徠卡3D Disto的臥罐計量方法
2017-05-11 08:11:46張希波丁國鑫
測繪通報 2017年4期
關鍵詞:測量
張希波,袁 斌,丁國鑫
(徠卡測量系統貿易(北京)有限公司,北京 100020)
徠卡測量新技術應用專欄
徠卡3D Disto的臥罐計量方法
張希波,袁 斌,丁國鑫
(徠卡測量系統貿易(北京)有限公司,北京 100020)
目前國內加油站使用的儲油罐多為一次性埋放,長期使用。而罐體在使用過程中不可避免地會發生變形、傾斜,對于長期使用埋在地下的臥式金屬罐,需要及時對其容積進行檢測。本文利用徠卡3D Disto嘗試構建一個自動測量與生成臥式罐容積計量表的方法,并通過在PC端編程加以實現。
1 操作流程
該流程主要參照《臥式金屬罐容積檢定規程》(JJG 266—1996)進行設計制定。主要包括以下幾個步驟:①將儀器固定在腳架上放入罐中;②水平掃描確定罐體走向及封頭拐點位置;③掃描罐體橫截面確定直徑;④確定罐體縱橫走向和傾斜,得到經過傾斜改正的罐體半徑;⑤對罐體進行掃描計算并生成油罐容積表。如圖1所示。
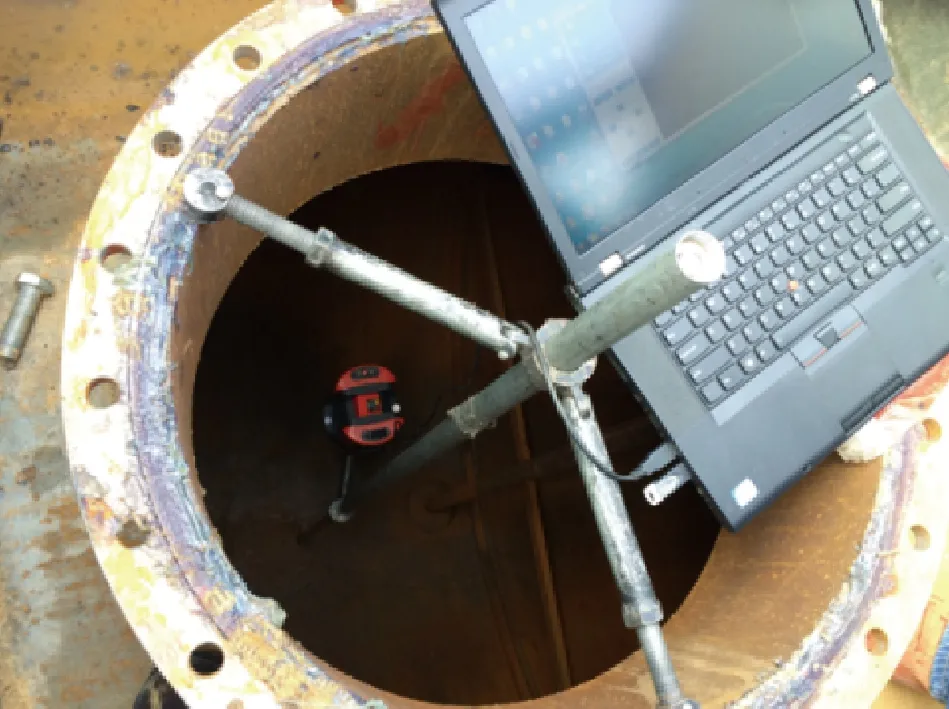
圖1 3D Disto油罐計量現場
2 技術實現
2.1 3D Disto簡介
3D Disto具有±3°的較大自動安平范圍,水平與豎直方向雙馬達驅動,測量盲區相對常規儀器減小很多,架設更加靈活;采用安全的二級激光,測距精度可達1 mm。儀器雖然小巧,但測角精度仍然達到5″,完全滿足臥罐計量的需求。針對不同工作的防爆需求,提供防爆標志為“Exib II BT4”的防爆版本與防爆標識為“Exia Ⅱ A T4 Ga”的石油區域可用的防爆版本。
2.2 初始化判斷
(1) 通過支架將3D Disto放置在罐體下端位置,首先水平掃描罐體下方(掃描點P1—Px),確定罐體走向,并初步判斷罐體封頭、拐點位置。如圖2(a)所示。
(2) 測量點A、B、C(即罐體近似橫截面上3點),通過3點構成一個圓,計算圓筒半徑R和過圓心的近似軸線L。如圖2(b)所示。
(3) 沿罐體水平方向豎直掃描罐體上半段,掃描點T1—Tx。在步驟(1)初步判斷位置的基礎上,對其所在區間(軟件設置區間大小)作逼近掃描,進一步精確罐體封頭和拐點位置。確定罐體傾斜角度θ,修正在上一步中得到的半徑R,并對軸線L作傾斜改正。如圖2(c)所示。
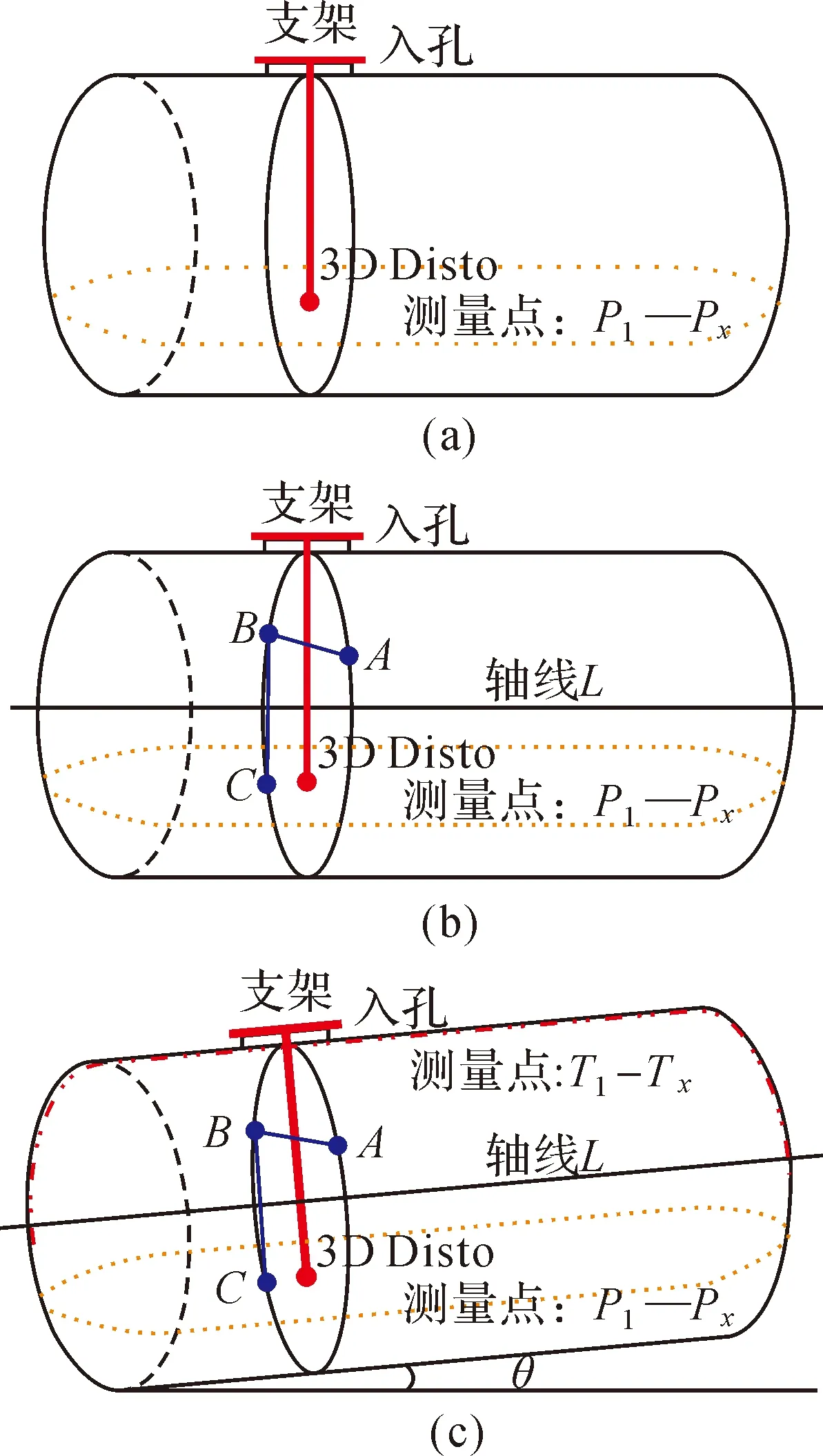
圖2 初始化判斷過程
2.3 掃描方法
2.3.1 幾何測量法
按照國家標準的計量規范,依次掃描臥罐兩端封頭、拐點,測量臥罐圈板斷面,計算臥罐容積。測量30 m3的臥罐只需20 min左右,效率非常高。如圖3所示。
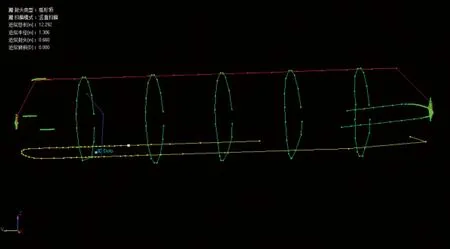
圖3 幾何測量法
2.3.2 水平掃描法
依照初始判斷的臥罐尺寸數據,由下至上掃描臥罐水平斷面,通過積分計算出臥罐容積。該方法的成果精度完全滿足國家千分之三的檢定精度要求。如圖4所示。
2.4 計算方法
各點相對坐標計算公式如下
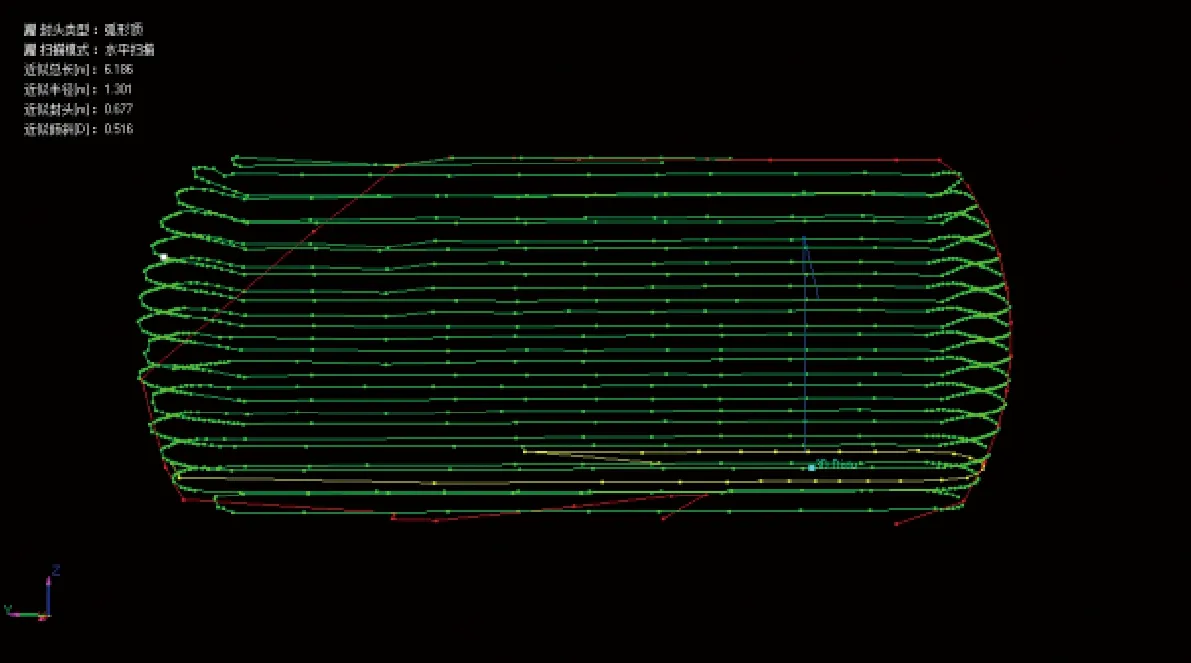
圖4 水平掃描法
各斷面半徑計算如下
建模計算容量:①通過儀器測量的點云數據構建立體三角格網,根據三角格網計算格網所圍成的空間體積;②對罐體進行任意斷面的切割;③根據相鄰切割的斷面計算所圍成的容積,并生成容量表;④真實反映臥罐體積,容積計算精度高。如圖5所示。
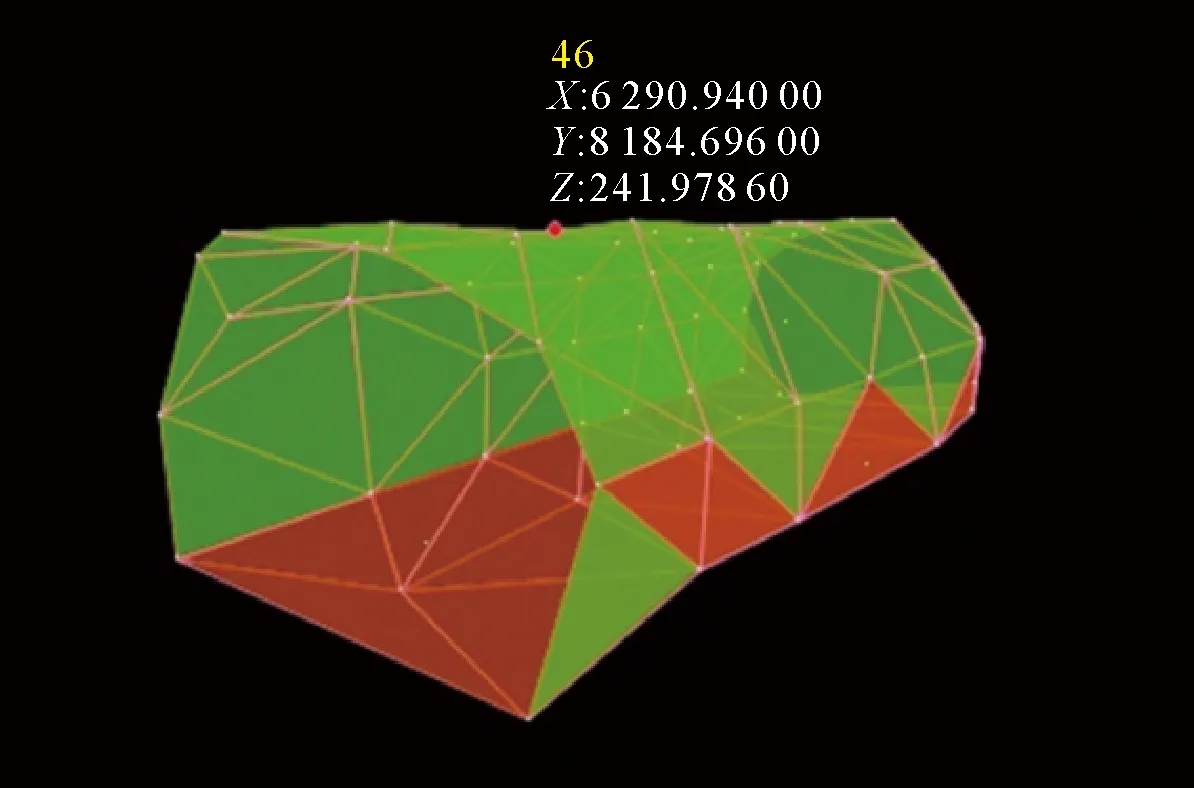
圖5 臥罐三角網模型
3 技術分析
在中石油某加油站,針對同一個罐分別用灌水法與3DDisto作兩次測算,該臥罐總容量為30m3,對比中最大差值為0.035m3,誤差比率為1.17‰,符合規范規定的誤差在3‰以內的要求。整個測量過程中,3DDisto不但環保,節約水資源,而且效率高出數倍。見表1。
另外,采用常規計量儀和傳統幾何法與3DDisto進行比測,該臥罐總容量為30m3。其中與計量儀對比中最大差值為0.062 1m3,誤差比率為2.05‰,符合規范規定的誤差在3‰以內的要求。與傳統法對比中最大差值為0.063m3,誤差比率為2.08‰,符合規范規定的誤差在3‰以內的要求。見表2。
整個測量過程中,使用徠卡3DDisto無需人員下罐,更加安全。

表1 灌水法與徠卡數據對比
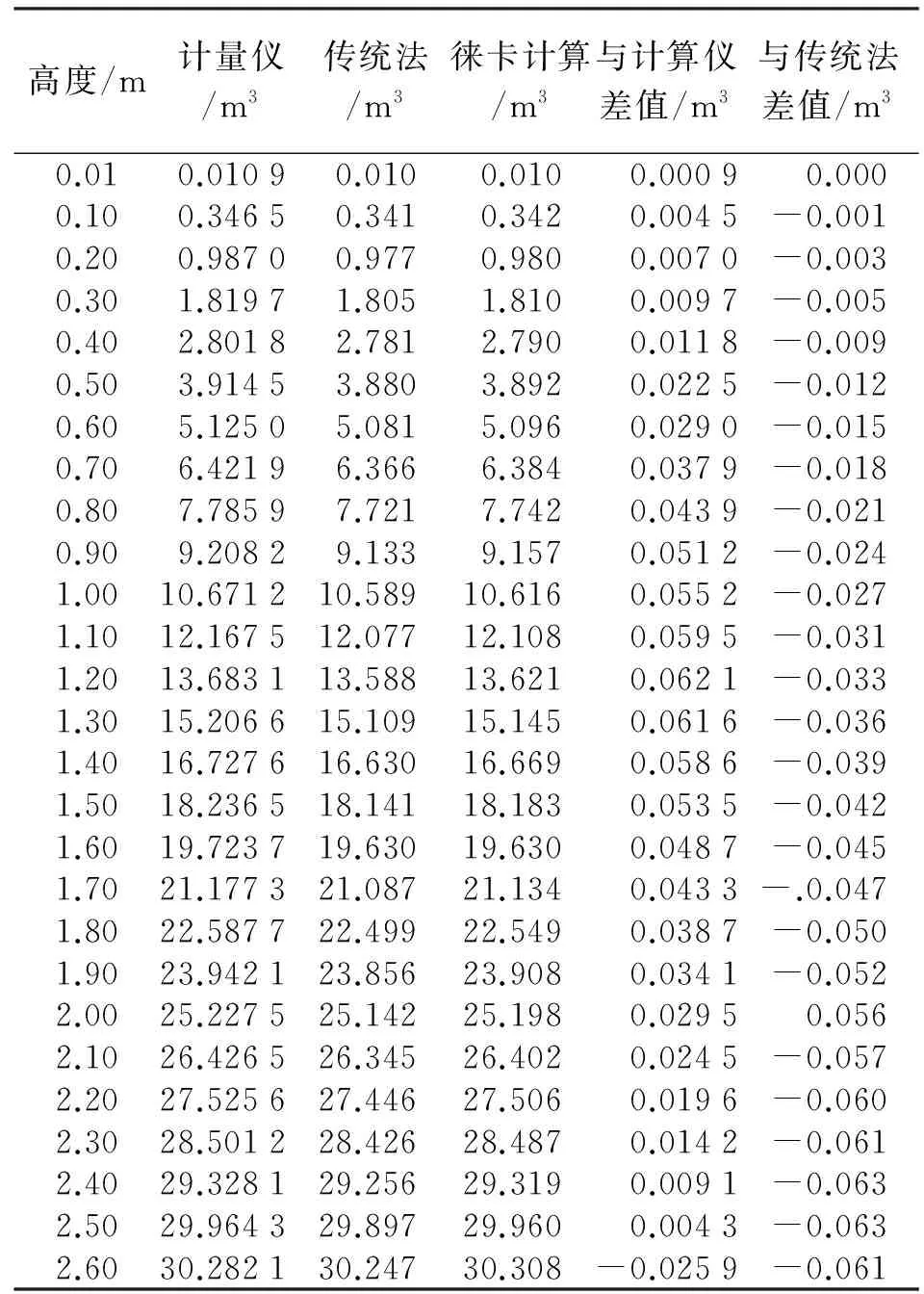
表2
4 結 語
徠卡3D Disto搭配臥罐精靈軟件進行臥罐測量,相比傳統方法速度更快,安全性更高,精度完全滿足要求,已經在部分加油站投入使用。筆者相信在不久之后該技術會更加廣泛地應用于實際工作中。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00