基于模型預測控制策略的電動車用無刷直流電機回饋制動的研究
2017-05-16 01:08:11王曉遠
電工技術學報 2017年9期
王曉遠 傅 濤
(天津大學電氣與自動化工程學院 天津 300072)
?
基于模型預測控制策略的電動車用無刷直流電機回饋制動的研究
王曉遠 傅 濤
(天津大學電氣與自動化工程學院 天津 300072)
電動汽車為了延長續駛里程,需要將電動汽車制動時的能量進行回收,而電機的制動效果直接影響著汽車的安全性和舒適性。提出了一種基于模型預測電流控制的恒值電流回饋制動控制策略。首先介紹了無刷直流電機控制系統單管調制的回饋制動原理,推導出了回饋制動的數學模型公式,然后建立了制動電流閉環調節系統,采用模型預測控制策略對回饋制動電流進行調節,控制回饋制動電流和轉矩保持恒定。最后搭建了系統實驗平臺,實驗結果驗證了所提出控制策略的有效性,制動過程中制動電流和制動力矩保持穩定。
無刷直流電機 電動汽車 模型預測電流控制 回饋制動
0 引言
近年來,由于能源危機和環境污染,人們試圖減少對石油的依賴,電動汽車(Electric Vehicle,EV)能實現上述目標并代替傳統車輛,實現車輛能源多樣化。無刷直流電機(Brushless DC Motor,BLDCM)因其良好的起動性能和較高的功率密度,能夠較好地滿足汽車頻繁起動、制動、加速的要求,是理想的電動汽車驅動電機[1-3]。然而電動汽車的動力電池還存在技術瓶頸,限制了電動汽車的續駛里程,使電動汽車的推廣應用受到了制約,如何有效延長電動汽車的駕駛距離成為電動汽車研究的一個重要問題[4,5]。電動汽車在控制可靠的情況下,采用電氣制動將其動能轉換為電能回饋給蓄電池儲存,有效節能和延長車輛的一次充電續航里程,是目前電動汽車技術研究的重要內容之一[6,7]。
目前電動汽車的能量回饋控制方法已經有了很多研究成果。文獻[8-10]利用DC-DC轉換器實現制動能量回饋,但需要額外增加硬件,且降低了系統效率。文獻[11]研究了在無位置傳感器控制方法下進行無刷直流電機的回饋制動,但并未對制動電流進行控制。文獻[12]對電動汽車的無刷直流電機反接制動PWM調制方式進行了詳細研究,并對制動電流進行有效的控制,但反接制動模式并不能進行能量回饋。文獻[13]闡述了雙管調制下的無刷直流電機回饋制動機理,提出了通過控制PWM占空比來防止驅動輪抱死的方案。文獻[14]針對半橋斬波非導通相續流的弊端和全橋斬波存在臨界轉速的缺點,提出了采用全橋斬波和半橋斬波相結合的混合回饋制動控制方法。文獻[15]研究了電動汽車用無刷直流電機的電氣制動方法,所提出的方法實現了電氣制動和能量回饋的雙重目標,但并未進一步深入研究。以上文獻對無刷直流電機回饋制動進行了研究,但未涉及對回饋制動電流的精確控制。
模型預測控制(Model Predictive Control, MPC)是近年來興起的控制算法,隨著數字處理器的快速發展,其在電機控制系統中得到應用[16,17]。模型預測電流控制是模型預測控制的一個分支,具有易于理解、被控電流動態性能好、魯棒性強等優點。該控制方法通過建立被控系統的離散時域數學模型,對系統下個釆樣周期的電流值進行預測,建立電流偏差的目標函數進行滾動優化,選取最優控制量輸出,達到對電流的準確控制[18,19]。
本文以回饋制動狀態的無刷直流電機控制系統作為研究對象,為了提高回饋制動的安全性和汽車的舒適性,采用模型預測電流控制策略對回饋制動電流進行恒值電流控制,精確控制制動電流,得到了較好的控制性能。最后進行了實驗,實驗結果證明了所提出控制策略的有效性,實現了對回饋制動電流和力矩的有效控制。
1 無刷直流電機的回饋制動分析
1.1 回饋制動電路分析
無刷直流電機處于回饋制動和電動狀態的拓撲結構相同。根據電機控制原理,改變同一磁極下的定子電流的方向,則電機輸出轉矩方向發生改變。通過改變三相逆變器功率器件的導通順序,就可以改變電機的輸出電流方向,達到制動的目的。
電機工作在電動狀態和回饋制動狀態時霍爾信號與開通功率器件的對應關系如圖1所示。圖1中,H1、H2、H3為電機的三個霍爾傳感器信號,VT1~VT6為驅動電機的6個功率開關管。在電動工作模式下,上橋臂功率器件進行PWM調制,下橋臂功率器件導通。而當電機采用半橋調制制動方式時,只有下橋臂的三個功率器件在120°電角度進行PWM調制,上橋臂三個功率器件總是在關閉狀態。
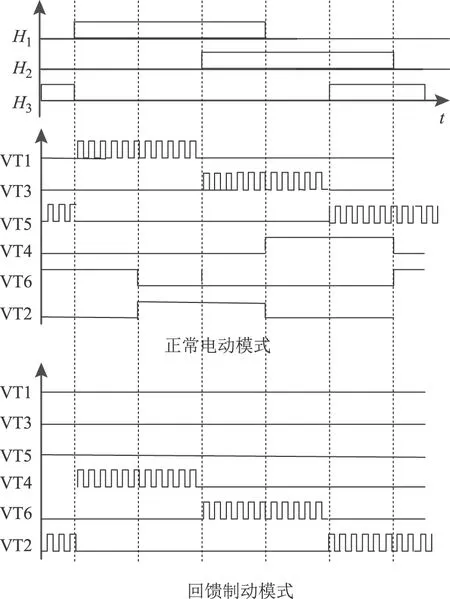
圖1 電動工作模式和回饋制動模式下的霍爾位置與功率器件信號Fig.1 Hall signal and power device signals in working mode and regenerative braking mode
電機在電動工作模式和回饋制動模式時的功率器件開關狀態見表1。根據霍爾開關狀態的信息,電機運行有101、100、110、010、011、001共6種狀態。電機運行處于回饋制動模式時,在同樣的霍爾狀態下,通過控制開關管的開關狀態,使得定子電流方向相對于電動工作模式時相反,從而使得電機產生制動效果。采用回饋制動,無需對驅動系統主電路結構作硬件變動,只需修改軟件,這也是該制動方法的一個顯著優點。
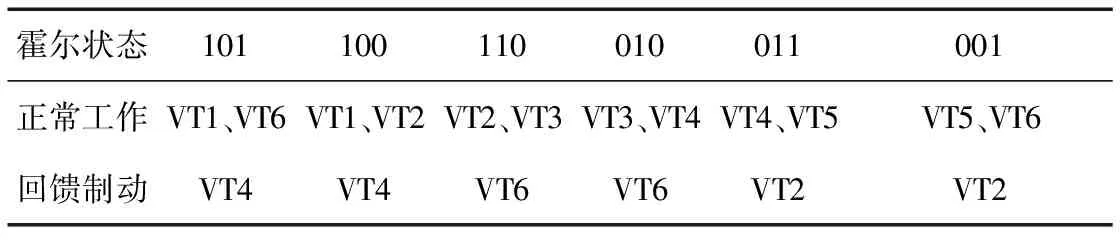
表1 霍爾開關狀態和功率器件的對應關系
1.2 回饋制動過程分析
無刷直流電機的單開關管回饋制動中,只有一個開關管進行PWM調制,電機的電壓方程也均相同。因此,只需分析電機在某一個60°電角度區間內的回饋制動原理。本文假定VT4進行PWM控制,電機回饋制動過程中的電流如圖2所示。
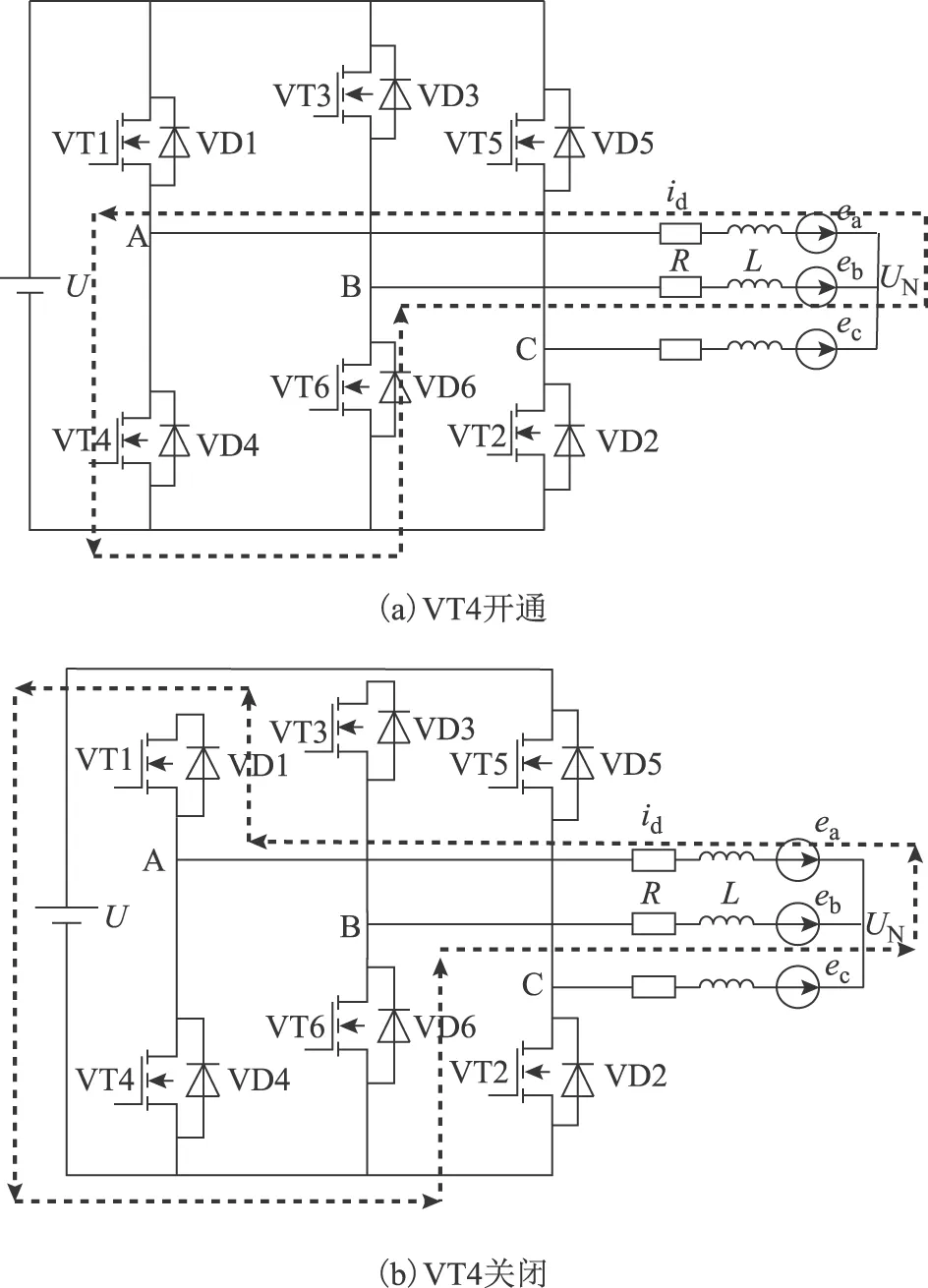
圖2 回饋制動時的電流流向Fig.2 The current flow during regenerating braking
當VT4處于開通狀態時,電流如圖2a中方向流動。該電流方向與電機電動工作模式時相反,電磁力矩產生制動作用。此時,反電動勢產生的電能一部分消耗在回路的電阻中,其余全部變成磁場能儲存于回路繞組電感中。忽略VT4、VD6的管壓降,此時繞組回路的電壓方程為
(1)
式中,R為電機三相繞組電阻;L為三相繞組電感;iA、iB、iC為三相繞組電流;eA、eB、eC為三相反電動勢;UN為電機中性點電壓。
由式(1)可得
(2)
因為iA=-iB且iA=-id,eA=-eB=E,可得
(3)
假設開始電流大小為I10,如圖3所示,電流處于ton階段,此過程制動電流為
(4)
電機繞組的電感電壓為
(5)
此過程中,儲存在A、B兩相繞組電感中的磁場能量為
(6)
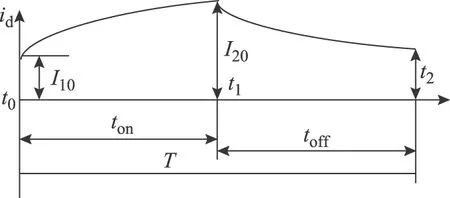
圖3 一個PWM周期內的回饋制動電流波形Fig.3 Current waveform of regenerative braking during one PWM perieod
當VT4處于關閉狀態時,電機繞組電流不能突變,電流如圖2b所示方向流動,該電流方向仍與電動時相反,故電磁力矩仍然對電機有制動作用。此時反電動勢產生的電能和VT4閉合期間儲存于回路電感的磁場能,除部分變成回路的電阻熱外,其余的能量將以電能的形式給蓄電池充電。忽略VD1、VD6的管壓降,電壓方程為
(7)
由式(7)可得
(8)
式中,U為電源電壓。因為iA=-iB且iA=-id,eA=-eB=E,可得
(9)
假定初始電流為I20,此過程制動電流為
(10)
蓄電池充電的端電壓為
(11)
此過程中,蓄電池吸收的能量為
(12)
在每個PWM周期T內,電機相電流隨功率管開關而波動。根據狀態空間平均法,由式(4)和式(10)可得穩態時電機繞組的平均制動電流為
(13)
同時可以得到電機繞組回饋到蓄電池的電流為
(14)
通過式(14)可以看出,當α=1-E/U時,回饋到蓄電池的電流為最大值。在α=1-E/U兩側,隨著α數值增大,回饋到蓄電池上的電流變小。
由式(13)可以看出,電機的相電阻與電源電壓為固定值,平均制動電流只與電機的反電動勢和占空比有關。而電機的反電動勢和轉速呈正比,且在制動過程中為下降趨勢,處于不可控狀態。只要控制開關管的占空比,就可以控制電機的制動電流和制動轉矩。
為驗證占空比與回饋電流的關系,本文對無刷直流電機回饋制動進行了固定占空比情況下的實驗,電機轉速在3 000r/min時進行回饋制動。圖4給出了回饋制動占空比分別為85%、90%、95%情況下相電流和轉速的波形。
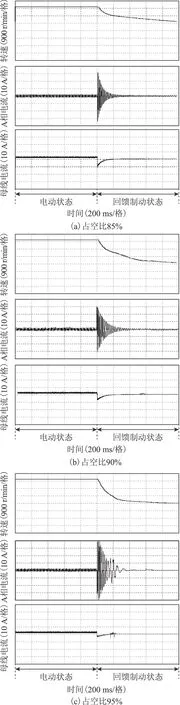
圖4 不同PWM占空比下的回饋制動波形Fig.4 Waveforms in regenerative brake with different PWM duty ratio
根據圖4中的實驗結果,得到不同轉速下占空比與制動電流之間的關系,如圖5所示。根據以上實驗結果,可以總結出如下結論:
1)相同轉速時,回饋制動的PWM占空比越大,回饋制動電流越大,回饋制動的效果越明顯,電機轉速下降的時間越快。
2)相同PWM占空比時,轉速越大,回饋制動電流越大,制動效果越明顯。當轉速下降到一定程度,產生的制動電流很小,制動效果非常微弱。 所以實際系統中需要確定一個制動臨界轉速,低于臨界轉速電機應采取其他制動方式。
3)在相同轉速下進行回饋制動,PWM占空比分別為85%、90%、95% 時,電機轉速從3 000r/min下降到1 000r/min的制動時間分別為1s、0.4s、0.2s。回饋到蓄電池的電流與占空比是反向的關系,蓄電池回收的能量分別為800J、600J、400J。通過以上分析可以看出,回饋能量與占空比呈反比例關系。
4)反電動勢的方向決定了轉矩的方向,采用這種控制方式產生的轉矩為制動性質,電機在這種情況下不可能反轉,適合電動汽車工況。
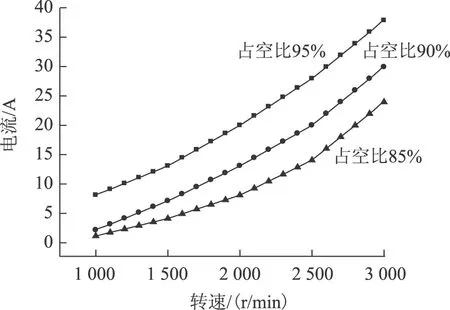
圖5 PWM占空比與制動電流的關系Fig.5 Relationship of PWM duty ratio and braking current
2 采用模型預測電流控制策略的恒值電流回饋制動
在實際應用中,電動汽車根據制動踏板的力矩指令產生給定的制動轉矩。為了精確控制制動電流,控制系統采用了模型預測電流控制策略,對回饋制動過程中的電流進行調節,使得產生的制動轉矩能準確地跟隨制動踏板的力矩指令。采用模型預測電流控制策略的電機回饋制動框圖如圖6所示。離散化數學模型預測出制動電流第k+1次釆樣周期預測值,建立給定電流與預測電流偏差的目標函數,滾動優化,選取使目標函數最優的電壓,將與此最優電壓相對應的開關狀態在下一釆樣周期輸出。
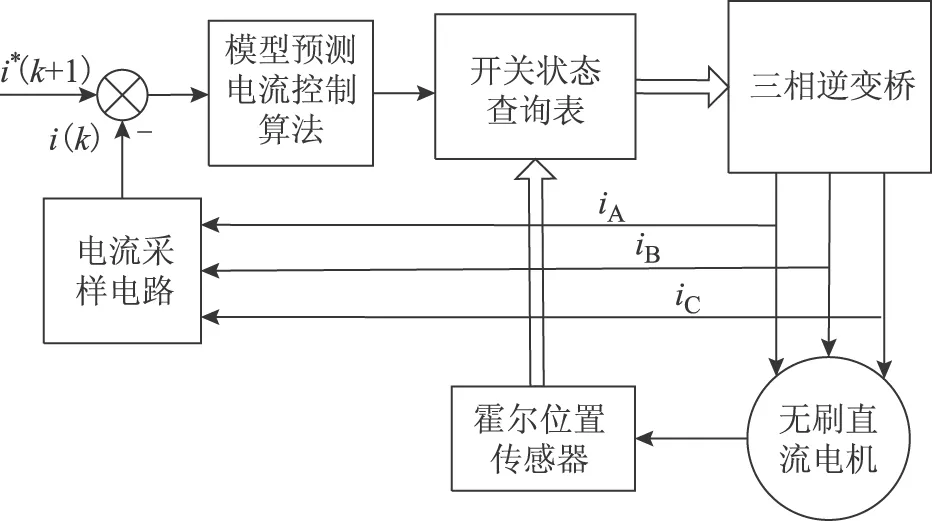
圖6 采用模型預測電流控制的無刷直流電機回饋制動Fig.6 BLDCM regenerative braking using model predictive current control method
將式(13)進行離散化,可得到k時刻的制動電流的預測值為
(15)
式中,U(k)為當前的相電壓;E(k)為當前相反電動勢;α(k)為調制相的PWM占空比。
由于內部預測本身的誤差,導致電機預測模型的輸出與本體模型的輸出不完全一致,因此需要對其在線修正。設k時刻無刷直流電機系統的實際制動電流與預測模型電流的誤差為
e(k)=i(k)-iave(k)
(16)
利用此誤差對預測模型進行反饋校正,使預測的模型更接近于實際的系統模型,校正后的輸出為
ip(k+1)=iave(k+1)-he(k)
(17)
式中,h為誤差修正系數。
滾動優化的目的是評估所選定結果對應電流預測值的優劣,從中選取最優結果使實際電流跟蹤給定電流。控制目標是使制動電流盡可能保持恒定,選擇輸出預測誤差和控制量加權的二次性能指標來進行最優控制,其性能指標表達式為
J=p[ip(k+1)-iave(k+1)]2+q[α(k)U(k)]2
(18)
式中,p和q分別為預測誤差和控制量的加權系數。
通過滾動優化可以使跟蹤誤差和控制量均達到最優,從而取得較好的控制效果。
3 實驗結果與分析
為了驗證所提出算法的有效性及性能,本文搭建的實驗系統結構框圖如圖7所示。控制芯片為TI公司的數字信號處理器TMS320F28035,開關頻率設置為20kHz。制動控制系統中無刷直流電機的參數為:額定電壓為 300V,額定轉速為3 000r/min,定子電阻為0.26Ω,定子電感為2.5mH。實驗系統的照片如圖8所示。
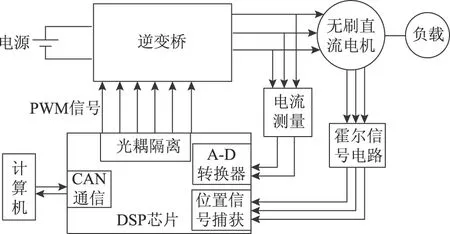
圖7 實驗系統結構框圖Fig.7 Diagram of experimental system structure
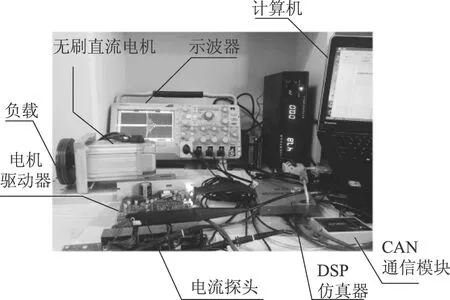
圖8 控制系統實驗平臺Fig.8 Experimental control system plat
為驗證所提出的算法的效果,本文分別采用傳統PID控制算法和模型預測電流控制算法對無刷直流電機回饋制動電流進行控制。實驗時采用了恒值電流回饋制動控制策略,無刷直流電機制動初始轉速為3 000r/min,在此轉速時開始回饋制動,轉速低于1 000r/min時采取機械制動。
制動電流參考值分別設置為10A、15A,兩種情況下制動過程的轉速、相電流、母線電流的波形如圖9、圖10所示。可以看出,采用PID控制算法與模型預測電流控制算法時,回饋制動過程中的轉速和母線電流波形比較接近,電機轉速從3000r/min下降到1 000r/min的時間分別為0.4s、0.3s,回饋制動系統回收的能量分別為800J、600J。
采用恒值電流回饋控制策略時,回饋制動電流在電機轉速下降到中低轉速前一直保持在參考電流值附近。但比較相電流波形,采用PID控制算法的回饋制動電流幅值雖然保持在參考電流值附近,但波動較大,跟隨性較差,說明PID控制算法有較大的局限性。而采用參考模型預測電流控制算法時回饋制動電流幅值與參考電流值相差較小,制動電流波動較小,跟隨性較好。
由此可以證明,采用參考模型預測電流控制算法對回饋制動電流具有更好的控制精度,制動電流跟隨踏板指令精確控制,增加了制動的安全性和汽車的舒適性。驗證了所提出的控制策略的有效性,為合理利用汽車能量以延長電動汽車的續駛里程提供了有效途徑。
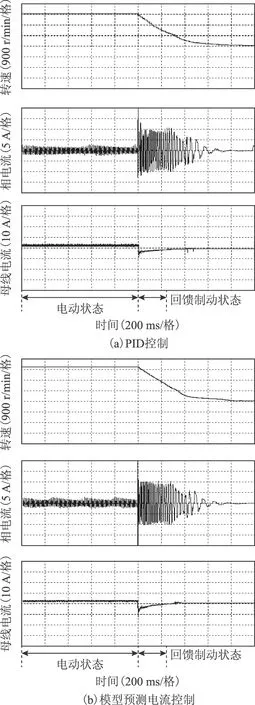
圖9 制動電流參考值為10 A的回饋制動波形Fig.9 The experimental waveform with reference brake current 10 A
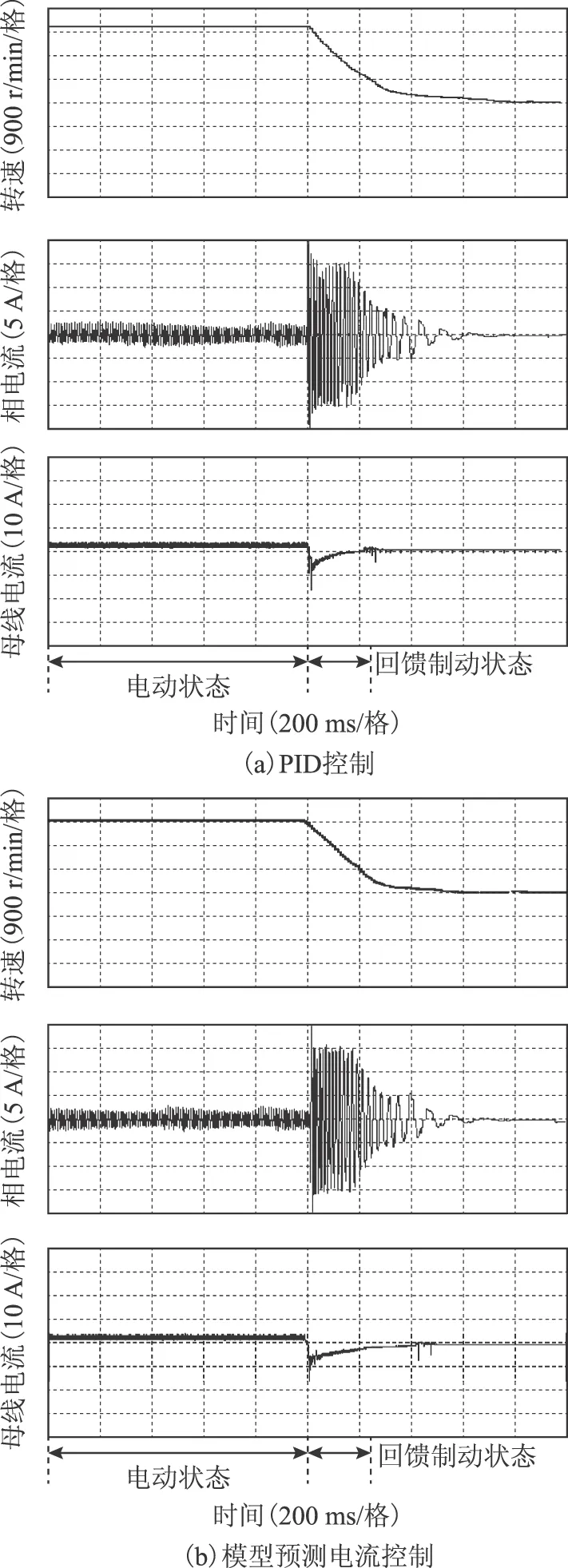
圖10 制動電流參考值為15 A的回饋制動波形Fig.10 The experimental waveform with reference brake current 15 A
4 結論
電動汽車需要在制動或減速時進行回饋制動以增強續駛里程。本文針對制動或減速時電動汽車用無刷直流電機控制系統,在不增加硬件的條件下,采用了基于模型預測電流控制策略的恒值電流回饋制動方式,研究了半橋調制回饋制動方式。制動過程中采用所提出的模型預測電流控制策略,精確控制制動電流,回饋制動電流與制動力矩能夠較好地跟隨給定值。采用本文方法實現了電動汽車制動和能量回饋的雙重目標,該方法為進一步延長電動汽車的續駛里程、提高制動安全性和汽車的舒適性提供了一定的理論基礎。
[1] 黃明明, 郭新軍, 周成虎, 等. 一種新型電動汽車寬調速驅動系統設計[J]. 電工技術學報, 2013, 28(4): 228-233.HuangMingming,GuoXinjun,ZhouChenghu,etal.Anovelwidespeed-rangedrivingsystemdesignforelectricvehicle[J].TransactionsofChinaElectrotechnicalSociety, 2013, 28(4): 228-233.
[2] 陳健, 于慎波. 一種減小無刷直流電動機噪聲的PWM調制方法[J]. 電工技術學報, 2016, 31(9):129-136.ChenJian,YuShenbo.APWMmodulationmethodtodecreasenoiseofbrushlessDCmotors[J].TransactionsofChinaElectrotechnicalSociety, 2016, 31(9): 129-136.
[3] 鄭萍, 王勃, 吳帆, 等. 電動汽車用雙三相永磁同步電機飽和電感特性分析及計算方法[J]. 電工技術學報, 2013, 28(7): 19-25.ZhengPing,WangBo,WuFan,etal.Analysisandcalculationgmethodofsatuatedinductanceofadual-threephasepermanent-magnetsynchronousmachineforelectricvehicles[J].TransactionsofChinaElectrotechnicalSociety, 2013, 28(7): 19-25.
[4] 李寧, 程明, 韓鵬. 電動汽車用新型雙定子無刷雙饋電機轉子磁鏈定向控制[J]. 電工技術學報, 2014, 29(增刊1): 115-123.LiNing,ChengMing,HanPeng.Rotorfluxorientedcontrolofanewdual-statorbrushlessdoubly-fedmotorforEV/HEVapplications[J].TransactionsofChinaElectrotechnicalSociety, 2014, 29(S1):115-123.
[5] 王曉遠, 高鵬, 趙玉雙. 電動汽車用高功率密度電機關鍵技術[J]. 電工技術學報, 2015, 30(6): 53-59.WangXiaoyuan,GaoPeng,ZhaoYushuang.Keytechnologyofhighpowerdensitymotorsinelectricvehicles[J].TransactionsofChinaElectrotechnicalSociety, 2015, 30(6): 53-59.
[6] 胥良, 宋立偉, 李子健, 等. 節能型能量回饋式電動車用電機對拖試驗系統[J]. 電工技術學報, 2007, 22(8): 161-165.XuLiang,SongLiwei,LiZijian,etal.Savingenergyandenergy-feedbackexperimentalsystemforelectricalvehiclemotor[J].TransactionsofChinaElectrotechnicalSociety, 2007, 22(8):161-165.
[7] 王猛, 孫澤昌, 卓桂榮, 等. 電動汽車制動能量回收最大化影響因素分析[J]. 同濟大學學報, 2012, 40(4): 583-588.WangMeng,SunZechang,ZhuoGuirong,etal.Maxinumbrakingenergyrecoveryofelectricvehiclesanditsinfluencingfactors[J].JournalofTongjiUniversity(NaturalScience), 2012, 40(4): 583-588.
[8]MorenoJ,OrtúzarME,DixonLW.Energymanagementsystemforahybridelectricvehicle,usingultracapacitorsandneuralnetworks[J].IEEETransactionsonIndustrialElectronics, 2006, 53(2): 614-623.
[9]WuHongxing,ChengShukang,CuiShumei.AcontrollerofbrushlessDCmotorforelectricvehicle[J].IEEETransactionsonMagnetics, 2005, 41(1): 509-513.
[10]MarchesoniM,VaccaC.NewDC-DCconverterforenergystoragesysteminterfacinginfuelcellhybridelectricvehicles[J].IEEETransactionsonPowerElectronics, 2007, 22(1): 301-308.
[11]ChiWenchun,ChengMingyang,ChenChenghu.Position-sensorlessmethodforelectricbrakingcommutationofbrushlessDCmachines[J].IETElectricPowerApplications, 2013, 7(9): 701-713.
[12]胡慶波, 鄭繼文, 呂征宇. 混合動力中無刷直流電機反接制動PWM調制方式的研究[J]. 中國電機工程學報, 2007, 27(30): 87-91.HuQingbo,ZhengJiwen,LüZhengyu.StudyonPWMstrategyforbrakingofbrushlessDCmotorinhybridelectricvehicle[J].ProceedingsoftheCSEE, 2007, 27(30): 87-91.
[13]趙國柱, 魏民祥. 無刷直流電機電動汽車再生ABS雙閉環控制研究[J]. 汽車工程, 2013, 35(4): 307-311.ZhaoGuozhu,WeiMinxiang.Aresearchonthedouble-closed-loopcontrolforregenerativeantilockbrakingsysteminanelectricvehicledrivenbybrushlessDCmotor[J].AutomotiveEngineering, 2013, 35(4):307-311.
[14]宋哲, 王友仁, 魯世紅,等. 一種電動車用無刷直流電機混合回饋制動控制方法[J]. 電工技術學報, 2016, 31(6):74-80.SongZhe,WangYouren,LuShihong,etal.AhybridregenerativebrakingcontrolmethodofbrushlessDCmotorforelectricvehicles[J].TransactionsofChinaElectrotechnicalSociety, 2016, 31(6):74-80.
[15]YangMJ,JhouHL,MaBY,etal.Acost-effectivemethodofelectricbrakewithenergyregenerationforelectricvehicles[J].IEEETransactionsonIndustrialInformatics, 2009, 56(6): 2203-2212.
[16]沈坤, 章兢, 王玲, 等. 三相電壓型逆變器模型預測控制[J]. 電工技術學報, 2013, 28(12): 283-289.ShenKun,ZhangJing,WangLing,etal.Modelpredictivecontrolofthree-phasevoltagesourceinverter[J].TransactionsofChinaElectrotechnicalSociety, 2013, 28(12): 283-289.
[17]鄭澤東, 王奎, 李永東, 等. 采用模型預測控制的交流電機電流控制器[J]. 電工技術學報, 2013, 28(11): 118-123.ZhengZedong,WangKui,LiYongdong,etal.CurrentcontrollerforACmotorsusingmodelpredictivecontrol[J].TransactionsofChinaElectrotechnicalSociety, 2013, 28(11): 118-123.
[18]曹曉冬, 譚國俊, 王從剛, 等. 三電平PWM整流器多模型預測控制方法[J]. 電工技術學報, 2014, 29(8): 142-150.CaoXiaodong,TanGuojun,WangConggang,etal.Researchonmulti-modelpredictivecontrolstrategyofthree-levelPWMrectifier[J].TransactionsofChinaElectrotechnicalSociety, 2014, 29(8):142-150.
[19]王從剛, 何鳳有, 曹曉冬. 三相電壓型PWM整流器有限開關序列模型預測電流控制[J]. 電工技術學報, 2013, 28(12): 182-190.WangConggang,HeFengyou,CaoXiaodong.Finiteswitchingsequencemodelpredictivecurrentcontrolofatheree-phasevoltagesourcePWMrectifier[J].TransactionsofChinaElectrotechnicalSociety, 2013, 28(12):182-190.
(編輯 于玲玲)
Constant Current Regenerative Brake in BLDCM for Electric Vehicle Based on Model Predictive Current Control Strategy
WangXiaoyuanFuTao
(School of Electrical and Automation Engineering Tianjin University Tianjin 300072 China)
Electric vehicles (EV) is supplied with the battery. To extend the driving range of EV, braking and deceleration energy should be fully utilized. In order to improve the braking safety and comfort of EV, constant current regenerative braking control strategy based on model predictive current control strategy is proposed in this paper. Brushless DC Motor (BLDCM) regenerative braking principle under single modulation is described. The mathematical model of regenerative braking is established. The closed-loop control system of braking current is established. Regenerative braking current is controlled with model predictive current control strategy. Regenerative braking current and torque is kept to be constant. The effectiveness of the proposed method is verified by experimental results. The brake current and torque are stable during braking.
Brushless DC motor(BLDCM), electric vehicle(EV), model predictive current control, regenerative braking
國家自然科學基金項目資助(51577125)。
2016-03-15 改稿日期2016-08-25
TM351
王曉遠 男,1962年生,教授,博士生導師,研究方向為電動車用電機設計及其控制。
E-mail:xywang62@tju.edu.cn(通信作者)
傅 濤 男,1979年生,博士研究生,研究方向為永磁電機及其控制。
E-mail:futao838@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03