基于神經網絡滑模的智能車輛橫向控制*
2017-05-10 12:56:02陳濤,陳東
傳感器與微系統 2017年5期
陳 濤, 陳 東
(湖南大學 汽車車身先進設計制造國家重點試驗室,湖南 長沙 410082)
基于神經網絡滑模的智能車輛橫向控制*
陳 濤, 陳 東
(湖南大學 汽車車身先進設計制造國家重點試驗室,湖南 長沙 410082)
以智能車輛為研究對象,針對車輛模型存在高度非線性動態特性、參數不確定性以及行駛時受外部干擾較多導致控制精度不高、魯棒性差等問題,提出了采用徑向基函數(RBF)神經網絡滑模控制方法。建立2自由度線性車輛模型和自由度非線性整車模型,在傳統2自由度車輛控制模型狀態方程的基礎上推導出新的狀態方程并以此設計了相應控制器。利用李雅普諾夫(Lyapunov)穩定性理論推導出神經網絡的權,并證明控制系統的穩定性。仿真結果表明:與傳統的滑模控制方法相比,該方法控制精度高,有較強的魯棒性。
智能車輛; 神經網絡; 滑模控制; 橫向控制
0 引 言
隨著汽車工業的發展以及科技的不斷進步,車輛駕駛輔助設備逐漸進入人們的視野,如車道保持系統、道路偏離預警系統、主動避撞系統等,都涉及對車輛的橫向控制。橫向控制[1]是指車輛通過機器視覺、激光雷達或全球定位系統(GPS)等傳感器獲得反饋的信息,按照一定的控制策略使車輛沿著指定的路徑行駛。因為車輛存在高度非線性、模型不確定性以及受外部干擾較多等問題,所以,對車輛的橫向控制一直以來都是國內外學者研究的重點之一。郭景華和胡平等人[2]提出了基于遺傳優化的模糊控制方法,通過遺傳算法對橫向模糊控制器的隸屬度函數參數和控制規則自動優化,并通過仿真和實車進行了驗證,該方法在低速時效果較好,隨著車速的增加,車輛模型與實際情況偏差會逐漸增大,導致控制效果變差。趙熙俊和陳慧巖等人[3]設計了一個魯棒PID控制器用來提高系統的瞬態響應。該方案設計較為簡單、易于實現,但對于外界路面的復雜情況存在確定參數困難,難以實現自適應控制等不足。王家恩和陳無畏等人[4]提出了跟蹤期望橫擺角速度的車輛橫向控制方法并設計了滑模控制器跟蹤目標路徑。目標路徑由車輛當前位置和預瞄點之間實時規劃產生,但是車輛的實時橫擺角速度在實際中較為難測,因此,該方法可行性較低。Gregor和Igor[5]提出了一種基于模型預測軌跡跟蹤的控制方法,使用線性化動態跟蹤誤差來預測未來的系統行為。但是當存在較大跟蹤誤差時,系統的魯棒性存在不足,自適應較差。Soualmi和Sentouh等人[6]采用了模糊T-S(Takagi-Sugeno)控制方法,通過控制方向盤轉矩來追蹤期望路徑,但是其控制力矩抖振較為嚴重,在實際應用中容易造成車輛機械結構的磨損。Onieva和Naranjo等人[7]設計了一種利用遺傳算法優化的模糊控制器,在直線道路上,控制較為精確,但在曲線道路上性能表現較差。
近些年,部分學者提出了滑模控制方法[8~10],設計橫向控制器,它具有魯棒性較強、系統響應快、不需要精確的模型等優點。但是在滑模面附近由于高頻轉換控制會產生高頻抖振現象,這種抖振會影響控制的精確性,嚴重時會使系統產生振動或失穩造成車輛的機械磨損和硬件電路的損壞。徑向基函數(RBF)神經網絡是一種局部逼近神經網絡,能任意精度逼近任意連續函數。
基于以上原因,本文提出了RBF神經網絡滑模控制方法,結合兩者優點,減少系統產生的抖振。同時,以上研究未曾考慮模型不確定性、非線性和外界干擾較大的情況,本文通過RBF神經網絡逼近不確定的外部干擾和建模誤差,使得控制更為精確同時增強系統的魯棒性。
1 控制系統結構設計
控制系統的設計目的是通過控制前輪轉角使得車輛與期望路徑的偏差迅速縮減為零。本文的控制系統結構框圖如圖1所示。前輪轉角由控制器輸出給整車模型,通過與理想狀態對比,確定此時車輛的偏差,作為控制器的其中一個輸入參數。RBF神經網絡通過逼近外界的干擾項以及建模誤差實現自適應控制。自適應律由李雅普諾夫穩定性原理推導得出,并證明了控制器的穩定性。
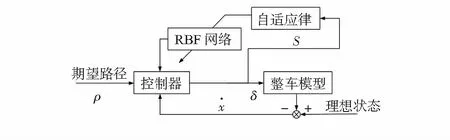
圖1 控制系統結構框圖
2 車輛橫向控制模型
2.1 車輛二自由度運動模型
控制器的設計以二自由度轉向模型為基礎。根據文獻[11]對實際車輛假設如下:1)忽略轉向機構的影響,將前輪轉角作為輸入,且認為左右車輪轉角大小一樣;2)忽略車輛懸架對車輛運動特性的影響,忽略車輛垂直、俯仰、側傾運動,將車輛運動看作是與地面平行的平面運動;3)忽略左右車輪輪胎由于載荷變化引起的輪胎側偏特性的差異。根據假設,車輛在行駛過程中,輪胎與地面不存在側向滑動且左右輪胎動力學對稱,則每個車軸上的2個車輪可以用1個車輪來代替,這樣車輛就簡化為二輪車輛模型。

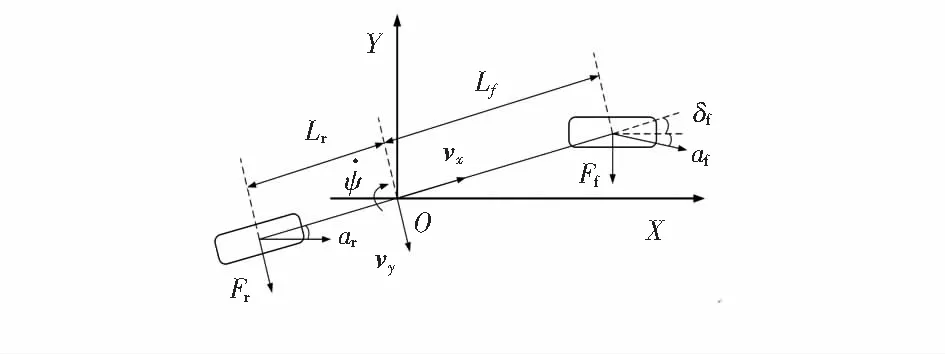
圖2 二自由度車輛轉向模型
根據牛頓第二定律,得到車輛的橫向動力學方程為
(1)
(2)
式中m為車輛質量;Cf,Cr為前后輪胎側偏剛度;Iz為車輛轉動慣量。
2.2 整車七自由度運動模型
為了使仿真的數據與實際情況更接近,整車模型采用更具代表性的七自由度4輪模型,如圖3所示。由此建立整車模型如下:
1)縱向動力學方程

(Fyrl+Fyfr)sinδf
(3)
2)橫向動力學方程
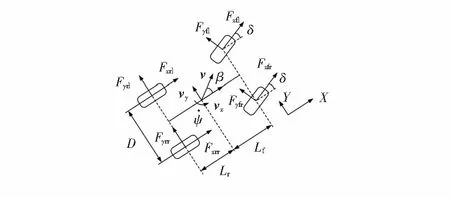
圖3 七自由度車輛動力學模型

(Fyfl+Fyfr)cosδf
(4)
3)橫擺運動方程

(5)
2.3 輪胎模型
本文所采用的Dugoff輪胎模型[12]屬于理論模型,相對其他輪胎模型,Dugoff模型對精確輪胎參數的依賴性更小,而仿真精度較高。
輪胎縱向力和側向力分別為
Fxij=fijkxijSij
(6)
Fyij=fijkyijαij
(7)
(8)
(9)
整車質心側偏角為
(10)
各輪胎的滑移率分別為
(11)
各輪胎的側偏角分別為
(12)
(13)
各個輪胎的垂直載荷為
(14)
(15)
(16)
(17)
式中Fxij,Fyij為輪胎的縱向力和側向力;kxij,kyij為輪胎縱向和側向的側偏剛度;αij為輪胎的側偏角;μHij為輪胎與路面最大附著系數;re為車輪滾動半徑;wij為車輪滾動角速度;uij為車輪中心速度;ax為縱向加速度;ay為橫向加速度;h為質心高度。
2.4 控制問題描述
通過傳感器采集當前車輛信息確定出與期望路徑的偏差e。
對于給定的參考路徑會有
(18)

(19)
聯合公式(1)、式(2)、式(19)得到控制系統的狀態方程

(20)
式中 狀態變量為

(21)
(22)
此時控制輸入為
(23)
在此基礎之上,定義新的誤差
(24)
則新的控制器的狀態方程變為
x~=Ax~+Bδ~
(25)
考慮到車輛在行駛時的外界干擾以及系統的建模誤差,控制器的設計根據x~=Ax~+Bδ~+D設計。
3 神經網絡滑模控制器設計
3.1 滑模變結構控制
滑模控制器[14]的設計包括滑模面s(t)和滑模函數u(t),其作用,首先,將空間某一狀態在控制作用下運動到所設計的滑模面上,然后設計一個控制律保證被轉移到滑模面上的點始終在滑模面上運動,并在有限的時間內到達原點。定義滑模面的形式為
(26)

δ~=-(MB)-1(MAx~+MD+ks(t)+ζsgn(s(t))
(27)
在實際工況中,外界干擾不可知,同時存在建模誤差,為此采取RBF神經網絡進行逼近。RBF神經網絡[15]為3層前饋式網絡結構,包括輸入層、中間層和輸出層。結構中,RBF網絡的輸出,即
(28)
式中m為隱含層神經個數;w為權值;h為高斯基函數,其表達式為
(29)
式中xi為輸入;cj=|cj1cj2|為中間層第j個神經元高斯基函數中心點的坐標向量;bj為隱含層第j個神經元高斯基函數的寬度。

3.2 穩定性分析

=-ks-ξsgn(s)+M(-W~Th+ε)
(30)
針對本文的設計的控制器,構造Lyapunov函數為
(31)
對Lyapunov函數求導得




(32)


(33)
4 仿真試驗分析
4.1 算法有效性分析
為驗證本文所提出控制方法的有效性,本文在Matlab2014a平臺下進行了仿真試驗,具體車輛參數設置為:整車質量m為1 850 kg;前、后輪胎側偏剛度Cf,Cr為62 850,72 000 N·rad-1;整車繞z軸轉動慣量IZ為2 549 kg·m2;質心至前、后軸距離Lf,Lr為1.142,1.563 m;質心高度h為0.512 m;輪距D為1.25 m。
將神經網絡滑模控制器和單一滑模控制器的控制效果進行仿真對比,參數設置相同,速度設為vx=10 m/s,k=10,ξ=1。圖4(a)為橫向偏差的響應曲線對比圖,圖4(b)為橫擺角速度偏差響應曲線對比圖。
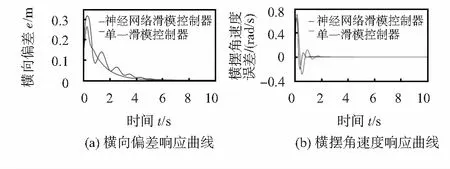
圖4 橫向偏差和橫擺角速度偏差響應曲線對比圖
由圖4可知,采用神經網絡滑模控制器相比單一滑模控制有更好的表現,具有響應速度快,抖振小,能夠迅速消除橫向偏差等優點。表1為兩種控制器仿真實驗數據。
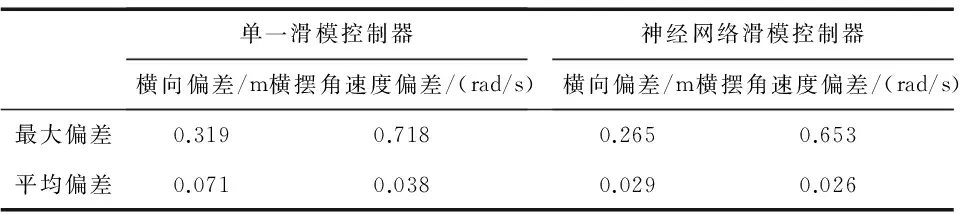
表1 單一滑模控制器和神經網絡滑模控制器仿真實驗數據
從表1可以看出,采用神經網絡滑模比單一滑模的控制精度更高。本文以橫向平均偏差作為控制器的控制精度,則控制精度提高了11 %。
4.2 算法魯棒性分析
由圖5(a)可知:隨著縱向速度增快,橫向偏差會相應增大,但在短時間內偏差會迅速收斂,說明本文提出的控制算法對車速變化有較強的適應性,收斂速度較快。

圖5 不同速度、不同載荷以及帶有外部干擾時的橫向偏差響應曲線
由圖5(b)看出:控制器對于載荷的變化同樣具有較好的魯棒性,橫向偏差均在較小的范圍內變化。為了進一步驗證系統魯棒性,在仿真實驗中加入了正弦函數作為外部干擾,兩種控制器的仿真結果對比如圖5(c)所示。
由圖5(c)看出:單一滑模控制器在有外部干擾的情況下誤差較大較神經網絡滑模控制器則有較強的適應能力,魯棒性較好。
5 結 論
1)構建了車輛二自由度和七自由度動力學模型,對車輛橫向控制系統的狀態方程進行了描述,并推導出新的控制系統狀態方程。
2)提出了神經網絡滑模控制方法解決車輛橫向控制問題。設計了神經網絡滑模控制器,通過RBF神經網絡實現對外界干擾和建模誤差的逼近,利用Lyapunov函數推導了神經網絡權值的自適應律,并證明了系統的穩定性。
3)仿真結果表明:本文所提方法能夠有效降低滑模控制的抖振現象,同時,對外界干擾和建模誤差等能夠有效抑制,有較高魯棒性。
[1] 李舜酩,沈 峘,毛建國,等.智能車輛發展及其關鍵技術研究現狀[J].傳感器與微系統,2009,28(1):1-3.
[2] 郭景華,胡 平,李琳輝,等.基于遺傳優化的無人車橫向模糊控制[J].機械工程學報,2012,48(6):76-82.
[3] 趙俊熙,陳慧巖.智能車輛路徑跟蹤橫向控制方法的研究[J].汽車工程,2011,33(5):382-387.
[4] 王家恩,陳無畏,王檀彬,等.基于期望橫擺角速度的視覺導航智能車輛橫向控制[J].機械工程學報,2012(4):108-115.
[5] Gregor Klancar,Igor Skrjanc.Track-error model-based predictive
control for mobile robots in real time[J] .Robotics and Autonomous System,2007,55:460-469.
[6] Soualmi B,Sentouh C,Popieul J C,et al.Fuzzy takagi-sugeno LQ controller for lateral control assistance of a vehicle[C]∥International IEEE Conference on Intelligent Vehicles(IV)Symposium,2007.
[7] Onieva E,ENaranjo J,Milanes V,et al.Automatic lateral control for unmanned vehicle via genetic algorithms [J].Applied Soft Computing,2011,11:1303-1309.
[8] Zheng Shuibo,Tang Houjun,Han Zhengzhi,et al.Control design for vehicle stability enhancement [J].Control Engineering Practice,2006,14:1413-1421.
[9] Imine H,Madani T.Sliding-mode control for automated lane gui-dance of heavy vehicle[J].International Journal of Robust and Nonlinear Control,2013, 23:67-76.
[10] Gilles Tagne,Reine Talj,Ali Charara.Higher-order sliding mode control for lateral dynamics of autonomous vehicles,with experimental validation[C]∥International IEEE Conference on Intelligent vehicles(IV)Symposium,2013:67-76.
[11] 喻 凡,林 逸.汽車系統動力學[M].北京:機械工程出版社,2005.
[12] 皮大偉,陳 南,張丙軍.基于主動制動的車輛穩定性系統最優控制策略[J].農業機械學報,2009,40(11):1-6.
[13] Rajesh Rajamani.Vehicle dynamics and control[M].Berlin/Heidelberg:Springer,2012.
[14] 于 馳,宮明龍.多輸入多輸出系統的滑模控制器設計及其應用[J].東北大學學報:自然科學版,2012,33(2):187-190.
[15] Fei Juntao,Ding Hongfei.Adaptive sliding mode control of dyna-mic system using RBF neural network[J].Nonlinear Dynamics,2012,70:1563 -1573.
Lateral control of intelligent vehicle based on neural networks sliding mode*
CHEN Tao, CHEN Dong
(State Key Laboratory of Advanced Design and Manufacture for Vehicle Body,Hunan University,Changsha 410082,China)
The RBF neural networks sliding mode control method is proposed to solve the highly nonlinear dynamic characteristic and parametric uncertain properties of the intelligent vehicle model as well as the low control precision and poor robustness caused by massive external interference during driving.A two degrees of freedom(DOF)linear vehicle model is built along with a seven DOF non-linear vehicle model.A new state equation is derived based on traditional state equation of the two DOF vehicle control method and the corresponding controller is designed.The Lyapunov stability theory is involved to derive the weights of the neural network and the stability of the control system is verified.Simulation results show that the proposed method has higher control precision and stronger robustness compared with the traditional sliding mode control method.
intelligent vehicle; neural networks; sliding mode control; lateral control
10.13873/J.1000—9787(2017)05—0063—05
2016—05—31
國家自然科學基金資助項目(61540031);湖南省自然科學基金資助項目(14J3055);中國博士后科學基金資助項目(2014M552132);國汽(北京)開放基金資助項目(20130303);中美清潔能源項目(2014DFG71590—101);中央高校基本科研業務費資助項目
U 461.91
A
1000—9787(2017)05—0063—05
陳 濤(1978-),男,碩士生導師,副教授,主要從事汽車主被動安全、汽車CAE技術、空氣動力學等工作。
陳 東(1990-),男,通訊作者,碩士研究生,主要研究方向為主安全、汽車電子,E—mail:chen.dong1990@163.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
