無位置傳感器的無刷直流電動機(jī)閉環(huán)起動方法
2017-05-15 01:51:47張青鵬戴光宇
微特電機(jī) 2017年10期
關(guān)鍵詞:檢測
謝 然,卞 敬,張青鵬,戴光宇
(天津市特種設(shè)備監(jiān)督檢驗技術(shù)研究院,天津300192)
0 引 言
在無位置傳感器的無刷直流電機(jī)起動過程中,懸空相的反電動勢與電機(jī)轉(zhuǎn)速成正比,因起動初期電機(jī)轉(zhuǎn)速過低,因此懸空相的反電動勢很小,造成反電動勢的過零點不易測得,從而無法準(zhǔn)確獲得轉(zhuǎn)子的位置信息[1]。但本文經(jīng)實驗發(fā)現(xiàn),無刷直流電機(jī)的定子三相繞組在空間上構(gòu)成耦合回路,針對三相六狀態(tài)二二導(dǎo)通的控制方式,通電兩相電流會在懸空相產(chǎn)生感應(yīng)電壓[2-3]。經(jīng)理論分析和推導(dǎo),可發(fā)現(xiàn)當(dāng)選用Hpwm_Lpwm控制方式驅(qū)動電機(jī)時,通電兩相懸空相的感應(yīng)電壓與反電動勢過零點一致,但在PWM(ON)時(即功率管導(dǎo)通時)兩者的過零點方向相反,而在PWM(OFF)時(即功率管關(guān)斷續(xù)流時)兩者的過零點方向相同。由于在電機(jī)起動過程中,起動電流較大,因此其所產(chǎn)生的懸空相感應(yīng)電壓比較明顯,此時的懸空相感應(yīng)電壓遠(yuǎn)遠(yuǎn)大于懸空相的反電動勢。
借助于這一原理,在無位置傳感器的無刷直流電機(jī)起動過程中,可利用檢測懸空相的感應(yīng)電壓過零點代替懸空相反電動勢過零點的方法,準(zhǔn)確獲得轉(zhuǎn)子位置信息。這種方法彌補(bǔ)了起動階段反電動勢不易檢測的缺點,解決了傳統(tǒng)無感無刷直流電機(jī)起動過程中轉(zhuǎn)子位置信息難以獲取,無法實現(xiàn)轉(zhuǎn)子位置實時反饋的閉環(huán)起動問題。
1 無刷直流電機(jī)瞬態(tài)模型
由無刷直流電機(jī)的磁鏈方程[4]可知:

式中:Uk為相電壓;R為定子繞組相電阻;Vn為中性點電壓;ψk為定子k相繞組磁鏈。
定子的三相繞組的磁鏈[5]分別:
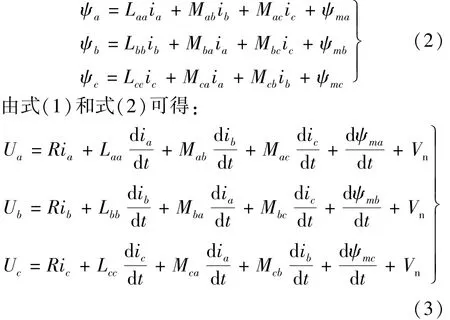
式中:Laa,Lbb,Lcc分別為A,B,C三相定子繞組的自感系數(shù);Mab,Mac,Mba,Mbc,Mca,Mcb為三相定子繞組的互感系數(shù),且有Mab=Mba,Mbc=Mcb,Mca=Mac;ψma,ψmb,ψmc取決于轉(zhuǎn)子的位置θ,這三者的變化產(chǎn)生了無刷直流電機(jī)的反電動勢[6],即:

可得無刷直流電機(jī)反電動勢波形如圖1所示。

圖1 無刷直流電機(jī)的反電動勢波形
通電相在懸空相的感應(yīng)電壓是由通電相的電流、懸空相與通電相的互感系數(shù)決定的[7],結(jié)合式(3)中所敘述的無刷直流電機(jī)數(shù)學(xué)模型,可知各相的感應(yīng)電壓分別:

此時電機(jī)的數(shù)學(xué)模型方程:

以B,C兩相通電,電流由B相流入C相,A相懸空為例,可知ia=0,ib=-ic,此時的電機(jī)瞬態(tài)模型:

2 通電兩相在懸空相的感應(yīng)電壓與懸空相反電動勢關(guān)系
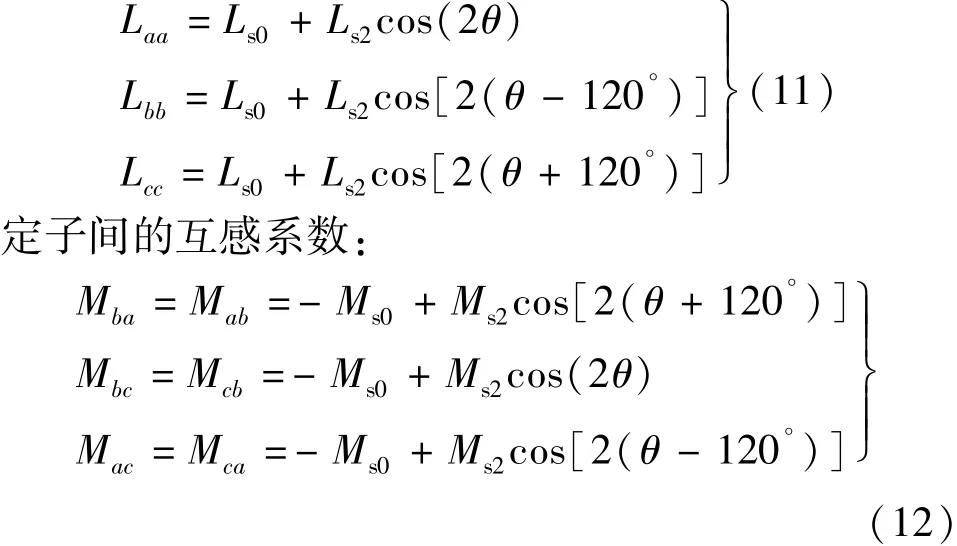
由文獻(xiàn)[8]可知,定子的自感系數(shù)和互感系數(shù)與轉(zhuǎn)子位置角度存在函數(shù)關(guān)系。自感系數(shù)與轉(zhuǎn)子位置角度的函數(shù)關(guān)系:
當(dāng)采用二二導(dǎo)通方式驅(qū)動電機(jī)時,以電機(jī)順時針運行為例,結(jié)合圖2可知,轉(zhuǎn)子角度變化范圍為-π/6~π/6,從圖2中可看出,此時電流由B相流入C
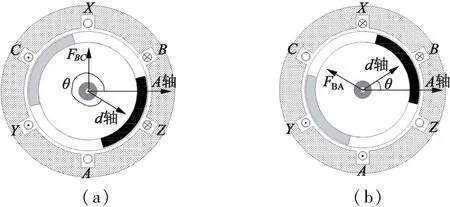
圖2 BC相導(dǎo)通始末位置狀態(tài)圖
相,A相為懸空相,可知:

由圖2(a)中電機(jī)運行狀態(tài)可知,此時A相的感應(yīng)電壓是由導(dǎo)通相電流引起,即ib與ic對A相的作用,則:可得轉(zhuǎn)子在各運行期間懸空相感應(yīng)電壓表達(dá)式,如表1所示(
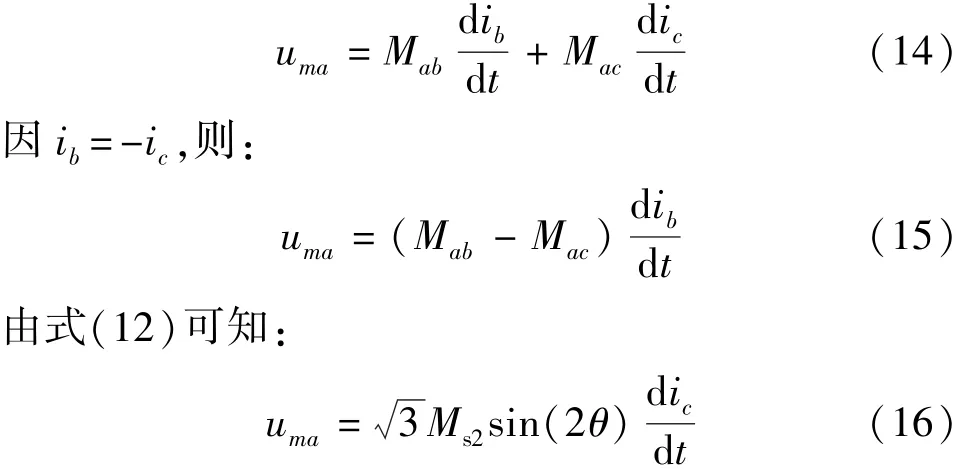
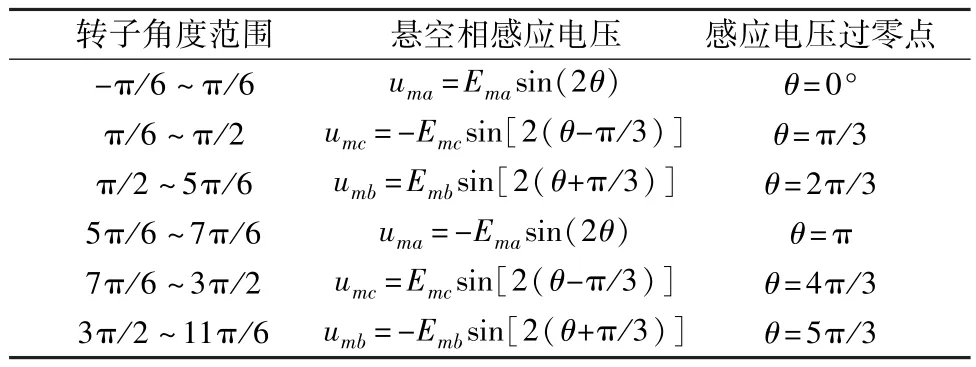
表1 懸空相感應(yīng)電壓方程及其過零點
由式(5)、式(6)和式(7)可得懸空相反電動勢在轉(zhuǎn)子各角度范圍內(nèi)的過零點,如表2所示。

表2 懸空相反電動勢方程及其過零點
當(dāng)功率管導(dǎo)通時,即PWM(ON)階段,電機(jī)在起動過程中,電流的變化趨勢為逐漸變大,其變化率為正值()。 由表1和表2中的信息可知,定子懸空相的感應(yīng)電壓和反電動勢的過零點相同。兩者的過零點方向如表3所示。

表3 功率管導(dǎo)通時懸空相感應(yīng)電壓與反電動勢過零點方向
當(dāng)功率管續(xù)流時,即PWM(OFF)階段,電機(jī)通電相斷開,此時電流值逐漸減小(),此時定子懸空相的感應(yīng)電壓和反電動勢的過零點方向,如表4所示。
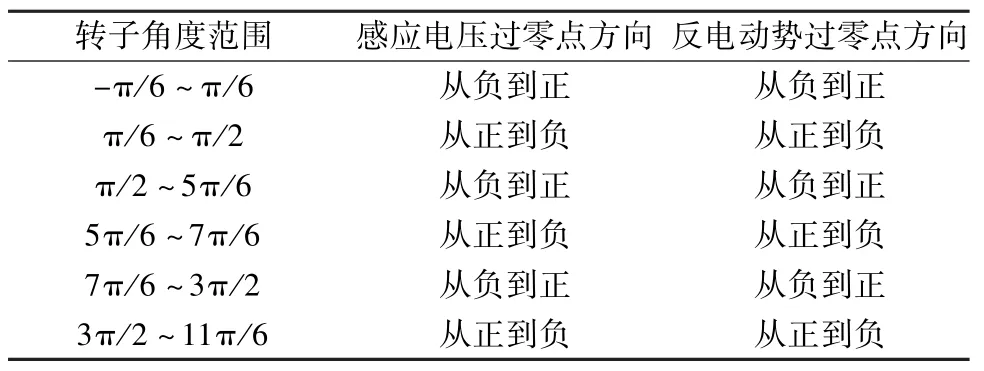
表4 功率管關(guān)斷續(xù)流時懸空相感應(yīng)電壓與反電動勢過零點方向
由上述分析可知,定子懸空相的感應(yīng)電壓和反電動勢的過零點相同。但當(dāng)功率管導(dǎo)通時,兩者的過零點方向相反;當(dāng)功率管關(guān)斷續(xù)流時,兩者的過零點方向相同。
本文利用MATLAB的Simulink將上述函數(shù)關(guān)系式進(jìn)行仿真。以功率管續(xù)流時PWM(OFF)為例,為簡化分析,令Emk,E為一定值,且數(shù)量級基本相等。可得懸空相感應(yīng)電壓和反電動勢波形如圖3所示(功率管續(xù)流時,懸空相感應(yīng)電壓與此時相反)。

圖3 懸空相感應(yīng)電壓與反電動勢波形
當(dāng)采用PWM(ON)時對懸空相過零點進(jìn)行檢測,懸空相的感應(yīng)電壓和反電動勢過零點方向相反,當(dāng)轉(zhuǎn)速較低時,因懸空相的感應(yīng)電壓遠(yuǎn)遠(yuǎn)大于懸空相反電動勢,此時不會對過零點造成太大影響;但隨轉(zhuǎn)速逐漸升高,懸空相的感應(yīng)電壓和反電動勢電壓數(shù)量級達(dá)到基本相同時,會造成多個過零點現(xiàn)象,影響對過零點的檢測。多個過零點時的仿真圖形如圖4所示。當(dāng)采用PWM(OFF)時,對懸空相過零點進(jìn)行檢測,懸空相的感應(yīng)電壓和反電動勢過零點方向相同,不會造成多個過零點現(xiàn)象,其仿真圖形如圖5所示。

圖4 功率管導(dǎo)通時,懸空相感應(yīng)電壓與反電動勢疊加圖形
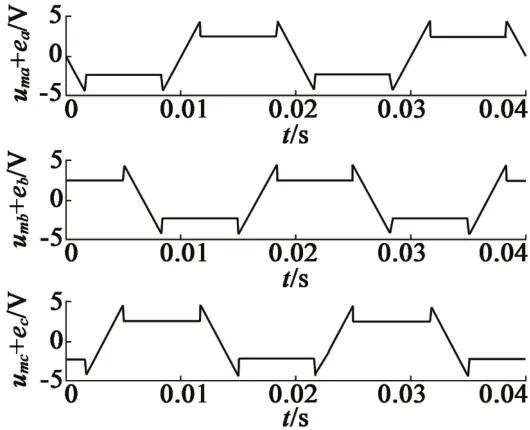
圖5 功率管關(guān)斷續(xù)流時,懸空相感應(yīng)電壓與反電動勢疊加圖形
采用PWM(OFF)時對懸空相過零點檢測,若電機(jī)達(dá)到指定轉(zhuǎn)速,轉(zhuǎn)速變化平穩(wěn),則電流變化率減小,懸空相感應(yīng)電壓逐漸變?yōu)?,懸空相的過零點主要為反電動勢的過零點,在此時可切換為反電動勢檢測法控制電機(jī)運行;同時在PWM(OFF)階段的懸空相感應(yīng)電壓過零點檢測方法,可實現(xiàn)電機(jī)低轉(zhuǎn)速的過零檢測,因此選用在功率管關(guān)斷續(xù)流階段,即PWM(OFF)時對定子懸空相的感應(yīng)電壓的過零點進(jìn)行檢測,可實現(xiàn)電機(jī)的起動。
3 懸空相感應(yīng)電壓測量法對中性點電壓的影響
本文選定Hpwm_Lpwm的控制方式作為電機(jī)控制方法。采用該方式時,電機(jī)的中性點電位穩(wěn)定;在電機(jī)換相過程中,懸空相無電流續(xù)流過程;在功率管開關(guān)瞬態(tài)時,不存在諧振現(xiàn)象。所以采用該控制方法不會造成因諧振而引起得電機(jī)反電動勢過零點偏移問題,同時該控制方法有利于對電機(jī)懸空相反電動勢的檢測,能夠更加準(zhǔn)確地確定轉(zhuǎn)子位置信息[9-10]。根據(jù)分析,在起動階段,選擇在 PWM(OFF)階段對懸空相電壓做檢測,此時中性點電壓Vn=Ud/2,若檢測出懸空相電壓為Ud/2,則表明懸空相的反電動勢過零點。但在實際中,因功率管壓降存在差異,電機(jī)的繞組電感不能完全對稱,都會造成中性點電壓的偏移。而中性點電壓的偏移會造成懸空相電壓過零點超前或滯后,從而導(dǎo)致電機(jī)換相過早或者過晚,降低了起動轉(zhuǎn)矩,影響了起動性能,有時甚至導(dǎo)致電機(jī)無法起動。
以A相懸空,BC相導(dǎo)通為例,此時懸空相A相電流為零,BC相電流經(jīng)續(xù)流二極管續(xù)流(即ia=0,ib=-ic,ib>0),可得此時的電機(jī)模型:

由上式可以看出,由于飽和效應(yīng)引起的電感值隨轉(zhuǎn)子位置變化造成的中性點電壓偏移,僅是在數(shù)值上按倍數(shù)增大,并沒有造成過零點的超前或滯后問題。同樣可以采用檢測懸空相端電壓與Ud/2比較,確定過零點,因此通過對懸空相端電壓的過零點做出檢測來確定換相點的方法是可行的。
4 起動方法的提出與優(yōu)化
根據(jù)上述分析結(jié)果,在電機(jī)起動階段利用檢測懸空相感應(yīng)電壓過零點代替反電動勢過零點的檢測方法可行,并可通過對電機(jī)運行時的懸空相端電壓檢測過零點實現(xiàn)起動階段的電機(jī)換相。在起動階段,懸空相反電動勢幾乎為零,反電動勢影響可忽略不計。由懸空相電壓公式可得懸空相電壓幅值:

可知,懸空相電壓的幅值大小與電機(jī)的自感和互感系數(shù)的二次諧波分量幅值Ls2,Ms2所施加直流電壓大小Ud以及通電相電流變化速率的絕對值有關(guān)。
實際測量中,在起動階段初期,懸空相電壓的幅值并非很大,同時由于過零檢測電路靈敏度的限制,易造成過零點難以檢測,因此需要提高起動階段的懸空相電壓幅值大小。但Ls2,Ms2為定值,Ud需要和電機(jī)的實際電壓參數(shù)匹配,因此只有通過改變電流變化速率達(dá)到提高懸空相感應(yīng)電壓幅值的目的。
在功率管關(guān)斷續(xù)流過程中,設(shè)定子電流的初始值為i0,定子繞組的電感值為L,定子繞組的電阻值為R,那么續(xù)流階段定子繞組電流值[11]可表示:
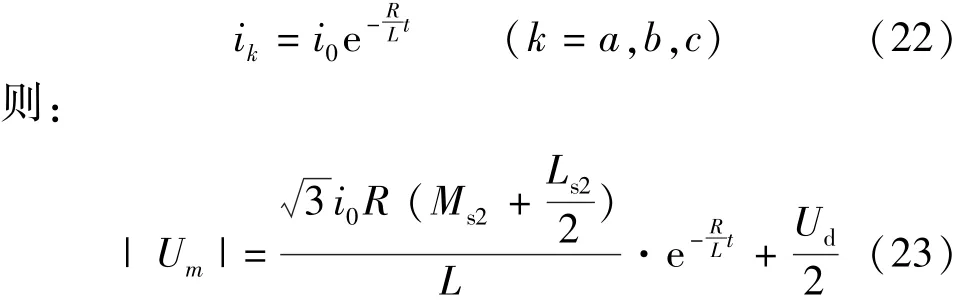
因此,從式(23)可看出,通過減小電機(jī)繞組的時間常數(shù),可實現(xiàn)變快續(xù)流階段的電流下降速度,即電流變化速率變大,從而使得懸空相電壓幅值增大。但電機(jī)繞組的電感不能改變,可通過改變電阻值實現(xiàn)對電機(jī)時間常數(shù)的調(diào)整,即可外接起動電阻,并與電機(jī)的三相定子繞組串聯(lián)實現(xiàn)減小電機(jī)時間常數(shù)。該起動電阻的阻值大小應(yīng)該與電機(jī)定子繞組的相電阻相等。這樣就可增大電流的下降速率,達(dá)到提高懸空相電壓幅值的目的。當(dāng)電機(jī)轉(zhuǎn)速達(dá)到預(yù)定值后,切換為反電動勢過零檢測方法,切除起動電阻,完成電機(jī)起動過程。
但需要注意:因外加起動電阻增大,同時也會降低電機(jī)的起動力矩;又因起動過程中起動電流下降速度過快,會造成力矩波動增大。應(yīng)保證懸空相電壓過零點可明顯測出的同時,盡量保證起動力矩大些,這樣可實現(xiàn)電機(jī)攜帶更大負(fù)載的起動。
5 起動方法的驗證
以42BL-2426W-001型三相星型無刷直流電機(jī)為例。電機(jī)基本參數(shù):額定電壓UN=24 V;額定電流IN=1.8 A;空載電流I0=0.64 A;電機(jī)的電阻值R=1.8Ω;電感值(未考慮磁路飽和效應(yīng))L=2.59 mH;額定轉(zhuǎn)速nN=4 000 r/min;空載轉(zhuǎn)速n0=5 800 r/min;額定功率為26 W;電機(jī)的時間常數(shù)約為600μs;該電機(jī)的時間反電動勢系數(shù)為0.012 4 V/(r·min-1)。根據(jù)式(10)中的無刷直流電機(jī)瞬態(tài)模型在Simulink下建立該數(shù)學(xué)模型[5],如圖6所示。該模型中相電感的自感與互感系數(shù)是與轉(zhuǎn)子位置變化的函數(shù);采用Hpwm_Lpwm控制方式驅(qū)動;在相繞組上串接起動電阻阻值與電機(jī)自身相繞組阻值相等,且為1.8 Ω。

圖6 無刷直流電機(jī)閉環(huán)起動方法Simulink模型
根據(jù)圖6中的數(shù)學(xué)模型,對無刷直流電機(jī)閉環(huán)起動方法進(jìn)行驗證,可得以下仿真波形,如圖7~圖10所示。
從圖7~圖9中可知,在起動過程中,電機(jī)轉(zhuǎn)速逐漸升高,懸空相的反電動勢逐漸增大,同時在起動時,電流變化較快,懸空相的感應(yīng)電壓值較大;當(dāng)達(dá)到0.02 s附近時,轉(zhuǎn)速達(dá)到預(yù)定值4 000 r/min,電機(jī)運行穩(wěn)定,轉(zhuǎn)速恒定,反電動勢變化趨于穩(wěn)定,而電流變化速率降低,感應(yīng)電動勢變小,幾乎為零。從圖10中可以看出,采用Hpwm_Lpwm控制方式時,電機(jī)的中性點電壓不在恒定,為一個在Ud/2附近變化的曲線,但中性點的幅值波動并沒有造成過零點的超前或滯后問題。該電機(jī)的端電壓波形如圖11所示。
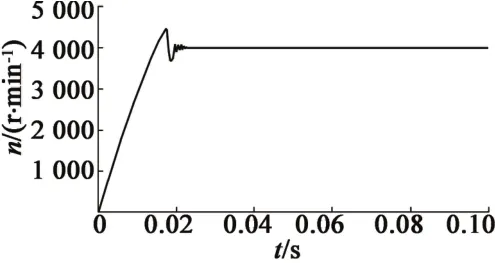
圖7 轉(zhuǎn)速波形

圖8 起動過程中感應(yīng)電動勢與反電動勢波形
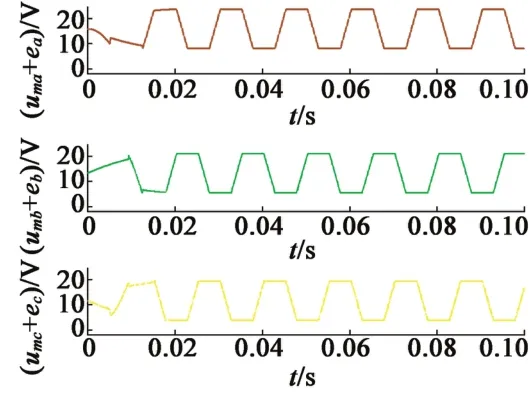
圖9 感應(yīng)電壓與反電動勢疊加波形

圖10 中性點電壓波形
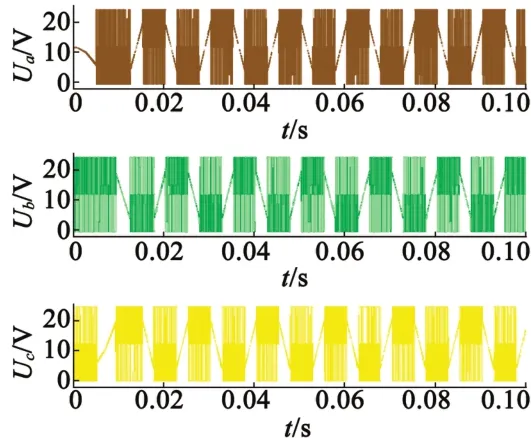
圖11 Hpwm_Lpwm控制方式下的電機(jī)端電壓波形
將圖11中的圖形局部放大可得圖12。從圖12(a)中可以發(fā)現(xiàn),電機(jī)在起動時刻的第一個過零點并不明顯,但該點不會造成起動失步問題;從圖12(b)中可知,起動過后出現(xiàn)的電機(jī)感應(yīng)電勢過零點十分清晰。
以下是對新型的無刷直流電機(jī)閉環(huán)起動方法在STM8S無刷直流電機(jī)實驗平臺上的實驗驗證[12]。整個起動過程包括:轉(zhuǎn)子初始位置檢測,轉(zhuǎn)子強(qiáng)制定位,檢測懸空相感應(yīng)電壓過零點代替反電動勢過零點的起動過程3個階段。其中轉(zhuǎn)子初始位置檢測方法采用施加電壓脈沖的電感法[13-14]。在實驗過程中,電機(jī)選用空載運行狀態(tài),設(shè)定轉(zhuǎn)速為4 000 r/min,且電機(jī)各相定子繞組外接串聯(lián)起動電阻的阻值大小與電機(jī)定子相繞阻值大小相等同為1.8Ω,同時設(shè)定電機(jī)初始的轉(zhuǎn)子位置位于Ⅰ區(qū)域中。

圖12 電機(jī)端電壓局部放大圖

圖13 無刷直流電動機(jī)起動方法試驗平臺
經(jīng)該實驗平臺驗證,并由示波器采集起動過程中的母線電流波形、電機(jī)運行時刻的端電壓波形、電機(jī)運行時刻的虛擬中性點電壓波形,如圖14所示。

圖14 新型起動過程驗證實驗測試波形
從實驗中可知,電機(jī)的實際轉(zhuǎn)速為4 117 r/min。從圖14(b)中可以看出,電機(jī)起動過程中先要檢測出轉(zhuǎn)子初始位置,再經(jīng)0.1 s后施加一個與轉(zhuǎn)子位置相鄰的定子磁勢令電機(jī)轉(zhuǎn)子強(qiáng)制定位,因轉(zhuǎn)動角度最大時僅為30°電角度,故施加定子磁勢的時長定為0.2 s。轉(zhuǎn)子強(qiáng)制定位后,再經(jīng)0.4 s電機(jī)進(jìn)入檢測懸空相感應(yīng)電壓過零點代替反電動勢過零點的起動過程階段,從母線電流可以看出,電機(jī)起動時刻的電流變化速率很快,且起動電流很高;當(dāng)電機(jī)起動過后,電流迅速下降,電流變化速率降低,電流波動保持穩(wěn)定。上述實驗結(jié)論與前文分析一致,因此在起動過程中,電機(jī)懸空相的感應(yīng)電壓會很高,且遠(yuǎn)遠(yuǎn)大于反電動勢。
從圖14(c)中可以看出,理論上經(jīng)分壓采集后的電機(jī)中性電壓為2.16 V,但實際中電機(jī)的虛擬中性點電壓并不是恒定的數(shù)值,這與之前文中分析結(jié)論相同。原因在于采用Hpwm_Lpwm控制方式,會造成電機(jī)虛擬中性點電壓的幅值變化。但該變化并未造成電機(jī)懸空相感應(yīng)電壓的過零點的左右偏移。
從圖14(d)端電壓波形圖中可看出,懸空相感應(yīng)電壓的過零點比較明顯,并且該方法可完成電機(jī)的起動過程。為能體現(xiàn)該起動過程的優(yōu)越性,本文同樣制作了傳統(tǒng)的三段式無感起動過程程序與本文方法做對比,該方法的PWM控制方式選用傳統(tǒng)的PWM_ON方式驅(qū)動,傳統(tǒng)的三段式無感起動過程的電機(jī)轉(zhuǎn)子強(qiáng)制定位方法以AB相導(dǎo)通時產(chǎn)生的磁勢作為強(qiáng)制定位磁勢。在該實驗中可得到相應(yīng)的端電壓波形如圖15所示。
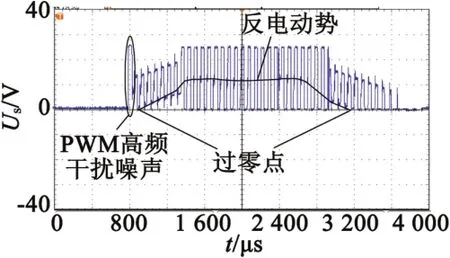
圖15 傳統(tǒng)三段式無感起動方法的單相端電壓波形
將傳統(tǒng)無感起動方法與本文的新型無感閉環(huán)起動方法對比,因本文的感應(yīng)電壓過零點明顯,同時PWM高頻干擾噪聲得到削弱,所以電機(jī)的換相點時刻確定較為準(zhǔn)確,起動過程中電機(jī)振動較小。因此該新型起動方法擺脫了傳統(tǒng)無感起動方法中的不足之處,同時兼具了電機(jī)起動穩(wěn)定的優(yōu)勢,相比傳統(tǒng)無感起動方法而言,更具有實用價值和發(fā)展優(yōu)勢。
6 結(jié) 語
綜上所述,利用懸空相的感應(yīng)電壓在啟動階段遠(yuǎn)大于反電動勢,且二者過零點相同的原理,可實現(xiàn)無刷直流電機(jī)的在起動過程中對轉(zhuǎn)子位置的檢測,確定過零點信息,實現(xiàn)閉環(huán)起動。最后,并對該方法提出改進(jìn),增大了電機(jī)啟動過程中感應(yīng)電壓的幅值大小,同時選擇對相電壓之和的過零點檢測代替分別對各相電壓的過零檢測,使得被測電壓幅值增大,過零點更為明顯,對無刷直流電機(jī)的無感控制方法的研究與應(yīng)用具有深遠(yuǎn)意義。
[1]丘東元,許樹源,張波.檢測電感電流預(yù)測電感電壓的非線性處理方法[J].中國電機(jī)工程學(xué)報,2004,24(8):78-82.
[2]年珩,賀益康,黃雷.永磁同步電機(jī)無位置傳感器運行場路耦合分析[J].中國電機(jī)工程學(xué)報,2008,28(18):104-109.
[3]顧繩谷.電機(jī)與拖動基礎(chǔ)[M].北京:機(jī)械工業(yè)出版社2007.
[4]STEPHEN D.UMANS,Electirc Machinery[M].Seventh Edition.Beijing:Publishing House of Electronics Industry,2014.
[5]黃守道,鄧建國,羅德榮.電機(jī)瞬態(tài)過程分析的MATLAB建模與仿真[M].北京:電子工業(yè)出版社,2013:215-217.
[6]鐘繼隆,周蘇,王明強(qiáng).考慮磁路飽和效應(yīng)的無刷直流電機(jī)電感參數(shù)研究[J].佳木斯大學(xué)學(xué)報,2014.3,32(2):176-186.
[7]湯蘊璆,史乃.電機(jī)學(xué)[M].2版.北京:機(jī)械工業(yè)出版社,2007.
[8]任雷,崔芮華,王宗培.永磁同步電機(jī)繞組電感的飽和效應(yīng)[D].電工技術(shù)學(xué)報,2000,15(1):21-25.
[9]胡慶波,鄭繼文,呂征宇.混合動力中無刷直流電機(jī)反接制動PWM調(diào)制方法的研究[J].中國電機(jī)工程學(xué)報,2007,27(30):87-91.
[10]宋飛,周波,吳小婧.校正無位置傳感器無刷直流電機(jī)位置信號相位的閉環(huán)控制策略[J].中國電機(jī)工程學(xué)報,2009,29(12):52-57.
[11]邱關(guān)源.電路[M].5版.北京:高等教育出版社,2005.
[12]李家慶,李芳,葉文.無刷直流電機(jī)控制應(yīng)用--基于STM8S系列單片機(jī)[M].北京:北京航空航天大學(xué)出版社,2014:1-11,367-368.
[13]LAI Y S,LIN Y K.Assessment pulse-width modulation techniques for brushless dcmotor drives[J].IEEE Industry Applications Magazine,2008,14(5):34-44.
[14]WOOK-JIN L,SEUNG-KI S.A new starting method of BLDC motorswithout position sensor[J].IEEE Transactions on Industry Applications,2004(4):2397-2402.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
