境考慮溫升速率的影響,補償電路的設計需折中考慮補償性能和動態特性要求。
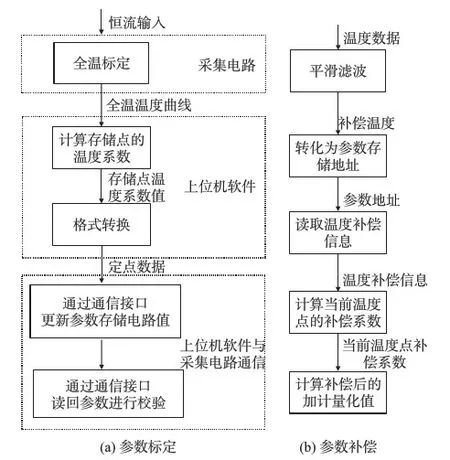
圖5 參數標定和補償流程圖
4 試驗結果
對采用該方案原理設計的采集電路進行實際性能測試,按照使用要求取10s累加值作為單位測試數據,全溫測量范圍為-55 ℃~+85 ℃,測試時采用高精度恒流源模擬加速度計輸入電流,同時將測試電路置于溫箱中,以準確測量采集輸出隨溫度變化特性。
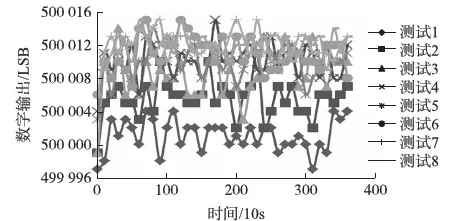
圖6 年重復性測試數據
4.1 穩定性和重復性指標
測量采集電路的年逐次啟動重復性和啟動時間,測量重復性時確保每次測量環境溫度在(30±5)℃,采集電路均采用冷啟動,即必須保證關電時間大于30min,以準確檢測啟動時間的重復性,每月測量一次,共測量8次,每次測量時間1h,輸入電流1.25mA,對應輸出刻度系數為40 000LSBmA/s,X通路測試結果的數據擬合見圖6所示,其橫坐標10s為1點,縱坐標為輸出數字量碼值大小。
由圖6測試結果,指標計算從第2點即20s開始計算,穩定性指標計算采用1h測量輸出1б標準偏差除以其平均值計算,重復性指標計算采用多次測量輸出平均值的1б標準偏差除以多次測量平均值計算,Y、Z通道計算方法相同,可得其采集電路穩定性指標小于5ppm,年重復性指標小于10ppm,已達到0.4nm/h高精度導航系統指標要求,且啟動時間小于20s,滿足系統快速對準使用要求。
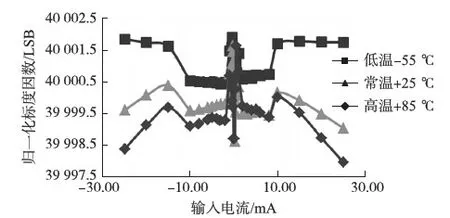
圖9 全溫標度因數非線性
4.2 零位和標度因數全溫指標
將采集電路放于高低溫箱中,分別測量其零位全溫變化、標度因數全溫變化以及全溫下的標度因數非線性指標。零位測量時斷開輸入恒流源,標度因數溫度系數測量時分別輸入±1.25mA電流,非線性測量時輸入電流序列,每單位測量點加激勵1min,輸入電流序列為:±0.1mA、±0.2mA、±0.3mA、±0.4mA、±0.5mA、±1.0mA、±2.0mA、±3.0mA、±4.0mA、±5.0mA、±6.0mA、±8.0mA、±10.0mA、±15.0mA、±20.0mA、±25.0mA。以X通道為例的數據測量結果分別如圖7~圖9所示。
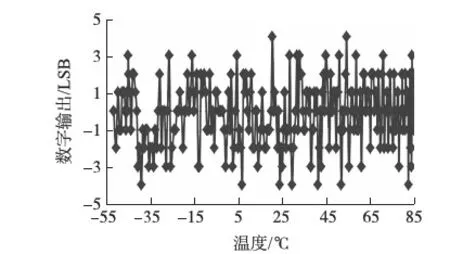
圖7 全溫零位變化
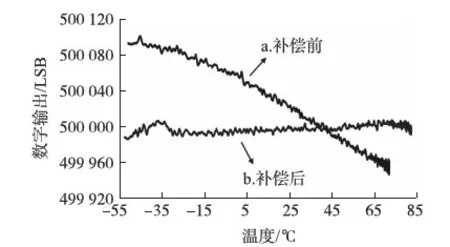
圖8 標度因數全溫變化(+1.25 mA)
由圖7~圖9測試結果,計算其相應指標值。零位全溫變化均小于5LSB/10s,由標度因數設計值40 000LSBmA/s(1g輸入為1.25mA)可得對應零位全溫變化均小于10μg,標度因數溫度系數小于0.5ppm/℃,補償后的全溫變化對于系統級使用可忽略,電路可作為獨立可更換組件,無需系統級補償,簡化系統應用。標度因數非線性按照標準偏差法計算對應全量程輸入下的歸一化誤差,可得在高溫、低溫、常溫下其標度因數非線性指標均小于30ppm,滿足系統使用要求。
4.3 變溫速率對補償效果的影響
由圖7、圖8計算可得采用本文的補償方法可獲得理想的全溫特性指標,但由于實際系統的工作環境溫度變化速率不同,需評估補償方法對實際變溫速率變化的適應性,以確定補償算法的魯棒性。這里根據實際系統使用環境要求,采集電路溫度補償建模采用1min1 ℃變溫模型。驗證測試分別采用1min1 ℃、2 ℃、3 ℃和實際系統變溫曲線(1h15 ℃)4種溫度模型進行驗證,輸入電流1.25mA,測試數據的擬合曲線見圖10所示。由圖10可得在不同變溫速率下,采用該補償模型的補償結果均可達到0.5ppm/℃的標度因數溫度系數指標。
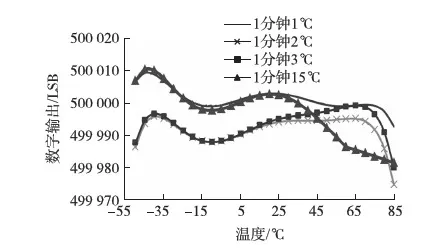
圖10 不同變溫速率的補償效果
5 結束語
本文設計的高精度石英加速度計信號采集電路,采用了數字解決方案實現了采集電路的集成化、低功耗、數字化設計。另外采用數字自補償方案將采集電路的零位和標度因數全溫指標提高了一個數量級。實測數據表明該采集電路的啟動時間小于20s,標度因數重復性達到10ppm、標度因數溫度系數小于0.5ppm/℃、零位全溫變化小于10μg,標度因數非線性小于30ppm,帶寬大于1kHz,功耗僅為1.8W。該電路方案解決了傳統I/F方案功耗大、啟動時間長的問題,同時彌補了V/F方案I/V轉換環節帶來的零位偏置和溫度系數大等問題,其綜合性能滿足輕小型化高精度捷聯慣導系統和旋轉調制系統的工程化應用要求。
[1] 劉智平,韓宗虎. 國外光學捷聯慣導系統的技術現狀和捷聯慣導發展趨勢[J]. 航天控制,2012,30(5):94-99.
[2] 鮑海閣,趙濤,王國臣,等. 捷聯慣導高精度加速度計信號采集單元的設計與實現[J]. 傳感技術學報,2011,24(1):53-58.
[3] Beitia J,Clifford A,Fell C,et al. Quartz Pendulous Accelerometers for Navigation and Tactical Grade Systems[C]//Inertial Sensors and Systems Symposium(ISS),2015 DGON. Karlsruhe:ISS,2015:1-20.
[4] AN/ASN-139(LN-92)Carrier-Based Aircraft Inertial Navigation System(INS)[DB/OL]. AVIC Digital Libary,2009:1-2.
[5] Chamberlin,Douglas A.Honeywell Inertial Systems for Interceptor Applications[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit 2001.Montreal:AIAA,2000:5-6.
[6] Longstaff I,Ellms S,Goussak K,et al. The Litton LN-100 Advanced Technology Medium Accuracy Lightweight Inertial Navigation System[C]//AIAA Conference 1993.Hilton Head Island:AIAA,1993:1-5.
[7] 黃麗娟,邵志浩,鄭永強,等. 加速度計I/F變換電路數字補償方法[J]. 中國慣性技術學報,2014,22(4):547-551.
[8] 周璐,劉晴晴,譚新洪. 捷聯慣導系統中加速度計的信號采集[J]. 航天控制,2014,32(2):18-22.
[9] 馬佳智,段風陽,郭全. 慣性加速度計電流電壓轉換誤差研究[J]. 計測技術,2012,32(5):41-46.
[10] 姜榮鎮,張志鑫,朱紅升,等. 電流積分器對I/F轉換性能的影響分析[J]. 導航與控制,2011,10(1):62-67.
[11] 劉冬梅,萬寶年,何怡剛,等. EAST中高精度長時間積分器系統的研究[J]. 計算機仿真,2013,30(11):246-250.
[12] Analog Devices,Inc. AD7606 16 bit,8 channel Simultaneous Data Acquisition ADC[S]. 2010:1-33.
[13] 鄭長勇,陳軍寧. 一種新型MEMS加速度計溫度補償方法研究[J]. 傳感技術學報,2015,28(1):39-42.
[14] 俞舟平,葉凌云,李嘉鴻. 傳感器信號采集電路啟動時標度因數補償研究[J]. 傳感器與微系統,2013,32(9):28-34.
[15] 李漢舟,潘泉,王小旭,等. 溫控和溫補相結合的高精度激光慣性導航系統[J]. 中國慣性技術學報,2013,21(5):585-590.
Design of High-Precision Quartz Accelerometer Signal Acquisition Circuit
HAO Peng1*,ZHANG Wei2,CHENRui1
(1.Flight Automatic Control Research Institute,Xi’an 710065,China;2.Military Representative Office in the 206 Research Institute of China Aerospace Science and Industry Corporation,Xi’an 710065,China)
Based on the accelerometer signal acquisition requirement of the high precision strapdown inertial navigation system,this thesis proposes a new design scheme,which has the advantages of high precision,low power consumption and miniaturization. Meanwhile,digital compensation method is used to improve the precision of zero bias and scale factor in full temperature range by one order. Test data shows that the temperature coefficient of the circuit scale factor is below 0.5 ppm/℃,zero bias is below 10 μg in -55 ℃~+85 ℃ temperature range,and the scale factor repeatability of a year is below 10 ppm,power consumption is 1.8 W. The test results indicate that the circuit scheme meets the requirement of SINS.
strapdown inertial navigation system;accelerometer signal acquisition;digital compensation;scale factor

郝 鵬(1986-),男,陜西西安人,中航工業西安飛行自動控制研究所工程師,碩士,主要從事慣性傳感器信號采集電路的設計研究,haopengbestman@126.com;

張 偉(1980-),男,陜西西安人,中國人民解放軍駐航天210所軍事代表室工程師,碩士。專業方向為計算機應用與技術;主要從事導航制導與控制;

陳 銳(1988-),男,陜西西安人,中航工業西安飛行自動控制研究所工程師,碩士,主要從事慣性傳感器信號采集電路的設計研究。
2016-10-19 修改日期:2017-01-16
TH824.4
A
1004-1699(2017)05-0678-06
C:7230
10.3969/j.issn.1004-1699.2017.05.008