無人直升機攝影測量系統的設計與驗證
2017-05-11 08:11:17張永生戴晨光包全福
測繪通報 2017年4期
薛 武,張永生,戴晨光,趙 玲,包全福
(1. 信息工程大學,河南 鄭州 450001; 2. 地理信息工程國家重點實驗室,陜西 西安 710054; 3. 礦山空間信息技術國家測繪地理信息局重點實驗室,河南 焦作 454003; 4. 91039部隊,北京 102400; 5. 95806部隊,北京100076)
無人直升機攝影測量系統的設計與驗證
薛 武1,2,3,張永生1,戴晨光1,趙 玲4,包全福5
(1. 信息工程大學,河南 鄭州 450001; 2. 地理信息工程國家重點實驗室,陜西 西安 710054; 3. 礦山空間信息技術國家測繪地理信息局重點實驗室,河南 焦作 454003; 4. 91039部隊,北京 102400; 5. 95806部隊,北京100076)
針對目前已有的無人機攝影測量系統存在的精度不高、依賴起降場地、續航能力差等問題,設計并實現了無人直升機攝影測量系統,該系統將Phase相機、Applanix POS設備集成在3軸穩定對地觀測吊艙內,具有垂直起降、載荷量大、續航能力強、測量精度高等優勢。在嵩山遙感定標場開展了測試飛行,結果表明:系統直接地理定位精度較高,可用于應急測圖;在少量控制點參與下,系統定位精度遠優于1∶500測圖要求,可用于大比例尺測圖,具有重要的推廣應用價值。
無人直升機;光電吊艙;攝影測量;嵩山定標場;精度驗證
隨著無人機技術的快速發展與應用,利用無人機平臺進行遙感測繪成為攝影測量與遙感的研究熱點和重要發展方向[1-6]。國內外學者針對不同平臺(固定翼、多旋翼等)、不同傳感器(可見光、多光譜、激光雷達等)的無人機系統進行了測量精度驗證和工程應用研究,結果表明無人機作為遙感平臺具有明顯的優勢和很大的潛力,但是很多問題也亟待解決,如無人機起降方式、平臺的穩定性和可靠性、獲取數據的質量等。這些問題制約著無人機遙感測繪的進一步發展與推廣[7-8]。
目前,中小型固定翼無人機的測繪應用最為廣泛,如天寶公司的UX3測繪無人機、拓普康公司的“天狼星”無人機、EBee的senseFly全自動迷你型無人機等。針對無人機數據特點的后處理軟件也得到快速發展,如瑞士pix4D公司的pix4D Mapper、Agisoft公司的Photoscan Pro、Menci公司的Menci APS等。上述無人機在小區域測繪(通常面積<10 km2,如工程測量、災害應急救援等)中發揮了重要作用,但仍然有許多有待改進提高之處。如中小型固定翼無人機續航能力較差,對于100 km2量級的測區需多次飛行,費時費力,后期的接邊與幾何處理十分繁瑣;固定翼無人機通常需要跑道滑跑起飛或著陸,這在很多情況下難以保障,特別是發生地震、泥石流等自然災害需要應急測圖的情況下;目前大多數無人機上搭載的相機為普通卡片機或單反相機,量測精度較差,特別是高程精度難以滿足大比例尺測圖的要求。
國內外學者針對無人機攝影測量的研究主要包括兩方面:一是傳感器集成與應用,即如何結合無人機平臺的特點合理設計載荷,以獲取質量好的數據,使之盡可能符合已有的航空攝影規范要求[2-3];二是無人機數據處理,主要研究如何提高量測定位精度、數據處理自動化程度及數據處理速度[9-11]。兩方面的研究是相互制約、相互促進的,無人機平臺、載荷的發展完善可以使采集的數據質量更好,降低后處理的難度,而數據后處理手段的進步可以降低對于數據獲取的要求,使數據采集更加靈活簡便。
本文擬針對已有的無人機測繪系統存在的問題,設計研發無人直升機攝影測量系統。無人直升機不依賴于機場,可以垂直起降,汽油發動機提供動力,續航能力強,測控半徑大,利用3軸穩定光電吊艙搭載大面陣CCD相機和POS設備,可以快速完成困難地區大比例尺測圖任務。嵩山遙感定標場進行測試飛行表明,該系統完全滿足1∶500大比例尺測圖的規范要求,具有重要意義。
1 無人直升機攝影測量系統
為了解決無人機應用中遇到的上述問題,筆者所在院校圍繞無人機航測改造、多傳感器集成、基于試驗場的多傳感器系統檢校持續開展攻關工作[1-3,5-6]。在對已有國產無人機平臺進行考核與改進的基礎上,設計了無人直升機攝影測量系統。該系統主要由無人直升機、Phase One iXA180面陣CCD相機、POS AV310組合導航系統、VS-3對地觀測光電吊艙等組成,下面分別予以介紹。
1.1 無人直升機平臺
近年來,我國在無人直升機的研發方面取得了顯著的技術進步,某研究所研制的系列無人直升機是一種性能良好的空中平臺,它集遙控、遙測、GPS導航、空中成像、自動控制等多項軟、硬件技術于一體,如圖1所示。其任務載荷可達80 kg,續航時間大于6 h,有效測控半徑不少于100 km。該型無人機在配備不同的任務設備時,可分別作為監控偵察機、無線中繼機、電子干擾機等應用。之所以選擇無人直升機,是因為其具有起降方便,不依賴于機場,可以空中懸停,可以繞飛、倒飛等優點,這些特點是固定翼無人機所不具備的,在搶險救災、反恐維穩等應急條件下可以發揮重要的作用。

圖1 無人直升機
1.2 機載任務載荷
無人機上搭載了丹麥的Phase One iXA180中畫幅航空面陣CCD相機,如圖2所示。鏡頭為Schneider-Kreuznach的55 mm鏡頭,CCD由Dalsa公司制造,尺寸53.9 mm×43.4 mm,像素數為8000萬。在超大畫幅超高像素的基礎上,Phase One新機還擁有16 bit色彩、12.5級動態范圍,影像質量良好。

圖2 Phase One iXA180面陣CCD相機
為了在攝影的同時獲取影像高精度的外方位元素,系統集成了POS AV310組合導航系統,其性能參數見表1。
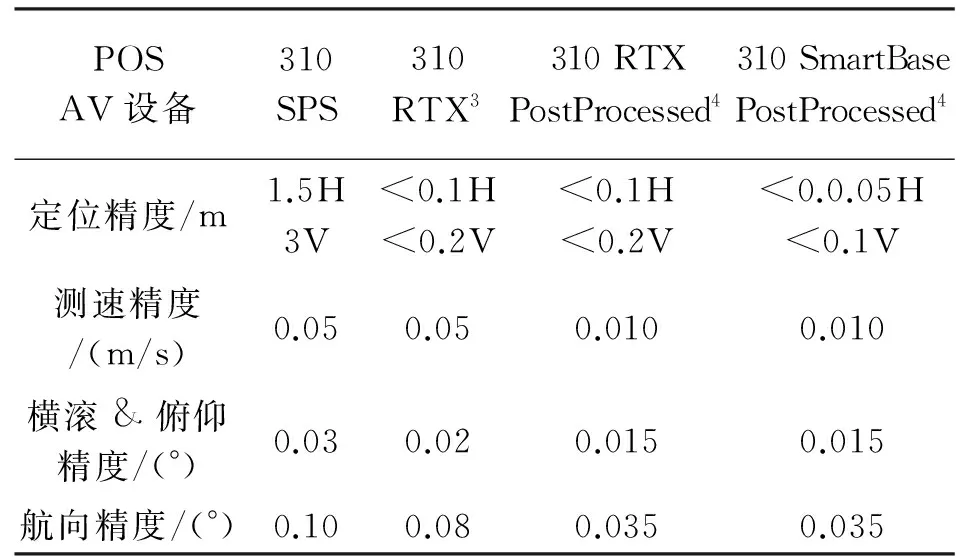
表1 POS AV310性能參數
1.3 VS-3對地觀測光電吊艙
為了盡可能避免無人機飛行過程中的振動對載荷的影響,抵消側風引起的影像旋偏,無人機上搭載了中船717研究所研制的VS-3對地觀測光電吊艙,如圖3所示。無人機吊艙配置傳感器后,具有3軸穩像、振動隔離功能,可以對地面進行數碼拍照及高清成像。實時輸出可見光視頻,利用外部GPS實現傳感器的時間同步,同時實現傳感器正射成像拍照,具有像旋偏角修正功能。光電吊艙的3軸回轉范圍:航向為±30°,橫滾為±10°,俯仰為±12°。
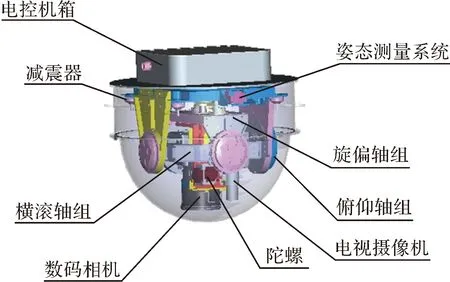
圖3 對地觀測光電吊艙
1.4 系統評價
就目前來看,本文所設計的無人直升機攝影測量系統的各項指標均處于領先水平。無論是平臺的載荷量、續航時間、測控半徑,還是POS的精度、相機的幅面和幾何性能,均為在目前工業水平下所能達到的較理想狀態。前沿的設計理念、先進的硬件配置,為獲取高質量的航攝數據提供了堅實的基礎。
2 系統飛行測試情況
為了驗證平臺的可靠性、穩定性、任務載荷協同工作情況,在青海茶卡鹽湖、安徽滁州等地開展了多次測試飛行(如圖4所示),并在中國(嵩山)遙感定標場開展了定位精度驗證飛行試驗。

圖4 無人機航測遙感試驗
嵩山遙感定標場(如圖5所示)是由信息工程大學、武漢大學與中國資源衛星應用中心合作建設的航空航天遙感定標場。其中的航空幾何定標場面積約為64 km2,共分區布設了214個永久性高精度控制點(平面精度優于2 mm,高程精度優于1 cm),并定期更新固定標志,用于各種航空相機或傳感器的檢定[12-13],控制點的分布如圖5所示。

圖5 嵩山航空定標場控制點分布
2015年10月12日、13日,無人機攝影測量系統在嵩山定標場開展了飛行試驗。10月12日在衛星遙感定標場飛行一個架次,10月13日在航空幾何定標場飛行兩個架次,具體飛行情況如表2、圖6—圖8所示。
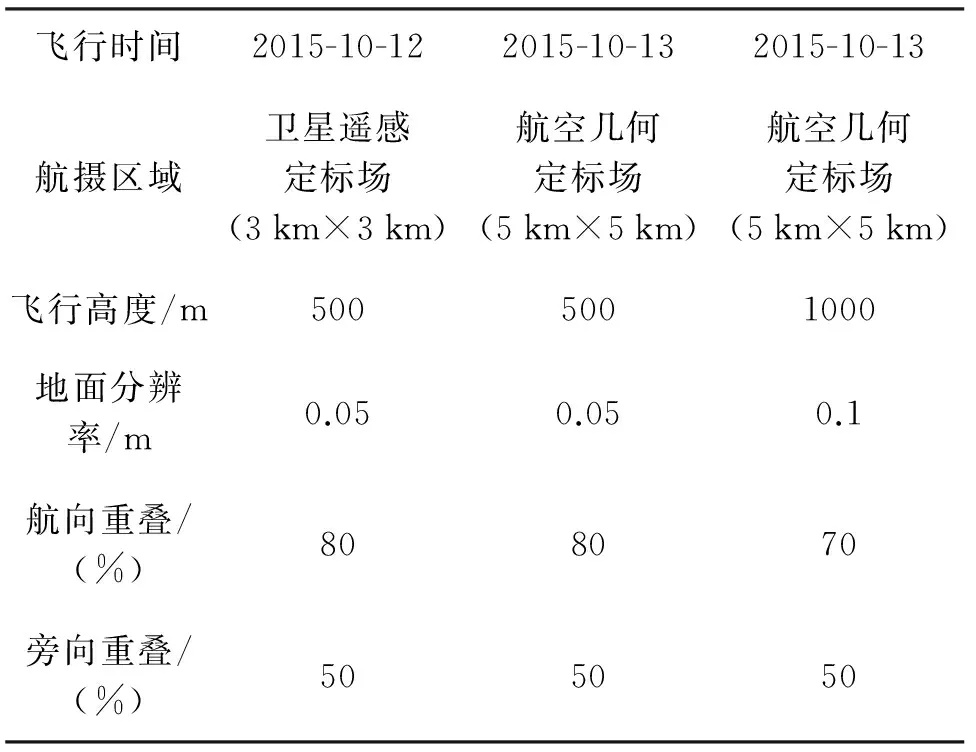
表2 嵩山定標場飛行情況
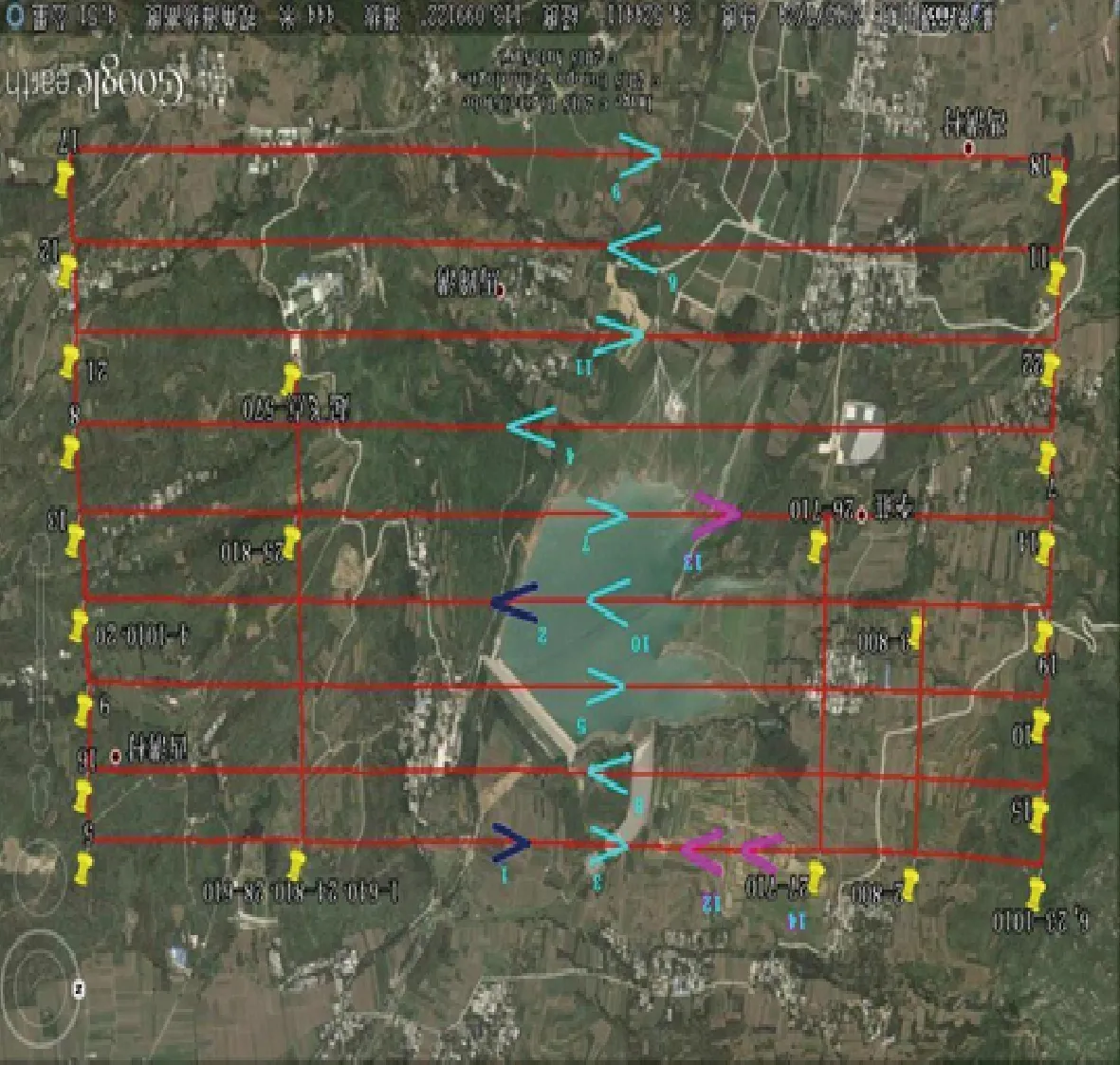
圖6 衛星遙感定標場航跡

圖7 航空幾何定標場航跡(a)
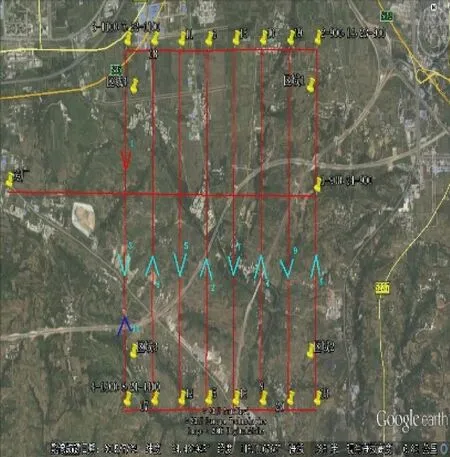
圖8 航空幾何定標場航跡(b)
3 系統精度驗證試驗
3.1 數據處理流程
無人機飛行結束后,對航空幾何定標場5 cm分辨率影像進行了幾何處理,將影像數據、POS數據下載到后處理平臺,按照內業處理流程進行了系統精度驗證,主要流程如圖9所示。
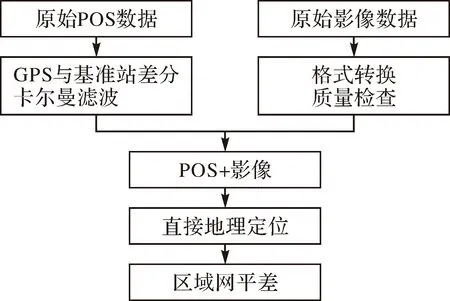
圖9 數據處理流程
3.2 精度驗證試驗
在航空幾何定標場內,選擇了成像清晰、分布相對均勻的21個地面埋石點(如圖10所示),并量測其像方坐標。首先進行直接地理定位精度驗證試驗,將21個控制點作為地面檢查點,將機載POS數據作為影像外方位元素,根據多片前方交會的數學模型[14-16]
(1)
按照最小二乘原理計算檢查點物方坐標,并統計檢查點殘差中誤差,見表3。
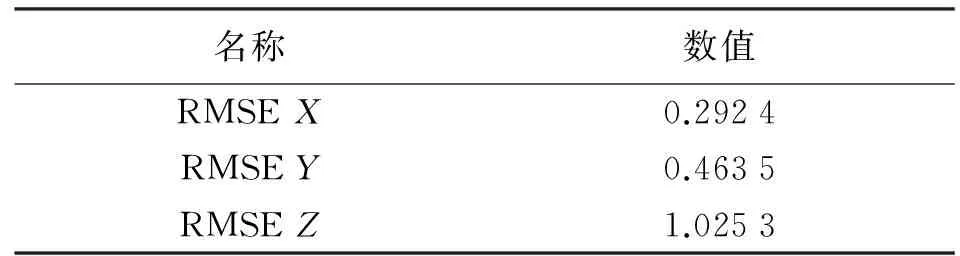
表3 檢查點物方殘差中誤差 m
為了提高定位精度,特別是盡量剔除系統誤差的影響,引入少量地面控制點參與區域網平差,平差過程中利用9個地面控制點、12個地面檢查點。控制點、檢查點分布如圖10所示。
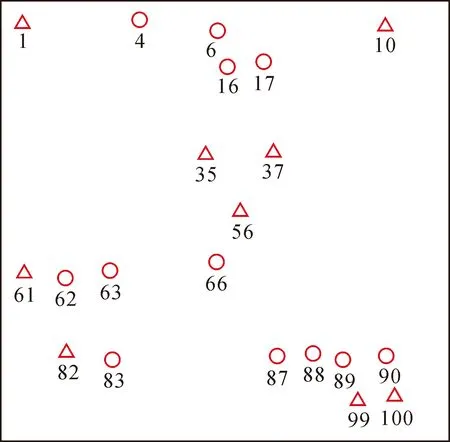
圖10 控制點、檢查點分布
根據POS輔助自檢校光束法區域網平差的數學模型,將機載POS數據作為帶權觀測值進行自檢校光束法平差,模型如下
(2)
式中,Vx、Vc、Vs、Vg、Vi分別為像點坐標、地面點坐標、自檢校參數、GPS攝站坐標和IMU像片姿態角觀測值的改正數向量;x=[ΔXΔYΔZ]T為加密點坐標未知數改正數向量;t=[ΔωΔφΔκΔXSΔYS

統計檢查點的殘差中誤差見表4,殘差分布如圖11所示。
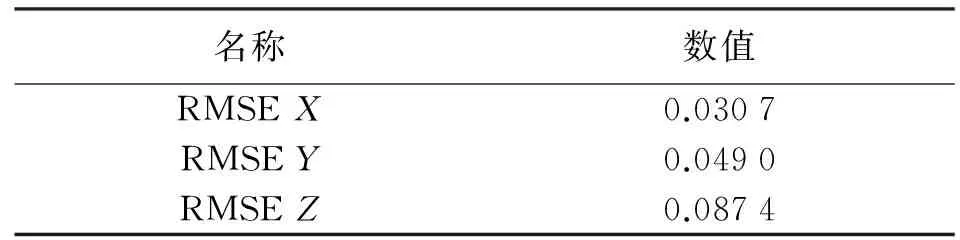
表4 檢查點物方殘差中誤差 m
3.3 結果分析
利用機載POS數據進行直接地理定位能夠取得較高的精度,在應急情況下,可以不經過空中三角測量,直接進行目標定位、影像正射糾正等,提供目標三維坐標、正射影像等測繪保障產品。
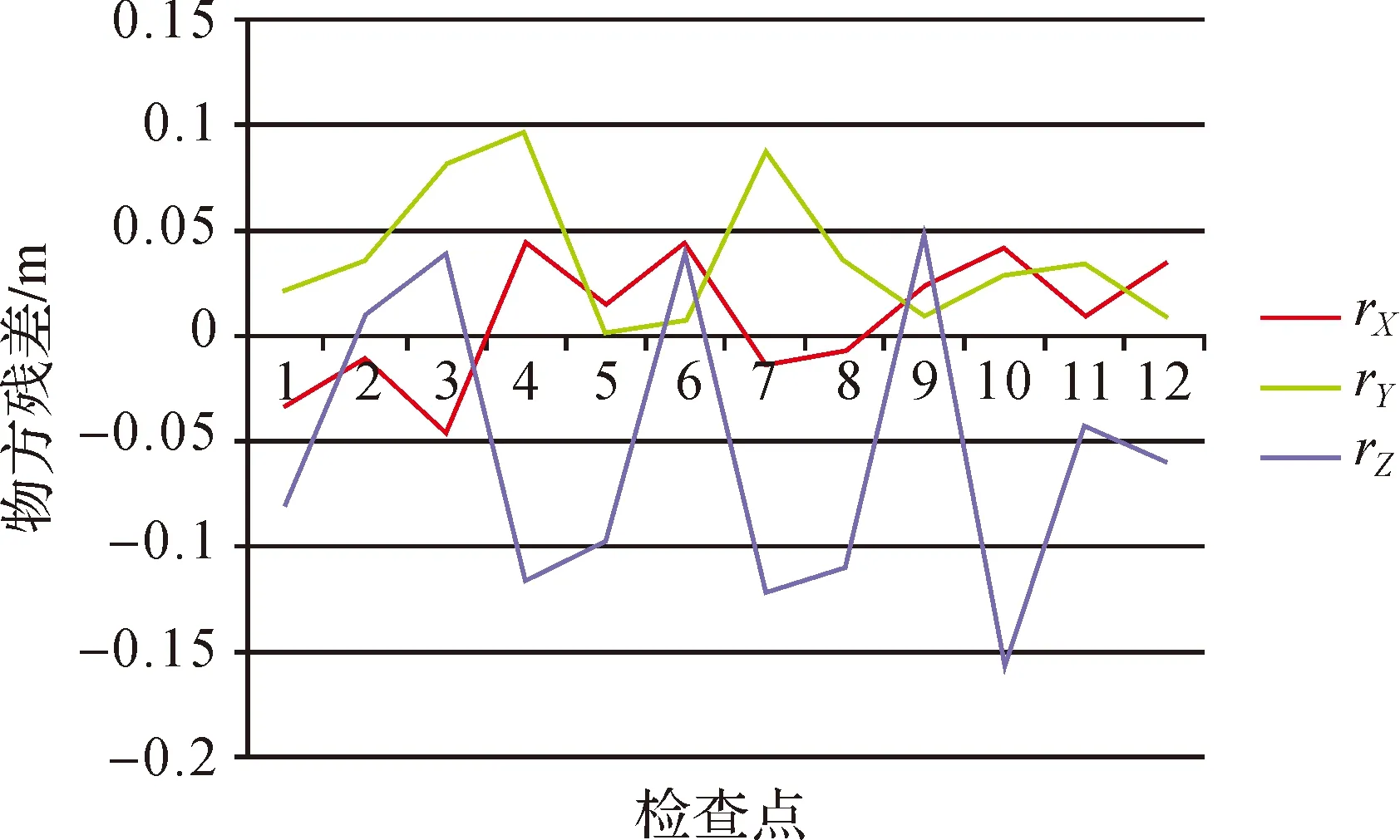
圖11 檢查點物方殘差
在引入少量控制點后,無人直升機攝影測量系統的幾何定位精度得到了顯著提升,參考國家測繪地理信息局頒布的《數字航空攝影測量 空中三角測量規范》中1∶500地形圖精度要求(見表5),系統定位精度遠優于規范要求,完全滿足大比例尺地形圖測繪的需求,可以應用于基礎測繪。

表5 《數字航空攝影測量 空中三角測量規范》中1∶500地形圖空三精度要求 m
4 結 語
基于中型無人直升機遙感平臺,設計并實現了無人直升機攝影測量系統,對系統的組成進行了較為詳細的介紹。與其他無人機攝影測量系統相比,該系統具有載荷量大、垂直起降、續航能力強、測控半徑大、性能先進等明顯優勢。在嵩山遙感定標場進行了飛行試驗,對系統的定位精度進行了評估,結果表明該系統直接地理定位精度較高,可以滿足應急測繪的需要,少量控制點參與下的區域網平差精度完全滿足1∶500大比例尺測圖的要求,達到了預期的設計目標,具有重要的推廣應用價值。
[1] 張永生.現場直播式地理空間信息服務的構思與體系[J]. 測繪學報, 2011, 40(1): 1-4.
[2] 吳云東,張強.立體測繪型雙翼民用無人機航空攝影系統的實現與應用[J].測繪科學技術學報, 2009, 26(3): 161-164.
[3] 吳云東,張強,王慧,等.無人直升機低空數字攝影與影像測量技術[J]. 測繪科學技術學報, 2007, 24(5): 328-331.
[4] 王志豪,劉萍.無人機航攝系統大比例尺測圖試驗分析[J].測繪通報,2011(7):18-21.
[5] 于英. 無人機動態攝影測量若干關鍵技術研究[D].鄭州:信息工程大學,2014.
[6] 薛武.無人機視頻地理信息定標與直播處理方法[D].鄭州:信息工程大學,2014.
[7] REMONDINO F, BARAZZETTI L, NEX F, et al. UAV Photogrammetry for Mapping and 3d Modeling-current Status and Future Perspectives [J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2011, 38(1): 22-26.
[8] BARAZZETTI L, REMONDINO F, SCAIONI M, et al. Fully Automatic UAV Image-based Sensor Orientation[C]∥Proceedings of the 2010 Canadian Geomatics Conference and Symposium of Commission I. [S.l.]: ISPRS, 2011.
[9] EISENBEISS H.UAV Photogrammetry [M].Zurich: ETH, 2009.
[10] 沈永林, 劉軍, 吳立新, 等. 基于無人機影像和飛控數據的災場重建方法研究[J]. 地理與地理信息科學, 2011, 27(6): 13-17.
[11] 許志華, 吳立新, 劉軍, 等. 顧及影像拓撲的 SfM 算法改進及其在災場三維重建中的應用[J]. 武漢大學學報(信息科學版), 2015, 40(5): 599-606.
[12] 張永生. 高分辨率遙感測繪嵩山實驗場的設計與實現——兼論航空航天遙感定位精度與可靠性的基地化驗證方法[J]. 測繪科學技術學報, 2012, 29(2): 79-82.
[13] 許妙忠,尹粟,李振濤. 航空幾何定標場建設技術研究[C]∥Aisa GIS 2010 International Conference. Taiwan: [s.n.], 2010.
[14] 李德仁,袁修孝.誤差處理與可靠性理論[M]. 武漢:武漢大學出版社, 2012:55-56.
[15] 王之卓.攝影測量原理續編[M].武漢:武漢大學出版社,2007.
[16] 耿則勛,張保明,范大昭.數字攝影測量學[M]. 北京:測繪出版社, 2010.
[17] 郭復勝.無人機圖像的三維重建方法研究[D].北京:中國科學院大學,2013.
[18] 許志華, 吳立新, 劉軍, 等. 顧及影像拓撲的 SfM 算法改進及其在災場三維重建中的應用[J]. 武漢大學學報(信息科學版), 2015, 40(5): 599-606.
[19] 中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會.數字航空攝影測量空中三角測量規范:GB/T 23236—2009[S]. 北京:中國標準出版社,2009.
Design and Validation of Unmanned Helicopter Photogrammetric System
XUE Wu1,2,3,ZHANG Yongsheng1,DAI Chenguang1,ZHAO Ling4,BAO Quanfu5
(1. Information Engineering University,Zhengzhou 450001,China; 2. State Key Laboratory of Geo-information Engineering, Xi’an 710054,China; 3. Key Laboratory of Mine Spatial Information Technologies of National Adminisration of Surveying, Mapping & Geoinformation,Jiaozuo 454003,China; 4. 91039 Troops,Beijing 102400,China; 5. 95806 Troops,Beijing 100076,China)
Aiming at the problems of existing UAV mapping systems,such as low accuracy,depending on takeoff and landing site,poor endurance and so on,a photogrammetric system based on unmanned helicopter has been designed and developed. With Phase camera,Applanix POS equipment integrated in the three-axis stabilized earth observation pod,the system has the advantages of vertical takeoff and landing, great loading capacity, strong endurance ability and high measurement accuracy. Test flights were carried out in Songshan remote sensing calibration field. The results show that the system owns high accuracy of direct geolocation, and so can be used for emergency mapping. With the participation of a small number of control points, the positioning accuracy of the system is far better than 1∶500 mapping requirements, and the system can also be used for large scale mapping, which has important application value.
unmanned helicopter; optical pod; photogrammetry; Songshan calibration field; accuracy verification
薛武,張永生,戴晨光,等.無人直升機攝影測量系統的設計與驗證[J].測繪通報,2017(4):58-62.
10.13474/j.cnki.11-2246.2017.0120.
2016-09-12;
2017-02-06
國家自然科學基金(41501482);地理信息工程國家重點實驗室開放研究基金(SKLGIE2014-M-3-1);礦山空間信息技術國家測繪地理信息局重點實驗室開放基金(KLM201404);軍事測繪導航工程軍隊重點實驗室開放基金
薛 武(1988—),男,博士生,研究方向為無人機攝影測量。E-mail:xuewu_81@126.com
P23
A
0494-0911(2017)04-0058-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(2017年9期)2017-09-26 03:41:45