捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差動態(tài)特性研究
2017-05-10 13:00:44李麗錦周志廣
傳感器與微系統(tǒng) 2017年5期
李麗錦, 周志廣, 段 勇
(西北工業(yè)大學(xué) 第365研究所,陜西 西安 710072)
捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差動態(tài)特性研究
李麗錦, 周志廣, 段 勇
(西北工業(yè)大學(xué) 第365研究所,陜西 西安 710072)
在不考慮羅差情況下,建立了捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差模型,并結(jié)合無人機(jī)磁航向測量系統(tǒng)中框架式垂直陀螺儀的姿態(tài)測量特點,將其姿態(tài)誤差源特征引入誤差模型,全面分析了其航向角在不同飛行條件下的動態(tài)誤差特性。對捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差模型進(jìn)行了仿真計算,并將仿真結(jié)果與飛行實驗結(jié)果進(jìn)行了比較分析。結(jié)果表明:捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差動態(tài)特性符合無人機(jī)測量誤差特點,能夠為工程應(yīng)用提供直接的理論依據(jù)。
捷聯(lián)式; 磁航向; 動態(tài)誤差; 陀螺儀; 姿態(tài)誤差
0 引 言
捷聯(lián)式磁航向測量系統(tǒng)通常由三軸磁傳感器和姿態(tài)測量設(shè)備組成。三軸磁傳感器直接安裝在載體座架上,敏感大地磁場沿載體機(jī)體坐標(biāo)的三個磁場分量;姿態(tài)測量設(shè)備用于敏感載體的姿態(tài)角(即俯仰角和傾斜角)。捷聯(lián)式磁航向測量系統(tǒng)的航向角則根據(jù)三個磁場分量和姿態(tài)角計算而得,該種配置較傳統(tǒng)的磁羅盤結(jié)構(gòu)簡單,可靠性高,測量精度大幅提高[1],生產(chǎn)成本卻大幅下降。捷聯(lián)式磁航向測量系統(tǒng)已經(jīng)在小型無人機(jī)的航向測量中占據(jù)非常重要的地位,在船只、地面車輛以及智能手機(jī)上的應(yīng)用也越來越廣。
本文針對捷聯(lián)式磁航向測量系統(tǒng)的航向角測量原理,在不考慮羅差情況下,研究動態(tài)條件下航向角測量的特性,建立了其誤差模型;同時,結(jié)合無人機(jī)姿態(tài)測量的特點,引入框架式垂直陀螺儀的測量誤差項,綜合分析了在動態(tài)條件下無人機(jī)磁航向測量系統(tǒng)的航向角誤差特性。
1 系統(tǒng)航向角測量原理
地理坐標(biāo)系(p系):原點在載體重心,X軸指向北,Y軸指向東,Z軸沿地垂線指向地。機(jī)體坐標(biāo)系(b系):原點在飛機(jī)重心,X軸指向縱軸方向,Y軸指向飛機(jī)右側(cè),Z軸沿飛機(jī)垂直向下。φ,θ分別表示由捷聯(lián)式磁航向測量系統(tǒng)中框架式垂直陀螺儀測量的飛機(jī)橫滾角和俯仰角。
捷聯(lián)式磁航向測量系統(tǒng)中航向角φ可通過大地磁場在飛機(jī)機(jī)體三軸的磁場分量,并結(jié)合飛機(jī)的俯仰角θ、橫滾角φ計算,然后經(jīng)過修正后得到。
設(shè)Xb,Yb,Zb為大地磁場在飛機(jī)機(jī)體的三軸磁場分量,Xp,Xp,Zp為大地磁場在當(dāng)?shù)氐乩硐档娜S磁場分量。
捷聯(lián)式磁航向測量系統(tǒng)的未經(jīng)修正航向角φM計算公式如式(1)所示[2]
(1)
式中
2 系統(tǒng)航向角誤差模型
(2)
式中 C1,C2為常數(shù),統(tǒng)稱為羅差[4]。若不考慮羅差,捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差全部來源于姿態(tài)角(即俯仰角θ、橫滾角φ)誤差,根據(jù)二元函數(shù)的全微分計算方法,則有[5]
(3)

由于Δθ和Δφ均為小量,有,cosΔφ≈1,cosΔθ≈1,sinΔφ≈Δφ,sinΔθ≈Δθ,則
(4)
將式(4)代入式(3)中得
ΔφM=sinθΔφ-sinφtanβ·Δθ+tanβ·cosφcosθΔφ
(5)
式中ΔφM即為在不考慮羅差情況下捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差模型。
由式(5)可看出,在不考慮羅差情況下,捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差模型中誤差源不僅與姿態(tài)角誤差(Δθ和Δφ)有關(guān),還與當(dāng)時的姿態(tài)角(θ和φ)、航向角φ,以及當(dāng)?shù)卮艃A角β有關(guān)。
3 飛機(jī)勻速飛行分析
假設(shè)飛機(jī)勻速飛行,在不考慮羅差的情況下,則當(dāng)?shù)卮艃A角β為定值,當(dāng)時姿態(tài)角 (θ和φ)和航向角φ亦視為定值,框架垂直陀螺儀姿態(tài)測量誤差(Δθ和Δφ)視為常值誤差。因此,在飛機(jī)勻速飛行時,捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差φM為常值誤差。
4 飛機(jī)水平加速運動分析
假設(shè)飛機(jī)作水平加速飛行,縱向加速度為a,則作用在框架式垂直陀螺儀擺上的慣性力使其沿縱軸偏離地垂線,處于視垂線位置,使縱修正裝置將產(chǎn)生錯誤的修正力矩,使自轉(zhuǎn)軸向視垂線進(jìn)動而沿橫向偏離地垂線,從而會造成框架式垂直陀螺儀的俯仰角測量誤差Δθ為[6]
(6)
式中 ta為飛機(jī)連續(xù)加速時間;Mky為作用在框架垂直陀螺儀外環(huán)上修正外力矩;H為框架式垂直陀螺儀的角動量。
由式(6)可看出,由于飛機(jī)水平加速所引起的框架式垂直陀螺儀的俯仰角測量誤差Δθ與時間成正比。因此,假設(shè)飛機(jī)在水平加速飛行時,在不考慮羅差的情況下,捷聯(lián)式磁航向測量系統(tǒng)的航向角計算誤差φM主要由框架式垂直陀螺儀的俯仰角測量誤差Δθ決定,即隨加速時間成線性增長,直至框架式垂直陀螺儀自轉(zhuǎn)軸被錯誤修正到視垂線位置。如若飛機(jī)加速的時間較長,勢必引起框架式垂直陀螺儀的俯仰角測量誤差Δθ較大,因此,捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差φM較大,應(yīng)盡量減小該航向角數(shù)據(jù)在系統(tǒng)中的控制權(quán)重。
5 飛機(jī)盤旋運動分析
假設(shè)飛機(jī)作盤旋飛行,由于盤旋角速率ωζ的作用,則沿橫向必存在向心加速度,從而存在向心力,這時框架式垂直陀螺儀的擺受到重力和向心力的合力作用,沿橫向偏離地垂線,處于視垂線位置, 這時框架式垂直陀螺以橫向修正裝置將產(chǎn)生錯誤的修正力矩,使自轉(zhuǎn)軸向視垂線進(jìn)動而沿橫向偏離地垂線,從而造成傾斜角的測量誤差Δφ。而且,由于飛機(jī)盤旋角速度的影響,還將引起自轉(zhuǎn)軸沿縱向偏離地垂線,從而引起俯仰角的測量誤差Δθ,而此時Δφ和Δθ與時間呈正弦變化。因此,當(dāng)飛機(jī)盤旋時,在不考慮羅差的情況下,捷聯(lián)式磁航向測量系統(tǒng)的航向角誤差φM隨俯仰角測量誤差和傾斜角測量誤差變化而變化,即與時間呈周期性正弦變化,此時控制系統(tǒng)應(yīng)合理調(diào)整該航向角數(shù)據(jù)在系統(tǒng)中的控制權(quán)重。
6 仿真與實驗結(jié)果
以姿態(tài)雙備份的無人機(jī)為例,將高精度光纖組合慣導(dǎo)數(shù)據(jù)與磁航向測量系統(tǒng)數(shù)據(jù)進(jìn)行仿真和實驗驗證。
6.1 仿真結(jié)果
當(dāng)?shù)卮艃A角為52°,提取飛機(jī)飛行部分?jǐn)?shù)據(jù),以光纖組合慣導(dǎo)輸出的姿態(tài)角(θ和φ)為基準(zhǔn),與框架式垂直陀螺儀測量的姿態(tài)角對比,計算磁航向測量系統(tǒng)的姿態(tài)角測量誤差(Δθ和Δφ);并以光纖組合慣導(dǎo)輸出的姿態(tài)角(θ和φ)和航向角φ為輸入,按式(5)仿真計算磁航向測量系統(tǒng)的航向角誤差φM。
飛機(jī)平飛時,磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果如圖1(a)所示;飛機(jī)水平加速時,磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果如圖1(b)所示;飛機(jī)盤旋時,磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果如圖1(c)所示。

圖1 飛行仿真實驗結(jié)果
6.2 實驗結(jié)果
以光纖組合慣導(dǎo)的航向角輸出為基準(zhǔn),與磁航向測量系統(tǒng)的航向角對比,統(tǒng)計磁航向測量系統(tǒng)的航向角誤差實驗結(jié)果。
1)飛機(jī)平飛時,磁航向測量系統(tǒng)的航向角誤差實驗結(jié)果如圖2(a)所示; 飛機(jī)水平加速時,磁航向測量系統(tǒng)的航向角誤差實驗結(jié)果如圖2(b)所示; 飛機(jī)盤旋時,磁航向測量系統(tǒng)的航向角誤差實驗結(jié)果如圖2(c)所示。
2)光纖組合慣導(dǎo)航向角變化如圖3所示。
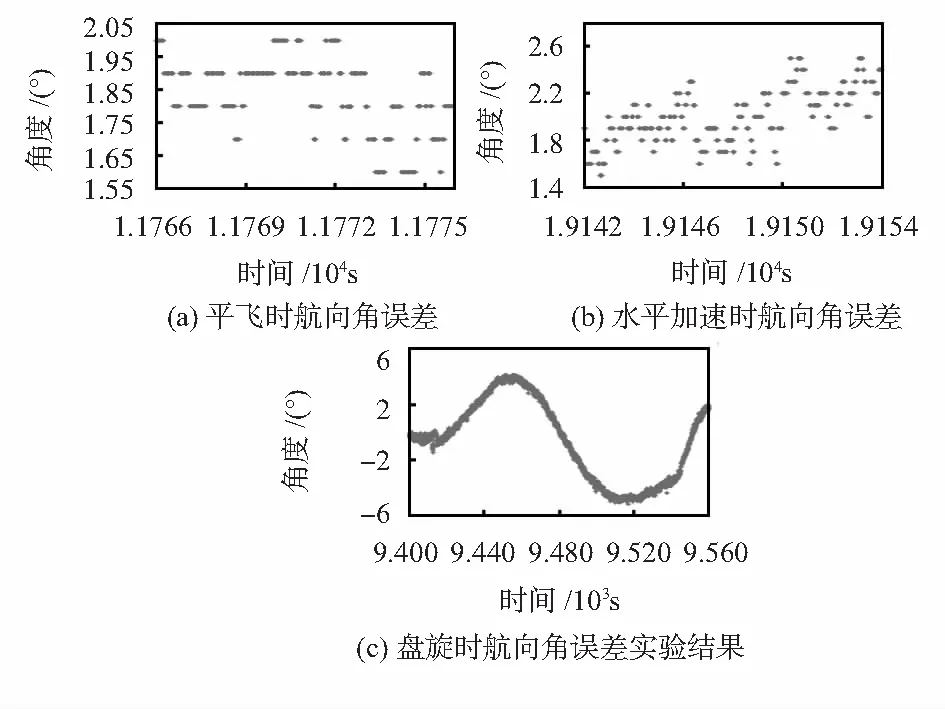
圖2 飛行實驗結(jié)果
6.3 仿真和實驗結(jié)果分析
1)磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果和實驗結(jié)果變化趨勢基本一致。但是由于磁場分量測量誤差和磁偏角的存在,兩者存在常值偏差。
2)由圖1(a)、圖2(a)看出:在飛機(jī)平飛過程中,磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果和實驗結(jié)果均為常值;由圖1(b)、圖2(b)看出:在飛機(jī)水平加速過程中,磁航向測量系統(tǒng)的航向角誤差仿真結(jié)果和實驗結(jié)果隨時間呈增長趨勢;由圖1(c)、圖2(c)、圖3中可以看出:在飛機(jī)盤旋狀態(tài)下,磁航向測量系統(tǒng)的航向誤差仿真結(jié)果和實驗結(jié)果,都呈周期性正弦變化;同時,在航向角為0°和180 °附近誤差最大,而在航向角為90°和270°附近,誤差最小。這是因為在飛機(jī)盤旋過程中,俯仰角誤差較小,其航向角誤差主要取決于傾斜角誤差。驗證了實際工程應(yīng)用中“東西誤差看俯仰,南北誤差看傾斜”的經(jīng)驗語。

圖3 盤旋時光纖組合慣導(dǎo)航向角變化圖
7 結(jié)束語
本文著眼于無人機(jī)捷聯(lián)式磁航向測量系統(tǒng),在不考慮羅差影響的前提下,對其航向角誤差的動態(tài)特性進(jìn)行研究。通過對磁航向測量系統(tǒng)的航向角誤差原理性推導(dǎo),結(jié)合無人機(jī)特點,對其姿態(tài)測量設(shè)備框架式垂直陀螺儀的運動特性進(jìn)行模型解析分析,并將姿態(tài)角誤差源引入磁航向測量系統(tǒng)的航向角誤差模型中,全面且綜合分析該航向角在無人機(jī)不同動態(tài)條件下的誤差特性,為工程應(yīng)用中定性分析航向角誤差提供理論基礎(chǔ),并為控制系統(tǒng)提高控制精度提供直接依據(jù)。同時在此基礎(chǔ)上進(jìn)行了誤差仿真,并進(jìn)行實驗對比和驗證。這對于航空工程應(yīng)用中尤其是余度控制誤差研究乃至保障控制系統(tǒng)任務(wù)作業(yè)精度有著重要的意義。
[1] 王勇軍,李 智.三軸電子磁羅盤的設(shè)計與誤差校正[J].傳感器與微系統(tǒng),2010,29(10):110-112.
[2] Race R,Schott C,Huber S.Electronic compass sensor[C]∥Proceeding of IEEE,2004:1446-1449.
[3] 陸建山,王昌明.數(shù)字磁羅盤的航向角干擾補(bǔ)償方法研究[J].傳感器與微系統(tǒng),2010,29(6):75-76.
[4] Yang Y M,Wang Y N,Yuan X F.Bidirectional extreme learning machine for regression problem and its learning effective[J].IEEE Transaction on Neural Networks,2012,23(9):1498-1505.
[5] 李 艷,管 斌.電子磁羅盤航向誤差推導(dǎo)及分析[J].儀器儀表學(xué)報,2013,34(7):1566-1571.
[6] 李麗錦,湯恒先.框架式垂直陀螺儀誤差特性研究[J].傳感器與微系統(tǒng),2015,34(12):51-53.
Research on dynamic error characteristics of strapdown magnetic heading measurement system
LI Li-jin, ZHOU Zhi-guang, DUAN Yong
(No.365 Research Institute,Northwestern Polytechnical University,Xi’an 710072,China)
Error model of strapdown magnetic heading measurement system without considering magnetic deviation is built up,the dynamic error characteristics of magnetic heading under different flight condition for UAV is analyzed,combined with the attitude measurement characteristics of the frame type vertical gyro which is introduced into the error model.Error model is simulated,at the same time the simulation results and the experimental results are analyzed.The results show that the dynamic error character of the strapdown magnetic heading measurement system accords with the measurement error characteristics,and can provide theoretical basis for engineering application.
strapdown; magnetic heading; dynamical error; gyroscope; attitude error
10.13873/J.1000—9787(2017)05—0052—03
2016—05—20
TP 202
A
1000—9787(2017)05—0052—03
李麗錦(1982-),女,高級工程師,主要從事無人機(jī)機(jī)載測量設(shè)備技術(shù)的研究工作,E—mail:leeljin@sina.com。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
