基于MIMU的輸電線路運動監測技術*
2017-05-24 09:52:15楊金顯王鵬飛羅宇鋒李雙磊
傳感技術學報 2017年5期
楊金顯,王鵬飛,羅宇鋒,楊 闖,李雙磊
(1.河南理工大學電氣與自動化學院,河南 焦作 454003;2.國網山東臨朐縣供電公司,山東 臨朐 262600)
?
基于MIMU的輸電線路運動監測技術*
楊金顯1*,王鵬飛1,羅宇鋒1,楊 闖1,李雙磊2
(1.河南理工大學電氣與自動化學院,河南 焦作 454003;2.國網山東臨朐縣供電公司,山東 臨朐 262600)
在分析當前輸電線運動監測技術優缺點的基礎上,提出一種基于MIMU的輸電線路運動監測技術。采集MIMU時間序列信號建立ARMA模型,對比力和角速度信號進行Kalman濾波處理;由于平動和轉動的幅值是由比力和角速度積分所得,以各軸比力平方和與角速度平方作為衡量輸電線平動和轉動幅度的標準,并對數據進行分段,通過計算數據段間的歐式相似度衡量數據的變異程度來評估輸電線平動和轉動的幅度及變化趨勢,對測得加速度和角速度做FFT變換得出運動頻率。為驗證運動監測技術,設計轉臺搖擺模擬輸電線3種不同幅值運動,將數據進行上述算法處理,結果表明,估計出的平動和轉動幅度趨勢和幅值變化相同,且精確識別施加的頻率為2Hz。實驗室條件下,搭建的模擬系統正常工作。
MIMU;輸電線;運動監測;時間序列模型;相似度
輸電線路運動監測是智能電網建設的關鍵技術之一,由于自然環境的影響,輸電線在一定的氣象條件下出現運動現象。輸電線運動主要包括微風振動、次檔距振蕩和覆冰舞動。微風振動高頻(約3 Hz~150 Hz)微幅(一般不超過導線直徑),次檔距振蕩中頻(約1 Hz~3 Hz)中幅(0.1 m~0.5 m),覆冰舞動低頻(約0.1 Hz~3 Hz)大振幅(約為導線直徑的5倍~300倍)[1]。這3種形式的運動給輸電線路帶來了很多危害,而3種運動本質上屬于自激振動。在低頻范圍內,振動強度與位移(振幅)成正比;在高頻范圍內,振動次數多,過程短,加速度計的數值及變化量大,振動強度大,故對頻率的監測較為重要。綜上,在輸電線運動中,對幅值和頻率兩個參數的監測必不可少。同時,所監測的運動數據對后續防舞防振策略的制定提供數據支撐。
近年來,輸電線路運動在線監測技術發展迅速,主要有基于加速度計的在線監測[2]和基于慣性測量單元IMU(Inertial Measurement Unit)的在線監測[3-4]。基于加速度計的在線監測法是指將安裝在線路上的多個加速度計作為監測裝置節點,通過對其進行二次積分還原被測點空間位移變化情況的一種方法。加速度計在實際應用中存在節點布置和隨導線扭轉等問題。節點布置主要涉及節點數量的選擇,安裝的節點越多,曲線擬合的精度越高,相應的成本和軟件計算量也增大;反之擬合精度降低,運動軌跡估算不準確。加速度計隨導線發生扭轉時,導致計算出的相對位移與實際運動偏差較大,無法還原出導線的真實運動軌跡。為了解決導線扭轉對監測的影響,出現了基于IMU的在線監測法,該監測法與基于加速度計的在線監測法類似,只是將輸電線路上安裝的加速度計換成了IMU。由于IMU可以同時輸出輸電線路運動的比力和角速度,因此,它不僅可解算出被測點運動時的位移變化情況,還能獲取被測點運動時的扭轉情況,較完整的還原輸電線路的運動姿態。基于IMU的在線監測雖然避免了監測點隨導線扭轉對監測精度的影響,但依賴于多個高精度IMU的安裝,且通常每檔距要安裝3個以上的IMU,過多的高精度IMU安裝不僅成本較高,還可能對輸電線路數學模型造成影響。除此之外,由于陀螺漂移的存在,實際操作中往往存在較大的姿態解算誤差。
基于MIMU(Micro Inertial Measurement Unit)的輸電線運動監測技術,將低成本的MEMS(Micro Electro Mechanical Systems)慣性器件用作運動監測,以處理后的各軸比力平方和與角速度平方作為衡量輸電線平動和轉動幅度的標準,將相似度理論[5-7]用于平動和轉動幅度的評估,不僅避免了解算誤差,而且在實際工程應用中有較大優勢。實驗驗證此技術可準確監測輸電線運動狀態,適用于輸電線運動在線監測。
1 MIMU輸電線運動監測系統設計
在現有輸電線路監測系統基礎上,設計了MIMU輸電線運動在線監測系統,實現導線平動和轉動幅度估計及運動頻率識別。該系統結構如圖1所示,系統包括導線運動監測裝置CMD(Condition Monitoring Device)、氣象傳感器、狀態監測代理CMA(Condition Monitoring Agent)、狀態信息接入網關機CAG(Condition Information Acquisition Gateway)、通信網絡等[1]。其中CMA及各類氣象傳感器安裝在桿塔上,氣象傳感器通過RS485與CMA通訊。CMD安裝在導線上,每個待測導線檔距間只需在距檔端1/8處安裝一個,以避開常見舞動半波的節點(節點處運動位移為0)。對CMD進行防磁干擾處理。CMD完成對數據的預處理后將處理后的數據通過光纖通信傳輸至CMA,CMA通過對監測數據進行既定算法處理得出導線運動狀態,結合氣象信息做出預警信息,將預警信息和處理后的數據打包通過專用光纖傳輸通道發給CAG,在CAG的專家軟件進行狀態顯示。
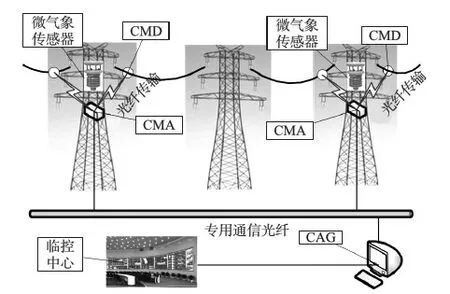
圖1 系統總體示意圖
CMD和CMA等都采用跳塔安裝方式,即每隔一個桿塔安裝一套監測裝置,可大大降低監測成本,其監測的信息也能根據所設計的算法準確得出輸電線運動狀態。
系統選用地理坐標系作為導航坐標系,CMD安裝坐標系如圖2所示,即載體坐標系。載體坐標系與地理坐標系間可由姿態矩陣進行轉換。CMD由主控制器、電源模塊、慣性傳感器和通信模塊組成。其中主控制器采用STM32F103C8T6處理器;電源模塊采取導線就地取電配合鋰電池的方式進行供電;慣性傳感器選用集三軸加速度計和陀螺儀為一體的全MEMS慣性器件MPU6050來測量比力和角速度信息。
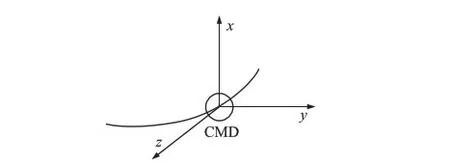
圖2 CMD安裝坐標系
狀態監測代理CMA安裝在桿塔中部,由控制器、氣象傳感器、電源模塊和通信模塊組成。選用太陽能電池板和蓄電池組合供電;通過光纖接收CMD預處理后的數據,氣象傳感器通過RS485和CMA通訊;選用ARM內核芯片STM32F103VET6作為控制器。
2 算法設計
對輸電線運動的監測,主要關注輸電線平動(水平、垂直運動)和扭轉運動的幅值與頻率。由于輸電線運動的復雜性,要實現對輸電線運動軌跡的精確還原不僅成本較大,且不免存在解算誤差,因此提出的輸電線平動及扭轉幅度是對輸電線整體運動及扭轉運動幅值的一個估計量,經過實驗標定可以準確反映輸電線運動狀態:首先對MIMU數據建立時間序列的ARMA模型,并采用Kalman濾波進行信號處理[8-10],以各軸比力平方和作為衡量輸電線平動幅度的標準;然后將所得平方和數據進行分段,通過監測數據段間的相似度衡量數據的變異程度,進而進行輸電線平動幅度的評估。同理,對角速度平方進行相似度計算評估扭轉幅度,對IMU輸出的加速度和角速度數據做快速傅里葉變換FFT(Fast Fourier Transformation)得出運動頻率[11-12],其算法流程如圖3所示。
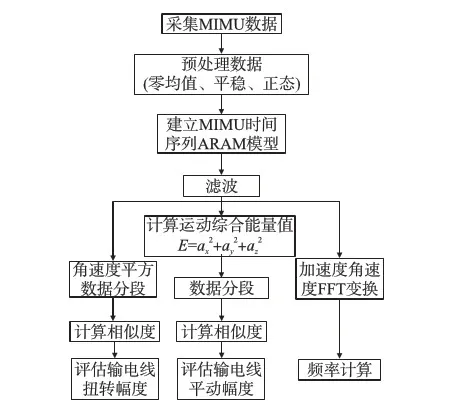
圖3 輸電線運動監測算法流程
2.1 MIMU數據預處理、建模及濾波
首先采集MIMU數據,由于MIMU系統采集的數據具有高噪聲等特點,微慣性器件存在常值偏置、器件溫度漂移誤差、陀螺儀的漂移等。同時,在對MIMU信號建立時間序列模型時,首先應保證該組信號為零均值、平穩、正態時間序列。常值分量可以通過求均值來提取,去掉常值分量后,該信號應為零均值信號,同時,對信號進行多項式擬合去除趨勢項,得到平穩的零均值信號。預處理后的數據具有平穩、正態的零均值等時間序列特性,可建立滑動自回歸模型ARMA。依據隨機序列自相關系數函數(ACF)和偏相關系數函數(PACF)的“拖尾”和“截尾”性質進行模型辨識。其中ARMA模型特點如表1所示。
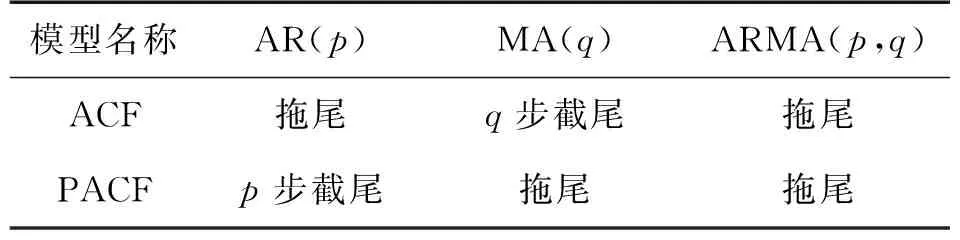
表1 ARMA(p,q)模型特點
對于含N個觀測數據的一個時間序列樣本x(1),x(2),x(3),…,x(N),其樣本均值為:
(1)
樣本自協方差函數:
(2)
樣本自相關系數函數:
(3)
樣本偏自相關系數函數可以通過如下簡潔的偏自相關系數函數的遞推公式求得:
(4)
xt=a1xt-1+a2xt-2+…+apxt-p+wt
(5)
式中:ai(i=1,2,…,p)為自回歸參數;wt為高斯白噪聲序列。
(6)
(7)
(8)
針對時間序列建模的缺陷,采用Kalman濾波的最優估計思想,對建立的時間序列數據進行優化。
卡爾曼濾波方程的狀態空間模型為:
(9)

設系統的輸出為Zk=Xk,則輸出方程中的系數為H=[1 0]T,易知:
(10)
2.2 輸電線平動幅度評估
輸電線運動時水平、垂直、扭轉運動同時發生,軌跡截面圖是一種不規則或部分不規則橢圓,如圖4所示,本文將水平、垂直運動統稱平動。
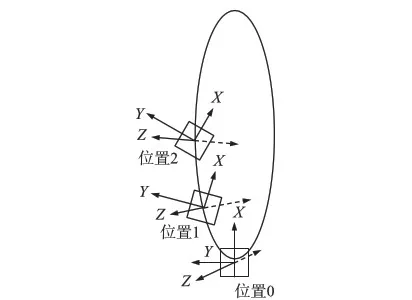
圖4 輸電線運動截面圖
加裝在輸電線上的CMD可以測得三軸加速度ax,ay,az,由此加速度可得輸電線x,y,z三軸速度近似為:
vx=axΔt、vy=ayΔt、vz=azΔt
(11)
設導線質量為M,則導線運動能量可表示為:
(12)
根據以上加速度和速度的線性關系,輸電線總的運動能量可用下式來衡量:
(13)
由于各軸比力的大小不僅反映各軸的動能能量,也反映輸電線各軸的受力大小,且平動幅值是由加速度積分所得,所以,E反映了某時刻輸電線的綜合運動幅度。由于輸電線水平、垂直運動時還存在扭轉運動,比力信息中存有的重力加速度較難分離,可以用E作為估計平動幅度的標準。
用濾波后的加速度數據計算E值,Ei為其中一個長度為n數據序列,將Ei平均分割成長度皆為m的n-m+1段,得到數據矩陣為:
(14)

Dnor=di/dmax+ε
(15)
dmax為出現的最大歐式距離;Dnor∈(0,0.2)說明輸電線運動幅度小;Dnor∈(0.3,0.8)說明輸電線運動較劇烈;Dnor∈(0.8,1)說明此時輸電線運動劇烈,需及時采取相關措施并保存監測數據。
2.3 輸電線扭轉幅度評估
2.4 輸電線運動頻率識別
輸電線運動本質上是一種周期性的自激振動,監測系統通過連續采樣形成連續信號,傅立葉原理表明,任何連續測量的信號或時序,都可以表示為不同頻率的正弦波信號的無限疊加。輸電線運動的頻率范圍0.1Hz~150Hz,系統采樣頻率最高為512Hz,可精確采集舞動特征量。對經去噪得到512個樣本進行512點的快速傅里葉變換(FFT),得到512個點的復數序列,每一個復數可以表示信號在某一個頻率下的特征,如下式:
fn=(n-1)(fs/N)
(16)式中:fn為信號頻率,單位:Hz,n為第n個點,fs為采樣頻率,單位:Hz,N為FFT變換點數。FFT利用測量到的加速度或角速度信息,分段進行FFT變換,幅值最大處所對應的頻率即此段數據所對應的頻率。
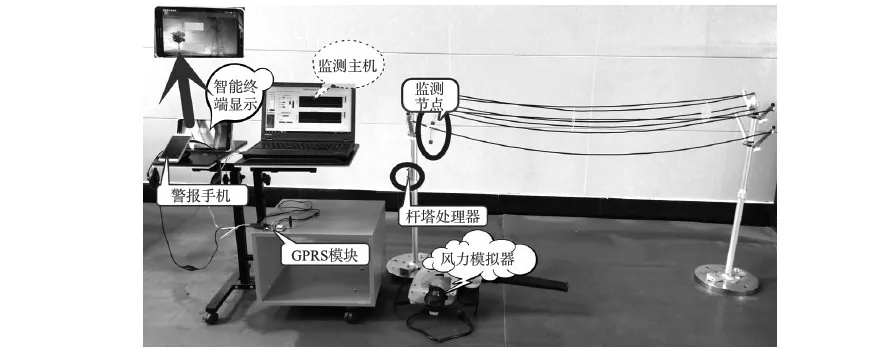
圖7 實驗平臺和監測主機
3 實驗驗證
3.1 算法驗證
將CMD固定在轉臺邊緣,使之做搖擺運動近似模擬輸電線運動。令轉臺進行固定頻率為2Hz,轉動幅度分別為0.2°、0.5°、1.0°的搖擺運動。采樣頻率調至50Hz,每種運動取1 024個特征點,將3種運動數據拼接共3 072個特征點,經上述算法處理得出運動能量波形變換和估計出的平動幅度變化如圖5所示。
由圖5可見,算法所估計的平動幅度變化準確反映輸電線運動總能量變化;FFT變換后的頻譜圖如圖6所示,易知幅度最高點0.178 2所對應的頻率為2Hz,即準確識別了運動頻率。以上表明,此算法可估計輸電線平動幅度并直觀反映運動趨勢,且能精準識別出某時刻的運動頻率。

圖5 輸電線運動能量和平動幅度評估
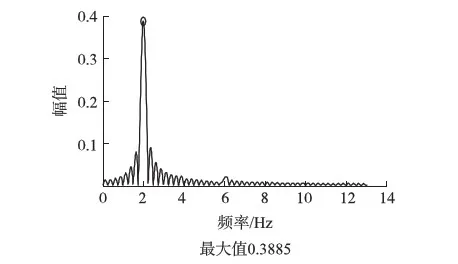
圖6 識別頻率幅頻圖
3.2 系統測試
搭建了輸電網絡運動測試平臺如圖7所示,CMD安裝檔距的1/8處。用鼓風機模擬自然風進行系統在線監測可靠性測試。測試表明,此系統可以監測運動情況并在自主開發的專家軟件(圖中監測主機)實時顯示運動(平動、扭轉)幅度、頻率、微氣象信息等,設置有超限報警功能,報警閾值可調,異常情況數據存儲庫,開發了智能終端監測軟件,局域網條件下,可在智能終端查詢相關信息。實驗室條件下,該套系統能正常運行。
抽取一些運動幅度超限的數據進行離線分析,計算輸電線運動能量,評估平動幅度,并對此時數據進行FFT變換。結果如下:
由圖8可以看到,數據點2 500處能量E變化較大,幅度曲線越過0.9,此時輸電線運動劇烈,系統發出警報信息。圖9為此時刻幅頻圖,其中幅值最大點所對應的頻率即為此時刻輸電線運動頻率。
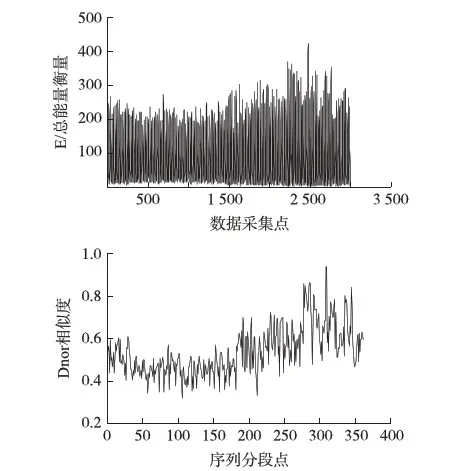
圖8 實測平動幅度估計
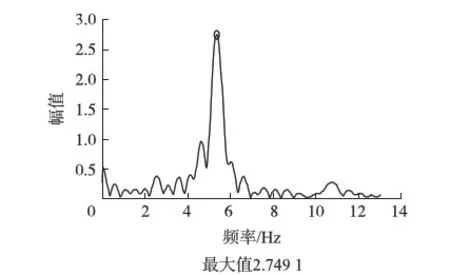
圖9 超限時刻幅頻圖
4 結論
本研究通過對MIMU系統采集的MIMU信號數據進行時間序列的ARMA建模,并利用卡爾曼濾波對信號進行處理,對處理后的數據,提出了一種輸電線運動幅度衡量標準,根據數據段相似理論,評估輸電導線的平動幅度和扭轉幅度,利用FFT變換準確求得輸電線運動頻率。實驗表明,此方法能夠有效地評估輸電線平動幅度和扭轉幅度、得出運動頻率。除此以外,本設計還具有成本低、安裝方便、數據計算量小等工程方面的優點。以上表明,此方案算法可以有效用于輸電線路運動的監測。
[1] 戰杰. 輸電線路狀態監測診斷技術[M]. 北京:中國電力出版社,2014.
[2] 張帆,熊蘭,劉鈺. 基于加速度傳感器的輸電線舞動監測系統[J]. 電測與儀表,2009(1):30-33.
[3] 黃新波,趙隆,周柯宏,等. 采用慣性傳感器的輸電導線舞動監測系統[J]. 高電壓技術,2014(5):1312-1319.
[4] 邵穎彪. Monitoring Galloping of Transmission Lines Based on Nine-Axis Sensors[J]. Smart Grid,2015,05(01):1-8.
[5] Qian G,Sural S,Gu Y,et al. Similarity between Euclidean and Cosine Angle Distance for Nearest Neighbor Queries:ACM Symposium on Applied Computing[Z]. 20101232-1237.
[6] Sun H,Peng Y,Chen J,et al. A New Similarity Measure Based on Adjusted Euclidean Distance for Memory-Based Collaborative Filtering[J]. Journal of Software,2011,6(6):993-1000.
[7] 楊金顯,李志鵬. MIMU信號下的變形預測[J]. 測繪通報,2015(10):57-59.
[8] Liu J,Deng Z. Self-Tuning Weighted Measurement Fusion Kalman Filter for ARMA Signals with Colored Noise[J]. Applied Mathematics and Information Sciences. 2012,6(1):1-7.
[9] 代金華,張麗杰. 多準則MEMS陀螺隨機誤差在線建模與實時濾波[J]. 傳感技術學報. 2016,29(1):75-79.
[10] Yang P P,Li Q. Kalman Filtering of MEMS Gyro Based on Time-Series Model:International Conference on Electronic Measurement and Instruments[Z]. 20092-367.
[11] Zhao L,Wang C,Min L,et al. Research on FFT and FBG Mechanical Vibration Monitoring System[J]. Applied Mechanics and Materials. 2012,229-231:1332-1337.
[12] Miao Y,Zhong M,Liu Z,et al. Analysis of Wood Vibration Energy Attenuation Based on FFT Vibration Signal[J]. Bioresources,2014,10(1):272-281.
Monitoring Technology of Transmission Line Movement Based on MIMU*
YANG Jinxian1*,WANG Pengfei1,LUO Yufeng1,YANG Chuang1,LI Shuanglei2
(1.School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo He’nan 454003,China;2.State Grid Linqu Shandong power supply company,Shandong,Linqu Shandong 262600,China)
On the base of the transmission line movement monitoring techniques presently,a monitoring technology of transmission line movement base on MIMU is presented. The signals of MIMU are collected and establish ARMA model of MIMU time series and the data signals are processed by Kalman filter;and then treat the sum of squares of each axis specific force and the squares of angular velocity as a standard to measure the amplitude of the transmission line vertical motion and rotation,then the processed data is putted into different segments,through monitoring the euclidean similarity between data segments to measure the the magnitude of the transmission line vertical motion and rotation,motion frequency is obtained by FFT of acceleration and angular velocity data. Three different magnitudes movement of transmission line were simulated by the swings of turntable and the data was collected and processed by the algorithm above. The results show that the estimated vertical motion and rotational amplitude trends are the same as true amplitude. The simulation system can work properly under the laboratory conditions.
MIMU;transmission line;movement monitoring;time-sequence model;Similarity

楊金顯(1980-),男,副教授/博士,碩士生導師,1999年9月至2008年6月畢業于哈爾濱工程大學,分別獲得探測制導與控制技術學士學位、導航制導與控制碩士和博士學位,研究方向為慣性導航及應用,yangjinxian@hpu.edu.cn;

王鵬飛(1993-),男,碩士研究生。主要研究方向為MEMS慣性器件應用,數據處理。
項目來源:國家自然科學基金項目(41672363,U1404510,61440007);河南省科技攻關項目(172102210289);河南省高校基本科研業務費專項資金項目(NSFRF1619);河南省創新型科技人才隊伍建設工程項目(CXTD2016054);河南理工大學杰出青年基金項目(J2017-5)
2016-10-28 修改日期:2017-01-19
O232;TM755;TP212.9
A
1004-1699(2017)05-0795-06
C:7210;7220;7230E
10.3969/j.issn.1004-1699.2017.05.027